Компьютерное моделирование ходьбы человека

Автор: Ракитова Ю.М., Сивашова Е.С.
Журнал: Физическое воспитание и спортивная тренировка @journal-fvist
Рубрика: Вопросы профессионального образования в сфере физической культуры и спорта
Статья в выпуске: 1 (5), 2013 года.
Бесплатный доступ
В биомеханике большое внимание уделяется рассмотрению ходьбы человека. Под ходьбой понимается автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей [1]. Однако некоторые особенности этого вида наземной локомоции остаются без внимания или без достаточного объяснения, что приводит к несформированности целостной картины явления у студентов. Одной из таких особенностей является факт повышения устойчивости равновесия человека при увеличении темпа его ходьбы.
Компьютерное моделирование, маятник капицы, ходьба человека
Короткий адрес: https://sciup.org/140125450
IDR: 140125450
Computer simulation of human walking
There are great attention is paid to the human walking in biomechanics. By walking is understood automated motor act which is carried out as a result of a complex coordinated activity of skeletal muscles of the trunk and limbs. However, some features of this type of terrestrial locomotion left unattended or without sufficient explanation, resulting in aborted complete picture of the phenomenon of students. One such feature is the fact that enhance the stability of the equilibrium of human with increasing the rate of its walking.
Текст научной статьи Компьютерное моделирование ходьбы человека
В настоящий момент компьютерное моделирование является одним из наиболее эффективных методов изучения разнообразных систем. Это связано с рядом факторов. Во-первых, компьютерные модели позволяют проводить численные эксперименты с объектами, реальные эксперименты с которыми затруднены или могут дать непредсказуемый результат. Во-вторых, логичность построения и строгая формализованность компьютерных моделей, упрощает процесс выявления определяющих факторов и исследование отклика изучаемой системы на изменение начальных условий и разнообразных параметров.
Компьютерное моделирование требует абстрагирования от конкретной природы явлений, построения сначала качественной, а затем и количественной модели. За этим следует проведение серии вычислительных экспериментов на компьютере, интерпретация результатов, сопоставление результатов моделирования с поведением исследуемого объекта, последующее уточнение модели и т.д.
Целью работы явилось изучение повышение устойчивости равновесия человека при увеличении темпа его ходьбы.
Методика исследования. В качестве метода моделирования исследуемого явления было выбрано компьютерное моделирование, а именно аналитическое компьютерное моделирование. Аналитическими называются модели реального объекта, использующие алгебраические, дифференциальные и другие уравнения, а также предусматривающие осуществление однозначной вычислительной процедуры, приводящей к их точному решению [2]. В качестве модели тела человека был выбран математический маятник с точкой подвеса в области голеностопных суставов. Процесс ходьбы моделировался как вибрация точки подвеса, т.к. частота колебаний подвеса велика по сравнению с частотой колебаний маятника.
Математический маятник с вибрирующей точкой подвеса впервые был исследован еще в 1908 г. А. Стефенсоном [3]. Теоретическая модель такого маятника, получившего название маятник Капицы, была построена академиком и нобелевским лауреатом П. Л. Капицей [4].
На рисунке 1 изображена графическая модель Маятника Капицы.
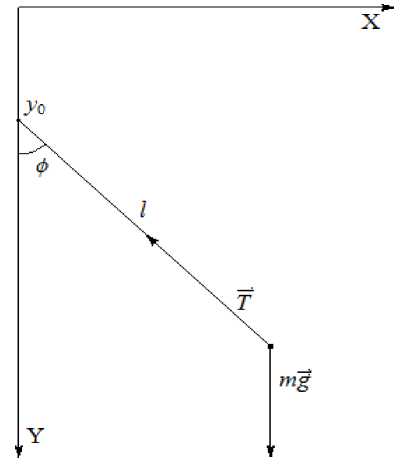
Рис 1. Математический маятник с вибрирующей точкой подвеса.
На рисунке:
y 0 - точка подвеса;
l - расстояние от ОЦМ(общего центра масс) до голеностопного сустава;
T, mg - силы, действующие а ОЦМ;
ф - отклонение от положения равновесия;
Математическая модель задается уравнением, описывающим данную систему:
—У + (a + b cos(T ))sin(ф) = 0 (1), dT т где a = g/\lto );
b = A / 1 ;
По своему смыслу a - отношение квадрата собственной частоты маятника к квадрату частоты колебаний подвеса (отношение квадрата собственной частоты маятника к темпу ходьбы), b - отношение амплитуды колебаний подвеса к длине маятника (отношение длины шага к расстоянию от голеностопного сустава до центра масс).
Результаты. Эксперименты показали, что, несмотря на простоту, выбранная модель является адекватной, т.к. наблюдается следующая зависимость. Чем меньше задаваемое значение a , то есть чем выше темп ходьбы, тем устойчивее равновесие маятника. Причем эта устойчивость достигается в верхнем положении, что соответствует выбранной изначально модели с точкой подвеса в области голеностопных суставов и материальной точкой в области центра масс человека (перевернутый маятник).
Выводы.
-
1. С помощью математического пакета была построена визуализация компьютерного эксперимента, позволяющая динамически менять параметры и воспроизводить результаты компьютерного эксперимента
-
2. Маятник Капицы может быть использован на занятиях по биомеханике, для визуализации демонстрации эффекта повышения устойчивости при увеличении темпа ходьбы.
Список литературы Компьютерное моделирование ходьбы человека
- Дубровский, В.И. Биомеханика: Учебник для средних и высших учебных заведений/В.И.Дубровский, В.Н.Федорова. -М.: Изд-во ВЛАДОС-ПРЕСС, 2003. -550 с.
- Гультяев, А.В. Визуальное моделирование в среде MATLAB: учебный курс/А. В. Гультяев. -СПб.: Питер, 2000. -432 с. 3. Stephenson, A.«On an induced stability»/A. Stephenson//Phil. Mag.-1908.
- Капица, П.Л. «Маятник с вибрирующим подвесом»/П. Л. Капица//УФН. -1951.-Вып. 1. -С. 7-20
