Критерии сохранения управляемости автомобиля при экстренном торможении

Автор: Касимов О.К., Ражапова С.С.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Основной раздел
Статья в выпуске: 6-1 (73), 2020 года.
Бесплатный доступ
В статье рассматривается влияние типа плеча обкатки на сохранение устойчивости автомобиля при торможении при наличии неравномерности тормозных сил на передней оси. Также рассматривался управляющее воздействие водителя на курсовой угол и занос автомобиля. Предложено оценивать устойчивость автомобиля при торможении по величине курсового угла и бокового отклонения за время реакции водителя.
Короткий адрес: https://sciup.org/140252539
IDR: 140252539 | УДК: 004.02:004.5:004.9
Criteria for keeping the controllability of a car in emergency braking
The article considers the influence of the break-in shoulder type on maintaining vehicle stability during braking in the presence of uneven braking forces on the front axle. The driver’s control effect on the heading angle and the skid of the car were also considered. It is proposed to evaluate the stability of the car during braking by the value of the heading angle and lateral deviation during the reaction of the driver.
Текст научной статьи Критерии сохранения управляемости автомобиля при экстренном торможении
Resume: The article considers the influence of the break-in shoulder type on maintaining vehicle stability during braking in the presence of uneven braking forces on the front axle. The driver’s control effect on the heading angle and the skid of the car were also considered. It is proposed to evaluate the stability of the car during braking by the value of the heading angle and lateral deviation during the reaction of the driver.
Как известно, углы кинематического разворота управляемых колес находятся из уравнения:
Jc e n + 2 + de + On где: Jc - приведенный момент инерции управляемых колес автомобиля и деталей рулевого управления относительно оси поворота колеса;
I n - момент, обусловленный качением шины с уводом и продольным наклоном оси поворота колеса;
I 2 - приведенный момент вязкого трения;
I de - приведенный момент упругости рулевого управления;
I O n - момент, обусловленный разностью тормозных сил на управляемых колесах.
При торможении с зафиксированным рулевым управлением ( 0 е = 0 ) угол поворота рулевого колеса и его производная принимаются равными нулю, поэтому моменты трения и упругости рулевого управления можно не учитывать.
Момент от действия боковых сил и продольного наклона оси поворота колеса:
I c = N1 • re • sin e где: β - угол продольного наклона оси поворота колеса;
r e - радиус качения колеса.
Момент обусловленный разностью тормозных сил на управляемых колесах равен:
I 6c = (В^ - Вб,) • а где: е - плечо обкатки колеса.
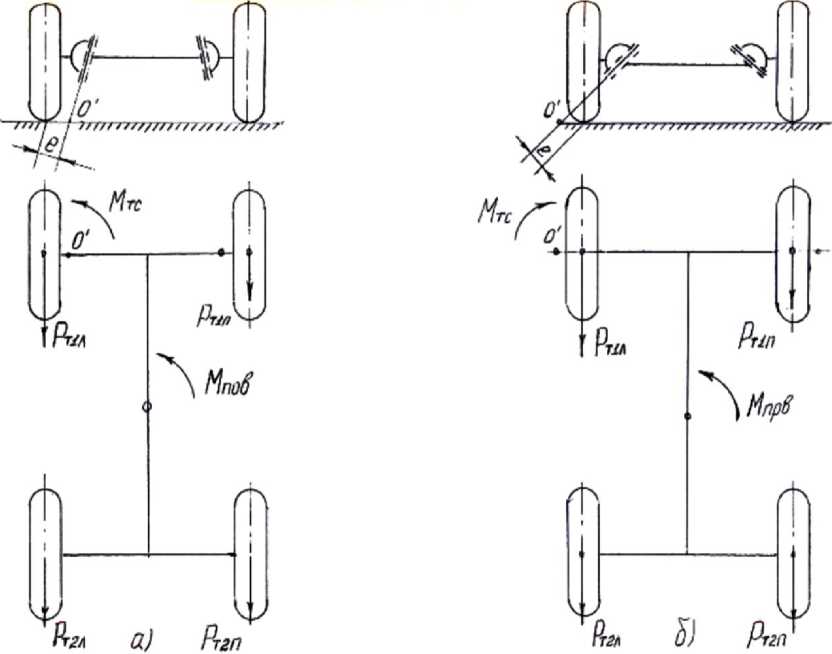
Рис.1.Схема действия моментов Мпов и МТС при положительном (а) и отрицательном (б) плечах обкатки
Как видно из рис.1, при отрицательном плече обкатки, момент I qc , вызванный неравномерностью тормозных сил на передней оси, несколько компенсируется за счет разнонаправленности I б с и автомобиль сохраняет устойчивость при более значительной разнице тормозных сил на передней оси.
Торможение с высокой начальной скорости при наличии неравномерности тормозных сил, может привести к неуправляемому заносу, для которого характерна сложная траектория движения автомобиля. Оценка устойчивости по конечным значениям углов разворота автомобиля и его боковым отклонениям при этом невозможна.
Кроме того в реальной ситуации водитель в случае заноса автомобиля, как правило пытается исправить траекторию при помощи рулевого управления, однако делает он это не в момент начала заноса, а через определенный интервал времени, называемый временем реакции водителя. Для того, чтобы маневр водителя был успешным, необходимо, чтобы курсовой угол автомобиля к концу данного промежутка времени не превысил критического значения, после которого наступает неуправляемый занос. В связи с этим целесообразно оценивать устойчивость по величине курсового угла и бокового отклонения за время реакции водителя. Чтобы определить его величину необходимо рассмотреть его составляющие.
Прежде чем водитель сможет скорректировать траекторию движения он должен быть информирован об отклонении автомобиля от курса. Эта информация может быть получена тремя возможными способами:
-
- визуально ;
-
- через действующее на тело водителя боковое ускорение;
-
- через окружную силу на рулевом колесе.
Для водителя чаще всего наиболее ощутимы изменения курсового угла и поперечные ускорения возникающие через 0,4...0,6 с от начала торможения. Это информационное время складывается с собственным временем реакции, составляющим 0,3...0,5 с. Время необходимое для поворота управляемых колес, включающее в себя время запаздывания и срабатывания рулевого привода достигает 0,2... 0,3 с. Итого общее время необходимое для информации, реакции водителя и срабатывания рулевого привода, находится в пределах 0,9...1,6 с. Для краткости в дальнейшем весь этот промежуток времени именуется временем реакции водителя. Поскольку приведенный диапазон значений его достаточно широк и требовал конкретизации, были выполнены экспериментальные исследования, в ходе которых установлено, что среднее значение его равно 1,24 с, а максимальное 1,5 с. В расчете на водителя с наихудшей реакцией, время реакции водителя принято равным 1,5с.
Для оценки сохранения управляемости автомобиля в конце рассмотренного промежутка времени в математическую модель введена функция управляющего воздействия водителя, имитирующая следующий алгоритм его действия. При возникновении поперечного смещения, сопровождающегося ростом угловой скорости разворота, водитель начинает поворачивать рулевое колесо. При этом он стремится точку, находящуюся на продолжении продольной оси автомобиля совместить с осевой линией коридора движения так, чтобы вектор скорости этой точки (называемой в теории управляемости и устойчивости автомобиля "направляющей точкой") совпадал с осью коридора. Если направляющая точка расположена на расстоянии "В" от центра масс автомобиля, вектор скорости этой точки выраженный через координаты движения автомобиля имеет вид:
y =l • Уд - о•Уд
где: y{ - вектор скорости направляющей точки l - расстояние от центра масс до направляющей точки
Управляющее воздействие в этом случае можно представить в виде:
0;
t ^ t да t >t да
-(0 ё + ^ - ^ 1 ; I v
Угловая скорость поворота рулевого колеса ограничивается возможностями водителя и в экстренных ситуациях составляет 250…350 град/с. В расчетах принимается среднее значение равное 300 град/с. В случае задания траектории передней оси функция управляющего воздействия заметно упрощается и имеет вид
' 0;
_— ( ^ 1 + У д );
t ^ t да
t > t
да
При изменении l в пределах 15…20 м, оба способа дают практически одинаковые результаты. Поэтому применительно к исследуемым условиям целесообразно остановиться на втором способе задания управляющих воздействий, считая заданной траекторию движения передней оси автомобиля.
Приведенная функция использовалась для проверочных расчетов тех вариантов, в которых значение курсового угла в момент времени t рш превышало 10°. Если при введении функции управляющего воздействия водителя курсовой угол уменьшался, то занос считался управляемым.
Список литературы Критерии сохранения управляемости автомобиля при экстренном торможении
- Топалиди В.А., Касымов O.K. Имитационная модель процесса торможения легкового автомобиля. Труды ТАДИ, Ташкент, 2004.
- Касымов O.K., Топалиди В.А. Особенности нормирования показателей устойчивости при торможении легковых автомобилей. Труды МНТК,том 2, Ташкент, 2006, С.106..108.
