Компьютерное построение зоны действия шарнирно-стержневого робота манипулятора

Автор: Бабоченко Наталья Владимировна
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Научно-техническое обеспечение процессов и производств в АПК и промышленности
Статья в выпуске: 1 (5), 2015 года.
Бесплатный доступ
В статье говорится о возможности использования компьютерных программ по определению кинематических параметров шарнирно-стержневых роботов манипуляторов и программ по определению и построению зоны действия усовершенствованных шарнирно-стержневых роботов манипуляторов, предназначенных для выполнения погрузочно-разгрузочных работ. С этой целью в статье приводится описание и представлены блок-схемы реализации указанных программ, а также графическое представление зоны действия роботов манипуляторов различных конструктивных вариаций.
Шарнирно-стержневой робот манипулятор, компьютерная программа для определения кинематических параметров робота манипулятора, зона действия шарнирно-стержневого робота манипулятора, шарнирно-стержневая стрела робота манипулятора, блок-схема компьютерной программы
Короткий адрес: https://sciup.org/14770046
IDR: 14770046 | УДК: 62-236.58:621.865.8:004.9
Computer construction zone of the robot-rod pivotally rocker
In the article the possibility of using computer programs is considered. The programs allow to determine the kinematic parameters of the hinge-core robot manipulators and programs to identify and build a range of the improved hinge-core robot manipulators designed for loading and unloading. To this end, the article describes the flowchart and the implementation of these programs, as well as a graphical representation of the coverage of robot manipulators different design variations.
Текст научной статьи Компьютерное построение зоны действия шарнирно-стержневого робота манипулятора
Введение. Исследуя, работу шарнирно-стержневых роботов манипуляторов, возникла необходимость в разработке компьютерной программы для выполнения расчетов, связанных с определением не только кинематических параметров усовершенствованных шарнирностержневых роботов манипуляторов, но и построения зоны действия роботов манипуляторов [1 - 5]. Необходимо исследовать полученные модификации шарнирно-стержневых роботов манипуляторов и в ходе исследований разработать программу для построения зоны действия роботов манипуляторов.
Основная часть. Для исследования кинематических возможностей разработанных модификаций шарнирно-стержневых роботов манипуляторов разработали программу, блок-схема которой представлена на рисунке 1. Исходными данными для расчетов явились: начальная длина гидроцилиндров l1 = l2 = l0 = 300 мм; размеры b = 60 мм; с = 200 мм; r = 270 мм; ход штока S= 180 мм; полная длина цилиндров 11 = 12 = 10 + S = 480 мм. Варьированием размеров а и 11, 12 получены и выведены, кроме исходных данных, результаты расчёта Q, x, y, z, ф, у (углы в градусах).
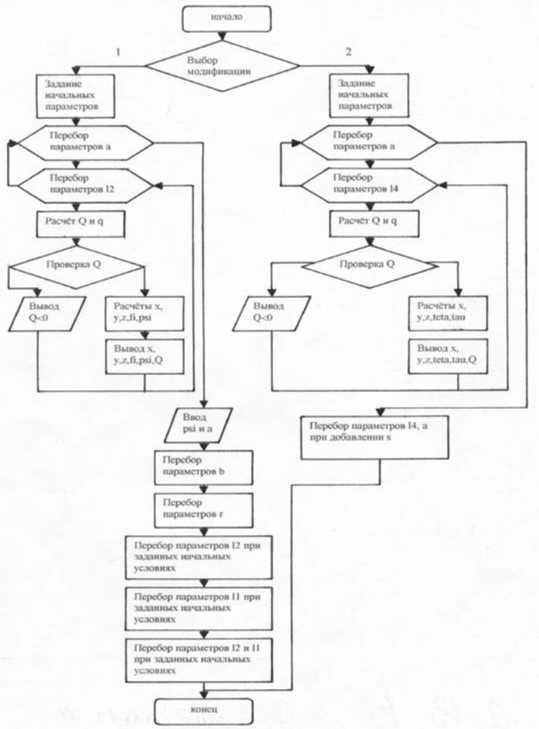
Рисунок 1 - Блок-схема реализации программы Mechanism - 3D
Зная, координаты составляющих шарнирно-стержневого соединения стрелы, возможно графическое построение, отражающее работу стрелы шарнирно-стержневого рбота манипулятора в целом. Учтем, при этом, что параметры а , в , с и 1 1 и 1 2 - величины известные и подвергаются варьированию.
Дальнейшие расчеты по определению зоны действия стрелы шарнирно-стержневого робота манипулятора привели к созданию программы Pivotal Manipulator - 3D (Стержневой манипулятор), которая позволяет определить положение в пространстве оголовка К стрелы и построить зону действия робота манипулятора, как подвижной системы. Блок-схема реализации программы Pivotal Manipulator – 3D , представлена на рисунке 2.
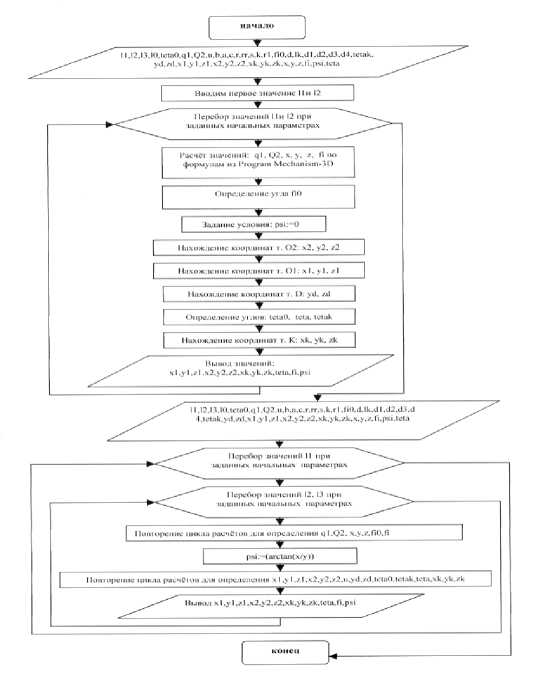
Рисунок 2 - Блок-схема реализации программы Pivotal
Manipulator – 3D
Получив результаты работы программы, построили зону действий для усовершенствованных шарнирно-стержневых роботов манипуляторов, зоны действия некоторых вариаций представлены на рисунке 3 а, б .
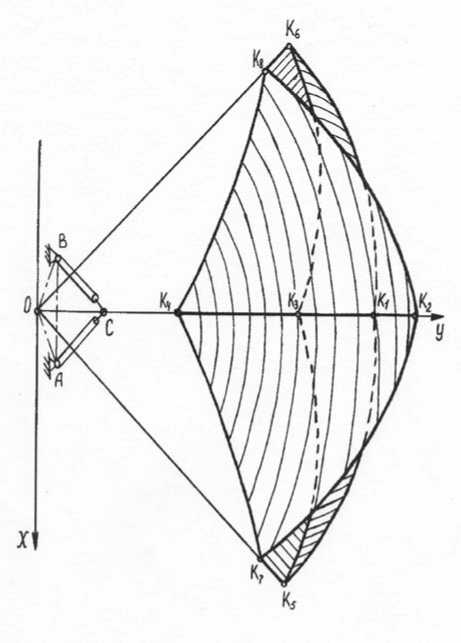
а
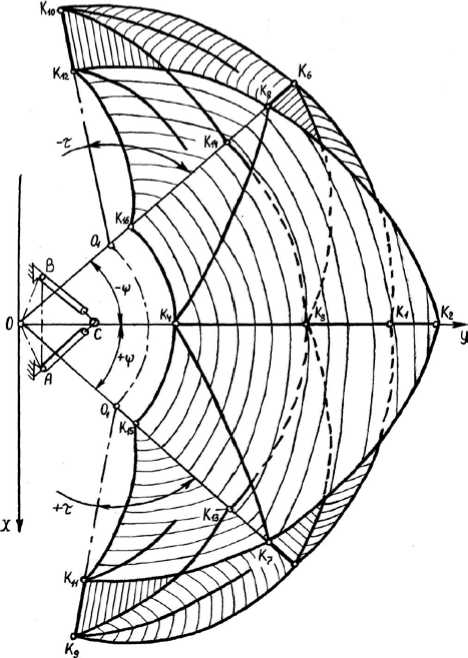
б
Рисунок 3 - Зона действия роботов манипуляторов различных конструктивных вариаций
Заключение. Используя разработанные компьютерные программы по исследованию кинематических параметров шарнирностержневых роботов манипуляторов различных конструктивных модификаций, возможно определение пространственных координат и углов поворота в вертикальной и горизонтальной плоскостях оголовка стрелы, а также благодаря созданной и работающей программе построения зоны действия шарнирно-стержневого робота манипулятора возможно графическое представление зоны действия роботов манипуляторов различной конструктивной вариации.
Список литературы Компьютерное построение зоны действия шарнирно-стержневого робота манипулятора
- Пат. №2178382 РФ, МКИ7 В66 С 23/04. Стрела грузоподьёмного средства/Пындак В.И., Кривельская Н.В. -Опубл. 2002. -8 с.
- Патент РФ №2231494 МКИ7 В66 С 23/04. Стрела грузоподьёмного средства/Пындак В.И., Кривельская Н.В. и др. Опубл. 28.06.04 г. -8 с.
- Патент РФ на полезную модель №145959 МКИ7 В66 С 23/04. Стрела грузоподьёмного средства/Бабоченко Н.В. Опубл. 23.05.14 г. -8 с.
- Бабоченко, Н.В. Модель шарнирно-стержневого манипулятора с пространственным приводным механизмом /Н.В. Бабоченко//Известия нижневолжского агроуниверситетского комплекса. -2014. -№1. -С.225 -229.
- Бабоченко Н.В. Компьютерная модель исследования кинематических параметров шарнирно-стержневых гидроманипуляторов /Н.В. Бабоченко//Южно-Сибирский научный вестник. -2014. -№2. -С.8 -10.
