Конфликтные управляемые процессы второго порядка

Автор: Мирзамахмудов У.А., Ходжибаева И.В.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Современные науки и образование
Статья в выпуске: 11 (78), 2020 года.
Бесплатный доступ
В данной работе рассматриваются конфликтные управляемые процессы, описывающиеся дифференциальными уравнениями второго порядка. При этом функции управления объектов должны удовлетворять геометрическим ограничениям. В предлагаемой задаче основным методом решения является применения стратегии параллельного сближения объектов. Получены новые достаточные условия разрешимости задачи преследования.
Дифференциальная игра, геометрическое ограничение, убегающий, преследователь, стратегия параллельного преследования, ускорение
Короткий адрес: https://sciup.org/140251611
IDR: 140251611 | УДК: 517.978
Second order conflict controlled processes
In this paper, we consider conflicting controlled processes described by second-order differential equations. In this case, the control functions of objects must satisfy geometric constraints. In the proposed problem, the main solution method is the application of the strategy of parallel approach of objects. New sufficient conditions for the solvability of the pursuit problem are obtained.
Текст научной статьи Конфликтные управляемые процессы второго порядка
В связи бурного развития научно-технического прогресса в мире математические методы стали важным средством в управлении сложных систем. В управлении многих экономических и технических процессов требуется учесть еще конфликтность различных сторон. В связи с этим создана новая область математики, т.е. теория конфликтных управляемых процессов описывающаяся дифференциальными и дискретными уравнениями. Более кратко эту теорию принято называть теорией динамических игр, которая слагается из двух компонент – теории дискретных и дифференциальных игр. В сегоднящних сложных рыночных отношениях при решении многих экономических и технических задач эти теории находят свои важные приложения. В настоящей работе рассматриваются движения объектов с ускорениями при геометрических ограничениях на управления. Получены новые достаточные условия для завершения игры, т.е. процесса в пользу преследующего объекта.
Пусть заданы объекты P и E с противоположной целью в пространстве R n и их движения описываются следующими дифференциальными уравнениями заданными начальными условиями и ограничениями на управления
P : x = u , x - kx 0 = 0 , | u | < а , (1)
E : y = v , У 1 — кУ о = 0 , V < в , (2)
где x, y, u, v g Rn; x - положение объекта P в пространстве Rn, x0 = x(0), xx = x(0) - его начальное положение и скорость соответственно при t = 0; и - параметр ускорения преследователя и оно выбирается как измеримая функция и : [ 0,»)^ Rn по отношению к времени t. Обозначим множество всех измеримых функций и (•), удовлетворяющих условию |и| < а, через U. у -положение объекта E в пространстве Rn, y0 = у(0), у = у(0) - его начальное положение и скорость соответственно в t = 0; v - контролируемое ускорение убегающего, v: [0, »)^ Rn и оно тоже выбирается как функция времени по отношению к t . Обозначим множество всех измеримых функций v(•), удовлетворяющих условию |v| < в, через V.
Определение 1. Для тройки (x0, x, и (•)), и (•) g U, следующее решение уравнения (1)
ts x (t) = x0 + x^ +
J j и ( r ) d r ds
0 0
называется траекторией преследователя на отрезке t > 0.
Определение 2. Для тройки ( y 0, y1 , v ( • )), v ( • ) е V , следующее решение уравнения (2)
ts
У (t) = У о + yit + J J v (т) dr ds о о называется траекторией убегающего на отрезке t > 0.
Определение 3. Задача преследования для дифференциальной игры (1) -(2) называется решённой, если существует такая управляющая функция преследователя и *(•) е U для любой управляющей функции убегающего
v(•) е V и в некоторый конечный момент времени t выполняется равенство x (t *) = У (t *)
Определение 4. Для задачи (1) - (2) время T называется гарантированным временем преследования, если оно равно верхней границе всех конечных значений времени преследования t *, удовлетворяющих равенству (3).
Определение 5. Для дифференциальной игры (1) - (2) следующая функция называется П-стратегией преследователя ([1] - [2]):
и ( v ) = v - Л ( v ) ^ о (4)
2 . _ 2 2
где ^ ( v , ^ 0 ) = ( v , ^ 0 ) + y( v , ^ o) + а |v ’ ^ 0 = z о/| z o|
( v , ^ ) - скалярное произведение векторов v и ^ в пространстве R n .
Свойство 1. Если а > в , то функция Л ( v , ^ ) непрерывна, неотрицательна и определена для всех таких v , что удовлетворяет неравенству I v l ^ в .
Свойство 2. Если а > в, то для функции Л(v,^) справедливо неравенство:
а -| v | < Л ( v , ^ ) < а + | v|
Теорема. Если для дифференциальной игры второго порядка (1) - (2) выполняется одно из следующих условий, 1. а = в и k < 0; или 2. а > в и к g R , то с использованием стратегии (4) гарантированное время преследования будет следующим:
I ^ о I k + v | 2 о f к 2 + 2| z 0 |( а - в ) ) / ( а - в ), если к ^ 0 и а > в, - 1 / к , если к < 0 и а = в , 7 2| z о| /( а - в ) , если к = 0 и а > в .
Доказательство. Предположим, что преследователь выбирает стратегию в форме (4), когда убегающий выбирает любую управляющую функцию v ( • ) g V . Тогда согласно уравнениям (1) - (2) имеем следующее уравнение Каратеодори:
z = -Л ( v ( t ) ) ^ 0, z ( 0 ) - кг (0) = 0 ,
Отсюда при заданных начальных условиях будет найдено следующее решение ts
z ( t ) = z 0( кt + 1) - ^ || Л ( v ( т ), ^ ) d r ds
0 0
или
I z ( t )| = I z 0 | ( kt + 1) - jj ( ( v ( т ), ^ 0 ) + V ( v ( т Ш2 + а 2 - v ( т )Г ) d T ds •
Согласно свойствам 1 -2 сформируем следующие неравенства
I z ( t )| < | z 01 ( kt + 1) - fj ( a - v ( t )|) d r ds ^
0 0
|z ( t )| < | z 01( kt + 1) + 1 2( в — a ) / 2 .
Обозначим
f ( t , a , k , a , в ) = a ( kt + 1 ) —— ( a — в ) , a = | z 01.
-
1. Пусть будет a = ft .
-
1.1. Если k > 0, то f ( t , a , k, a , в ) = a ( kt + 1 ) и это возрастающая функция (Рис-1)
-
ад

о t
(Рис-1)
-
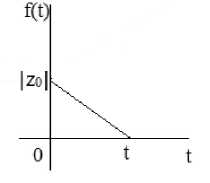
1.2. Если k = 0, то f ( t , a , k , a , в ) = |z 0| - постоянная функция (Рис-2)
ад
I zo I----------------------- о t
(Рис-2)
* 1
-
1.3. Если k < 0 , то функция (5) убывает и в момент времени t = — k
-
2. Пусть будет а > в .
-
2.1. Если k > 0 , то функция (5) в момент времени
-
-
2.2. Если к < 0, то функция (5) монотонно убывает, и эта функция обращается в ноль со временем T , как в случае 2.1 (Рис-5).
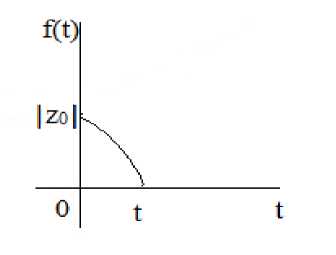
(Рис-5)
2.3. Если k = 0, то
f ( t , a , k , a , в ) =
a - — (a — в ) и время преследования
равно T o =
2 z о
a — в
равна нулю (Рис-3)
(Рис-3)
T = (| z0|k + ^| z 012 к 2 + 2 | z 0 |( а - в ) ) / (а - в) равна нулю (Рис-4)
(Рис-4)
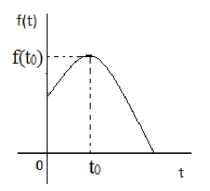
Максимальное значение функции (5) в момент t0 = |z0|k / (а — в),будет равно следующему:
f ( t о ) = ( 2| z о| ( а — в ) +| z о|2 к 2) /2( а — в ) .
Следовательно, соотношение (3) верно в какой-то момент t * на основании неравенства | z ( t )| < | z 01 ( kt + 1) + 1 2 ( в — a ) / 2 и свойства (5), и определяется, что соотношение t * < T является правильным, т.е. задача преследования решена, что завершает доказательство теоремы.
Список литературы Конфликтные управляемые процессы второго порядка
- Azamov A. On the quality problem for simple pursuit games with constraint // Serdica Bulgariacae math. Publ. - Sofia, 1986. - Vol. 12. - № 1. - P. 38-43.
- Azamov A.A., Samatov B.T. The П-Strategy: Analogies and Applications // The Fourth International Conference Game Theory and Management, June 28-30, 2010, St. Petersburg, Russia, Collected papers. - Р. 33-47.
- Isaacs R. Differential Games. - New York: John &Wiley, 1971. - 480 p.
- Kuchkarov A.Sh., Ibragimov G.I. An Analogue of the P-strategy and Pursuit and Evasion Differential Games with many Pursuers on a Surface // Game Theory and Management, St.Petersburg, Graduate School of Management SPbU. - St. Petersburg, 2010. - Vol.3. - P. 247-256.
- Azamov A.A., Kuchkarov A.Sh., Samatov B.T. The Relation between Problems of Pursuit, Controllability and Stability in the Large in Linear Systems with Different Types of Constraints // J.Appl.Maths and Mechs. - Elsevier. - Netherlands, 2007. - Vol. 71. - № 2. - P. 229-233.
- Samatov B.T. The Game with "a Survival Zone" in the case integral-geometric constraints on the controls of the Pursuer // Узбекский математический журнал. - Ташкент, 2012. - № 7. - С. 64-72.
- Samatov B.T. On a Pursuit-Evasion Problem under a Linear Change of the Pursuer Resource // Siberian Advances in Mathematics. - Allerton Press, Inc.Springer. - New York, 2013. - Vol. 23. - № 4. - P. 294-302.
- Samatov B.T. The Pursuit- Evasion Problem under Integral-Geometric constraints on Pursuer controls // Automation and Remote Control. - Pleiades Publishing, Ltd. - New York, 2013. - Vol. 74. - №7. - P. 1072-1081.
- Samatov B.T. The Resolving Functions Method for the Pursuit Problem with Integral Constraints on Controls // Journal of Automation and Information Sciences. - Begell House, Inc. (USA). 2013. - Vol. 45,№8. - P. 41-58.
- Samatov B.T. The П-strategy in a differential game with linear control constraints // J.Appl.Maths and Mechs. - Elsevier. - Netherlands, 2014. - Vol. 78. - № 3. - P. 258-263.
