Корпусная заготовка с комплексом гидродомкратов как объект управления

Автор: Ремнева Оксана Юрьевна, Самохина Наталья Станиславовна, Горшков Борис Михайлович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-1 т.14, 2012 года.
Бесплатный доступ
В статье проведены теоретические исследования корпусной заготовки с гидродомкратом как объект управления. Получена структурная схема объекта управления при возмущающем и управляющем воздействиях.
Корпусная заготовка, комплект гидродомкратов, объект управления, динамическая модель, передаточные функции, управляющие, возмущающие воздействия
Короткий адрес: https://sciup.org/148201677
IDR: 148201677 | УДК: 621.9
Case preparation with the complex of hydrojacks as object of management
In this article are conducted theoretical researches of case preparation with a hydrojack as object of management. The block diagram of object of management is received at revolting and operating influences.
Текст научной статьи Корпусная заготовка с комплексом гидродомкратов как объект управления
Представим динамическую модель обрабатываемой корпусной заготовки как одномассовую, располагающуюся на трех упругих опорах (одна жесткий опорный элемент и два гидродомкрата) с коэффициентами жесткости С 1 , С 2 , С 3 и демпфирования р 1 , р 2 и Р 3 соответственно (рис. 1).
К обрабатываемой корпусной заготовке, приложена сила резания P ( t ) . Ее действие можно представить как P ( t ) с координатой z p [3].
Для нахождения реакций в точках установки корпусной заготовки на столе станка, представим ее в виде абсолютно жесткой рамы ABCDEF (рис. 2), находящейся в равновесии под действием системы сил – веса заготовки G заг . , резания P ( t ) , реакций опор R a , R b и R C . Причем в точке A располагается жесткий опорный элемент к которому с помощью струбцины прижата корпусная заготовка, а в точках B и C опорные элементы заменены двумя гидродомкратами, соединенными с заготовкой с помощью болтовых соединений.
Используя уравнения статики можно найти реакций опор R A , R B и R C и определить величины перемещений в точках A , B и C .
Y A
Y В
R
C
A
R В
С 2
G Заг. + Р ( t ) Z p . 2 С 1 l 1 С 1 ’
=(1 + 2 G..
zP х P ( t ) к
— )_LZ---2 ; (1)
к С2 (к + к)
= R^ = (1 + 1G _ z^) Pit!--l2---.
С 3 2 Заг ■ 11 С 3 (12 + 13)
Величина реакций, а следовательно и пере-
мещения в точках A , B и C связано с координатой Z p приложения силы резания P ( t ) . Учитывая, что гидродомкраты предполагается установить в точках B и C корпусной заготов-
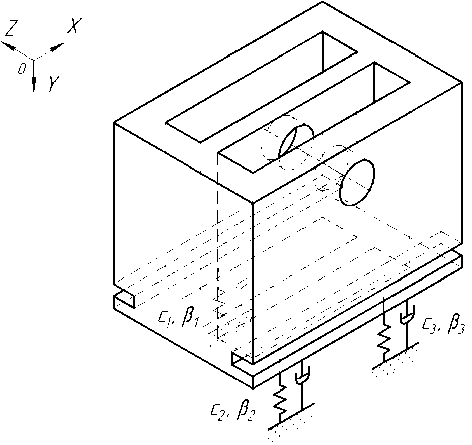
Рис. 1. Динамическая модель корпусной заготовки
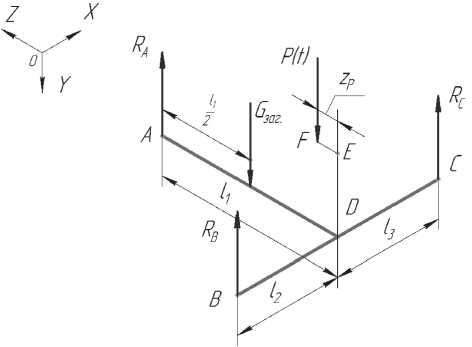
Рис. 2. К определению перемещений заготовки
в точках установки опор
мущающему воздействию точке F (рис. 3).
P f
, приложенную в
Представим перемещения отдельных точек
ки, остановимся на подробном анализе перемещений в этих точках.
Так перемещение в точке B состоит из отдельных составляющих перемещений.
Y b ( t ) = Y f + Y , ( t ) + Y 2 ( t ) + Y 3 ( t ) + Y 4 ( t ), (2) где Y f ( t ), Y i ( t ), Y 2 ( t ), Y з ( t ) и Y 4 ( t ) - перемещения вызванные: смещением точки F контакта режущего инструмента и заготовки; контактными деформациями “основание корпусной за-готовки-опорной части гидродомкрата”; контактными деформациями “опорной части гидродомкрата-мембраны гидродомкрата”; сжимаемостью жидкости гидравлического давления из-за наличия пузырьков воздуха в системе; и контактными деформациями “основание гидро-домкрата-зеркало стола” соответственно.
Перемещение в точке С аналогично можно представить как отдельные составляющие перемещений
Y C ( t ) = Y f ( t ) + Y 5 ( t ) + Y 6 ( t ) + Y 7 ( t ) + Y 8 ( t ), где Y 5( t ), Y 6( t ), Y 7( t ) и Y 8 ( t ) перемещения вызванные: контактными деформациями “основание корпусной заготовки и опорной части гидродомкрата”; контактными деформациями “опорной части гидродомкрата и мембраны гидродомкрата”; сжимаемостью жидкости гидравлического давления; и контактными деформациями “основание гидродомкрата и зеркало стола” соответственно.
Составляющие перемещений характеризуются коэффициентами жесткости C i , демпфирования P i .
Представим корпусную заготовку с комплексом гидродомкратов как динамическую модель с приведенной массой m по отношению к воз- динамической модели как перемещения точек I…V в линейной постановки. Тогда их переме- щения можно представить следующими уравнениями:
Y(t) - Yf(t)+Yпр (t)+Y2 пр (t)+Ynp (t)+Y4 пр (t);
Y u ( t ) - Y i пр ( t ) + Y 2 пр ( t ) + Y 3 пр ( t ) + Y 4 пр ( t );
Ym ( t ) = Y 2 пр ( t ) + Y 3пр ( t ) + Y пр ( t ); (3)
Y v ( t ) = Y 3 пр ( t ) + Y 4 пр ( t );
Y v ( t ) = Y , пр ( t ) где Y i пр ( t ) = Y i ( t ) " Ys(t );
Y 2 пр ( t ) = Y 2 ( t ) - Y 6 ( t );
Y 3 пр ( t ) = Y 3 ( t ) - Y 7 ( t );
Y i ( t ) - Y n ( t ) = Y f ( t );
Yu ( t ) - Yi n ( t ) = Y i пр ( t );
Yin ( t ) - Y v ( t ) = Y ? пр ( t );
Y v ( t ) - Y v ( t ) = Y 3пр ( t ); Y v ( t ) = Y 4 пр ( t ).
Следует отметить, что выбор точки F , относительно которой записываются все уравнения движения, не случаен. Это можно объяснить тем, что решение основной задачи стабилизации осей растачиваемых отверстий и инструмента наиболее эффективно достигается когда гидродомкрат устанавливается в точках B и C базирования корпусной заготовки, а точкой приведения является точка F . Это упрощает написание уравнений движения.
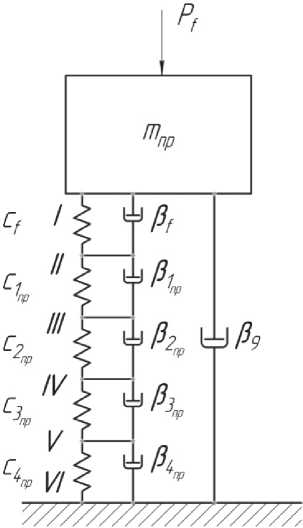
Рис. 3. Динамическая модель обрабатываемой корпусной заготовки с комплексом гидродомкратов
Перемещение точки D корпусной заготовки можно описать системой дифференциальных уравнений pt)=тпр dY+C y-Y-)f (dY- dY)+a dY;
C(V V\ R( i ПХ — П (V V\a_R ( И и±Ш\.
Cf(Y -y") + P f ( dt dt ) = C пр (Y I Y11 ) 4 пр ( dt dt );
dY dY dY dY dYII dYIII dYIII dYIV
4пр ( I I, ) p пр ( dt dt ) пр ( '” IV ) Р пр ( dt dt ); (4)
dY dY dY dY
C 2 пр (Y ,,, - Y v ) + А пр ( dY - df ) = C пр (Y v - Y ) + А пр ( dY - dY );
dt dt dt dt dY dY dY
C (Yy - y ) + А ( dY - dY ) = C У + А dY .
3пр ( . V) pпр ( dt dt ) 4п V Рпр dt где C 1 пр , С 2 пр , С 3 пр , С 4 пр – приведенные коэффициенты жесткости в стыках “основание корпусной заготовки-опорной части гидродомкрата”, “опорной части гидродомкрата-мембраны гидродомкрата”, сжимаемости жидкости гидравлического давления и в зоне контакта “основание гидродомкрата-зеркало стола” соответственно.
p i пр , Р 2 пр , Р 3 пр , Р 4 пр — “основание корпусной заготовки-опорной части гидродомкрата”, “опорной части гидродомкрата-мембраны гидродомкрата”, сжимаемости жидкости гидравлического давления и в зоне контакта “основание гидродомкрата-зеркало стола” и гидродомкрата соответственно.
Составим систему уравнений (4) в операторной форме.
P s ) - т пр ( Yf+ Y i пр + У пр + Y 3 пр + У пр ) s 2 - '
А ( Y f + Y i пр + Y пр + Y 3 пр + Y пр ) s = -^ f + 1 ) Y f ( s ) ;
C f
p ( s ) - m ( yf + Y + Y + Y + Y ) s 2 - пр f 1 пр 2 пр 3 пр 4 пр
Р 9 ( Y f + Y i пр + Y пр + У з пр + Y 4 пр ) s = -¥ - ( Tx s + 1 ) } ; пр ( s ) ;
C 1 пр
P ( s )- т пр ( Y f + Y i пр + Y 2 пр + У з пр + Y 4 пр ) s 2 -
А ( у, + Y + У + Y + У ) s = 9 f 1 пр 2 пр 3 пр 4 пр
,.' T s + 1 } пр ( s ) ; [ (5)
C 2
2 пр
Ps ) - m Y + Y + Y, + Y + Y ) s 2 - пр f 1 пр 2 пр 3 пр 4 пр
А Y + Y + Y + Y + Y ) s =—( Ts + 1 ) y ( s ) 9 f 1 пр 2 пр 3 пр 4 пр 3 3 пр
C 3 пр
P ( s ) - т пр } + Y i пр + У пр + Y 3 пр + У пр >2 -
Р 9 У + У пр + Y пр + } пр + Y пр ) s = -1- T s + 1 ) } пр ( s ) C 4 пр
На основании системы уравнений (5) можно построить структурную схему объекта управления корпусной заготовки с комплексом гидродомкратов по отношению к возмущающему воздействию P ( t ) .
Выходной управляемой величиной следует принять вертикальное перемещение точки F , в которой приложена сила резания P ( t ) .
У вых ( t ) = Y f ( t ) + Y i пр ( t ) + Y 2 пр ( t ) + Y 3 пр ( t ) + Y 4 пр ( t ).
Найдем передаточную функцию объекта, найдем на основании структуры, изображенной на рис. 4.
W
( s ) =
Y ( s )
вых X / _
P f ( s ) "
возм

Ts +1 T 2 s +1 T 3 s +1 T 4 s +1
i+
1/ 1/ 1/ 1/ 1/
/с /с /с /с
/ C f + / C i пр + / C 2 пр + / C 3 пр + / C 4 пр T f- s +1 Ts +1 T 2 s +1 T 3 s +1 T 4 s +1
( p 9 s + mпрs 2 )
Выполнив необходимые преобразования выражение (6) можно представить в виде как
W
возм
( s ) =
У вых ( s ) = P f ( s )
А f ( Tfs + 1 )[ t 3 3 fs 3 + T 2 2 fs 2 + T 1 fs + 1 ]
T 85 f s 5 + T 7 4 f s 4 + T 6 3 f s 3 + T 5 2 f s 2 + T 4 f s + 1
где Р f
—1 + —1 + —1— + —1— - коэффи-c. C, C, c ,
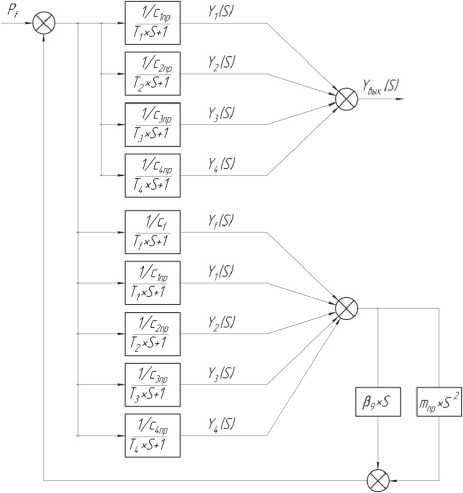
Рис. 4. Структурная схема объекта управления с комплексом гидродомкратов по отношению к возмущающему воздействию
( dYviL_dYL \
F ra ( t ) C 9 W, Y , ) + p 9 I ,
V dt dt )
c 9 V , - ¥ ,
d 2 Y ,
= m*p + dt
, x „ f dY , dY, Л „ C f ( Y , - Y ,, ) + P f I -—T" I + P 9*
V dt dt )
C f (y - y ,,) + p f [ dY - dY A+ py dY = c , n P (y , V dt dt ) dt
C (y -Y }+ Й fdYL-dYL) = c (y пр I, L in T^" р1 пр 2 пр\‘,,, dt dt
V
in.
( d¥ ,, d¥ ,,, ). )+ Р пр V dt dt у
f dY , d¥ „ A
)+ p 2пр I I ;
V dt dt у
C (Y -Y Ar0 f dYLL-dlvL KC (y -yVB fdY V d1V \
2 пр ( 1 II, 1 V ) + P 2 пр I dt dt I 3 пр ( 1 I Y ' ^ P пр I dt dt У
C 3 пр ( Y V
-Y V В f dYV - dYV 1=C Y+B
Y V ) + P 3пр I dt dt I С 4 np I V + P пр
dYV dt
;
dY , ;
dt
В операторной форме эта система принимает вид
F ra ( s ) = C 5 T ra s + Y ( s ^
F ( s ) - тпр [ 1f ( s ) + Y ( s ) + Y 2 ( s ) + Y3 ( s ) + Y 4 ( s )k 2 -
- A Y , ( s ) + ¥ ( s ) + ¥ 2 ( s ) + ¥ з ( s ) + ¥ 4 ( s ) ] s = C f f + 1 ) 1 f ( s ) ;
F ( s ) - тпр [ Y f ( s ) + Y ( s ) + Y 2 ( s ) + Y ( s ) + Y 4 ( s )] s 2 - - A .\Y f ( s ) + 1 1 ( s ) + ¥ 2 ( s ) + ¥ з ( s ) + ¥ 4 ( s ) ] s = C 1 пр (Tx s + 1 )i ; ( s ) ;
Fra (s)-тпр [Yf(s ) + y(s) + Y2(s) + Y3(s) + Y4(s )]s2 -
При использовании в системе автоматической стабилизации двух гидродомкратов в уравнение движения вместо коэффициента демпфирования необходимо ввести значение приведенного коэффициента P 9 * = P 9 + P 9пр , учитывающего действие обоих домкратов.
При рассмотрении объекта по отношению к управляющему воздействию в качестве управляющего воздействия принимаем усилие развиваемое гидродомкратом. Представим динамическую модель объекта регулирования (обрабатываемой корпусной заготовки) при действии силы F ГД , развиваемой гидродомкратом (рис. 5).
Найдем дифференциальные уравнения движения точки F обрабатываемой корпусной за-
- P s .\ Y f ( s ) + 1 1 ( s ) + ¥ 2 ( s ) + ¥ з ( s ) + ¥ 4 ( s ) ] s = C 2 пр ( T 2 s + 1 ) 1 2 ( s ) ;
Fra ( s ) - тпр [ Y f ( s ) + Y ( s ) + Y 2 ( s ) + Y ( s ) + Y 4 ( s )] s 2 - - pPy ( s ) + 1 1 ( s ) + ¥ 2 ( s ) + ¥ з ( s ) + ¥ 4 ( s ) ] s = C 3 пр ( Т з s + 1 ) ¥ з ( s ) ;
Fra ( s ) - тпр [ Y f ( s ) + Y ( s ) + Y 2 ( s ) + Y ( s ) + Y 4 ( s )] s 2 - - A .\Y f ( s ) + 1 1 ( s ) + ¥ 2 ( s ) + ¥ з ( s ) + ¥ 4 ( s ) ] s = C 4 пр ( T 4 s + 1 ) 1 4 ( s ).
готовки.
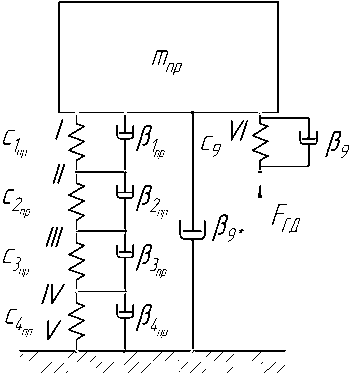
Рис. 5. Динамическая модель объекта регулирования при действии силs F ГД , развиваемой гидродомкратом
На основании системы уравнений (9) можно построить структурную схему объекта управления корпусной заготовки с комплексом гидродомкратов по отношению к управляющего воздействия силы F ГД , создаваемой гидродомкратом (рис. 6).
Передаточная функция упругой системы объекта по отношению к управляющему воздействию силы P ГД , создаваемой гидродомкратом имеет вид:
W yc ( s ) =
Y v ( s )
F гд (s )

T f s + 1 T 1 s + 1 T 2 s + 1 T 3 s + 1 T 4 s + 1

Tf3 + 1 Ts + 1 T 2 s + 1 T 3 s + 1 T4s + 1
( p ) s + т, р ? 2 )
+
T ra s + 1
где Y v ( s ) — перемещение V точки в операторной форме.
Выполнив необходимые преобразования выражение (10) можно представить в виде как
W yc ( s ) =
YV (s ) FГД (s )
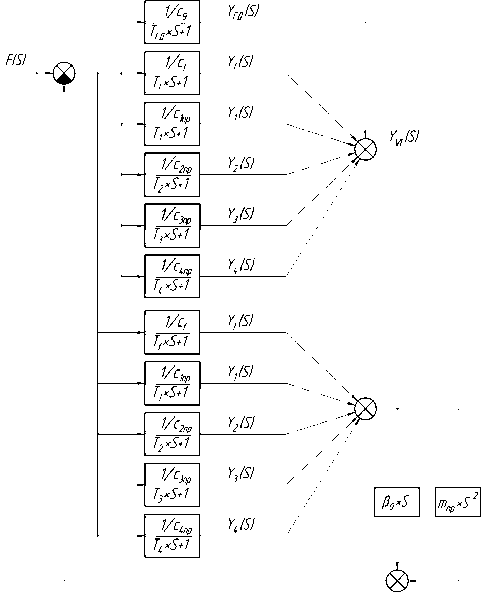
Рис. 6. Структурная схема объекта управления корпусной заготовки с комплексом гидродомкратов при действии силы F ГД
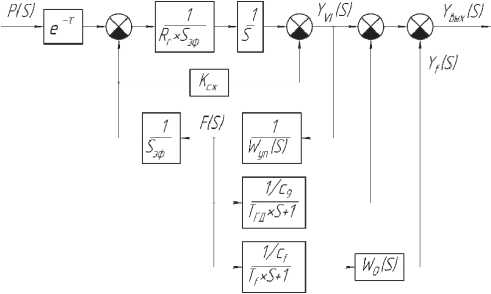
Рис. 7. Структурная схема каналов по управлению
R ТР – сопротивление трубопроводов;
S ЭФ – эффективная площадь мембраны [4].
Структурная схема одного канала объекта по отношению к управляющему воздействию представлена на рис. 7.
W s ) =
x7-----
1 +
/ f + / 1 пр + / пт + / пр + / при T f s + 1 Ts + 1 T2s + 1 T3s + 1 T4s + 1
Преобразуя выражение (13) получим
W 0 ( s ) =
— [ T4f s 4 + T3 s 3 + T2 s 2 + T ,s + 1] 4 f 3 f 2 f 1 f
C
T 4 4 s 4 + T 3 3 s 3 + T 2 2 s 2 + T 1** s + 1
T 4 4 s 4 + T 3 3 s 3 + T2*2 s 2 + T 1* s + 1 ’
(Tгдs + 1)
B f (t^ s + l^ Y s 4 + T 3 3 Y s 3 + T 2 2 Y s 2 + T1 Y s +
__** __ __ __ __ __* __*
где T 1 = T 1 + Т 2 + Т 3 + Т 4 ’ T 5 = T 5 У •
Тогда можно найти передаточную функцию объекта по управлению
T f s 4 + T f S 3
+ T ^ 2jS2 + T f s +
•
W y ( s )
Y вых ( s ) =
P ( s )
Здесь В , = ----+----+----+---- - ко- fC C C C
1 пр 2 пр 3 пр 4 пр эффициент передачи.
На основании методики [2], найдем уравнения движения объекта по отношению к управляющему воздействию – давлению рабочей жидкости, подаваемой в гидродомкрат:
11 1
• ‘
Rr Sэф s 1 + K c • S„ 1W- C ( s )
1 + 1 1 ___________1__ 1
+ Rr S„ 's '1 + Kc . S„ 1Wic ( s )' S„ '«V ( s )
Y v ( s ) =
1 Р ( s ) e - r s - P ГД ( s ) ------------------------- • ----------------------------------------------------------------------------------------
S эф s R Г
X
1 +
1/
1 /С 9
--------------7----7" • ----------------------- W ус ( s ) T ГД s + 1
1 C f
Tfs + 1
• « 0 ( s )
W yc ( s )
Y v ( s ) ; F ГД ( s )
вы ( s ) = Y 1 ( s ) + Y 2 ( s ) + Y 3 ( s ) + Y 4 ( s ) = У гд ( s ) + Y f ( s )•
Здесь P ГД – давление рабочей жидкости в гидродомкрате [2];
РГ = Rrp + RTp - суммарное гидравлическое сопротивление, где RГР – сопротивление гидропреобразователя;
где « ус ( s ) – передаточная функция упругой системы, определяемая из выражения (11).
На рис. 8 представлена структурная схема объекта с учетом его многосвязности.
Таким образом, найденные аналитические выражения (7), (11) и (15) позволяют найти передаточных функций корпусной заготовки с комплексом гидродомкратов по отношению к управляющему и возмущающему воздействиям.

Рис. 8. Структурная схема объекта с учетом многосвязности
Список литературы Корпусная заготовка с комплексом гидродомкратов как объект управления
- Галицков С.Я. Динамика электромеханических исполнительных систем прецизионных станков и роботов. Куйбышев: КПтИ, 1989. 108 с.
- Горшков Б.М., Галицков С.Я., Равва Ж.С. Исследование составной станины прецизионного станка как объект управления//Повышение устойчивости и динамического качества металлорежущих станков. Куйбышев: КуАИ, 1983. С. 97-109.
- Экспериментальная установка для оценки эффективности повышения точности координатно-расточных станков методом стабилизации положения обрабатываемой заготовки и оси шпиндельного узла/Н.С. Самохина [и др.]. Известия Самарского научного центра РАН, 2006. Специальный выпуск ПГУС. С. 121-127.
- Горшков Б.М. Повышение точности прецизионных станков с составными станинами. Саратов: Сарат. гос. ун-т, 2004. 184 с.
