Контроль текущих условий распространения сигналов навигационных спутников

Автор: Демьянов В.В., Ясюкевич Ю.В., Дзин Ш.
Журнал: Солнечно-земная физика @solnechno-zemnaya-fizika
Статья в выпуске: 22, 2013 года.
Бесплатный доступ
Предлагается использовать индекс мерцаний S 4 для организации контроля текущего состояния условий распространения радиоволн и качества измерения радионавигационных параметров по сигналам отдельных навигационных спутников. На примере одновременных наблюдений погрешностей навигационно-временных определений с помощью отечественной навигационной аппаратуры пользователя GPS/ГЛОНАСС МРК-19Л и текущих геомагнитных условий в период мощной магнитной бури 9 ноября 2004 г. подтверждена возможность использования индекса S 4 в указанных целях.
Короткий адрес: https://sciup.org/142103502
IDR: 142103502 | УДК: 550.388.2
Controlling current conditions of navigation sattelites’ signal propagation
We suggest using the S 4 scintillation index to control the current radiowave propagation condition and radio navigation parameter measurement quality by signals from individual GPS satellites. We corroborate the possibility to use the S 4 index for the above purposes by example of simultaneous observations of navigation-temporal positioning errors via applyng user's GPS/ GLONASS МРК-19Л navigation equipment and current geomagnetic conditions during the 2004 November 9 powerful magnetic storm.
Текст научной статьи Контроль текущих условий распространения сигналов навигационных спутников
Совершенствование навигационного обеспечения различных народно-хозяйственных объектов на основе спутниковых радионавигационных систем (СРНС) требует учета факторов, которые раньше практически не рассматривались. Среди таковых можно считать значимыми многомасштабные возмущения среды в околоземном космическом пространстве (ОКП) во время геомагнитных возмущений, а также прямое воздействие мощных всплесков радиоизлучения Солнца в диапазоне частот 1–2 ГГц. Кроме этого, в новейшей работе [Голубков и др., 2012] указывается, что в ионосфере вследствие солнечных вспышек могут возникать дополнительные негативные эффекты. В частности, в [Голубков и др., 2012] показано, что под воздействием солнечных вспышек на верхнюю атмосферу Земли мощность некогерентного излучения ионосферной плазмы в диапазоне частот 0.8–1.8 ГГц увеличивается на три-четыре порядка по сравнению с невозмущенными условиями. По мнению авторов [Голубков и др., 2012], это явление может вызывать значительный фединг мощности сигналов навигационных спутников (НС) СРНС в точке приема.
В целом воздействие перечисленных факторов на функционирование аппаратуры пользователей СРНС сводится к явлениям регулярной и нерегулярной рефракции, интерференционных замираний (мерцаний) трансионосферных сигналов, а также дисперсионным искажениям и прямому подавлению сигналов НС. Основным следствием всего этого являются значительные плавные и хаотические колебания отношения сигнал/шум трансионосферных сигналов в точке приема [Kintner et al., 2001; Doherty et al., 2004; Muella et al., 2010].
Многочисленные современные исследования показывают, что именно нерегулярные эффекты возмущений среды в ОКП и воздействие мощного электромагнитного излучения в диапазоне частот 1–2 ГГц способны вызвать существенное снижение точности или даже срывы измерений основных радионавигационных параметров (РНП) – кодовой псеводза-держки и фазы несущей на обеих рабочих частотах СРНС [Kintner et al., 2001; Doherty et al., 2004]. Из-
вестно, что при условии справедливости линейного приближения рабочей части дискриминационной
характеристики следящего измерителя точность измерения фазы несущей и псевдозадержки огибающей можно определить следующими выражениями [Перова, Харисова, 2005]:
где
σ 2 φ
2 σ ∆τ
^F PLL- f1 +----- 1----- .
CN 0 ( 2 CN 0 T cor J
. A F dll т Э f 1 + 2
2 CN 0 ‘ ( CN 0 ‘ T cor
,
\
,
CN О ‘ = CN 0 р 2( Ет ) sinc2 1 Е f
Т
COR
эквива-
лентное отношение сигнал/шум (дБ·Гц) на входе следящего измерителя; T COR – время накопления в интеграторе измерителя; Δ F PLL , Δ F DLL – шумовая полоса схемы слежения за фазой и псевдозадержкой соответственно (Гц); τ Э – длительность элемента дальномерного кода; ρ(ε τ ) – значение корреляционной функции дальномерного кода; ε f – погрешность оценки доплеровской частоты сигнала (Гц); ε τ – погрешность оценки псевдозадержки сигнала (c); CN 0 – отношение сигнал/шум на входе измерителя (дБ·Гц).
Из выражений (1) и (2) следует, что уменьшение отношения сигнал/шум в точке приема, в том числе и вследствие действия перечисленных выше гелиогеофизических явлений, ведет к снижению точности измерения основных радионавигационных параметров.
Точно прогнозировать действие нерегулярных возмущений среды в ОКП и всплесков электромагнитных излучений в диапазоне рабочих частот СРНС не представляется возможным. В связи с этим возникает актуальная прикладная задача – организация эффективного контроля текущего состояния условий распространения сигналов НС. Такой контроль даст возможность адаптации навигационной аппаратуры пользователя (НАП) СРНС к резко изменяющимся условиям распространения сигналов
НС. Это может быть достигнуто путем адаптивной перестройки следящих измерителей сопровождения псевдозадержки и фазы несущей, а также путем исключения НС, в данных которых содержатся аномально большие погрешности измерения параметров сигналов, из процесса решения навигационной задачи.
Как следует из (1) и (2), контроль текущих условий распространения радиоволн с последующей оценкой качества измерений радионавигационных параметров в возмущенных и невозмущенных условиях может быть достаточно просто реализован на основании измерений характеристик амплитуды сигнала НС. Целью данной статьи является анализ возможности использования индекса ионосферных мерцаний S 4 для выполнения оперативного контроля целостности измерений РНП по сигналам отдельных НС в условиях геомагнитных возмущений среды распространения сигналов СРНС.
Связь индекса мерцаний трансионосферных сигналов и многомасштабных ионосферных возмущений
Известно, что в условиях геомагнитных возмущений в ионосфере происходит интенсификация неоднородностей электронной концентрации (ЭК) всех пространственно-временных масштабов [Аф-раймович, Перевалова, 2006]. При этом наклон логарифмического спектра мощности ионосферных возмущений (ИВ) меняется мало, что говорит о пропорциональном перераспределении энергии геомагнитного возмущения по ионосферным возмущениям всех масштабов. Основная доля энергии возмущений в спектре приходится на крупномасштабные и среднемасштабные перемещающиеся ИВ (КМ ПИВ и СМ ПИВ соответственно). Вместе с тем именно в областях распространения КМ ПИВ и СМ ПИВ возникают условия для формирования мелкомасштабных ПИВ [Афраймович, Перевалова, 2006].
Мелкомасштабные ПИВ (ММ ПИВ) служат общей причиной появления ионосферных мерцаний амплитуды и фазы трансионосферных сигналов, но механизмы возникновения мерцаний различны. Так, мерцания фазы могут возникнуть вследствие как хаотической рефракции на неоднородностях ЭК порядка 1–10 км, так и дифракции сигнала на мелкомасштабных неоднородностях ЭК с характерным масштабом первой зоны Френеля ~√λ z (сотни метров). Причиной возникновения амплитудных мерцаний служит интерференция рассеянных волн сигнала НС на мелкомасштабных неоднородностях ЭК, а также, хотя и в меньшей степени, собственно рассеяние мощности сигнала на этих неоднородностях [Гундзе, Лю , 1982]. Проявление того или иного типа мерцаний и их длительность зависят также от взаимного положения и взаимной скорости пересечения луча зрения на НС и области, содержащей неоднородности ЭК [Anderson, 2005].
Таким образом, можно непосредственно связать вариации амплитуды и фазы сигналов навигационных спутников в точке приема с пространственновременными характеристиками мелкомасштабных ионосферных неоднородностей, а косвенно и с ха- рактеристиками скорости и направления дрейфа СМ ПИВ и КМ ПИВ. В связи с этим в последнее время появился ряд исследований, направленных на разработку модифицированных индексов ионосферных мерцаний на основе измерений амплитуды и фазы сигналов НС, которые можно использовать в качестве инструмента для эффективного диагностирования тонкой структуры среды в ОКП [Valladares, Doherty, 2009; Sajan et al., 2012].
Однако пока не решалась обратная задача, т. е. не предлагался индекс состояния среды распространения радиоволн, предназначенный для контроля текущего качества измерений радионавигационных параметров с учетом текущего состояния канала распространения радиоволн в ионосфере в различных гелиогеофизических условиях.
Рассмотрим возможность использования в таком качестве индекса мерцаний S 4 . Известно, что указанный индекс введен для непосредственной оценки величины ионосферных мерцаний интенсивности трансионосферного сигнала ( P ) в точке приема и определяется как нормированная дисперсия флуктуаций сигнала [Van Dierendonck, Hua, 2001]
Поскольку величина индекса S 4 прямо связана с текущим значением отношения сигнал/шум в точке приема, то, в силу (1) и (2), индекс S 4 может быть использован и для оценки текущего качества измерения основных РНП. Привлекательным индекс S 4 для использования в данных целях делает техническая простота его оценки непосредственно на основании обработки амплитудных измерений в аппаратуре пользователя СРНС.
В то же время текущее значение индекса S 4 зависит от основных параметров трансионосферного канала распространения радиоволн и мерцаний фазы несущей, т. е. описывает весь основной комплекс механизмов, которые в конечном счете ведут к деградации качества измерений основных РНП.
Рассмотрим, каким образом связаны между собой индекс мерцаний, характеристики канала распространения радиоволн через ионосферу и фазовые мерцания трансионосферного сигнала в точке приема, для чего используем приближение фазового экрана [Кравцов, 1983]. При этом будем считать, что пункт приема сигнала находится в фокальной плоскости фазового экрана на расстоянии zФ от него (рис. 1). Из теории фазового экрана известно, что расстояние до слоя неоднородностей ЭК, при котором в точке наблюдения регистрируется статистическая фокусировка рассеянного сигнала и максимальные мерцания фазы сигнала, равно zФ =
2 π f L 2 4
c 2, σφ
где L 4 – функция 4-й производной от функции пространственной корреляции диэлектрической проницаемости ионосферы:
где ρ – функция пространственной корреляции диэлектрической проницаемости ионосферы [Aarons, 1982]; σφ 2 – дисперсия мерцаний фазы несущей сигнала на экране (рад); f – несущая частота трансионосферного сигнала.
Индекс мерцаний сигнала в точке приема связан с пространственными характеристиками распределения неоднородностей ЭК и дисперсией мерцаний фазы несущей следующим образом [Кравцов, 1983]:
-
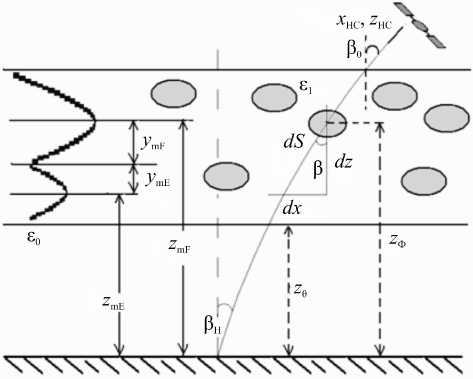
Рис . 1 . К расчету индекса мерцаний .
S 4
×
\
× ln
L
V 7
+ 1 f 1 -ф г z^ L
V
z ® L 4 ))
,
где z ⊕ – расстояние от нижней поверхности слоя рассеивающих неоднородностей ЭК до поверхности Земли (рис. 1); Ф – интеграл вероятностей; L 2, – функция 2-й производной от функции пространственной корреляции диэлектрической проницаемости ионосферы:
- 1
l =[p;]"
Значения производных L 2, L 4 на входе в слой рассеивающих неоднородностей ЭК определяются такими параметрами среды, как L 0 – внешний масштаб области неоднородностей ЭК (м) и L i – внутренний масштаб неоднородности ЭК (м) [Рытов, 1978].
Дисперсия флуктуаций фазы несущей определяется с учетом β Н – угла наклона траектории сигнала НС (рис. 1) и внешнего масштаба неоднородностей ЭК следующим уравнением [Кравцов, 1983]:
2 d Оф = n 2 f p L o f A N ) dx c 2 f 2 sin β N
Н
,
где fp – локальная плазменная частота в ионосфере с ∆N учетом возмущений ЭК, N – интенсивность неод-
нородностей ЭК относительно фонового уровня N .
Выражения (4)–(6) непосредственно связывают величину ионосферных мерцаний интенсивности сигнала НС, представленную индексом S 4 , с основными параметрами канала распространения трансионосферного сигнала. В связи с этим индекс S 4 можно рассматривать как один из адекватных показателей текущих условий распространения сигналов НС через многомасштабное возмущение среды в ОКП, одновременно отражающий текущий уровень интенсивности трансионосферного сигнала в точке приема и, следовательно, ожидаемое качество измерения основных РНП.
Индекс S 4 , вариации ПЭС и качество позиционирования в условиях магнитной бури
Проверим правомерность использования индекса S 4 для оперативной оценки качества навигационных измерений в условиях геомагнитного возмущения. С этой целью использованы данные измерений координат стационарного пункта ISTP (Институт солнечноземной физики СО РАН, Иркутск) с помощью одночастотной навигационной аппаратуры GPS/ГЛОНАСС МРК-19Л. Аппаратура была размещена в стационарных лабораторных условиях на базе Института солнечно-земной физики. Топогеодезическая привязка выносной антенны навигационного приемника МРК-19Л выполнена с помощью двухчастотной НАП GPS ASHTECH Z-XII3T. Одновременные измерения ПЭС по линиям визирования НС, привлекаемых к решению навигационной задачи, обеспечены с помощью этого же двухчастотного приемника.
Структура экспериментального стенда представлена на рис. 2. В состав стенда входят: комплект НАП МРК-19Л, ЭВМ управления режимами работы аппаратуры МРК-19Л (ЭВМ-У), ЭВМ регистрации измерительной информации (ЭВМ-Р). На ЭВМ-У было установлено специализированное программное обеспечение (СПО) для МРК-19Л. С помощью СПО осуществлялся выбор режима работы аппаратуры МРК-19Л, а также режим и протокол обмена данными между МРК-19Л и ЭВМ-Р. Измерительная информация в двоичном формате с выхода НАП поступает в ЭВМ-Р. Нами разработано программное обеспечение регистрации (ПОР), установленное на ЭВМ-Р, которое содержит блок первичной регистрации (БПР) данных и блок вторичной обработки и анализа (БВО).
Программа первичной регистрации осуществляет преобразование данных, которые поступают на СОМ-порт ЭВМ-Р, в стандартный унифицированный формат обмена данными NMEA-0183 с записью с периодом T reg =4 с в первичный файл данных. Далее с помощью БВО из первичного файла данных выделяются отсчеты времени регистрации и текущие топогеодезические координаты приемника. Эти координаты пересчитываются затем в прямоугольные геоцентрические координаты приемника.
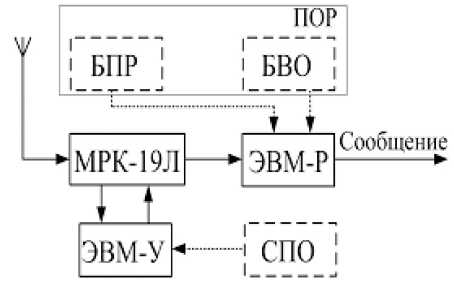
Рис . 2 . Экспериментальный стенд на базе НАП GPS/ ГЛОНАСС МРК -19 Л .
Для наблюдений было выбрано 9 ноября 2004 г., когда наблюдалось сложное геомагнитное возмущение ионосферы, вызванное солнечными вспышками 3 ноября (01:24–01:44 UT) и 5 ноября (11:26– 11:41 UT). В течение первой половины 09.11.2004 г. продолжались умеренные возмущения геомагнитного поля после резкого провала H t -компоненты в 22:00–24:00 UT 7 ноября 2004 г. С 20:00 по 21:00 UT 9 ноября произошло еще одно мощное возмущение геомагнитного поля, вызванное солнечной вспышкой 5 ноября. Таким образом, в выбранный для наблюдений день существовал целый комплекс возмущающих факторов, которые отразились на точности навигационно-временных определений (НВО). Вариации геомагнитного поля в рассмотренный период представлены на рис. 3.
Главным ожидаемым проявлением интенсивных ионосферных мерцаний может служить снижение среднего уровня принимаемого сигнала НС в точке приема при усреднении рядов измерений по всем видимым спутникам. Для подтверждения этого были отобраны ряды измерений амплитуды сигналов НС для каждого часа суток наблюдения. Чтобы более надежно выявить ожидаемый эффект, рассматривались только измерения от НС с углами возвышения γ>60º. Таким способом можно устранить сглаживающее влияние более многочисленных измерений от НС с низкими углами возвышения, для которых эффект затухания сигнала может быть связан не только с геомагнитными возмущениями в ионосфере.
Полученные результаты приведены на рис. 4. В период наблюдений с 04:30 до 09:50 UT над пунктом отсутствовали НС с углами γ>60º, что также указано на рисунке. Можно видеть, что с 19:00 до 21:00 UT наблюдается устойчивое снижение уровня сигналов НС в пункте наблюдения на обеих рабочих частотах. Это явление по времени также совпадает с главной фазой геомагнитного возмущения (рис. 3).
Снижение отношения сигнал/шум в точке приема в силу (1) и (2) может вести в конечном счете к ухудшению качества позиционирования. На рис. 5, а приведены ряды погрешности определения пространственного местоположения пункта ISTP A S = V A X 2 + A Y 2 + A Z 2 с помощью аппаратуры МРК-19Л в режиме «только GPS» с шагом регистрации 4 с. Резкое увеличение погрешностей НВО наблюдалось примерно с 16:00 до 21:00 UT (на
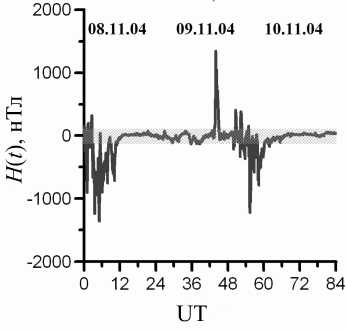
Рис . 3 . Геомагнитные условия наблюдений .
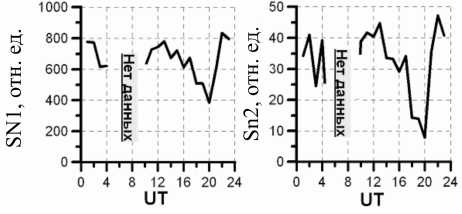
Рис . 4 . Почасовые усредненные значения уровней сигна лов НС с углами возвышения γ >60º по наблюдениям 9 нояб ря 2004 г .
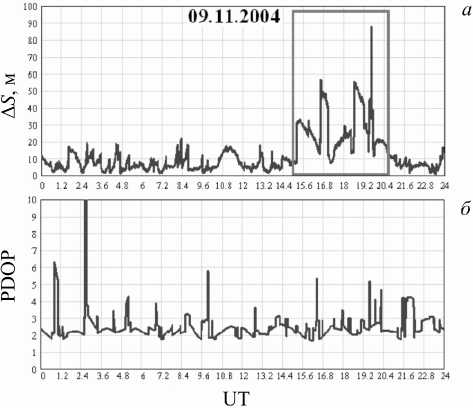
Рис . 5 . Наблюдение погрешностей НВО во время маг нитной бури 09.11.2004 г . с помощью НАП МРК -19 Л .
рис. 5, а этот интервал выделен прямоугольником). В пункте наблюдения этому времени соответствуют ночные часы с 23:00 до 04:30 LT.
Можно отметить, что указанное ухудшение точности НВО по времени появления частично совпадает с главной фазой магнитной бури (рис. 3). Кроме этого, наблюдение максимальной погрешности позиционирования (Δ S ≈90 м) совпадает по времени с устойчивым снижением уровня сигнала НС на обеих рабочих частотах GPS (рис. 4).
Для отделения эффектов, вызванных систематическим ухудшением геометрии наблюдаемого созвездия в пункте ISTP в течение суток, на рис. 5, б представлены ряды значений геометрического фактора PDOP (Position dilution of precision) с тем же шагом регистрации. Можно отметить, что всплеск погрешности в данном случае не совпадал с максимальными значениями PDOP, которые наблюдались в 01:10 и 02:20 UT (локальная особенность пункта наблюдений). При этом с 16:00 до 21:00 UT наблюдались лишь кратковременные всплески PDOP>3.5. Таким образом, преобладающее значение для увеличения погрешности НВО в указанный период имеют, вероятно, именно ионосферные мерцания уровня сигнала НС в точке приема.
На рис. 6 и 7 приведены примеры расчета ПЭС по сигналам НС PRN06 и PRN20 в 00:00–03:00 UT 9 ноября и значений индекса S 4 . На рис. 6, а представлены временные ряды ПЭС с удаленным трендом. Методика удаления тренда описана в [Афрай-мович, Перевалова, 2006]. Расчет значений ПЭС на основании двухчастотных измерений фазы несущей приемником ASHTECH Z-XII3T проводился с шагом 30 с. На рис. 6, б показаны ряды производной ПЭС по времени, а на рис. 6, в – значения S 4. Расчет индекса мерцаний выполнялся на основании измерений отношения сигнал/шум на первой частоте GPS с помощью аппаратуры МРК-19Л по формуле (3), в которой Р – текущее значение отношения сигнал/шум, измеренное с шагом 4 с в относительных единицах. Усреднение измерений P при расчете индекса мерцаний по формуле (3) выполнялось на интервале времени 28 с, чтобы обеспечить соответствие во времени между измерениями ПЭС и рассчитанными значениями S 4 .
Из рис . 6, а – в можно видеть , что при измерениях по спутнику PRN20 короткопериодические возмущения ПЭС , соответствующие мелкомасштабным неоднородностям ЭК, достаточно невелики, а преобладают плавные рефракционные изменения ПЭС . Это находит отражение и в небольших значениях индекса S 4 ≤0.1.
Ситуация изменяется после 16:00 UT. Это можно видеть на рис. 7, где приведены те же данные и в том же порядке для спутника PRN06.
Как можно убедиться, здесь преобладают быстрые вариации ПЭС, обусловленные возможным присутствием интенсивных мелкомасштабных неоднородностей ЭК. Соответственно, наблюдается и весьма значительный индекс мерцаний S 4≥0.8 (рис. 7, в ). Таким образом, можно констатировать совпадение по времени между снижением качества позиционирования и возмущениями среды распространения сигналов НС, которые достаточно точно отражены с помощью индекса мерцаний S 4.
Обсуждение и заключение
Совокупность рассмотренных данных демонстрирует, что индекс S 4 адекватно отражает состояние среды распространения навигационного сигнала в рассмотренных сложных геомагнитных условиях при наложении эффектов нескольких геомагнитных возмущений среды распространения радиоволн. Таким образом, можно рекомендовать данный индекс для оперативного контроля качества измерений РНП по сигналам отдельных спутников в условиях магнитных бурь.
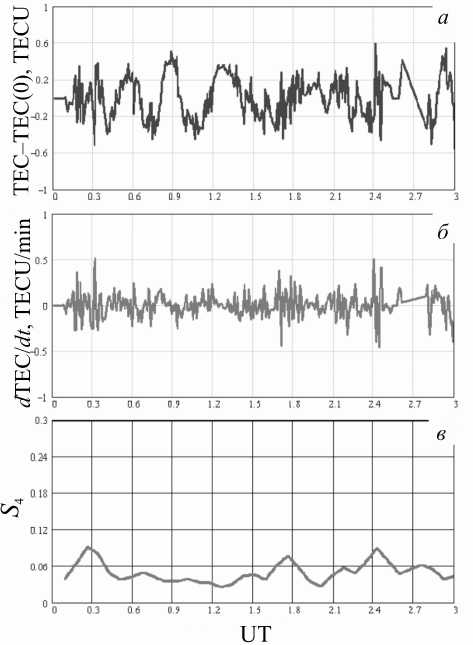
Рис . 6 . Вариации ПЭС и индекс S 4 по данным навига ционного спутника PRN20.
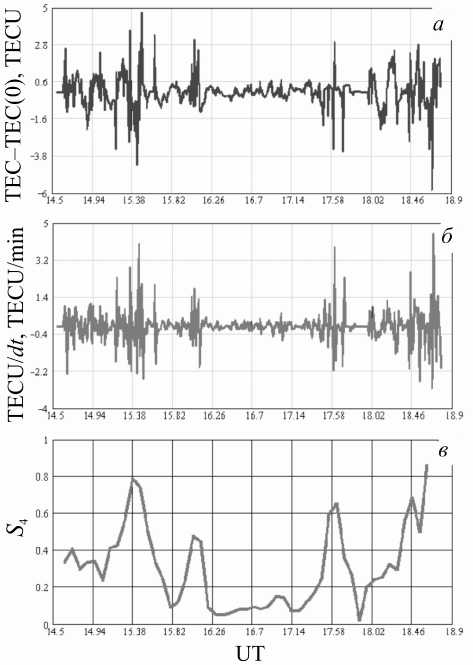
Рис . 7 . Вариации ПЭС и индекс S 4 по данным навига ционного спутника PRN06.
Вместе с тем необходимо отметить ряд ограничений, которые не были приняты во внимание. Прежде
всего, неопределенным параметром остается время накопления измерений для оценки средней интенсивности сигнала в точке приема – ( P . В зависимости от текущих преобладающих механизмов формирования ионосферных мерцаний и ракурсных условий измерений РНП, время накопления амплитудных измерений, при котором адекватно отражается текущее состояние канала распространения радиоволн, может существенно различаться. Решение данного вопроса требует проведения соответствующих исследований с привлечением амплитудных и фазовых измерений сигналов НС с высоким временным разрешением в разнообразных условиях наблюдений.
Приближение фазового экрана, для которого показана связь между индексом мерцаний и параметрами ионосферного канала распространения радиоволн, становится неприемлемым в случае прохождения волны сквозь слой неоднородностей большой интенсивности и толщины. Такая ситуация характерна для низкоширотной и экваториальной ионосферы [Aarons, 1982]. В данном случае наблюдается насыщение амплитудных мерцаний, а если нерегулярный слой толстый, развитие амплитудных флуктуаций будет происходить внутри него и при выходе волна окажется уже подверженной и фазовым и амплитудным возмущениям [Afraimovich et al., 2009]. В этой ситуации индекс S 4 может служить только количественной мерой амплитудных мерцаний, но не фазовых. Этого может быть недостаточно для адекватной оценки текущего состояния канала распространения сигналов отдельных НС. Так, известны случаи срыва сопровождения сигналов НС вследствие резких изменений фазы несущей на коротком промежутке наблюдений при относительно небольших вариациях амплитуды сигнала [Afrai-movich et al., 2009].
Все вышесказанное позволяет поставить вопрос о проведении отдельных исследований по разработке более универсального индекса состояния среды распространения радиоволн в различных условиях формирования флуктуаций параметров сигнала навигационных спутников.
Авторы выражают глубокую благодарность рецензенту за серьезное и внимательное отношение к рукописи и сделанные весьма полезные и существенные замечания, которые позволили значительно улучшить работу.
Работа выполнена при финансовой поддержке гранта президента РФ МК-2194.2011.5, Министерства образования и науки РФ (соглашение № 8699 и №8388, ГК № 14.518.11.7065), РФФИ (грант 12-05-33032а).
