Компьютерная методика выбора параметров механизма защёлок периферийного стыковочного агрегата

Автор: Чернышев Иван Евгеньевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Проектирование, конструкция и производство летательных аппаратов
Статья в выпуске: 4 (35), 2021 года.
Бесплатный доступ
При разработке отечественного периферийного стыковочного агрегата, соответствующего Международному стандарту систем стыковки, возникла задача уменьшения габаритов механизмов защёлок, обеспечивающих сцепку. В статье описан принцип работы этих механизмов. Предложена методика, позволяющая выбрать такое расположение их шарниров, при котором звенья находятся внутри заданной области в процессе функционирования. Для формирования различных вариантов расположения шарниров используется равномерная ЛПт-последовательность. Описан способ оценки максимальных нагрузок, действующих на звенья. Показано, что уменьшение габаритов существующего механизма защёлок возможно только при увеличении несущей способности звеньев. Предложенная методика является частью программного инструмента, автоматизирующего проектирование нового механизма защёлок.
Стыковка космических аппаратов, периферийный стыковочный агрегат, механизм защёлок, сцепка, лпт-последовательность
Короткий адрес: https://sciup.org/143178164
IDR: 143178164 | УДК: 629.78.027.7-272 | DOI: 10.33950/spacetech-2308-7625-2021-4-42-52
The computer method for choosing the parameters of the peripheral docking unit's latch mechanism
During development of the native peripheral docking unit in accordance with the International Docking System Standard, there was a problem of reducing the size of the latch mechanism that provides capture. The article describes the principle of the latch mechanism operation. The method allowing choosing such positions of joints, that links are in the given area, is considered. The uniform LPT-sequence is used for the generation various positions of joints. The estimation process of the maximum loads operating to links is described. It is shown what reducing the size of the existing latch mechanism is possible only with the increasing of permissible loads. The considered method is a part of the software tool for the latch mechanism automatic design.
Текст научной статьи Компьютерная методика выбора параметров механизма защёлок периферийного стыковочного агрегата
Стыковка космических аппаратов — это управляемый механический процесс их сборки на орбите с использованием активного и пассивного стыковочных агрегатов. Стыковочный механизм активного агрегата обеспечивает выполнение условий для образования первичной механической связи между стыкующимися аппаратами (сцепки), поглощение энергии сближения активного космического аппарата, выравнивание и стягивание агрегатов для их окончательного жёсткого соединения. Пассивный агрегат содержит элементы, как правило, неподвижные, обеспечивающие ответный интерфейс активному агрегату и его стыковочному механизму. Андрогинным называется агрегат, который может быть как активным, так и пассивным.
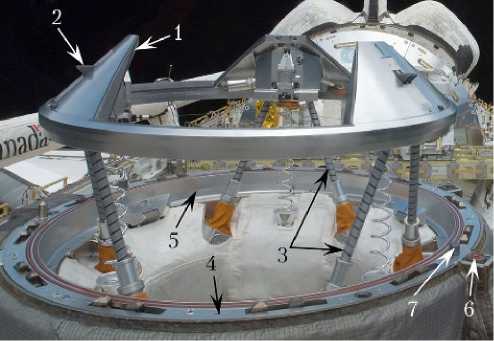
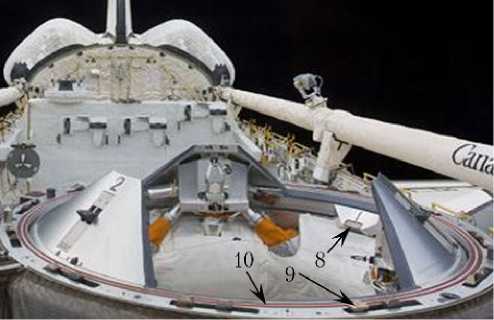
Во всех известных периферийных стыковочных агрегатах, доведённых до практического применения, сцепка обеспечивается механизмами защёлок (рис. 1), которые расположены на буферном звене [1]. Их запирающие звенья зацепляются за ответные упоры, установленные на пассивном стыковочном агрегате. После образования жёсткого и герметичного соединения агрегатов (вторичной механической связи) механизмы защёлок по команде разрушают первичную механическую связь, установленную ранее (производят расцепление).
Существующий вариант кинематической схемы механизма защёлок был предложен NASA в 1972 г. [2] для проекта «Экспериментальный полёт Аполлон – Союз» ЭПАС-75 [3]. Инженеры НПО «Энергия» улучшили конструкцию этого механизма [1], так что по завершении проекта ЭПАС его модификации использовались в стыковочных агрегатах кораблей Space Shuttle, и с некоторыми доработками — на корабле CST-100 Starliner в составе агрегата NASA Docking System фирмы Boeing [4, 5]. Интерфейс механизма защёлок (габариты, ход выступающей части запирающего звена, взаимодействующей с ответным упором) включён в Международный стандарт систем стыковки International Docking System Standard (IDSS) [6].
а)
б)
Рис. 1. Андрогинный стыковочный агрегат корабля Space Shuttle: а — активный; б — пассивный; 1 — направляющий выступ стыковочного кольца (буферного звена); 2 — запирающее звено механизма защёлок; 3 — штанги; 4 — стыковочная плоскость; 5 — корпус агрегата; 6 — транзитный электроразъём; 7 — пружинный толкатель; 8 — ответные упоры; 9 — крюки вторичной механической связи; 10 — герметизирующее уплотнение
РКК «Энергия» ведёт разработку нового периферийного стыковочного механизма [7], в основе кинематической схемы которого лежит платформа Гью [8]. В нём стыковочное кольцо (буферное звено) соединяется с корпусом агрегата при помощи шести штанг, функционирующих независимо друг от друга. Штанги крепятся к кольцу и корпусу посредством вращательных шарниров. Расстояние между шарнирами соседних штанг должно быть минимальным для увеличения угла наклона штанг с целью улучшения выравнивания стыковочного кольца в боковом направлении и по крену, а также увеличения осевого хода кольца для улучшения условий сцепки. Уменьшению расстояния между шарнирами на кольце препятствует существующий вариант конструкции механизмов защёлок, установленных между ними.
Вопросы проектирования механизмов защёлок периферийного агрегата в литературе не рассмотрены. В работах [1, 2, 4, 5] дано лишь краткое описание вариантов их конструкций. Актуальна разработка методики, позволяющей выбирать параметры звеньев этих механизмов для уменьшения их габаритов, сохраняя при этом интерфейс.
Принцип работы существующего механизма защёлок
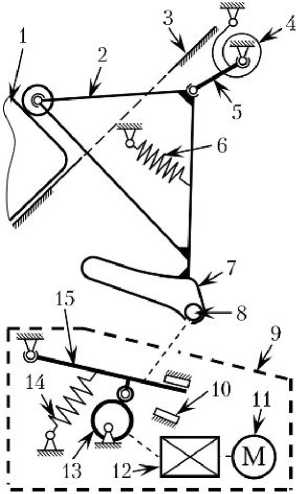
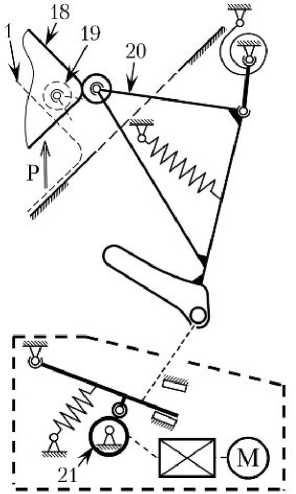
В начале процесса стыковки сближаются и совмещаются кольца активного и пассивного стыковочных агрегатов. Относительное выравнивание колец при этом сближении для их точного совмещения происходит за счёт расположенных на кольцах направляющих выступов. Когда кольца полностью совмещены, их движение друг относительно друга невозможно. Задачей механизмов защёлок, находящихся в закрытом состоянии, является сохранение указанного положения колец после зацепления запирающих звеньев за ответные упоры. Кинематическая схема механизма защёлок представлена на рис. 2, а . Её можно разделить на две части: привод и рычажный исполнительный механизм, включающий в себя серьгу и запирающее звено.
Процесс зацепления запирающего звена за ответный упор происходит следующим образом. При совмещении колец ответный упор, расположенный на пассивном агрегате, надавливает на соответствующее запирающее звено механизма защёлок, установленного на
а)
б)
в)
Рис. 2. Кинематическая схема механизма защёлок (а), сцепка (б), расцепление (в): 1 — положение ответного упора после сцепки и до расцепления; 2 — положение запирающего звена после сцепки и до расцепления; 3 — основание механизма защёлок, связанное с направляющим выступом кольца; 4, 6, 14 — пружины; 5 — серьга, 7 — фигурный паз; 8 — шип; 9 — привод; 10 — ограничитель углового хода рычага; 11 — электромотор; 12 — редуктор; 13 — положение кулачка, соответствующее закрытому состоянию механизма; 15 — рычаг; 16 — ответный упор отклоняет запирающее звено при сближении колец; 17 — запирающее звено максимально отклонено под направляющий выступ; 18 — ответный упор отклоняет запирающее звено при расцеплении; 19 — положение запирающего звена перед расцеплением; 20 — положение запирающего звена при расцеплении; 21 — положение кулачка, соответствующее открытому состоянию механизма
Примечание. С — вариант перемещения ответного упора при сцепке; Р — перемещение ответного упора при расцеплении.
кольце активного стыковочного агрегата (рис. 2, б ), отклоняет это звено с траектории своего движения под направляющий выступ, взводя пружины этого механизма. Когда упор оказывается за запирающим звеном (кольца при этом совмещены), то оно под действием взведённых пружин выдвигается, блокируя обратное движение упора и тем самым препятствуя расхождению колец. Описанная конфигурация представлена на рис. 2, а . Механизмы защёлок переводятся в открытое состояние при необходимости расцепить кольца для последующей расстыковки. Для этого привод каждого механизма поворачивает кулачок в положение, показанное на рис. 2, в , и рычаг, опирающийся на него, увлекает за собой шип, взаимодействующий с фигурным пазом запирающего звена. В такой конфигурации рычажного исполнительного механизма ответный упор имеет возможность отклонить запирающее звено с траектории своего движения, производя расцепление при увеличении расстояния между кольцами активного и пассивного стыковочных агрегатов.
Правильное функционирование механизма защёлок при сцепке и расцеплении определяется расположением шарниров рычажного исполнительного механизма и соответствующей формой фигурного паза. Методика построения фигурного паза в данной работе не рассматривается.
Актуальность разработки и общее описание методики
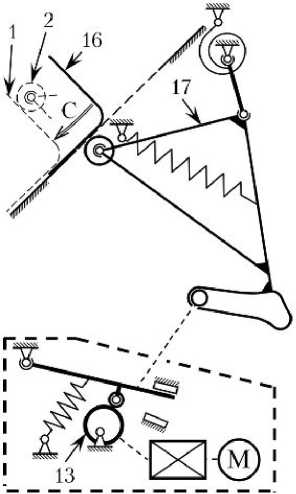
Конструкция существующего варианта механизма защёлок внедряется в область 9 (рис. 3) расположения шарниров штанг, устанавливаемых на стыковочном кольце нового периферийного стыковочного агрегата. Для решения этой проблемы необходимо выполнить перекомпоновку механизма защёлок. Перекомпоновка привода 5 этого механизма является типовой задачей и в рамках данной статьи не рассматривается. При разработке существующего варианта рычажного исполнительного механизма использовался инженерный подход: геометрические размеры звеньев 1 и 3 выбирались вручную графоаналитическим способом. Поэтому за приемлемое время удавалось рассмотреть относительно небольшое число вариантов конструкции. Расположение шарниров, соединяющих звенья механизма, практически не отличается от первого варианта 11, предложенного NASA в работе [4].
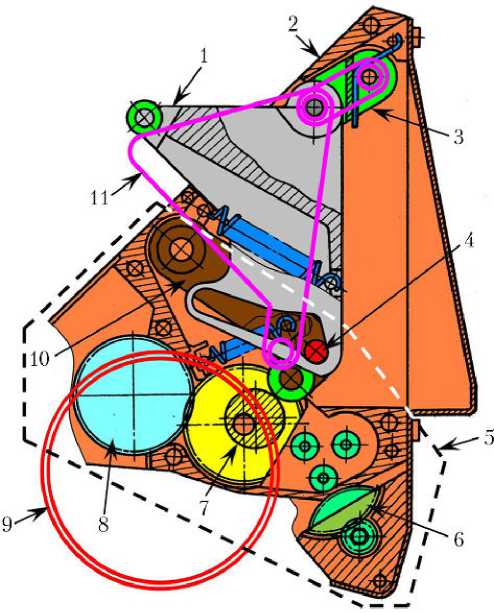
Рис. 3. Конструкция существующего варианта механизма защёлок: 1 — запирающее звено; 2 — основание механизма защёлок (часть направляющего выступа кольца); 3 — серьга; 4 — шип; 5 — привод; 6 — редуктор с электромотором; 7 — кулачок; 8 — контактное устройство; 9 — область требуемого расположения шарниров штанг; 10 — рычаг; 11 — контур первого варианта рычажного исполнительного механизма из патента NASA
Использование указанного подхода осложняется следующими факторами. Во-первых, интерфейс механизма защёлок, соответствующий IDSS, должен быть сохранён. Во-вторых, запирающее звено имеет две степени свободы; перемещения серьги и запирающего звена значительны и сопоставимы с их геометрическими размерами. В-третьих, для выбора несущей способности звеньев необходимо учитывать максимальные значения сил, возникающих в механизме защёлок при его функционировании. Поэтому актуальна разработка компьютерной методики выбора геометрических параметров серьги и запирающего звена механизма защёлок, позволяющей автоматизированно перекомпоновать рычажный исполнительный механизм с учётом новых проектных ограничений, сохранив при этом интерфейс. Проектными ограничениями являются:
-
• координаты области, за границу которой не должны выходить звенья механизма при функционировании;
-
• экспертные значения максимально допустимых сил, действующих на них.
Координаты области определяются требуемой компоновкой шарниров штанг и элементами конструкции, располагающимися в непосредственной близости от механизма защёлок. Ограничения на силы позволяют исключить варианты проектируемого механизма с чрезмерными требованиями к прочности звеньев. Если существует множество вариантов, соответствующих проектным требованиям, то из них экспертно выбирается один или несколько приемлемых вариантов для дальнейшей конструкторской проработки.
Общее описание предлагаемой методики представлено ниже. При формировании набора вариантов рычажного исполнительного механизма для последующей их экспертной оценки перебираются различные комбинации расположения шарниров серьги и запирающего звена. Для каждой комбинации оцениваются:
-
• максимальные значения сил, действующих на звенья механизма при его функционировании;
-
• габариты механизма на основе информации о его конфигурациях при сцепке и расцеплении.
Варианты, не удовлетворяющие заданным проектным ограничениям, автоматически исключаются из дальнейшего рассмотрения.
Способ оценки сил, действующих на звенья исполнительного механизма
Механизмы защёлок должны сохранять совмещённое состояние колец активного и пассивного стыковочных агрегатов вплоть до образования жёсткого герметичного переходного тоннеля между космическими аппаратами. Максимальная нагрузка на звенья рычажного исполнительного механизма действует в конце этапа стягивания при совмещении стыковочных плоскостей. Её величина определяется настройкой предохранительной муфты привода стягивания и известна заранее. Силы, совмещающей стыковочные плоскости, должно с запасом хватать на соединение транзитных электро- и гидроразъёмов, взведение пружинных толкателей и обжатие резинового герметизирующего уплотнения. Она распределяется между тремя механизмами защёлок и воздействует на их запирающие звенья со стороны ответных упоров. Её величина много больше сил, развиваемых пружинами рычажного исполнительного механизма, поэтому силами их сопротивления пренебрегаем.
После сцепки механизм защёлок неподвижен. Поэтому сумма сил и моментов, действующих на запирающее звено и серьгу, равна нулю. На запирающее звено действуют три силы, представленные на рис. 4: F 1 — со стороны ответного упора, её модуль определяется силой, развиваемой приводом стягивания, она направлена по нормали к поверхности ответного упора, контактирующего с роликом запирающего звена; F 2 — со стороны серьги, она лежит на прямой, проходящей через центры шарниров серьги, её единичный направляющий вектор n 2; F 3 — со стороны шипа. Известными являются — сила F 1, единичный направляющий вектор n 2, радиус-векторы r 1 и r 2 точек приложения сил F 1 и F 2, соответственно.
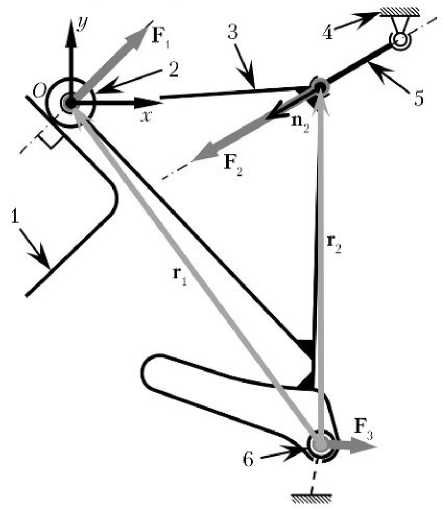
Рис. 4. Распределение сил в рычажном исполнительном механизме: 1 — ответный упор; 2 — ролик запирающего звена; 3 — запирающее звено; 4 — основание механизма защёлок; 5 — серьга; 6 — шип; F 1 , F 2 , F 3 — силы, действующие на запирающее звено; n 2 — единичный направляющий вектор; r 1 , r 2 — радиус-векторы точек приложения силы к запирающему звену; Oxy — используемая система координат
Силы F 2 и F 3 определяются решением следующей системы трёх уравнений с тремя неизвестными | F 2|, F 3 x и F 3 y :
F 1 x + | F 2 \-n 2 x + F 3 x = 0
< F 1 У + 1 F 2 \‘n 2 Y + F 3 У = 0
Г 1 X F 1 + Г 2 X ( 1 F 2 I 1 n 2 > = 0
где F 1 = [ F 1 x , F 1 y ] T , n 2 = [ n 2 x , n 2 y ] T и откуда искомые F 2 и F 3 равняются
F 2 = [| F 2|· n 2 x , | F 2| ·n 2 y ] T ,
F 3 = [ F 3 x , F 3 y ] T .
Список литературы Компьютерная методика выбора параметров механизма защёлок периферийного стыковочного агрегата
- Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
- Ratcliff L.P. Patent US № 3820741. Latch Mechanism (assignee NASA, appl. no. 301039, filed Oct. 26, 1972, registered June 28, 1974).
- Clinton E.E., Neuman L.E. SP-4209 The Partnership: A history of the Apollo-Soyuz test project an International Docking System, NASA, 1978. Режим доступа: https://www.hq.nasa.gov/ o ff ice/pao/History/ SP-4209/ch6 -5 .htm (дата обращения 25.01.2021 г.).
- McFatter J., Keizer K., Rupp T. NASA Docking System Block 1: NASA's new direct electric docking system supporting ISS and future human space exploration // Proc. of the 44th Aerospace mechanism symposium, NASA Glenn Research Center, May 16-18, 2018. P. 471-484. Режим доступа: https://core.ac.uk/download/pdf/ 161999912.pdf (дата обращения 22.09.2020 г.).
- Dick B., Mauch N, Rupp T. Capture Latch Assembly for the NASA Docking System. // Proc. of the 44th Aerospace mechanism symposium, NASA Glenn Research Center, May 16-18, 2018. P. 485-497. Режим доступа: http://aeromechanisms.com/ wp-content/uploads/2018/05/20180002828pdf (дата обращения 22.09.2020 г.).
- International Docking System Standard (IDSS) Interface Definition Document (IDD). Режим доступа: https:// internationaldockingstandard.com (дата обращения 22.09.2020 г.).
- Патент РФ № 2657623. Российская Федерация. Периферийный стыковочный механизм. Яскевич А.В., Павлов В.Н., Чернышев И.Е. Рассказов Я.В., Зем-цов Г.А., Карпенко А.А.; патентообладатель — ПАО «РКК «Энергия»; заявка 2017119305; приоритет от 01.06.2017 г.; дата регистрации 14.06.2018 г.; опубликовано 14.06.2018 г. // Бюллетень № 17.
- Gough V.E., Whitehall S.G. Universal type test machine // Proceedings of the FISITA Ninth International Technical Congress. May, 1962. P. 117-137.
- Препарата Ф., Шеймос М. Вычислительная геометрия: Введение. М.: Мир, 1989. 478 с.
- Соболь И.М. Точки, равномерно заполняющие многомерный куб. М.: Знание (Новое в жизни, науке, технике. № 2), 1985. 32 с.
- The Sobol Quasirandom Sequence // University of South Carolina, Department of Mathematics, 12.12.2009 г. Режим доступа: https://people.math.sc.edu/ Burkardt/cpp_src/sobol/sobol.html (дата обращения 22.09.2020 г.).
