Критерии оптимального управления и LQR-оптимизация в электроприводе

Автор: Кибардин В.В., Ковалева О.А., Язев В.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 12, 2015 года.
Бесплатный доступ
В статье представлен анализ критериев качества систем управления электромеханическими объектами. Синтез систем управления выполняется во временной, частотной областях и в пространстве состояний. В первом случае основными являются критерии минимума расхода энергии на управление и максимального быстродействия. Для их реализации требуются источники бесконечно малой и бесконечно большой мощности соответственно. Устраняет эти противоречия компромиссное управление. Рассмотрены частные случаи этих критериев - минимум тока, минимум тепловых потерь и интегральные оценки качества переходных процессов. В частотной области задача оптимизации решается с помощью критериев модульного (МО) и симметричного (СО) оптимумов. Эти критерии также противоречивы, так как оптимизируют переходные процессы по заданию или по возмущению. Противоречие устраняется путем включения низкочастотного фильтра или с помощью критерия компромиссного оптимума (КО). Основной недостаток критериев МО, СО и КО - неучет внутренней обратной связи объекта управления - устраняется при синтезе корректирующего устройства в пространстве состояний. Математическая модель объекта управления задается векторно-матричными уравнениями, а функционал качества в виде квадратичных форм объединяет критерии минимума расхода энергии на управление и максимального быстродействия. В качестве примера рассмотрен синтез линейно-квадратичного регулятора (LQR-регулятор) для электромеханического объекта (ТП-ДПТ с НВ), заданного в пространстве состояний матрицами A, B, C и D. Получены кривые изменения напряжения, тока и угловой скорости. Соответствующим выбором матриц LQR-регулятора доказана возможность прямого пуска двигателя без устройства плавного пуска. С помощью методов математического моделирования в MATLAB выполнена сравнительная оценка рассмотренных критериев. Исследование в пространстве состояний дает результаты, наиболее близкие к свойствам промышленных систем управления.
Критерии качества, модульный, симметричный, компромиссный опти- мумы, пространство состояний, квадратичные формы, lqr-регулятор
Короткий адрес: https://sciup.org/14084117
IDR: 14084117 | УДК: 621.3(091)
Criteria of optimal control and LQR-optimization of the electric drive
The article presents the analysis of quality control criteria systems of electromechanical objects. The synthesis of control systems is performed in temporal, frequency domains and in state space. In the first case are the main criteria of minimum energy consumption for control and maximum performance. For their a power infinitely small and infinitely large power realization are required, respectively compromise control resolves these contradictions. Particular cases of these criteria are low current, low heat losses and the integral criterion of quality of transient processes. In the frequency domain optimization problem is solved using modular criteria (MO) and symmetrical (SO) Optima. These criteria are also inconsistent optimizing transient processes on the task or perturbation. The paradox is resolved by incorporating the low-pass filter or by using the compromise criterion the optimum (CO). The main drawback of the criteria of MO, SO and CO are not subject to the internal feedback of the control object is eliminated during the synthesis of the correction device in the state space. A mathematical model of the control object is set of vector-matrix equations, and the quality functional in the form of quadratic forms unites the criteria of minimum energy consumption for control and maximum performance. As an example the synthesis of linear-quadratic regulator (LQR controller) for an electromechanical plant (TC-DC motor) specified in the state-space matrices A, B, C and D was considered. The curves of voltage, current and angular velocity were obtained. An appropriate choice of the matrices of the LQR controller proved the possibility of direct motor start without soft starter. The methods of mathematical modeling in MATLAB comparative evaluation of the considered criteria were used. The study in the space of states gives results which are the closest to the properties in industrial control systems.
Текст научной статьи Критерии оптимального управления и LQR-оптимизация в электроприводе
Введение . Промышленные электромеханические комплексы (тиристорный преобразователь-двигатель – ТП-Д) всегда устойчивы по всем переменным состояния, если они являются элементами разомкнутых систем управления. В замкнутых системах управления эти объекты также рассматриваются как устойчивые по переменным вход–выход и могут обладать внутренней неустойчивостью, если нет ограничений на переменные состояния, управления и скорость их изменения.
Для одной и той же устойчивой системы существует множество стабилизирующих воздействий, и необходимо выбирать среди них оптимальное с точки зрения критерия (функционала) качества, который должен иметь физический смысл. Такое управление называется оптимальным. В общем случае для решения задачи оптимизации необходима информация об объекте управления в виде алгебраических и дифференциальных уравнений, связывающих входные, выходные переменные и переменные состояния; о среде функционирования объекта управления и ограничениях на все переменные состояния и управления; о показателе оптимальности (критерии качества, оптимальности, выгоды). Если эта информация доступна, можно выбрать метод оптимизации и ре- шить задачу оптимального управления.
Цель работы. Анализ критериев оптимального управления и методов оптимизации.
При анализе систем управления обычно рассматривают два режима работы – статический и динамический. Поэтому все методы оптимизации делятся на статические и динамические [1, 2]. Объект управления (электрический двигатель) находится в состоянии непрерывного движения под действием различных внешних и внутренних факторов. Следовательно, оценка результата управления дается за время управления Т , и это задача динамической оптимизации.
С помощью методов динамической оптимизации решаются задачи, связанные с распределением ограниченных ресурсов для достижения комплекса конкурирующих целей на протяжении некоторого промежутка времени, а целевая функция записывается в виде интегрального функционала. Ограничения накладываются как на переменные управления, так и на переменные состояния. Обычно это неравенства или интегральные ограничения, так как приходится иметь дело с конечными ресурсами источников энергии или с необходимостью ограничения пределов изменения некоторого параметра в процессе управления, являющегося функцией переменных состояния и управления (например, ускорение, угол поворота вала исполнительного механизма и т.д.) [1, 3].
Анализ и синтез систем управления выполняется во временной, частотной областях и в пространстве состояний. В первом случае общепринятыми считаются интегральные критерии миниму- ма расхода энергии на управление th и максимального быстродействия
∫U(t)·i(t) dt to
→min
J 2=
∫1dt = - to to
= →min.
Рассматриваемые критерии для своей реализации требуют источников бесконечно малой и бесконечно большой мощности соответственно. Следовательно, возникает задача нахождения оптимального закона управления, удовлетворяющего наилучшим образом двум противоречивым критериям.
Для выработки такой стратегии управления предварительно рассчитывают оптимальные управляющие воздействия u 1 * и u 2 * , обеспечивающие, при принятых ограничениях, экстремум функционалам Ј1= J1* и J2 = J2*. Их находят методами вариационного исчисления. Далее рассматривается критерий оптимального управления
= ∙| ∗ ∗ |+ ∙| ∗ ∗ | , (3)
где а и в — весовые коэффициенты, определяемые стратегией управления. В функционале (3) при коэффициентах а и в стоят абсолютные значения величин. Это вызвано тем, что функционалы J1 * и J2 * могут достигать в точке экстремума либо максимум, либо минимум, а разности могут быть и положительными, и отрицательными. Управление, удовлетворяющее критерию (3), называется компромиссным [4].
Математическим аппаратом решения таких задач являются вариационные методы: классическое вариационное исчисление, принцип максимума Л.С. Понтрягина и динамическое программирование Р. Беллмана [1, 3, 5].
Для решения частных задач применяются критерии минимума тока, потребляемого электроприводом, минимума тепловых потерь в электродвигателе, а также известные в теории автоматического управления интегральные оценки качества переходного процесса:
минимум среднеквадратичного отклонения ε2(t)
Ж
J = |s2(t)dt ^ min;
улучшенный квадратичный критерий качества tк
J = j ts2 (t) dt
^ min
t 0
и обобщённый интегральный критерий качества tk
2 .
x + Y i

dt ^ min
J=J
t 0
от квадратичных форм [6]. В последнем критерии x - выходная переменная; y i - весовые коэффициенты при квадратах производных i -го порядка от выходной координаты. Первое слагаемое запрещает длительное существование отклонения х от заданного, а последующие – длительное существование больших производных. Поэтому минимуму интеграла соответствуют достаточно быстрые и плавные переходные процессы. Имея дифференциальное уравнение замкнутой системы и задавая весовые коэффициенты, можно вычислить оптимальное значение функционала. Можно решить и обратную задачу.
Для оптимизации амплитудно-частотных характеристик (АЧХ) замкнутых систем управления электроприводом используют критерии амплитудного (МО), симметричного (СО) и компромиссного оптимумов (КО). Основное требование – максимальная близость АЧХ проектируемой системы к АЧХ идеального фильтра нижних частот, которая математически задается в виде dA2(ro)/dron = 0 при го = 0 (МО), dA2(ro)/dron ^ 0 при го ^ 0 (СО); п= 2, 4, 6....
Из технических устройств этим требованиям удовлетворяют фильтры Баттерворта второго и третьего порядков.
Управление объектом по критерию МО обеспечивает оптимальный переходный процесс при изменении задания и затянутый переходный процесс при изменении нагрузки, система управления является астатической по заданию и статической по возмущению. Системы с регуляторами, структура и параметры которых выбраны по критерию СО, имеют оптимальный переходный процесс при изменении нагрузки и неблагоприятный переходный процесс при изменении задания (перерегулирование до 43%), относительно небольшие запасы устойчивости по амплитуде и фазе, чувствительны к изменениям параметров объекта управления, являются астатическими как по заданию, так и по нагрузке. Таким образом, эти два критерия также являются противоречивыми. Устранить эти противоречия можно путем включения на вход системы СО низкочастотного фильтра (система с двумя степенями свободы) или выбирать регуляторы по критериям линейного и компромиссного оптимумов [7–10].
При решении задач оптимизации в пространстве состояний, когда линейная стационарная система задана векторно-матричными уравнениями
̇= = + ; = , dt целесообразно представлять критерии (1) и (2) в виде квадратичных форм
и переходить к функционалам
∞∞
∫ → , = ∫ → о о
/б
∞
= ∫( + +2 ) → ,
о
∞
= ∫( + +2 ) → .
о
Закон управления u находится в форме линейной обратной связи [11–14] по переменным состояния x или по переменным выхода у , т.е.
u = ± Kx , u = ± Ky .
Такое управление минимизирует квадратичные критерии качества (6).
Здесь Q и R - симметричные положительно определённые матрицы размерностью [n x n] и [m x m] соответственно; К - матрица постоянных коэффициентов размерностью [m^n], на значения которых нет ограничений. Если входной параметр N опущен, он принимается нулевым.
Известно [13–15], что решение данной задачи, которая называется задачей линейной интегральной квадратичной оптимизации ( LQR-оптимизации ), в пространстве состояний определяется выражением
u = R-1BTPx , где матрица Р должна удовлетворять уравнению Рикатти АТР + РА - РВR-1BТР + Q = 0.
Критерии (6) также противоречивы, так как для реализации первого слагаемого требуется источник бесконечно большой мощности, а для второго – источник бесконечно малой мощности. Это можно объяснить следующим: выражение
∞
=∫ является нормой II х|| вектора х, т.е. мерой его колебательности в процессе регулирования, и, следовательно, принимает меньшие значения в быстрых переходных процессах с меньшей колебательностью;
выражение
∞
=∫
о является мерой количества энергии, используемой для управления, это штраф за энергетические затраты системы [14, 15].
От весовых матриц Q , R и N зависят ограничения соответствующих координат. Если какой-либо элемент этих матриц равен нулю, то соответствующая координата ограничений не имеет. На практике выбор значений матриц Q , R , N осуществляется методом экспертных оценок, проб, ошибок и зависит от опыта и знаний инженера-проектировщика.
Для решения таких задач в MATLAB имеются операторы
[K,S,E] = lqr(A,B,Q,R,N) и [K, S, E] = lqry(Ps,Q,R,N) , которые минимизируют функционалы (6), (7) по вектору состояния х или по вектору выхода y [16]. Модель объекта управления Рs = ss(A,B,C,D). Результатом расчёта является матрица К оптимальных обратных связей по переменным состояния х, решение уравнения Риккати S и собственные значения
Е = eig( A – BK ) замкнутой системы управления. Составляющие функционала Jx = х 0TP1 х о и Ju = х 0TP2 х о, где х0 – вектор начальных условий; P1 и Р2 – неизвестные матрицы, которые являются решением матричных уравнений Ляпунова [13]. Они находятся с помощью функций P 1 =lyap ( NN,Q ) и P 2 = lyap ( NN,K Т RK ) , NN =(A+BK)Т .
Рассмотрим синтез линейно-квадратичного регулятора, удовлетворяющего критерию (6) для объекта управления [7, 17], заданного в пространстве состояний матрицами:
-100
А = [143,678 0
-16,667 -195,402
1,046 0
2300 1 0 0
]; в = [ 0 ]; с =[0 1 0]; D = 0.
0 001
В качестве переменных состояния рассматриваются: х1 – напряжение преобразователя, В; х2 – ток двигателя, А; х3 – угловая скорость, с-1.
Это система ТП – ДПТ с НВ: двигатель Р ном = 30 кВт; U ном = 220 В; I ном = 147 А; ω ном = 157 с-1; ω 0 = 169 c-1; ω max = 187 c-1; момент сопротивления номинальный М ном = 150 Н*м; кратность пускового тока = 2; тиристорный преобразователь: U ном = 230 В; U y = 10 B; I ном = 300 А; кратность кратковременной перегрузки по току =1,2.
При решении задачи принимаем матрицу Q диагональной.
В результате моделирования установлено, что минимальные значения элементов матриц R = 84 , а Q = diag [0.01 0.01 0.01] . В этом случае наблюдается монотонный переходный процесс угловой скорости двигателя (рис. 1). При R = 840 Q = [0.01 0.01 0.01] переходный процесс (рис. 2) соответствует критерию МО. Расчет матриц Р1 и Р2 выполнен при х0 = [220 147 162].
Рис. 1. Переходные функции в системе управления при R = 84, Q = [0.01 0.01 0.01]. Jx = 697,8; Ju = 229,7
Peak amplitude: 23 Overshoot (%): 0.476 At time (sec): 0.399
System: Wq l/O:ln(1)toOut(1)
Settling Time (sec): 0.1
System: Wq
I/O: ln(1)to Out(1)
Final Value: 22.9
System: Wq
I/O: ln(1) to Out(3)
Peak amplitude: 17.6
Overshoot (%): 4.33
At tine (sec): 0.32
System: Wq I/O: ln(1)to Out(3) Final Value: 16.8
Рис. 2. Переходные процессы в системе управления при R = 840, Q = [0.01 0.01 0.01]. Jx = 1,25*103; Ju = 112,6
Overshoot (%): Inf At time (sec):
System: Wq
I/O: ln(1)to Out(3)
Settling Time (sec
Соответствующим выбором матриц R и Q можно уменьшить пусковой ток двигателя до допустимых значений, равных (2–2,5) I ном (рис. 3). Например, при R = 840 и Q = [0.01 0.88 0.01] его значение равно 292 А, а время переходного процесса при этих условиях – 1,57 с.
При моделировании использован программный код на языке MATLAB, представленный в листинге 1 (прил.).
Рис. 3. Переходные процессы при допустимом пусковом токе Jx = 2,05*104; Ju = 1,47*104
Во всех рассмотренных случаях обратные связи по напряжению и току являются отрицательными, а по скорости – положительными, что нежелательно по требованиям устойчивости. Кроме того, синтезированная система является астатической по заданию и статической по нагрузке. Поэтому рассмотрим синтез ПИ-регулятора в пространстве состояний с дополнительной переменной состояния х 4 – коэффициентом передачи интегратора [9, 10].
Исходную информацию представим в виде матриц:
=[
143,678 0
0 -16,667 1,046 0
-195,4020
] ; =[ 0 ] ; C =eye(4); D = 0.
Переходные процессы по заданию, соответствующие критерию МО, получены при R = 100, q 11 = q 22 = q 33 = 0.001 и q 44 = 200. На рисунке 4 представлены переходные процессы переменных состояния, подтверждающие астатизм системы по заданию и по нагрузке (листинг 2, прил.).
Для определения матрицы К в MATLAB есть две функции K=acker(A,B,s) и К = place (A,B,s) , где s – вектор-строка желаемых полюсов передаточной функции замкнутой системы управления. Первая команда может быть использована только для систем с одним входом по u при n≤5. Вторая не имеет таких ограничений, однако кратность полюсов не должна превышать ранг матрицы В [16]. Пример использования этих операторов приведен в листинге 3 (прил.).
Если задан диапазон изменений элементов матрицы К (многокритериальная задача оптимизации с ограничениями, задача достижения цели), её решение возможно с помощью функции
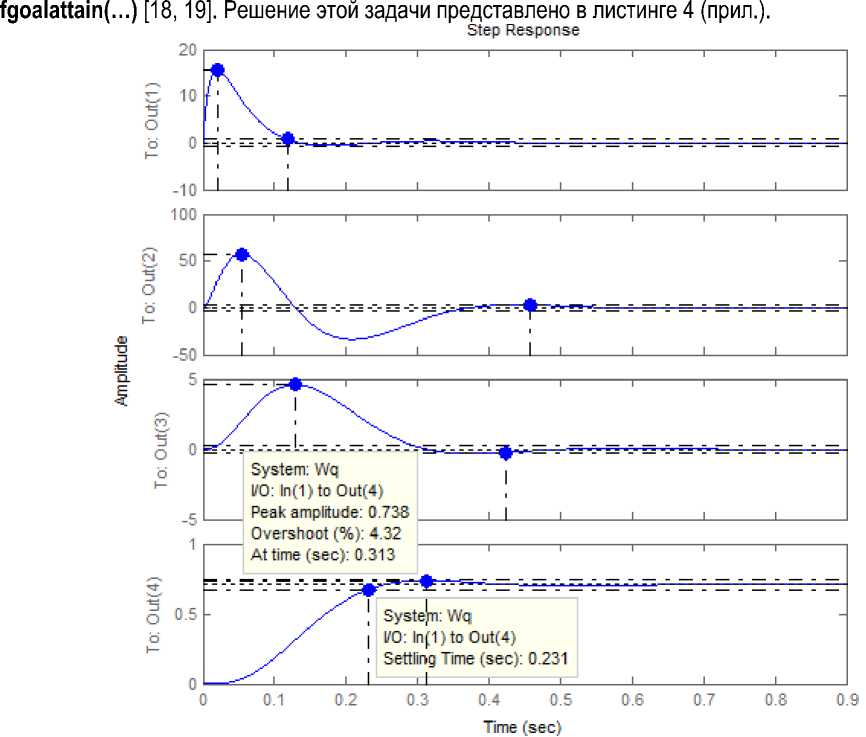
Рис. 4. Переходные процессы в системе с оптимальным LQR ПИ-регулятором
Выполним анализ полученных результатов путем сравнения динамических свойств трех систем управления: система с фильтром, регуляторы которой выбраны по критерию СО и МО; система с коррекцией по компромиссному оптимуму (регуляторы СО, МО, встречно-параллельная кор- рекция с выхода на вход реализована с помощью звена с передаточной функцией W(s) = 0,449(0,02s+1) и система с оптимальным LQR ПИ-регулятором. Структурные схемы этих систем в MATLAB+Simulink представлены на рисунках 5 и 6. На рисунках 7–10 показаны переходные процессы в рассматриваемых системах.
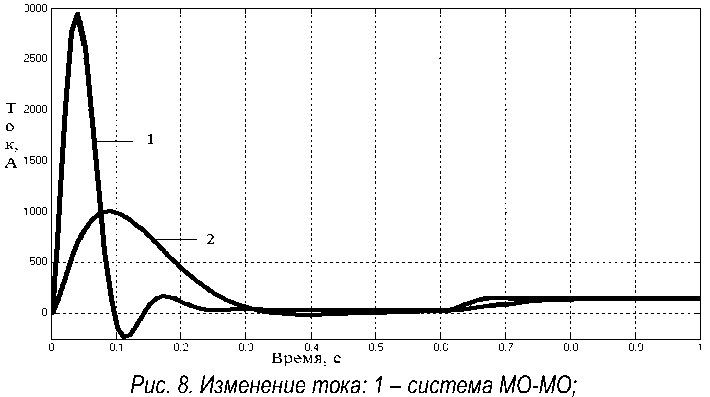
Очевидно, что система с оптимальными обратными связями более инерционна (рис. 7, 10) и имеет менее жесткую электромеханическую характеристику. В то же время переходный процесс соответствует теории МО, и она обладает внутренней устойчивостью по току якоря и напряжению источника питания (рис. 7–9, пусковой ток двигателя не более 2000 А, напряжение ТП не более 230 В). Из всех рассмотренных систем по результатам моделирования наилучшей по динамическим и электромеханическим свойствам следует считать систему компромиссного оптимума.
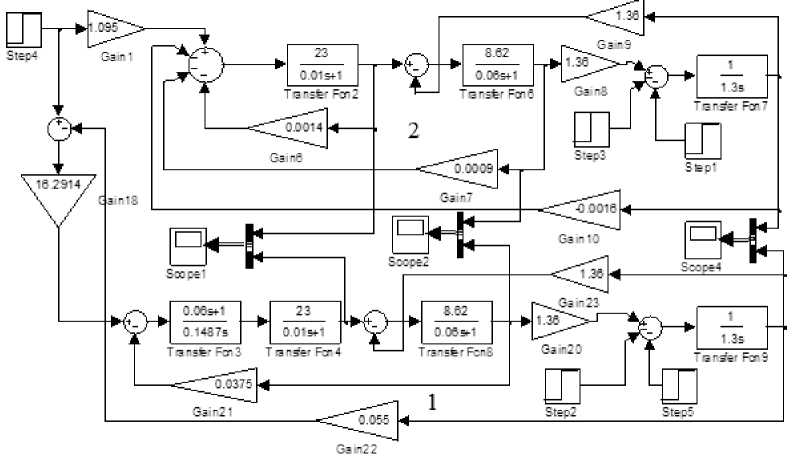
Рис. 5. Структурные схемы замкнутых систем управления: 1 – система с регуляторами МО-МО; 2 – система с оптимальными обратными связями
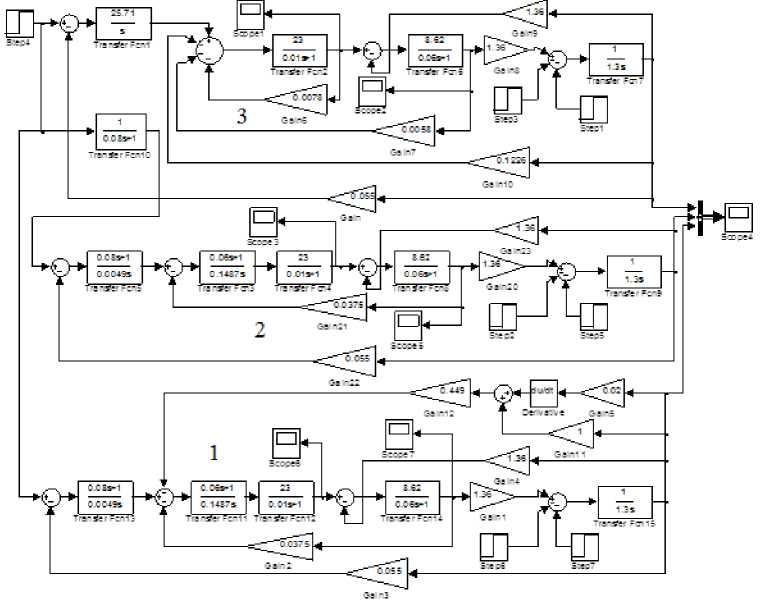
Рис. 6. Структурные схемы систем: 1 – система компромиссного оптимума;
2 – система СО-МО c фильтром; 3 – система с оптимальным LQR ПИ- регулятором
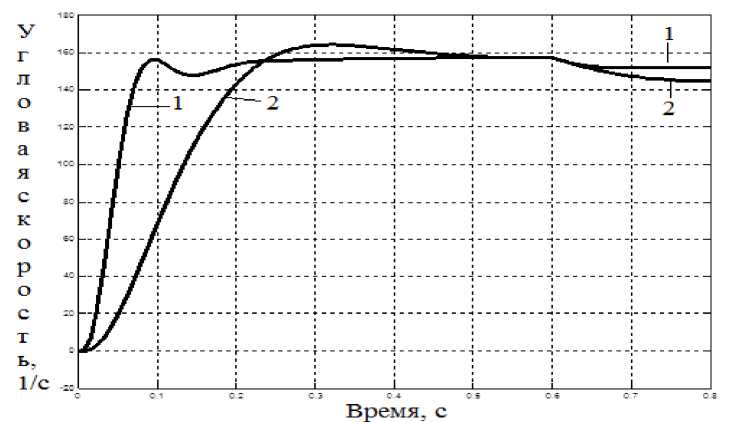
Рис. 7. Переходные процессы: 1 – система МО-МО; 2 – система с оптимальными обратными связями
2 – система с оптимальными обратными связями
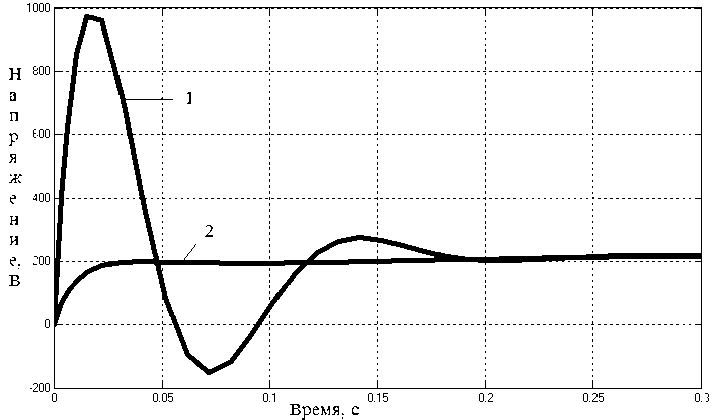
Рис. 9. Изменение напряжения преобразователя: 1 – система МО-МО; 2 – система с оптимальными обратными связями
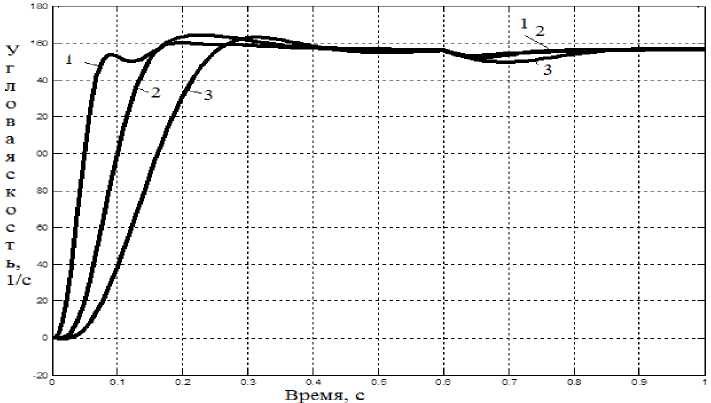
Рис. 10. Переходные процессы по скорости: 1 – система компромиссного оптимума; 2 – система СО – МО с фильтром; 3 – система с оптимальным LQR ПИ-регулятором
Выводы. На основании вышеизложенного делаем следующие выводы.
-
1. Критерии минимума расхода энергии на управление и максимального быстродействия являются базовыми, все остальные критерии являются следствием этих критериев.
-
2. Исследование объекта в пространстве состояний дает результаты, наиболее адекватные свойствам реального объекта управления (см. рис. 8 и 9).
-
3. Регуляторы, структура и параметры которых выбраны в пространстве состояний, учитывают действие обратной связи по ЭДС, хотя и уступают в быстродействии системам с регуляторами МО, СО и КО (см. рис. 4, 7 и 10).
-
4. Решение задач LQR-оптимизации позволяет рассчитывать коэффициенты жестких обратных связей, обеспечивающих критерий МО и прямой пуск двигателя без устройств плавного пуска (см. рис. 1, 2 и 3) как с ограничениями, так и без ограничений на вектор К .
В заключение следует отметить, что результаты моделирования нуждаются в проверке на реальных системах управления электромеханическими объектами.
Приложение
Листинги программ в MATLAB
Листинг 1
LQR- оптимальный синтез жестких обратных связей по переменным состояния
% Коэффициенты объекта
A=[-100 0 0;143.678 -16.667 -195.402;0 1.046 0];
B=[2300; 0; 0];
C=[1 0 0;0 1 0;0 0 1 ];
D=0;
% Матрицы весовых коэффициентов
R=840;
Q=[0.01 0 0;0 0.88 0;0 0 0.01];
% Синтез LQR-оптимального регулятора
[K,S,E]=lqr(A,B,Q,R)
% Вычисление составляющих функционала N=A-B*K;NN=N';
Wq=ss(N,B,C,D)
x0=[220; 147; 162];
Ct=C';
P1=lyap(NN,Ct*Q*C)
Kt=K';
x0t=x0';
Jx=x0t*P1*x0
P2=lyap(NN,Kt*R*K);
Ju=x0t*P2*x0
% Переходные процессы в системе step(Wq)
Синтез оптимального LQR ПИ-регулятора
A=[-100 0 0 0;143.678 -16.667 -195.402 0;0 1.046 0 0;0 0 1 0];
B=[2300; 0; 0;0];
C=[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1];
D=0;
R=100;
Q=[0.001 0 0 0;0 0.001 0 0;0 0 0.001 0;0 0 0 200];
[K,S,E]=lqr(A,B,Q,R)
N=A-B*K;NN=N’;
Wq=ss(N,B,C,D);
x0=[220; 147; 162; 0];
Ct=C’;
P1=lyap(NN,Ct*Q*C);
Kt=K’;
x0t=x0’;
Jy=x0t*P1*x0
P2=lyap(NN,Kt*R*K);
Ju=x0t*P2*x0
Wl=tf(Wq)
pole(Wl)
step(Wq)
Синтез оптимальных обратных связей
A=[-100 0 0 0;143.678 -16.667 -195.402 0;0 1.046 0 0;0 0 1 0];
B=[2300; 0; 0;0];
C=[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1];
D=0;
p=[-9.71+14.97i -9.71-14.97i -15.39 -99.72];
k=acker(A,B,p)
H=A-B*k;
Wss=ss(H,B,C,D);
step(Wss)
W=tf(Wss)
Листинг 2
Листинг 3
Листинг 4
Задача с ограничениями на вектор К
A=[-100 0 0;143.678 -16.667 -195.402;0 1.046 0];
B=[2300; 0; 0];
C=[1 0 0;0 1 0;0 0 1 ];
goal=[-99.67,-10.13+10.17i,-10.13-10.17i];
weight=abs(goal);
K0=[-0.002 -0.002 -0.002];
lb=repmat(-0.005,size(K0));
ub=repmat(0.005,size(K0));
options=optimset('Display','iter');
eigfun=@(K) sort(eig(A+B*K*C));
[K,fval,attainfactor,exitflag,output,lambda]=fgoalattain(eigfun,K0,goal,weight,[],[],[],[],lb,ub,[],options);
K eigfun(K)
attainfactor options=optimset(options,'GoalsExactAchieve',3);
[K,fval,attainfactor,exitflag,output,lambda]=fgoalattain(eigfun,K0,goal,weight,[],[],[],[],lb,ub,[],options);
K eigfun(K)
attainfactor
[Times,xvals]=ode45(@(u,x)((A+B*K*C)*x),[0,0.4],[220;147;162]);
plot(Times,xvals)
legend('x 1(t)','x 2(t)','x 3(t)','Location','best')
xlabel('t');
ylabel('x(t)');
Список литературы Критерии оптимального управления и LQR-оптимизация в электроприводе
- Интриллигатор М. Математические методы оптимизации и экономическая теория/пер. с англ. Г.И.Жуковой, Ф.Я. Кельмана. -М.: Айрис-пресс, 2002. -576 с.
- Осипов В.М., Кибардин В.В., Буралков А.А. Методы оптимизации в электротехнике: учеб, пособие/ГАЦМиЗ. -Красноярск, 2001.-156 с.
- Воронов А.Л. Основы теории автоматического управления. Ч. III. Энергия.-М., 1979.
- Автухов В.В. Метод отыскания оптимального и компромиссного законов управления объектами автоматического регулирования//Изв. вузов, Цветная металлургия. -1984. -№ 2. -С. 111-117.
- Математическая теория оптимальных процессов/Л. С. Понтрягин, В.Г. Болтянский, Р.В. Гамкрелидзе . -М.: Наука, 1969. -384 с.
- Кулаков Г.Т. Анализ и синтез систем автоматического регулирования: учеб, пособие. -Минск: УП “Технопринт”, 2003. -135 с.
- Ключев В.И. Теория электропривода: учеб, для вузов. -2-е изд. перераб. и доп. -М.: Энергоатомиздат, 1998. -704 с.
- Егоров В.Н., Шестаков В.М. Динамика систем электропривода. -Л.: Энергоатомиздат, 1983. -216 с.
- Кибардин В.В., Ковалева О.А., Язев В.Н. Исследование компромиссного оптимума в MATLAB//Вестник КрасГАУ. -2014. -№ 8. -С. 201-206.
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. -М.: Наука, 2002. -303 с.
- Дорф Р. Бишоп Р. Современные системы управления/пер. с англ. Б.И. Копылова. -М.: Лаборатория базовых знаний, 2002. -832 с.
- Филипс Ч., Харбор Р. Системы управления с обратной связью. -М.: Лаборатория базовых знаний, 2001 -616 с.
- Веремей Е.И. Линейные системы с обратной связью: учеб, пособие. -СПб.: Лань, 2013.-448 с.
- Егоров А.И. Основы теории управления. -М.: ФИЗМАТЛИТ, 2004. -504 с.
- Мирошник И.В. Теория автоматического управления. Нелинейные и оптимальные системы. -СПб.: Питер, 2006. -272 с.
- Перельмутер В.М. Пакеты расширения MATLAB. Control System Toolbox и Robust Control Toolbox. Сер. Библиотека профессионала. -М.: СОЛОН-Пресс, 2008. -224 с.
- Кибардин В.В., Буралков А.А. Синтез оптимальных обратных связей для электромеханических объектов//Вестник КрасГАУ. -2011. -№ 3. -С. 158-162.
- MATLAB R2010а. Multi-Objective Goal Attainment Optimization.
- Ким Д.П. Алгебраические методы синтеза систем автоматического управления. -М.: ФИЗМАТЛИТ, 2014.-164 с.
