КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМИ РОБОТАМИ

Автор: С. В. Ванцов, В. А. Соколов, О. В. Хомутская
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.31, 2021 года.
Бесплатный доступ
В статье рассматривается система управления промышленными роботами (ПР), в том числе прецизионными (ППР), представляющая объединение систем различных уровней иерархии управления в единую (интегрированную) систему, дается анализ структурной схемы, анализ исходной математической формулировки задачи управления и, соответственно, принципов построения алгоритмов функционирования таких систем в целом. Представленные иерархические системы управления могут быть использованы не только для стационарных и мобильных наземных роботизированных комплексов, но и для управления движением одиночных и групповых БПЛА, поскольку и в том, и в другом случае планируется перемещение органа ПР, реализующее поставленную задачу, в пространстве.
Промышленный робот (ПР), прецизионный промышленный робот (ППР), беспилотные летательные аппараты (БПЛА), манипулятор ПР, иерархическая структурная схема управления ПР, человек-оператор (Ч-О), цели управления, критерии управления, оптимизация управления
Короткий адрес: https://sciup.org/142226572
IDR: 142226572 | УДК: 62-529 | DOI: 10.18358/np-31-1-i96106
COMPREHENSIVE CONTROL SYSTEM FOR INDUSTRIAL ROBOTS
The article considers the control system for industrial robots (IR), including precision robots (РIR), representing the integration of systems of different levels of the control hierarchy into a single (integrated) system. There are the analyzes of the structural diagram and the original mathematical formulation of the control task and, accordingly, the principles of constructing algorithms for the functioning of such systems as a whole are given. It is shown that the expansion of the range of manufactured products requires continuous improvement of technological equipment, including both "mechanics" and the entire complex of control devices: electrics, electronics, pneumatics, hydraulics, optics and their possible various "complexes" (combinations). The presented hierarchical control systems can be used not only for stationary and mobile ground-based robotic systems, but also for controlling the movement of single and group UAVs, since in both cases it is necessary to move the IR unit in space to fulfill the assigned task.
Текст научной статьи КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМИ РОБОТАМИ
ВВЕДЕНИЕ роботами задачам организации движения БПЛА.
Это определяется тем, что БПЛА по сути реали-
В настоящее время разработана обширная классификация кинематических схем и конструкций промышленных роботов (ПР), в том числе прецизионных (ППР), соответственно, систем управления ПР, ППР и различных технологических процессов с их применением, эффективно разрабатываемых и внедряемых в производства самых разнообразных изделий [1–6].
Однако расширение номенклатуры производимых изделий требует непрерывного совершенствования технологического оборудования, включающего как "механику", так и весь комплекс управляющих устройств: "электрики", электроники, пневматики, гидравлики, оптики и их возможных различных "комплексирований" (комбинаций).
Совершенно очевидно, что это относится также к промышленным роботам и конкретно — к прецизионным роботам, которые становятся незаменимым технологическим оборудованием в производствах микроэлектронной техники, оптической техники и даже совершенно далекой от техники области — микрохирургии. В связи с этим развитие и углубление различных направлений анализа и синтеза конфигурации сложных систем управления такими техническими объектами, как ПР и ППР, непрерывно развивается [7–10].
Общие подходы к управлению ПР применимы в том числе и к, казалось бы, первоначально далеким от управления стационарными и мобильными зуют те же принципы построения систем управления. Разница заключается лишь в том, что в алгоритмы управления добавляется еще одна координата, связанная с их пространственным перемещением [11].
В данной статье рассматриваются вопросы анализа и синтеза обобщенных структурных схем, исходной постановки задачи и логики управления техническими объектами, конкретно относящимися к группе ППР, на основе современных подходов теорий систем: с человеком-оператором в контуре ( СЧМ), с элементами искусственного интеллекта (СИИ), автоматического управления (САУ) и автоматического регулирования (САР) [112].
АНАЛИЗ СТРУКТУРНЫХ СХЕМ
И ПРИНЦИПОВ ПОСТРОЕНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЛОЖНЫМИ ТЕХНИЧЕСКИМИ ОБЪЕКТАМИ
Классификация структурных схем систем управления
Обобщенная структурная схема системы управления принципиально любым техническим объектом (процессом) представлена на рис. 1.
Иерархическая структурная схема системы управления сложными техническими объектами (в том числе несколькими объектами) представлена рис. 2.
Внешние
Внешние
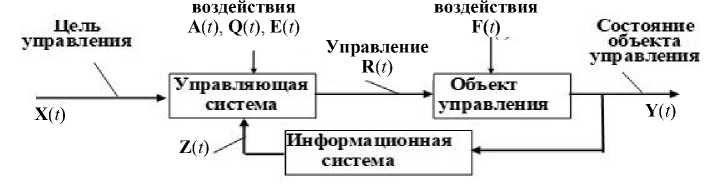
Рис. 1. Обобщенная структурная схема системы управления принципиально любым техническим объектом (процессом)
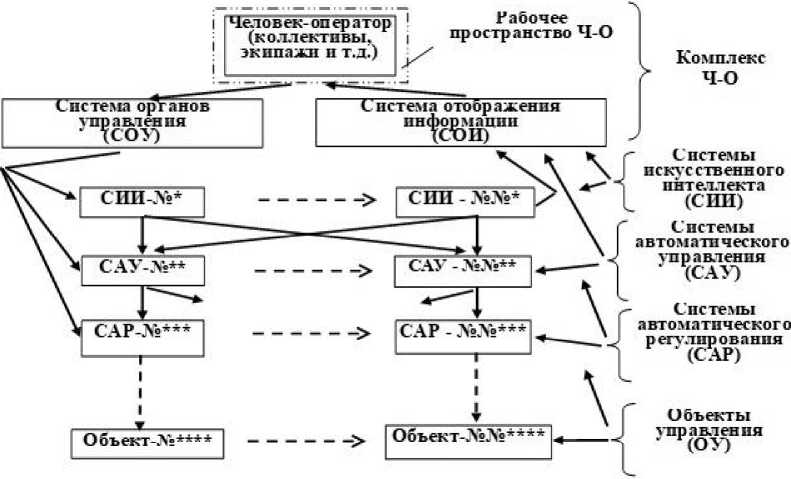
Рис. 2. Обобщенная иерархическая структурная схема системы управления сложными техническими объектами
Верхний уровень иерархии: группа устройств, с которыми взаимодействует человек-оператор (Ч-О), являющийся главным действующим звеном принципиально любой системы управления с человеком-оператором в контуре управления; в состав данной группы устройств входят:
– устройства системы отображения информации (СОИ), представляющей Ч-О всю необходимую в данный момент информацию о функционировании всей системы;
– устройства системы органов управления (СОУ), посредством которых Ч-О непосредственно сам вводит управляющие воздействия в систему.
Средние уровни иерархии:
– группы устройств, представляющие подсистемы, относящиеся к классу систем с элементами искусственного интеллекта (СИИ);
– группы устройств, представляющие подсистемы, относящиеся к классу систем автоматического управления (САУ), синтезированные и функционирующие в соответствии с традиционными методами современной теории автоматического управления (ТАУ).
Нижние уровни иерархии: группы устройств, представляющие подсистемы, относящиеся к классу систем автоматического регулирования (САР), синтезированные и функционирующие в соответствии с традиционными методами современной теории автоматического регулирования (ТАР).

Верхний уровень
Средний уровень иерархии иерархии
Нижний уровень иерархии
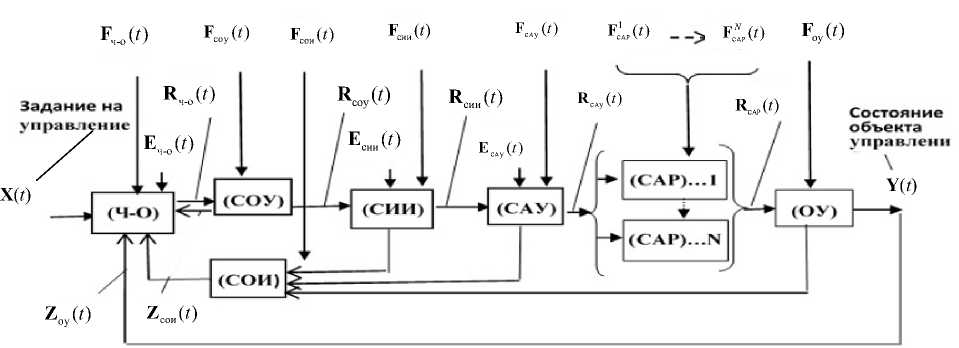
Рис. 3. Обобщенная иерархическая структурная схема системы управления одним объектом
Такое представление об иерархии управления сложными объектами позволяет использовать его не только для управления наземными роботизированными объектами и одиночными БПЛА, но и группами беспилотных летательных аппаратов [13, 134].
Обобщенная иерархическая структурная схема системы управления одним объектом представлена на рис. 3
Обобщенные векторные пространства математических моделей систем управления произвольными объектами
Структурная схема векторного пространства обобщенной системы управления представлена на рис. 1 и содержит:
X( t ), Y( t ) — соответственно, заданный и действительный векторы состояния объекта управления;
R( t ) — вектор управления;
Z( t ) — вектор наблюдения;
E( t ) — критерий качества управления;
A( t ), Q( t ), F( t ) — векторы внешних воздействий на объект управления и ограничений на управление и на ресурсы.
Традиционная (классическая) постановка задачи управления заключается в формировании вектора управления R(t), обеспечивающего достижение цели управления Y(t)=>X(t) при условии обес- печения экстремума показателя качества управления (критерия) E(t): max или min и отвечающего ограничениям A(t), Q(t), F(t), действующим в системе.
На основе структурной схемы (рис. 3) может быть сформировано векторное пространство иерархической схемы однообъектной системы.
Иерархическая структурная схема векторного пространства однообъектной системы управления:
X ( t ) — заданный вектор состояния объекта управления;
Y( t ) — вектор действительного состояния объекта управления;
Z ОУ ( t ), Z СОИ ( t ) — векторы наблюдения;
R Ч-О ( t ), R СОУ ( t ), R СИИ ( t ), R САУ ( t ),
R САР ( t ) — векторы управления;
E Ч-О ( t ), E CИИ ( t ), E САУ ( t ) — критерии качества управления;
F Ч-О ( t ), F СОУ ( t ), F СОИ ( t ), F СИИ ( t ), F САУ ( t ), F САР ( t ), F ОУ ( t ) — векторы внешних воздействий на объект управления и управляющие системы (подсистемы).
Применительно к рассматриваемой системе постановка задачи управления заключается в форми- ровании векторов управления R* (t), реализующих достижение цели управления Y(t)=>X(t) при условии обеспечения экстремумов показателей (критериев) качества управления E* (t) и отвечающих ограничениям и внешним воздействиям (помехам), действующим в системе.
В соответствии со структурной схемой, представленной на рис. 3, могут быть определены основные направления выбора методов оптимизации рассматриваемой в статье сложной иерархической системы управления ПР (ППР).
ВОЗМОЖНЫЕ МЕТОДЫ ОПТИМИЗАЦИИ ИЕРАРХИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
ППР
Иерархический уровень "человек-оператор"
На данном уровне все управляющие действия R Ч-О ( t ) выполняются человеком-оператором в соответствии:
-
• с требованиями (и указаниями) технической документации на ПР;
-
• инструкциями, разработанными для конкретного ПР и конкретного состава технологических операций, которые должны выполняться;
-
• непрерывно (неизбежно) накапливающимся опытом человека-оператора в процессе конкретной работы в составе рассматриваемой (конкретной) системы.
Иерархический уровень интеллектуальной части системы (СИИ)
В данной задаче (системе) имеет место оптимизация траекторий движения рабочего инструмента, реализуемого посредством приводов манипулятора ПР (ППР), рис. 4.
Теоретически данная задача представляет нахождение в трехмерном пространстве ПР траектории в соответствии с выбранными критериями оптимизации [145].
Возможны следующие варианты формирования движения рабочего инструмента [156–178]:
-
• на основе опыта формирования траекторий (при наличии накопленного банка траекторий) для аналогичных производственных задач;
-
• на основе формирования множества случайных точек в трехмерном пространстве координат ПР и далее: методом Монте-Карло определить путь движения от точки к точке в соответствии с выбранными критериями E CИИ ( t ), например:
-
- max скорости перемещения от точки к точке;
-
- min усилия, которое должно быть обеспечено, например, при обработке какой-либо детали с заданной чистотой поверхности;
-
• метод предварительного имитационного моделирования последовательного пошагового приближения от исходной (начальной) точки к конечной точке.
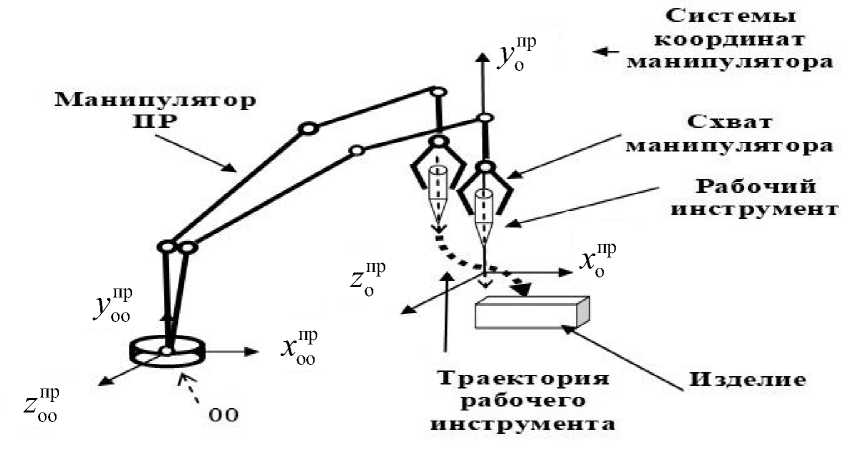
Рис. 4. Иллюстрация формирования траекторий движения
Иерархический уровень систем автоматического управления отдельными звеньями манипулятора ПР
Данная задача представляет реализацию перемещения каждого отдельного звена ПР из одной конкретной точки в другую конкретную точку в соответствии с "классической" формулировкой задачи управления (см. выше) [19–201].
В качестве критериев формирования векторов управления могут быть выбраны:
-
• max скорости, т.е. минимальное время перемещения между двумя заданными точками;
-
• max ускорения, развиваемые приводами;
-
• min отклонения (погрешности) от кратчайшего направления, соединяющего начальную и конечную точки.
Реализации задачи управления на уровнях иерархии СИИ и САУ существенно различаются, а именно:
-
- на иерархическом уровне СИИ решается многомерная задача управления сложным многокоординатным объектом, в которой интегральный вектор управления представлен комплексом "математически" связанных между собой частных векторов управления;
-
- на иерархическом уровне САУ реализуется комплекс частных (автономных) задач управления, сформулированных на предыдущем уровне (СИИ) и решаемых уже в соответствии с несвязанными между собой векторами управления.
Иерархический уровень систем регулирования (уровень САР)
На данном уровне реализуется конечный этап вывода рабочего инструмента ПР в рабочую точку [22, 23].
Задача оптимизации на этом этапе уже не ставится, т.к. системы, реализующие движение соответствующих звеньев манипулятора, уже являются составными частями ПР, а именно приводами, их технические характеристики известны (быстродействие, точность как в статике, так и в динамике).
ЗАКЛЮЧЕНИЕ
Анализ, проведенный в данной статье, показал, что задачи создания системы управления сложными многомерными техническими объектами типа ПР (и ППР) могут быть решены на основе современных подходов к проектированию разных си стем: с человеком-оператором в контуре (СЧМ), систем с элементами искусственного интеллекта (СИИ), систем автоматического управления (САУ) и систем автоматического регулирования (САР), что позволит создавать системы управле- ния производственно-техническими комплексами ПР любой сложности.
Представленные иерархические системы управления применимы не только для стационарных и мобильных наземных роботизированных комплексов, но и для управления движением одиночных и групповых БПЛА, поскольку и в том, и в другом случае решается задача целевого перемещения органа ПР в пространстве.
В статье сами объекты управления ПР (ППР) представлены без учета погрешностей их механики (манипуляторов). Однако при использовании современных подходов рассмотрения манипуляторов как "нежестких" и "многолюфтовых", а также свободно перемещающихся в пространстве механических конструкций задачу можно существенно расширить и рассмотреть управление ПР в любых режимах — как в динамических, так и в статических с требуемой точностью движения и позиционирования.
Анализ принципиальных особенностей, формирование объединенного математического аппарата и реализация совместного функционирования рассмотренных выше иерархических уровней систем управления ПР представляет самостоятельную задачу, в основе которой рассмотренные выше структурные схемы.
Работа выполнена в рамках государственного задания Министерства высшего образования и науки России, номер темы FSFF-2020-0015.
Список литературы КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМИ РОБОТАМИ
- 1. Бурдаков С.Ф., Дьяченко В.А., Тимофеев А.Н. Проектирование манипуляторов промышленных роботов и роботизированных комплексов: Учеб. пособие для студ. Вузов. М.: Высш. шк., 1986. 264 с.
- 2. Klimchik A., Magid E., Pashkevich A. Machining with Serial and Quasi-Serial Industrial Robots: Comparison Analysis and Architecture Limitations // Engineering, Computer Science 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2016.
- P. 252–259. DOI: 10.1109/IROS.2016.7759063
- 3. Horn C., Kruger J. Feasibility of Connecting Machinery and Robots to Industrial Control Services in The Cloud // 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA). 2016.
- DOI: 10.1109/ETFA.2016.7733661
- 4. Klimchik A., Ambiehl A., Garnier S., Furet B., Pashkevich A. Efficiency Evaluation of Robots in Machining Applications Using Industrial Performance Measure // Robotics and Computer-Integrated Manufacturing. 2017.
- Vol. 48. P. 12–29. DOI: 10.1016/j.rcim.2016.12.005
- 5. Dekle R. Robots and Industrial Labor: Evidence from Japan. 2020. Available at SSRN: https://ssrn.com/abstract=3670356 DOI: 10.2139/ssrn.3670356
- 6. Guyonneau R., Mercier F. IstiABot, An Open Source Mobile Robot for Education and Research // 12th International Workshop on Robot Motion and Control (RoMoCo). 2019. P. 131–136. DOI: 10.1109/RoMoCo.2019.8787363
- 7. Ванцов С.В. Роботизация производства: направления и некоторые проблемы // Электроника НТБ. 2020.
- № 7. C. 176–178.
- 8. Костров Б.В., Ручкин В.Н., Фулин В.А. Искусственный интеллект и робототехника. M.: Диалог-МИФИ, 2008.
- 224 с.
- 9. Klimchik A., Magid E., Pashkevich A. Design of Experiments for Elastostatic Calibration of Heavy Industrial Robots with Kinematic Parallelogram and Gravity Compensator // IFAC-PapersOnLine. 2016. Vol. 49, no. 12.
- P. 967–972. DOI: 10.1016/j.ifacol.2016.07.901
- 10. Villania V., Pinib F., Lealib F., Secchi C. Survey on Human – Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications // Mechatronics. 2018. Vol. 55. P. 248–266.
- 11. Wang Q., Li J., Hua Q., Zhu Y. Globally Stable Rigid Formation Control for Multi-Robot Systems // Proceedings of the Thirty-Fourth Chinese Control Conference, Hangzhou, 2015. Google Scholar, 2015. P. 7505–7510.
- 12. Теория автоматического регулирования. Книга 1. Математическое описание, анализ устойчивости и качества систем автоматического регулирования / Под ред. В.В. Солодовникова. М.: Машиностроение, 1967. 770 c.
- 13. Kima J., Croft E.A. Online Near Time-Optimal Trajectory Planning for Industrial Robots // Robotics And ComputerIntegrated Manufacturing. 2019. Vol. 58. P. 158–171.
- 14. Dudek W., Wegierek M., Karwowski J., Szynkiewicz W., Winiarski T. Task Harmonisation for A Single-Task Robot Controller // 12th International Workshop on Robot Motion and Control (RoMoCo) / K. Kozłowski, Ed. IEEE. 2019. P. 86–91.
- 15. Mohnkea Ch., Reinkobera S., Uhlmann E. Constructive Methods to Reduce Thermal Influences on The Accuracy of Industrial Robots // Procedia Manufacturing. 2019. Vol. 33. P. 19–26. DOI: 10.1016/j.promfg.2019.04.004
- 16. Martinova L.I., Sokolov S.S., Nikishechkin P.A. Tools for
- Monitoring and Parameter Visualization in Computer
- Control Systems of Industrial Robots // International
- Conference in Swarm Intelligence ICSI 2015: Advances
- in Swarm and Computational Intelligence. 2015. P. 200–
- 207. DOI: 10.1007/978-3-319-20472-7_22
- 17. Bingol M.C., Aydogmus O. Performing Predefined Tasks
- Using the Human-Robot Interaction on Speech Recognition for An Industrial Robot // Engineering Applications
- of Artificial Intelligence. 2020. Vol. 95. DOI:
- 10.1016/j.engappai.2020.103903
- 18. Filaretov V., Yukhimets D., Mursalimov E. The Universal
- Onboard Information-Control System for Mobile Robots // Procedia Engineering. 2015. Vol. 100. P. 737–745.
- DOI: 10.1016/j.proeng.2015.01.427
- 19. Bahloul A., Tliba S., Chitour Y. Dynamic Parameters
- Identification of An Industrial Robot With And Without
- Payload // Ifac-Papersonline. 2018. Vol. 51, is. 15.
- P. 443–448. DOI: 10.1016/j.ifacol.2018.09.185
- 20. Petukhov A., Steshina L., Kurasov P., Tanryverdiev I. Decision Support System for Assessment of Vocational Aptitude of Man-Machine Systems Operators // 2016 IEEE
- 8th International Conference on Intelligent Systems (IS).
- 2016. P. 672–679. DOI: 10.1109/IS.2016.7737383
- 21. Zhao Y.M., Lin Y., Xi F., Guo S. Calibration-Based Iterative Learning Control For Path Tracking of Industrial Robots // IEEE Transactions on Industrial Electronics. 2015.
- Vol. 62, no. 5. P. 2921–2929.
- DOI: 10.1109/TIE.2014.2364800
- 22. Klimchik A., Ambiehl A., Garnier S., Furet B., Pashkevich A. Comparison Study of Industrial Robots for HighSpeed Machining //Mechatronics and Robotics Engineering for Advanced and Intelligent Manufacturing. 2017.
- P. 135–149. DOI: 10.1007/978-3-319-33581-0_11
- 23. Stebulyanina M.M., Kovshovb E.E., Kuvshinnikovb V.S.
- Interval Quadratic Connected Control Systems in Industrial Robotics and Mechatronics // Procedia Computer
- Science. 2019. Vol. 150. P. 579–585. DOI:
- 10.1016/j.procs.2019.02.096
