Конструктивные алгоритмы автоматизированного решения позиционных задач

Автор: Панчук К.Л., Крысова И.В., Любчинов Е.В., Мясоедова Т.М.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Прикладные онтологии проектирования
Статья в выпуске: 4 (54) т.14, 2024 года.
Бесплатный доступ
Изложены теоретические основы предлагаемого подхода к автоматизированному решению позиционных задач на пересечение геометрических объектов в евклидовом пространстве. Создан понятийный аппарат, основанный на понятиях и определениях, относящихся к известному в теории множеств отношению эквивалентности. Понятийный аппарат включает: отношение эквивалентности, вводимое на множестве геометрических объектов евклидова пространства; размерность и факторизацию множества объектов путём представления его как множества классов эквивалентности; проецирующее фактор-множество пространства. Приведено обоснование теоретико-множественного представления операции проецирования и разработаны на основе этого представления конструктивные алгоритмы решения позиционных задач на пересечение геометрических объектов пространства. Конструктивные алгоритмы реализованы в программной среде САПР КОМПАС-3D. Теоретические основы и анализ функционирования алгоритмов позволили определить понятия «геометрическое моделирование» и «3D-моделирование». Предлагаемый подход к автоматизированному решению позиционных задач по существу представляет собой 3D-моделирование этих решений, которое основано на создании виртуальной модели определённого решения. В работе приведены примеры автоматизированного 3D-решения позиционных задач на пересечение с описанием алгоритмов их конструктивных решений, а также примеры практического использования алгоритмов.
Автоматизированное проектирование, позиционные задачи, отношение эквивалентности, конструктивные алгоритмы, 3d-моделирование
Короткий адрес: https://sciup.org/170207429
IDR: 170207429 | УДК: 514.181.2 | DOI: 10.18287/2223-9537-2024-14-4-518-530
Constructive algorithms for automated solutions to positional problems
This paper presents the theoretical foundations for an approach to automated solutions of positional problems involving intersections of geometric objects in Euclidean space. A conceptual framework is developed based on concepts and definitions related to the equivalence relation known in set theory. This framework includes: an equivalence relation defined on the set of geometric objects in Euclidean space; the dimension and factorization of the object set, represented as a collection of equivalence classes; and the projected factor set of space. A set-theoretic basis for representing the projection operation is provided, enabling the development of constructive algorithms to solve positional problems involving intersections of spatial geometric objects. These algorithms have been implemented within the KOMPAS-3D CAD environment. The theoretical foundations and analysis of the algorithm functionality establish definitions for "geometric modeling" and "3D modeling." The proposed approach to automating positional problem solutions essentially constitutes a 3D model of these solutions through the creation of a virtual model. The paper includes examples of automated 3D solutions to intersection problems, descriptions of the algorithms used in their design, and examples of practical applications of these algorithms.
Текст научной статьи Конструктивные алгоритмы автоматизированного решения позиционных задач
Известны различные способы решения позиционных задач на взаимное пересечение линий, плоскостей и поверхностей в евклидовом пространстве E 3 . Каждый способ не является универсальным и применяется для пересекающихся геометрических объектов определённого класса и расположения [1-3]. Например, для двух поверхностей вращения с параллельными осями применяется способ секущих плоскостей, который в частных случаях может применяться и для поверхностей вращения с пересекающимися осями. Способ концентрических сфер применяется для двух поверхностей вращения с пересекающимися осями, а способ эксцентрических сфер – для поверхностей вращения и циклической.
Каждому из известных способов даётся упрощённое объяснение, основанное на представлениях о геометрической форме пересекающихся объектов и свойствах этой формы. Применяемые способы реализуются на проекционном чертеже, в т.ч. системами автоматизированного проектирования (САПР) [4-6]. Проекционная реализация сопровождается решениями дополнительных задач, например, определения видимости линии пересечения и пересекающихся поверхностей, поиска опорных точек линии пересечения и других задач. Суще- ствующие способы выполнения проекционного чертежа при явном функциональном различии инструментов, реализующих эти способы, основаны на одних и тех же проекционных алгоритмах [7]. Без мыслительно-образного взаимодействия между выполняемыми на чертеже построениями и соответствующими им в пространстве геометрическими формами и конструкциями невозможно получить верное решение позиционных и других геометрических задач.
Целью настоящей работы является выведение конструктивных алгоритмов решений позиционных задач на автоматизированный уровень их применения в пространстве E 3 . Алгоритм конструктивного решения геометрической задачи (конструктивный алгоритм) часто используется в геометрических исследованиях и является основным инструментом решения геометрических задач на плоскости и в пространстве [8-10].
Для достижения цели работы необходимо решить две задачи.
-
■ Разработать теорию конструктивных алгоритмов решения позиционных задач на пересечение в пространстве E 3 , в рамках которой известные способы решения этих задач получат системное обоснование с единых позиций.
-
■ Показать возможность практической 3D-реализации предложенных конструктивных алгоритмов на основе использования отечественных САПР, в частности КОМПАС-3D.
1 Теория конструктивных алгоритмов
Между элементами α 1 и α 2 множества А в пространстве E 3 может быть установлено отношение эквивалентности ∆: α 1 ∆ α 2 , если для всяких элементов α 1 , α 2 , α 3 множества A выполняются следующие условия [11, 12]:
-
■ рефлексивность: а Д а , V а е A,
-
■ симметричность: а 1 Д а 2 = а 2 Д а i , V ( а i , а 2 ) е A,
-
■ транзитивность: ( а 1 Д а 2 , а 2 Д а 3 ) ^ а 1 Д а 3 , V ( а 1 , а 2 , а 3 ) е A.
Подмножество элементов, соответствующих элементу α в отношении эквивалентности ∆ называется классом эквивалентности. Характеристическое свойство отношения эквивалентности порождает разбиение всего множества элементов на классы эквивалентности.
Пусть ∆ есть отношение эквивалентности на множестве элементов A . Для каждого элемента а е A его класс эквивалентности K представляет собой множество всех элементов в е A , для которых выполняется а Д в • Пусть K 1 n K 2 = в • Тогда имеет место а 1 Д в и а 2 Д в , откуда следует, что в Д а 2 (по симметричности), а 1 Д а 2 (по транзитивности) и а 2 Д а 1 (по симметричности). Поэтому для каждого в из эквивалентности а 1 Д в следует а 2 Д в и наоборот. Очевидно, что классы K 1 и K 2 совпадают. Каждый элемент а е A , в силу рефлексивности, принадлежит определяемому им классу эквивалентности, и всё множество элементов A может быть разбито на непересекающиеся классы.
Примерами отношения эквивалентности служат отношения подобия и конгруэнтности, параллельность в плоскости E 2 и в пространстве E 3 . Перпендикулярность не является отношением эквивалентности. Представление некоторого множества в виде непустых и попарно непересекающихся классов { K i } i е I называется разбиением множества. Множество классов эквивалентности называется фактор-множеством данного множества элементов по отношению эквивалентности, а операция разбиения множества на классы эквивалентности называется факторизацией.
Пусть Q есть множество элементов в пространстве Еп такое, что каждому элементу а с Qn соответствует набор переменных параметров (α1, α2, …, αn), определяющих его положение во множестве Qn. Если αn = t (действительное число), то в Qn выделяется некоторое подмножество Φn-1, каждый элемент которого определяется набором из n-1 параметров. Если для двух элементов а с Q и в с Q с соответствующими наборами а (а 1, а 2, ..., ап) и в (в 1, в 2, •••, βn) выполняется условие αn = βn = t, то оба элемента α и β принадлежат некоторому подмно- жеству Фп- 1. Введённое здесь условие инцидентности есть отношение эквивалентности А , а подмножество Фп'1 - (п- 1)-мерный класс эквивалентности.
Например, в пространстве E 3 каждая точка определяется тройкой координат ( x, y, z ). Если z = t , то в E 3 образуется плоскость, которой принадлежат все точки ( x, y, t ). Если давать параметру t некоторое приращение At : t + At = 1 1 ,1 1 + At = 1 2 , ..., tn- 1 + At = tn , получается дискретное множество плоскостей, перпендикулярных оси z . Никакие две плоскости этого множества не пересекаются, а непрерывное объединение всех плоскостей при непрерывном изменении параметра t заполняет всё множество Q” . Очевидно, плоскость z = t есть класс эквивалентности, а всё множество таких классов представляет собой фактор-множество по отношению к E 3.
Можно сделать следующее обобщение. При фиксировании двух параметров из набора а ( а 1 , а 2 , ..., ап ) во множестве Q выделяется подмножество Ф п 2 . При непрерывном изменении значений этих двух параметров, получается непрерывное двухпараметрическое множество ( п- 2)-мерных подмножеств, представляющих собой классы эквивалентности, попарно непересекающиеся и непрерывно заполняющие всё множество Q . Обобщение рассуждения приводит к выводу, что при фиксировании m параметров в наборе а ( а 1 , а 2 , ..., ап ), m < п , исходное множество Q разбивается на m -параметрическое множество ( п-m )-мерных классов эквивалентности, в каждом из которых содержится ( n-m ) параметрическое множество элементов из множества Q . Очевидно тождество m + ( п-m ) = п . Пусть l = ( п-m ). Тогда разбиение множества Q на классы эквивалентности имеет вид: Фт ( с Q , m + l = п , где Фт ( есть m -мерное фактор-множество, состоящее из l -мерных классов эквивалентности ф1 . Таким образом, можно записать в символьном виде:
Ф® с Q , Ф m((l = и у® , m + l = п , (1)
m где и у® - это непрерывное m-параметрическое объединение l-мерных классов эквивалент-m ности у®. Очевидно, операция факторизации множества Qn в общем случае не единственна.
Представление инцидентности как отношения эквивалентности позволяет перейти к представлению операции проецирования в пространстве Е п , лентности.
тоже как отношения эквива-
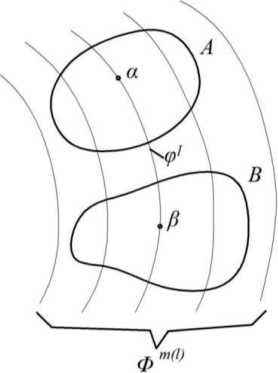
Рисунок 1 - Представление операции проецирования как отношения эквивалентности
В пространстве Е п между множествами A и B могут быть установлены различные соответствия, если сопоставить элементу а е A один или множество элементов в е B (см. рисунок 1). Сопоставление может быть выполнено конструктивно, т.е. путём соответствующих построений. Пусть пространство Е п разбито на классы эквивалентности согласно схеме на рисунке 1. Для этого образ в и прообраз а в конструктивном соответствии должны принадлежать одному классу эквивалентности у1 , который называется проецирующим классом. При этом под отношением эквивалентности А е понимается инцидентность элементов а и в одному проецирующему классу у1 [13]. При разбиении пространства Еп на проецирующие классы необходимо выполнение некоторых условий: ■ через каждый прообраз а проходит один класс эквивалентности у1 ;
-
■ элементы-прообразы, через которые проходит множество
классов у1 , либо не существуют, либо образуют некоторое множество ^ , k = 0, 1, 2, ..., к < п , которое исключается из операции проецирования (множество ^ k называется центром ( k = 0) или ядром ( k > 0) проецирования).
Фактор-множествами пространства Е 3 по отношению эквивалентности А е , представляющими собой инцидентность прообраза в и образа а одному проецирующему классу, могут быть следующие.
-
■ E 3 ^ Ф 2(1) , Ф 2(1) c E 3 , Ф 2(1) = и ф1 - двухпараметрическое множество линий. Например,
связка прямых с собственным или несобственным центром - ядром проецирования, либо конгруэнция прямых - множество прямых, пересекающих две заданные линии (фокальные линии конгруэнции).
-
■ E 3^ Ф 1(2), Ф ^c E 3 , Ф = и ф 2 - однопараметрическое множество плоскостей или по
верхностей.
2 Алгоритмы конструктивного определения множества пересечения
Известно, что если два множества A m и B q в пространстве Еп пересекаются, то размерность p множества их пересечения определяется формулой [2]: p = m + q - n . В пространстве E 3 возможны следующие варианты пересечений.
-
■ m = q = 2, p = 1 (линия, либо конечное число линий).
-
■ m = 1, q = 2 или m = 2, q = 1, следовательно, p = 0 (точка или конечное число точек).
Применение для пересекающихся множеств A 2 и B 2 пространства E 3 операции разбиения на классы эквивалентности имеет вид:
A 2^ Ф К1), Ф id) c A 2, Ф 1(1) = и ф\ B 2 = V 1(1), V ^ c B 2, V ад = и р 1
В таком случае для их множества пересечения можно записать:
Ф Ki) n v 1(1) = (и ф 3) п (и р 1). (2)
Если предположить, что существует множество пересечения (2), то оно будет представлять собой объединение попарных пересечений классов эквивалентности ф 1 и р 1 :
ф 1 п р 1 = c 0 ^ (и ф ') п (и р ') = и c 0 = C ^0) - однопараметрическое множество точек, т.е. линия.
Из формулы размерности множества пересечения p = m + q - n , применённой для классов эквивалентности ф 1 и р ', получается, что при p = 0 и m = q = 1 элемент пересечения c 0 может быть получен при условии, что n = 2. Это значит, что классы ф 1 и р 1 должны принадлежать одному двумерному множеству X 2 , т.е. плоскости или поверхности. Таким образом:
(и ф 1 ) п (и р 1 )= и ( ф1 п р 1 )= и С 0, где c 0 е X 2 , т.к. ф 1 c X 2 , р 1 c X 2 и C 1(0)= и c 0c и X 2 = Ф 1(2) c E 3 , где Ф ^2) - непрерывное однопараметрическое множество плоскостей (или поверхностей) представляет собой фактор-множество пространства E 3 .
Исходя из изложенного, можно предложить следующий алгоритм конструктивного определения множества пересечения C 1(0) = A 2 п B 2 .
Алгоритм 1 :
-
1) Ф 1(2) c E 3 , Ф 1(2) = и X 2 ^ { X 2} = { X i 2, X 2 2, „., X n 2}
-
2) X i 2 п A 2 = ф,1
-
3) X i 2 п B 2 = р,1
-
4) ф , 1 п р , 1 = c i 0 - точка или конечное множество точек f 0 0 0 0> , 0 _ .^1(0)
-
• { c , } = { c i , c 2 , „., c k } ^ и c = C 1 7
Пункт 1 алгоритма 1 означает получение дискретного множества { X , 2} плоскостей или поверхностей, а запись в итоговом пункте { c 1 0, c2 0, „., c k 0} ^ и c 0 означает преобразование дискретного множества точек { c , 0} в непрерывное множество точек и c 0 = C 1*0), т.е. в искомую линию пересечения A 2 п B 2 = C 1(0) на основе интерполяции множества { c , 0}.
Использование классов эквивалентности ф 1 с A 2 и у 1 с B 2 простейшей геометрической формы имеет важное практическое значение при построении линии пересечения поверхностей A 2 и B 2 в пространстве E 3 . Поэтому формирование фактор-множества Ф ^2) с E 3 целесообразно выполнить следующим образом.
-
1) Одно из пересекающихся множеств A 2 или B2 представляется в виде его фактормножества Ф 1(1), например: A 2^ Ф 1(1), Ф 1(1) с A 2 , Ф 1(1) = у ф \
-
2) Полученное множество Ф 1(1) расширяется на всё пространство E 3 для получения фактормножества пространства: у ф '^ у ф 1 = Ф 2(1) , Ф 2(1) с E 3 .
Геометрическая схема формирования фактор-множества Ф 2(1) с E 3 и последующие операции, направленные на конструктивное определение линии пересечения A 2 n B 2, могут быть представлены в виде алгоритма 2.
Алгоритм 2 (см. рисунок 2).
-
1) A 2^ Ф К1), Ф 1(1) с A 2, Ф 1(1) = у ф1
-
2) у ф 1^ у ф 1 = Ф 2(1), Ф 2(1) с E 3
-
3) B 2^ ^ 1(1) , ^ 1(1) с B 2 , ^ 1(1) = у у1
-
4) Вводится плоскость отображения (проекции) П
-
5) A 2^ A n 1 = С П 1(0) — след проецирующей поверхности A 2 и одновременно ф -проекция искомой линии пересечения C 1(0)
-
6) у у 1 ^ у уП1
-
7) С п ° = A n 1 n у п1
-
8) c n ^ C 0 , c0 е у1
-
• { С п °} = { С п 1 °, С п 2 о, ---, cnk о} ^интерполяция у С п °= Cn1(0)
-
• { с 0 } = { c 1 0, с2 о, . ., ck 0} ^интерполяция у c 0 = C 1(0) - решение задачи
Если в условии задачи (алгоритм 2) по определению линии пересечения A 2 n B 2 заменить поверхность B 2 на линию B \ то получится задача нахождения пересечения A 2 n B 1 = С 0 (точка или конечное число точек). Для её решения можно использовать алгоритм 2 с заменой B 2^ B \ приводящей к некоторым сокращениям и упрощениям операторов этого алгоритма. Конструктивная интерпретация изменённого алгоритма представлена на рисунке 3.
Неоднозначность в выборе фактор-множества Ф 2(1) с E 3 позволяет получать, с учётом конкретных форм пересекающихся поверхностей и линий, различные решения одной и той же позиционной задачи на пересечение. Например, решение предыдущей задачи A 2 n B 1 = С0 может быть выполнено, если в качестве проецирующего фактор-множества X 2(1) = у о 1,
X 2(1) с E 3 рассмотреть двухпараметрическое множество у о 1 линии о 1 , а плоскость П отображения заменить на саму поверхность A 2 . Тогда однопараметрическим множеством проецирующих линий о 1 , образующих проецирующую поверхность у о 1 при пересечении с линией B \ последняя отображается в свой образ BA \ и точка С 0 = B 1 n BA 1 (или конечное множество таких точек) будет искомым решением рассматриваемой задачи (см. рисунок 4).
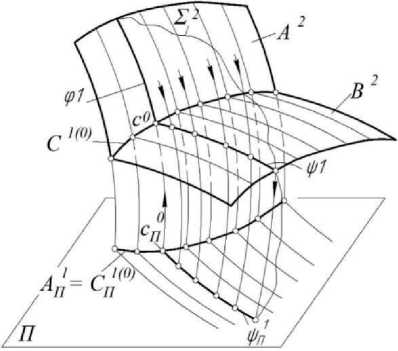
Рисунок 2 - Конструктивная интерпретация алгоритма 2
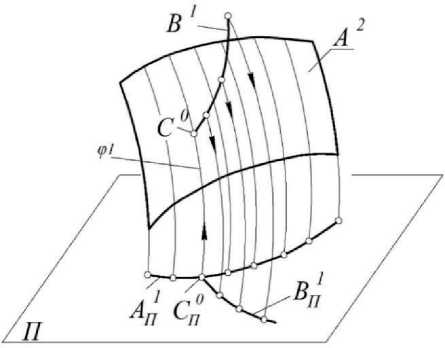
Рисунок 3 - Конструктивная интерпретация изменённого алгоритма 2
3 Реализация конструктивных алгоритмов
Реализацию автоматизированного решения позиционных задач на пересечение геометрических объектов в пространстве E 3 можно показать на примерах.
В задачах с пересекающимися объектами часто используются поверхности различных геометрических форм. Для аналитического и компьютерного моделирования поверхностей на этапе подготовки исходных данных в решении позиционных задач используются различные методы их формообразования, например, криволинейного проецирования [14].
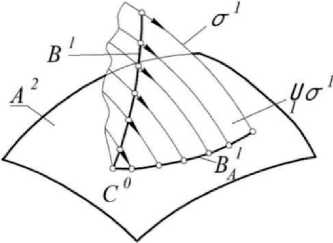
Рисунок 4 - Конструктивная интерпре- тация алгоритма решения задачи
A 2 ^ B 1 на основе фактор-множества
£ 'ЭД = U а 1^ U а 1
2 1
Пример 1. В декартовой системе координат O xyz задана плоскость (1, 2, 3) координатами трёх точек 1, 2 и 3 (см. рисунок 5). Задана также прямая линия (9,10) координатами точек 9 и 10. Требуется определить точку пересечения прямой и плоскости.
Решение задачи выполнено в САПР КОМПАС-3В, используя соответствующий функционал системы. Поэтапное решение задачи представлено в дереве построений и выполняется в следующей последовательности.
-
1) проводится ось (прямая) через точки 9 и 10 и строится плоскость (1,2,3);
-
2) в соответствии с алгоритмом, конструктивная интерпретация которого представлена на
рисунке 4, задаётся направление отображения прямой (9,10) на плоскость отображения (1,2,3); направление задаётся прямой a , которая принадлежит конгруэнции параллельных прямых, представляющих собой проецирующие классы эквивалентности и образующих фактор-множество о a1 = z 2(1) с E 3 ;
-
3) прямая (9,10) отображается проецирующими классами эквивалентности в прямую (20,21) на плоскости отображения (1,2,3);
-
4) точка 22 является решением задачи: 22 = (9,10) п (20,21).
т © И"Деталь (Тел-0)
► J— • Начало координат
-
• Точка:1
-
• Точка:2
-
* Точка:3
-
• Точка:9
-
* Точка:10
/ Ось через две точки:8 (9,10)
й^ Плоскость через три точки: 1 (1,2,3) /Ось через точку по направлению:3 а /Ось через точку по направлению:5Ь
-
• ПГТочка:20
/Ось через точку по направлению^ с 9 ПГТочка:21
/Ось через две точки: 17 (20,21)
-
• ПГТочка:22
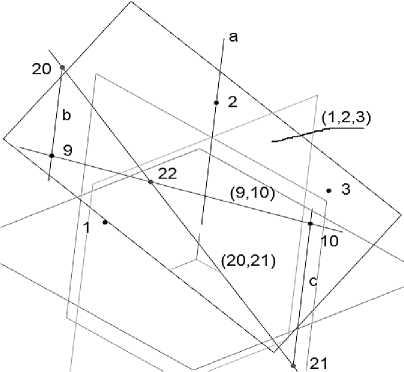
Рисунок 5 - Дерево построений (слева) и решение задачи (справа) в примере 1
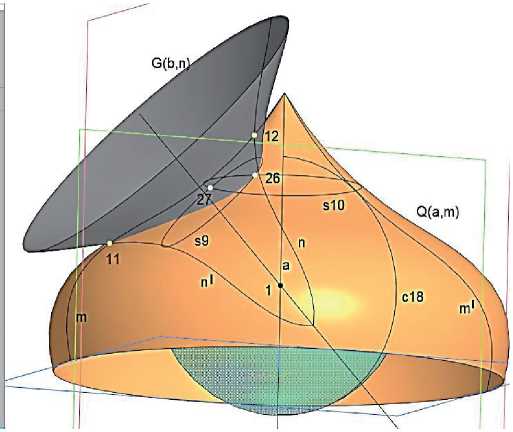
Пример 2 . Требуется построить линию пересечения двух поверхностей вращения с пересекающимися осями. В определитель первой поверхности вращения Q ( a , m ) входит её ось а и полумеридиан m , позволяющие перейти к формированию поверхности (см. дерево построений на рисунке 6).
[^Деталь (Тел-0)
-
► J— • Начало координат
/Ось на пересечении двух плоскостей:2 а
- ЬНЭскиз:1 m
О Поверхность вращения:1 Q(a т)___ ^ Линия очерка:1 (т,гп')
-
9 Точка:1
/Ось через точку по направлению:1 Ь
Ь^ЭскизЗ п
О Поверхность вращения:3 G(b,n)
^ Линия очерка:3 (п.П1)
-
9 Точка:11
* Точка:12
ЬЭскиз:18 с18
О Поверхность вращения:7 Сфера (а,с18)
$ Кривая пересечения^ s9
^Кривая пересечения: 10 s1 О
* Точка:26
• Точка:27
Рисунок 6 - 3П-моделирование линии пересечения поверхностей вращения (этап 1: формирование исходных данных)
Для второй поверхности вращения G (b, n) её формирование выполнено вращением полумеридиана n относительно оси b. Координатной плоскости ZX принадлежат составные очерки (m,m‘) и (n,n') исходных поверхностей Q и G соответственно. Точки пересечения этих очерков (m, m') n (n, n') = 11,12 (две точки) служат опорными точками искомой линии пересечения исходных поверхностей. На рисунке 6 приведена сфера (а, c 18), построенная как поверхность вращения по оси а и полуокружности c 18 с центром на оси а. Сфера (а, c 18) пересекает поверхности G и Q по окружностям s9 и s 10 соответственно, общие точки 26 и 27 которых принадлежат искомой линии пересечения Q∩G . На рисунке 7 в дереве построений приведена последовательность построений промежуточных точек линии пересечения и их визуализация на 3Э-модели на основе использования способа секущих концентрических сфер, который соответствует алгоритму 2. Интерполяция полученного пространственного дискретного ряда даёт искомую линию пересечения (сплайн 4 в дереве построений) исходных поверхностей вращения Q и G.
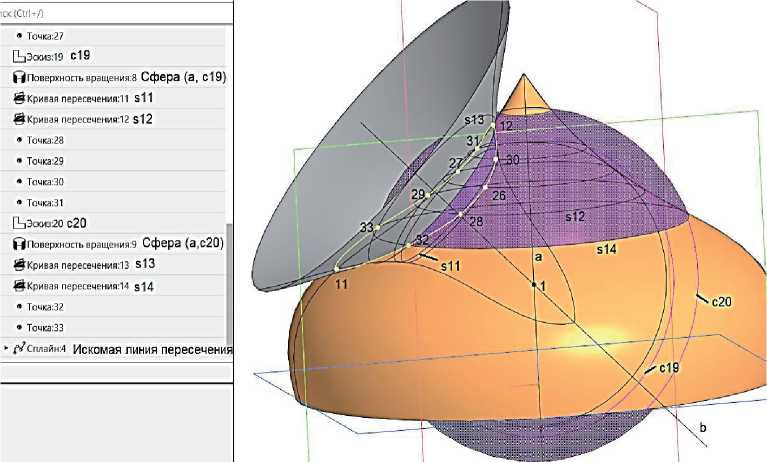
Рисунок 7 - 3П-моделирование линии пересечения поверхностей вращения (этап 2: формирование дискретного массива промежуточных точек и линии пересечения)
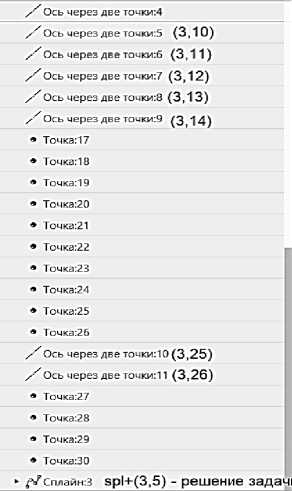
Пример 3 . Рассматривается задача построения линии пересечения двух квадрик: цилиндрической поверхности вращения и наклонной круговой конической поверхности, у которых имеется одна общая образующая прямая a - компонента линии их пересечения (см. рисунок 8). Цилиндрическая поверхность G ( n,a ) определена окружностью основания n , направляющей прямой a - общей образующей пересекающихся поверхностей. Коническая поверхность Q (3, m ) определена вершиной в точке 3 на поверхности G и круговым основанием m (см. дерево построений на рисунке 9). Для построения линии пересечения заданных поверхностей можно использовать алгоритм 2, при этом плоскостью отображения может быть общая плоскость оснований m и n заданных поверхностей, а проецирующим фактор-множеством Ф 2(1) пространства E 3 может быть, например, связка прямых с центром в точке 3, либо связка прямых с бесконечно удалённым центром, параллельных общей образующей а пересекающихся поверхностей G и Q . В первом варианте образом конической поверхности Q на плоскости отображения будет окружность m её основания, а образом цилиндрической поверхности G будет пучок окружностей с центрами на прямой (5,7); во втором варианте образом поверхности G на плоскости отображения будет окружность n её основания, а образом поверхности Q - пучок прямых с центром в точке 5 (см. рисунок 8). В варианте 1 построение точек искомой линии пересечения сводится к определению точек пересечения образующих прямых конической поверхности Q с цилиндрической поверхностью G . Этот вариант использован в решении рассматриваемой задачи, и его последовательность отражена в дереве построений (см. рисунок 9).
В итоге биквадратная линия пересечения заданных квадрик представляется в виде двух компонент: пространственной алгебраической кривой третьего порядка Spl и прямой линией а . (Порядок пространственной алгебраической кривой есть число точек пересечения кривой с плоскостью пространства. Построение точек пересечения образующих конической поверхности Q с цилиндрической поверхностью G может быть выполнено многократным повторением изменённого алгоритма 2).
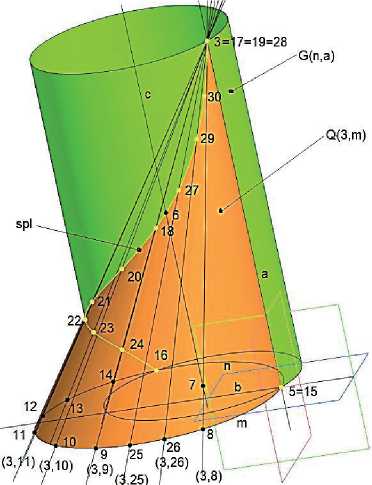
Рисунок 8 – Случай распадения линии пересечения двух квадрик: 4=3+1
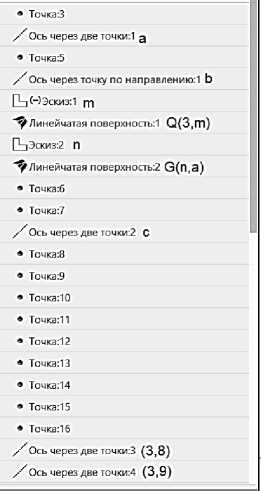
Рисунок 9 – Дерево 3D-моделирования линии пересечения квадрик (4=3+1)
Теоретические основы и анализ множества выполненных автоматизированных решений позиционных задач на пересечение геометрических объектов в специализированной программной среде САПР КОМПС-3D позволил определить понятия «геометрическое моделирование» и «3D-моделирование».
Геометрическое моделирование - это математическое моделирование геометрических объектов пространства, в частности евклидова пространства E 3 .
3D-моделирование – это процесс создания виртуального трёхмерного представления объекта по его математической модели с помощью специализированного программного обеспечения.
Предложенные конструктивные алгоритмы для решения позиционных задач могут быть использованы при проектировании и изготовлении различных изделий машиностроения. Например, при выполнении соединения деталей сварными швами (рисунок 10). Спроектированная теоретическая линия пересечения поверхностей деталей задаёт эквидистантную по отношении к ней траекторию перемещения рабочей точки электрода сварочного аппарата.
В другом случае при формировании переходной или сглаживающей поверхности для двух базовых поверхностей детали необходимо вначале определить линию пересечения этих поверхностей. Приняв её за направляющую линию переходной поверхности, сформировать саму поверхность (рисунок 11).
Предложенные алгоритмы могут быть использованы как набор дополнительных инструментов для контроля правильности и точности решений позиционных задач стандартным функционалом САПР. На рисунке 12 представлены два решения одной и той же задачи по определению линии пересечения двух поверхностей вращения в САПР КОМПАС-3D. Одно из них выполнено в соответствии с алгоритмом 2 и является теоретически верным (справа).
Линия пересечения представляет собой две пересекающиеся плоские кривые (эллипсы a и b). Другое решение (слева), выполненное при тех же исходных данных стандартным функционалом КОМПАС-3D, является ошибочным: имеются две пространственные кривые (c и d). Очевидно, технологическое формообразование детали по линии пересечения должно выполняться по варианту справа. В этом случае соединение составных поверхностей детали на основе сварного шва будет производиться электродом сварочного аппарата по двум плоским траекториям за одну установку в отличие от варианта слева с двумя разомкнутыми пространственными траекториями.
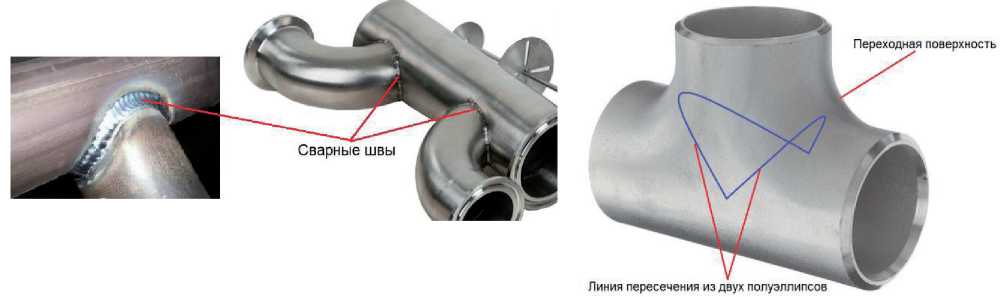
Рисунок 10 - Сварные швы, выполняемые по линии пересечения поверхностей соединяемых деталей
Рисунок 11 - Переходная поверхность на основе линии пересечения базовых поверхностей
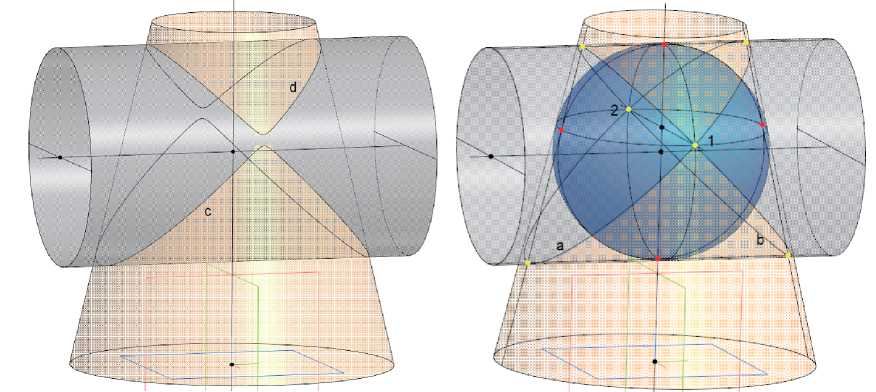
Рисунок 12 - Визуализация линии пересечения двух поверхностей вращения, построенной в САПР КОМПАС-3D: слева - с использованием стандартного функционала; справа - с использованием функционала, реализующего предложенный алгоритм 2
Заключение
Выполненное в работе теоретико-множественное обоснование способов решений позиционных задач на пересечение в пространстве E 3 позволило создать единый фундамент для разработки конструктивных алгоритмов решений указанных задач. Предложенные алгоритмы решений реализованы конструктивно в пространстве и не привязаны к известным технологиям проекционных решений позиционных задач.
Использование конструктивных алгоритмов и программных возможностей современных САПР позволило получить компьютерные решения позиционных задач на пересечение. Предложенные алгоритмы конструктивных решений могут быть рекомендованы к применению в проектной и конструкторской практике при формообразовании изделий машиностроения с учётом линий пересечения поверхностей их конструктивных элементов.
Список литературы Конструктивные алгоритмы автоматизированного решения позиционных задач
- Четверухин Н.Ф. и др. Начертательная геометрия. М.: Высшая школа, 1963. 420 с.
- Иванов Г.С. Теоретические основы начертательной геометрии. М.: Машиностроение, 1998. 157 с.
- Rehbock F. Darstellende Geometrie. Berlin: Springer-Verlag, 1969.
- Харах М.М., Козлова И.А., Славин Б.М., Гусева Т.В. Построение линии пересечения некоторых сложных поверхностей 2-го порядка в КОМПАС с помощью 2D- и 3D-технологии // Геометрия и графика. 2015. Т.3. №2. С.38-45. DOI: 10.12737/12167.
- Волошинов Д.В., Кожевина И.В. Компьютерное моделирование позиционных задач. Отношения инцидентности. СПб.: СПбГТУ, 1996. 98 с.
- Талалай П.Г. Компьютерный курс начертательной геометрии на базе КОМПАС-3D. Санкт-Петербург: БХВ-Петербург, 2010. 608 с.
- Ямпольский А.А. Когнитивные проблемы освоения графических дисциплин при подготовке инженеров // Онтология проектирования. 2024. Т.14, №3(53). С.335-343. DOI: 10.18287/2223-9537-2024-14-3-335-343.
- Волошинов Д.В. Единый конструктивный алгоритм построения фокусов кривых второго порядка // Геометрия и графика. 2018. Т.6, № 2. С.47-54. DOI: 10.12737/article_5b559c70becf44.21848537.
- Короткий В.А. Конструктивные алгоритмы формирования составных кубических кривых Безье в пространстве и на плоскости // Омский научный вестник. 2022. №2(182). С.10-16. DOI: 10.25206/1813-8225-2022-182-10-16.
- Пеклич В.А. Высшая начертательная геометрия. М.: Изд-во Ассоц. строит. вузов, 2000. 344 с.
- Верещагин Н.К., Шень А. Лекции по математической логике и теории алгоритмов. Часть 1. Начала теории множества. М.: МЦНМО, 1999. 128 с.
- Хаггарти Р. Дискретная математика для программистов. Москва: Техносфера, 2012. 400 с.
- Согомонян К.А. Линейно-конструктивные методы формообразования (Геометрическое моделирование). Ереван: Изд-во АЙАСТАН, 1990. 216 с.
- Денисова Е.В., Гурьева Ю.А. Аналитическое и компьютерное моделирование поверхностей методом криволинейного проецирования // Онтология проектирования. 2023. Т.13, №2(48). С.204-216. DOI: 10.18287/2223-9537-2023-13-2-204-216.
