Математическая модель баллистического летательного аппарата с переменными массогеометрическими характеристиками

Автор: Федоров Виктор Борисович
Рубрика: Расчет и конструирование
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Представлена динамическая модель осесимметричного баллистического летательного аппарата с переменными массогеометрическими характеристиками. Летательный аппарат представлен как система двух тел с возможностью их взаимного перемещения.
Баллистический летательный аппарат, динамическая модель, массогеометрические характеристики
Короткий адрес: https://sciup.org/147151640
IDR: 147151640 | УДК: 629.76
Mathematical model of ballistic vehicle with variable inertial parameters
Dynamic model of symmetrical ballistic vehicle with variable inertial parameters is offered. Vehicle has two parts - platform and payload.
Текст научной статьи Математическая модель баллистического летательного аппарата с переменными массогеометрическими характеристиками
Движение летательных аппаратов (ЛА) в атмосфере определяется гравитационным полем Земли, воздействием набегающего атмосферного потока на наружную поверхность (НП) ЛА, массогеометрическими характеристиками (МГХ) ЛА – массой, координатами центра масс (ЦМ), значениями осевых и центробежных моментов инерции. Геометрические характеристики НП ЛА, взаимное расположение конструктивных элементов и составных частей ЛА определяются в конструкторской документации и описываются в конструкторской системе координат (КСК). В частности, для баллистических ЛА (БЛА) начало КСК помещают в точке O (рис. 1), положение которой привязано к конструктивным элементам летательного аппарата (например, лежит в плоскости одного из шпангоутов и является центром окружности расположения осей базирующих штифтовых отверстий). Ось OXo (рис. 1) КСК направлена к носку БЛА и перпендикулярна плоскости базового шпангоута, ось OYo перпендикулярна оси OXo и расположена в плоскости ориентации I–III БЛА, ось OZo дополняет тройку осей до правой. Для рассматриваемого класса БЛА номинальное положение оси OXo КСК совпадает с осью симметрии его наружной поверхности.
В процессе изготовления летательного аппарата возникают случайные отклонения геометрических характеристик НП и МГХ БЛА от заданных в конструкторской документации значений. Во время полета в результате взаимодействия с высокоскоростным, высокотемпературным атмосферным потоком возможно изменение геометрии НП и МГХ БЛА.
Отклонение реальных параметров БЛА от их допустимых диапазонов значений во время движения может привести к формированию возмущенной траектория полета БЛА.
IV
O
O
XG
G
I
C
Y G
Z G
X C
P
C
Z P
Y P
XP
Рис. 1. Основные системы координат, используемые для построения математической модели
Математическая модель БЛА с переменными МГХ
Рассмотрим модель БЛА как систему двух тел, имеющую внутренние связи и допускающую взаимные перемещения тел, входящих в нее. В качестве первого тела (платформы) примем корпус БЛА, в качестве второго - полезный груз (ПГ).
Начало связанной с БЛА опорной системой координат (ОСК) - полюс P совпадает с номинальным положением ЦМ БЛА, заданным в КСК OX o Y o Z o . Направление осей ОСК совпадает с номинальным направлением осей КСК БЛА. В ОСК определена главная центральная система координат (ГЦСК) БЛА CX c Y c Z c , где C - центр масс БЛА. Движение полюса P рассматривается в инерциальной, геоцентрической СК GX G Y G Z G (рис. 1). Угловое расположение ОСК, связанной с корпусом ЛА, относительно СК GX G Y G Z G задается тремя углами Крылова (тангажа ф , крена П и рыскания ^ ).
Для независимого изменения всех МГХ изделия в сборе второе тело ПГ может изменять положение относительно платформы по трем линейным и трем угловым координатам. МГХ и аэродинамических характеристик (АХ) корпуса БЛА могут медленно меняться в полете в небольших пределах. Оценка закона изменения МГХ и АХ корпуса БЛА во время полета может быть получена на основании зависимостей, приведенных в [2].
В общем случае, для получения уравнений движения системы твердых тел можно использовать уравнения Лагранжа второго рода. В частности, такая процедура применяется при выводе уравнений движения механических систем роботов-манипуляторов [4]. В случае системы, состоящей из двух тел, имеющих в сумме двенадцать степеней свободы, математическая модель будет включать сорок восемь дифференциальных уравнений, определяющих траекторию движения системы. Для изучения точных моделей сложных систем тел с изменяющимися МГХ целесообразно использовать специализированные системы анализа динамики механических систем, такие как АДАМС, «Универсальные механизмы» и другие. Однако эффективность работы таких инструментов зависит от корректности определения начальных, граничных условий задачи, диапазона изменения параметров модели.
Для получения необходимых предварительных оценок воспользуемся подходом, описанным в [1], где для изучения поведения БЛА с медленно меняющимися МГХ используются уравнения движения свободного твердого тела.
Нормальная форма Коши системы уравнений (при условии независимости главного вектора и главного момента внешних сил от линейного и углового ускорений) может быть записана в матричной форме:
VP = — £ F ( j ) - Q V P - П 2 р + P ( J ( O ) + m P 2) - 1 x [ ^ m Pj ) - P ^ F ( j ) - Q J ( O) n + M PQ 2 р ]
, M j j j (1)
n = (J(P) + mP2)-1[£MPj) -P^ f(j) -QJ(O)Q + MPQ2р], j j где m - масса летательного аппарата, VP = [vPx, vPy, vPz ]r - вектор линейной скорости полюса P ОСК, VP = [vPx, vPy, vPz ]т - вектор линейного ускорения полюса P ОСК, F(j) = [F^j), Fj), F^j) ]T -главный вектор внешних аэродинамических сил, действующих на НП БЛА. Главный момент внешних аэродинамических сил, действующих на наружную поверхность БЛА, обусловленный асимметрией формы его НП и несовпадением точек ЦМ и центра давления, -MPj) = [mPX^, mP,), mP)]r . Вектор угловой скорости БЛА в ОСК - n = [nx, ny, nz ]r (nx = n, ny = £, nz =ф), где n, £, ф- углы ориентации ОСК БЛА относительно осей GXGYGZG. Вектор углового ускорения БЛА в ОСК - n = [nx,ny,nz]r. Угол атаки БЛА - ап =^2 +ф2 . Вектор положения ЦМ БЛА в его ОСК - р = [рx, рy, рz ]r,
Расчет и конструирование
-и Z
и
y
О_
и Z
0 -и x
– матрица компонентов вектора угловой скорости БЛА,
- И у
и
x
-Р Z
Р у
Р= Р z
0 -р x
– матрица компонентов вектора положения ЦМ в КСК,
-
Р у
Р x

( P ) Jyx

- J (PP )

( P ) Jyz
- J ZP )
J ( P ) =
– тензор инерции БЛА в КСК.
^^^^^^в
Левые части уравнений (1), а именно линейные и угловые ускорения определяются соотношением внешних силовых факторов, линейными и угловыми скоростями, а так же МГХ БЛА, записанными в правых частях уравнений. Возникающие отклонения аэродинамических сил и моментов БЛА от их проектных значений могут компенсироваться изменением МГХ и кинематических параметров БЛА. При этом левые части уравнений (1) могут сохранять проектные значения, что обеспечит движение по заданной траектории. В частности, в работе [5] рассматривается возможность использования разности смещений аэродинамического фокуса и ЦМ для определения эффективных плеч аэродинамических сил относительно оси вращения по крену.
Эта особенность законов движения ЛА используется на практике, в частности, в ЛА с «балансирной» схемой управления (дельтапланы, парапланы). Известны также схемы управления движением БЛА путем изменения продольной координаты его центра масс в сочетании с созданием управляющих аэродинамических моментов с помощью газодинамических рулей. Во всех этих схемах специальными способами, заложенными в конструкции ЛА, изменяется взаимное положение центра масс ЛА и точки приведения главного вектора аэродинамических сил.
Дополним уравнения (1) выражениями, определяющими МГХ системы, через МГХ составляющих ее тел. Прежде всего, определим дополнительные системы координат (рис. 2) – подвижную относительно ОСК главную центральную систему координат (ГЦСК) ПГ LX lYl Zl и неподвижную относительно ОСК, ГЦСК корпуса KXkYkZk .
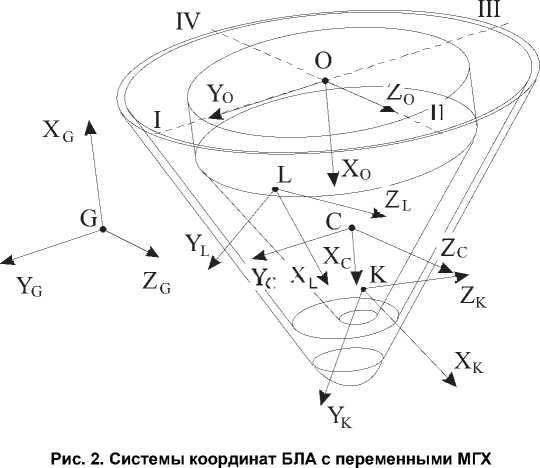
Положение ГЦСК ПГ и корпуса относительно ОСК заданы углами Крылова ф l , n l , ^ l , Ф к, n к, ^ к и векторами р к, р l , определяющим положение точек ЦМ L и K в ОСК. Положим, что вследствие малости возникающих на этапе производства и во время полета асимметрий распределения массы в ОСК, возможные потребные перемещения ПГ относительно корпуса малы. Обозначим также: M k , M l - массы корпуса и ПГ, M = M k + M l - масса изделия в сборе, J ( к ) , J ( l ) - тензоры инерции корпуса и ПГ в ОСК, J ( p ) - тензор инерции летательного аппарата в ОСК. Кроме того, определим следующие ограничения: J Yир = JZup , J Xир < 0,1 JZ ир , |8 J | < 0,01 J П .
Тензоры инерции J ( p ) , J ( к ) , J ( l ) БЛА, корпуса и ПГ относительно ОСК, по теореме Гюйгенса-Штейнера [1, 3] определяются формулами:
J ( p ) = AT T J ( С ) А с + M ( E р с 2 -р с р с ) ;
J ( к ) = A T J ( K ) А . + Mk ( E р к 2 -р к р к ) ;
J(1) = ATJ(L) А, + Mi (E р i2 -р i р i), где J(С), J( p )- тензоры инерции БЛА в ГЦСК и ОСК соответственно, рс = [хс, Ус, zc ]T - радиус-вектор точки С ЦМ БЛА в ОСК,
J(K), J(к \ J(L), J(1 ’- тензоры инерции корпуса и ПГ в ГЦСК и ЦСК соответственно, рк = [xk, ук, zk ]т , рl = [xl, yl, zl ]T - радиус-векторы точек K и L ЦМ корпуса и ПГ в ОСК, р2 = x2 + У2 + Z2, рк = xk + Ук + zk, р2 = x2 + У2 + z2 - скалярные квадраты, рсрс, рi рi, ркрк - диадные произведения,
Ас, Ак, Al - матрицы преобразования координат БЛА, корпуса и ПГ из ЦСК (оси которых параллельны осям ОСК) в ГЦСК, составленные из направляющих косинусов осей, соответствующих ГЦСК в ЦСК, которые являются функциями трех углов Крылова ф,n,^, Фк, nк, ^к, Фl,Пl, ^l:
|
( c |
c |
c |
k |
k |
k |
l |
l |
l |
|||
|
a 11 |
a 12 |
a 13 |
a 11 |
a 12 |
a 13 |
a 11 |
a 12 |
a 13 |
|||
|
А = |
c a 21 |
c a 22 |
c a 23 |
, А к = |
ak 21 |
O ’ 22 |
a ’ 23 |
, A l = |
l a 21 |
l a 22 |
l a 23 |
|
c |
c |
c |
k |
k |
k |
l |
l |
„ l |
|||
|
( a 31 |
a 32 |
a 33 J |
( a 31 |
a 32 |
a 33 J |
( a 31 |
a 32 |
a 33 J |
Радиус-вектор центра масс р с изделия в сборе может быть определен, как функция радиус - сс с a 11 = 1 a 12 = ф, a 13 = -^ , ас21 = -Ф, ас22 = 1, ас23 = n , сс с a 31 = ^, a 32 = -Л, a 33 = 1.
ak 11 = 1, a" 12 =Фк, a" 13 = ^к ’ kkk a 21 = -Фк, a 22 = 1, a 23 = nк, a 31 = ^к, a 32 = -nк, a 33 = 1.
a l 11 = 1, a l 12 = Ф l , a l 13 = -^ l , a 21 = - Ф l , a 22 = 1, a 23 = n l , a 31 = ^ l , a 32 = - n l , a 33 = 1.
векторов центров масс в ОСК и масс, составляющих изделие элементов:
|
M |
M |
M |
M |
MM |
M Zc =-- Lzk M k 0 0 |
M + —L Z/ M l |
|
рс = -р! + — р>, или x =—- MkMl M Тензор инерции БЛА, корпуса и Г J xС ) 0 0 1 |
х к + — x ,, yc = —- у , +—- У; , kMl MkMl 1Г в их ГЦСК соответственно: J xK ) 0 0 1 Г J xL ) |
|||||
|
J ( С ) = 0 0 |
J УС ) 0 |
0 , J ( K ) = J ZС ) j |
0 J yK ) 0 0 |
0 , J ( L ) = 0 J ZK ) j [ 0 |
J yL ) 0 0 J zL ) _ |
. |
Вследствие малости величин углов ф , n , ^ , ф к , n к , ^ к , Ф l , n l , ^ l (менее 5 градусов), выражения для компонент матриц преобразования координат можно упростить [1]:
Выражения для компонентов тензоров инерции БЛА, корпуса и ПГ в их соответствующих ЦСК с учетом допущений также существенно упростятся: Jс x = JС X , Jсy = JC Y , Jсz = JСZ ,
J xy = Ф ( J С X - J ^Y ) , J xz =^ ( J С Z - J С X ) , J yz = n ( J С Z - J CY ) ,
Расчет и конструирование lLlLlLl x - J X, J у - J Y, J z - J Z, J xy
-ф l ( J LX - J LY ) , J lxz “£ I ( J LZ - J LX ) ,
lLLкКкКкКкКК
J yz -n l ( J Z J Y ) , J x - J X , J y - J Y , J z - J Z , J xy -ф к ( J X J Y ) ,
J к xz - ^ к ( J К Z - J К X ) , J к yz - П k ( J К Z - J KY ) •
Выражения для J ( p ) , J ( 1 ) , J ( к ) , M ( E p с 2 -p с p с )
M k ( E P k 2 - P k P k ) , M l ( E P l 2 - P l P l )
можно
представить в виде:
J L
-ф l (JL
J LY )
ф l ( J LX J LY )
J L
-^ l ( jLz
'Пl ( JLZ - JLY )
J P
-I
■ Ф (JP
J PY )
J ( p ) -
-ф
( JPX - J PY )
J
P
Z
-n
( JPZ - JPY )
J К
-ф к ( JК
J
К
-Ф к
J К Y )
J
-
- 5 l ( J Lz - J LX )
-
- nl ( JLZ - JLY ) ;
j LZ .
-
- ^ ( J PZ - J PX )
-
- n (JPZ - JPY ) ;
J PZ .
Y ) ^ к ( J К z - J К X )
-
- n к ( J К Z - J К Y )
-^к (J ГZ - JГX ) -n к ( JКZ - JК Y )
К
Z
M ( E P с 2 -P с P с )-
M ( У с 2 + z c ) - M xc yc - M xc zc
- M xc yc - M xc zc
M ( x c + z c ) - M У с z c ;
2 2\
- M с yc , zcM с ( x c + yc )
Mk ( EP k 2 -P k P k )-
Ml ( E P l2 -P l P l )-
M k ( У к 2 + z 2 - M k X к Ук
- M k x k zK
Ml (y2 + zf)
- Mlxiyi
- M l x l z l
) - M k x K У к - M k x K z K
M k ( x 2 + z 2 ) - M k y K z K
-
- M k y K , z K M k ( x 2 + y k )
-
- M l x l y l - M l x l z l
2 2
M l ( x l + z l ) - Miyizi •
2 2
- M l y l , zl M l ( x l + y l )
Тензор инерции J ( p ) БЛА в его ОСК может быть определен через тензоры инерции ПГ J ( l ) и корпуса J ( K ) , в соответствующих ГЦСК, по следующей зависимости:
j ( p ) - A T j ( K ) Ak + M k ( e p k 2 -p k p k ) + A T j ( l ) A l + M l ( e p i 2 -P i p i ) .
Компоненты J ( p ) , а именно J xy ( p ) , Jxz ( p ) , Jyz ( p ) , могут быть записаны в виде:
Jxy ( p ) - ф ( jPX - JPY ) + M x c yc - ф l ( jlX - jlY ) + ф к ( JКX - JКY ) + M k x kук + Mlxl yl ;
Jxz ( p ) - ^ ( JPZ - JPX ) + M x c zc - ^ l ( jlZ - jlX ) + ^ к ( JКZ - JКX ) + MkxK zK + M l x l zl ;
Jyz ( P ) -n ( JPZ - JPY )+ M y c z c -n l ( jlZ - jlY ) + n K ( JКZ - JКY ) + M k y K z k + Mlylzl •
Положим, что на начальном участке движения в атмосфере БЛА не имеет асимметрий формы НП и МГХ. Такое состояние достигается высокоточной обработкой НП БЛА и проведением коррекции МГХ изделия на специализированном оборудовании относительно прогнозируемого направления равнодействующей вектора аэродинамических сил. В результате выполнения этой процедуры все МГХ БЛА имеют допустимые значения. В «идеальном» состоянии БЛА войдет в атмосферу с близкими к нулю углами атаки, что обеспечит ему на начальном участке траектории малые значения угловых скоростей и угловых ускорений вдоль поперечных осей координат. По мере нарушения симметрии НП, отклонения параметров НП и МГХ изделия будут постепенно нарастать, симметрия обтекания нарушится и изделие приобретет угловые тлx, таy, таZ и линейные VPx, VPy, VPz ускорения. В течение достаточно малого интервала времени ускорения не приведут к значительному изменению линейных и угловых скоростей VPz , VPy, таx, таy , таZ. Запишем упрощенные выражения, связывающие вторые производные параметров движения и МГХ БЛА, с учетом особенностей движения изначально «симметричного» изделия, пренебрегая таyтаx, таyтаz , таxтаz , та2, та2, таy , таyVPZ , таZVPy, таxVpz
сти и полагая J P = J P yz
P
z
, та xVPy как величинами второго порядка мало- 1 = J - JP\ = J P п .
Получим выражения, связывающие текущие значения ускорений с р l , ф l , n l , ^ l .
(Mk z, та у + —-yk + —Ly, та z ;
l J I M У J
|
• V Px |
=—y F j ) — 1 M jx |
I M^z { M k |
M + — l. M |
|
• V Py |
j )- m 2 1 y |
I Mk k x ( M k |
M + — l M |
|
• V Pz |
=—y F z) j ) — I M j Z 1 |
I Mk k yk V M |
M + — l M |
■ IMk Ml Утаz + —-zk + —Lz/ та,;
I M M l J x
У (Mk Mt у yi 1та x+1 yxk+M^xi 1та у;
( j ) _f M-Lv . M l , ■ )y F( j ) + f +Ml -z ^У jj ) mPY — y + y? f + z^ + Zi
у Px ( M k M l J j Z ( M k M l J j y та x =
в
^ i ( J LZ
Z
: К z k + M l x l Z i
в
xkzk
1 — M ^ I Mk — ( xkzt M J k k
— xz ^M k M l k ) M
1 - M^ | M M J 1
■
та
z
в
х л ;
в
J К x ) — M k x k yK — M i x i y i
в
+ х к У к 1
Mk \MM
--k- Шк — xky, — x, yk —k—‘-k kl lk
+ х 1 У 1 1
в
Ml bz l M
M J 1
та
У т ( j ) _| M k - , Ml - 7 mp — ---- Z r + Zi
Py I M k M 1
M k M l xF +
MkM
та у =
фl ( JLY — JLX ) + ФК ( J
+
+ х к У к 1 -
— J КX )— M k X K y
MM
■i — x i y k ) ^ M^
’ К — M l x i y i +
+ x i y i 1 1 — М I M i M J
та
х Jp ’ Jy
Расчет и конструирование
TO z

+ M k X K z K + M l x l z l -
Ч l ( JLZ - J ) + ^ к ( J К Z - J К X )
- xkzk V
Mk U /
M k I M k +( x k z i - x i z k
M k M l ' M
- x l z l
1 - M l - I Mt
M I 1
TO x
x jp-
Полученные выражения могут использоваться для получения оценок значений кинематических параметров и их производных в зависимости от взаимного положения груза относительно платформы БЛА.
Список литературы Математическая модель баллистического летательного аппарата с переменными массогеометрическими характеристиками
- Костров, А.В. Движение асимметричных баллистических аппаратов/А.В. Костров. -М.: Машиностроение, 1984. -272 с.
- Иванов, Н.М. Движение космических летательных аппаратов в атмосфере планет/Н.М. Иванов, А.И. Мартынов. -М.: Наука. Главная редакция физико-математической литературы, 1985. -384 с.
- Фаворин, М.В. Моменты инерции тел: справ./М.В. Фаворин; под ред. М.М. Гернета. -Изд. 2-е, перераб. и доп. -М.: Машиностроение, 1977. -511 с.
- Механика промышленных роботов: учеб. пособие для втузов. В 3 кн. Кн. 1: Кинематика и динамика/Е.И. Воробьев, С.А. Попов, Г.И. Шекелева; под ред. К.В. Фролова, Е.В. Воробьева. -М.: Высш. шк. -304 с.
- Мокин, Ю.А. Влияние малых углов атаки и скольжения на момент крена при гиперзвуковом обтекании тел вращения/Ю.А. Мокин//Теплофизика и аэромеханика. -2009. -Т. 16, № 1. -С. 37-42.
