Лесозаготовки: взгляд в будущее

Бесплатный доступ
Рассмотрены пути развития техники и технологии лесозаготовок начиная с половины прошлого века до настоящего времени и выдвинуты предпосылки появления новых технологий.
Лесозаготовка, валка трелевка, дерево, харвестер, манипулятор, форвардер, аэростат, вертолет, дирижабль
Короткий адрес: https://sciup.org/147112122
IDR: 147112122
Текст научной статьи Лесозаготовки: взгляд в будущее
Работы финских исследователей [1] показывают, что пути развития лесозаготовок состоят из следующих этапов: первый - до 1960 г. (валка леса ручными пилами и топором, трелевка - гужевая), второй - 1960-1980 гг. (валка леса бензомоторными пилами, трелевка - общепромышленными тракторами), третий - с 1980 г. по настоящее время (валка - харвестерами, трелевка - форвардерами) [2].
Начиная со второго периода интенсивно велись работы по созданию новой техники - харвестеров (лесозаготовительных комбайнов). Период создания и освоения этой машины составляет около 30 лет, в течение которых харвестеры совершенствовались и стали надежными. Сегодня в мире существуют многие компании, производящие эти машины («Тимберд-жек», «Валмет», «Понсе», «Катерпиллер» и другие). В Республике Коми в настоящее время эксплуатируется около 100 харвестеров и форвардеров, число их увеличивается с каждым годом.
Ведутся работы по дальнейшему совершенствованию этих машин, особенно в плане повышения их проходимости и надежности. Компания «Тимберджек» создала первые образцы шагающего харвестера. Этот харвестер перемещается на ногах-рычагах, имеет механизм по сохранению равновесия в разных положениях. Особый интерес представляет харвестер компании «Катерпиллер» [3]. Его отличие от шагающего харвестера: способность преодолевать преграды за счет изменения клиренса путем подъема осей колес.
Автор - профессор кафедры технологии деревообрабатывающих производств
Можно предположить, что дальнейшее развитие лесозаготовок будет базироваться на летающих машинах. Финский исследователь и конструктор Эркки Каре [1] выдвигает смелую версию - летающие лесозаготовительные машины (рис. 1) (они кажутся не реалистичными, а фантастическими). При этом он утверждает, что «в настоящее время можно управлять машиной на расстоянии» [1].
Таким образом, можно констатировать, что близка к созданию система по дистанционному управлению харвестером, или, точнее, система по дистанционной наводке захватно-срезающего устройства манипулятора на ствол дерева.
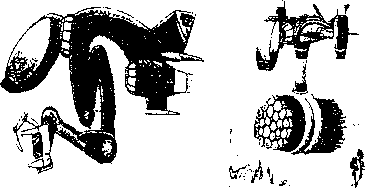
Рис. 1. Летающие лесозаготовительные машины
Необходимо отметить, что в советское время в нашей стране много сделано в научном плане по применению вертолетов, аэростатов, дирижаблей в лесном деле, выдан ряд авторских свидетельств на устройства с применением аэростатов и дирижаблей на лесозаготовках [4, 5, 6]. В Гузерпильском леспромхозе (Северный Кавказ) филиал ЦНИИМЭ провел опытные заготовки леса с помощью вертолета. Были получены положительные результаты, кроме себестоимости заготовок, - она была высокой. Способом, снижающим себестоимость заготовок леса, может стать применение дирижаблей.
В Республике Коми в 1965 г. создана группа содействия дирижаблестроению. Председателем группы был избран Парков Л. В. - сотрудник Сыктывкарского аэропорта. Группа разработала техникоэкономическое обоснование применения дирижаблей в различных отраслях промышленности и показала экономическую целесообразность этого предложения. Аналогичные группы содействия были созданы в городах Москве, Ленинграде, Нижнем Тагиле, Иркутске и Новосибирске. В марте 1965 г. состоялась первая Всесоюзная конференция по дирижаблестроению и применение дирижаблей в СССР, которая наметила основные пути развития применения дирижаблей в народном хозяйстве. На рисунке 2 [4] показан лесопромышленный робот ЛПЛ-2. Он снабжен аэростатами 1, соединенными между собой балкой 2, к которой в двух точках прикреплен несущий канат 3. На балке с помощью поворотного круга 4 установлен манипулятор 5 с захватно-срезающим устройством. С одной стороны на несущем канате 3 расположена поворотная каретка 7 с опорным блоком 8, через который пропущен тягово-несущий канат 9. На несущем и тягово-несущем канатах навешена кассета 3. В верхней части балки расположен энергосиловой привод манипулятора 11 с двигателем внутреннего сгорания.
жаблем к нижнему складу на расстоянии 50-100 км со скоростью 50 км/ч.
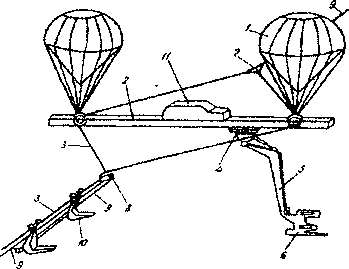
Рис. 2. Лесопромышленный робот для валки и трелевки деревьев ЛПЛ-2
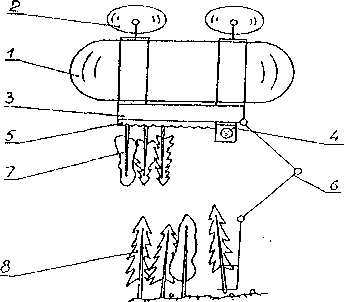
Рис. 3. Дирижабль для трелевки леса
Работает робот следующим образом. Аэростаты поднимают балку с манипулятором, поворотной кареткой, несущим и тягово-несущим канатами. Высота подъема аэростатов и их положение в полете регулируется натяжением несущего и перемещением тягово-несущего канатов. Манипулятор с помощью маневров на балке и разворотом на поворотном круге сверху захватывает дерево, срезает его захватно-срезающим устройством и укладывает в кассету. Цикл срезания и укладки дерева в кассету повторяется до тех пор, пока в ней не сформируется пачка из 3-4 деревьев. Затем тягово-несущий канат приводится к месту разгрузки, где они освобождаются из кассеты.
Однако в последние годы из-за бурного развития космонавтики, военной техники, а позже и смены общественно-политической формации в стране дальнейшие работы по применению дирижаблей в лесном деле значительно сузились, хотя продолжаются вестись [б].
Имеющаяся информация и первые результаты настоящих исследований позволяют обосновать предпосылки создания лесозаготовительной машины на базе дирижабля. Дирижабль (от франц, dirigeable -управляемый) - управляемый аэростат с движителями.
На рисунке 3 изображена схема дирижабля для трелевки леса. Он представляет собой корпус -оболочку 1 наполненный газом, вертолетные движители 2, грузовую траверзу 3 с автоматическими захватами, кабину 4 пилота - оператора, манипулятор 5 с наводящим и захватно-срезающим устройствами.
Сваленные деревья, закрепленные в захватно-срезающей головке, поднимаются манипулятором и подвешиваются на грузовую траверзу, закрепляются на ней автоматическими захватами. Деревья в значительных объемах (около 100 т) перемещаются дири
Применять дирижабли на лесозаготовках можно в различных вариантах: 1) как валочную машину и транспортное средство, 2) как транспортное средство для перемещения деревьев, хлыстов и сортиментов, 3) как транспортное средство для перемещения «наземных» харвестеров, форвардеров и перевозки людей на места заготовки леса. Могут быть и другие варианты.
В настоящее время в связи с резким падением объемов лесозаготовок в Республике Коми граница лесосечных работ сместилась на Севере в южном направлении на 100 км. Это обстоятельство и отсутствие надлежащих дорог подчеркивают особое значение применения аэростатических аппаратов на лесозаготовках.
Бесспорно также экологическое значение заготовки леса «с воздуха».
Список литературы Лесозаготовки: взгляд в будущее
- Уускоски Т. Летающие лесозаготовительные машины?/Т. Уускоски//Timberjack News: Международный журнал по лесозаготовительной технике. 1999. № 2.
- Герасимов Ю. Ю. Экологическая оптимизация технологических процессов и машин для лесозаготовок/Ю. Ю. Герасимов, В. С. Сюнёв. ЙОЭНСУУ, Финляндия, 1998.
- Проспекты компании «Caterpiller». Страна -США, Канада. -2000.
- Занегин А. А. Роботизация в лесной промышленности: обзор. Информ/А. А. Занегин. М.: ВНИПИЭИлеспром, 1985.
- Чупраков А. Н. Аэростаты и дирижабли на лесозаготовках/А. Н. Чупраков//Лесная промышленность. 1989. № 10. С. 11.
- Толстоногов Э. Ю. О перспективе применения аэростатических летательных аппаратов в лесном комплексе/Э. Ю. Толстоногов//Лесная промышленность. 2004. № 1. С. 34-37.
