Математическая модель динамики функционирования механизма привода утюга

Автор: Гусев Б.К., Пеленко В.В., Ширшиков А.М.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Математика и информатика
Статья в выпуске: 5, 2012 года.
Бесплатный доступ
В статье сформулировано управление движения механизма привода утюга, выраженное посредством операторов передачи движения.
Математическая и физическая модель, уравнение движения механизма, энергия, момент инерции, силы трения, оператор передачи движения
Короткий адрес: https://sciup.org/14082449
IDR: 14082449 | УДК: 648.4:621.01.001
Mathematical model of the iron drive mechanism functioning dynamics
Iron drive mechanism motion regulation, which is expressed by means of the motion translation operators, is formulated in the article.
Текст научной статьи Математическая модель динамики функционирования механизма привода утюга
В качестве объекта исследования выступает основной элемент данного типа технологического оборудования – механизм привода сварочного утюга. В его состав входят кулачково-коромысловый механизм, передаточное звено, тяговая цепь, пружина шагового транспортера, сварочный утюг, механизм отрезки пленки, клиперное устройство и другие элементы.
Для решения поставленной задачи необходимо описать физическую и математическую модели механизма привода утюга.
Механизм привода утюга будем рассматривать как голономную систему с одной степенью свободы, считая при этом, что связи в системе являются идеальными, а звенья механизма это абсолютно твердое тело. Тогда гибкие звенья, имеющиеся в механизме, можно считать всегда напряженными элементами, что позволяет отнести данные связи к двухстороннему виду. В качестве обобщенных координат системы принимаем угловую координату р и угловую скорость ср кулачка. Трением в шарнирах и колебанием утюга на пружине пренебрегаем. Последние допущения потребовали корректного обоснования, представляющего собой самостоятельную задачу.
За основу математической модели динамики функционирования механизма привода утюга выбрано дифференциальное уравнение движения. Для преобразования кинематических характеристик ведущих звеньев механизма в характеристики его ведомого звена в модель вводятся независящие операторы передачи движения, которые являются не зависящими от времени функциями [1,5].
Определение операторов передачи движения всех звеньев [2], входящих в данный механизм, начнем с кулачкового механизма.
Учитывая схему механизма привода утюга (рис.1), определим геометрические характеристики кулачкового механизма
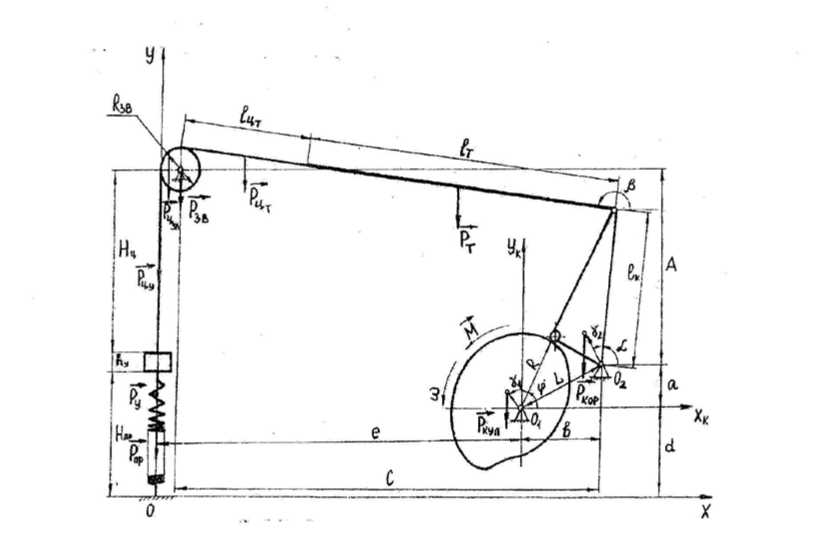
Рис. 1. Схема механизма привода утюга
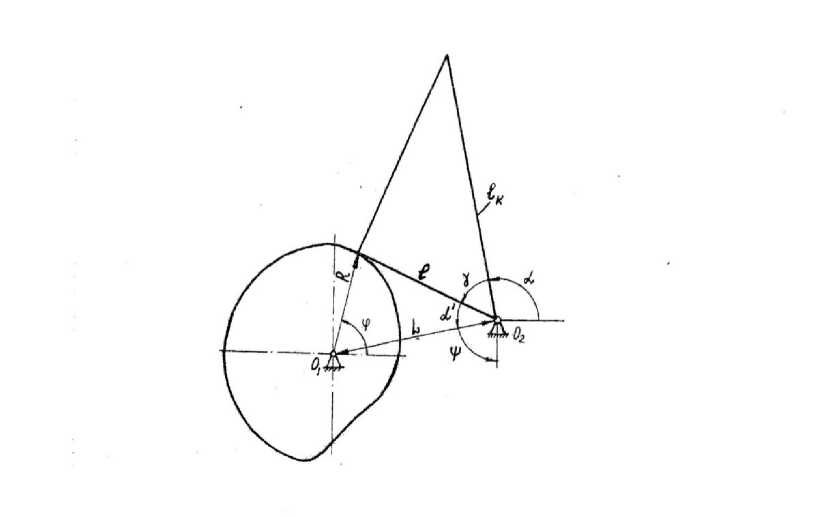
Рис. 2. Геометрические характеристики кулачкового механизма
В качестве ведущего звена в данном механизме выступает кулачок. Тогда справедливы следующие выражения для операторов передачи движения звеньев механизма.
Кулачок (рис. 2):
Угол поворота к=к (1)*
скорость dv = 1 dϕ
ускорение
d^ = 0. dv
Коромысло (рис.2):
Угол поворота
a = 0 - arccos(
L 2 + 1 2 - LIT
R 2
);
скорость
da = , 2R , dR dV J4L212-(L2 +12 -R2)2 dV
ускорение d a dv2
Тяга угол поворота
d a (d 2 R dR , dR J 2 R (L 2 + 1 2 - R 2)
--{(—г / —) + — (---■ ■ — й—;-- vv) }• d v d dv 2 d v d v RR 4 L 2 1 2 -( L 2 + 1 2 - R 2 ) 2
скорость
ускорение
где скорость
A - lK sin a в = n - arctg —1-------- ;
C +l сosα к dβ dβ dα --- =---; dϕ dα dϕ d2в = d2в (da)2 + dp da da da2 dv da dv2
dp _ lK ( lK - 4 1 sin a + Ccos a )
d a ( C + lKcos a ) 2 + ( A 1 - lK sin a ) 2 ’
(1)**
(1)***
ускорение d2 в = lK (l K 2 - A12 - C 2)(A1 cos a + C sin a) dv2 {(C +1K cos a)2 + (A1 -1K sin a)2}2 ’
где 4 = А + R3B ;
-
lк – длина большого плеча коромысла, м;
-
А, С - расстояние между осями вращения коромысла звездочки по осям ординат и абсцисс, мм;
RЗВ – радиус делительной окружности звездочки, м.
Цепь суммарная длина цепи
Н ц = ‘ ц + > Т + С + c a - n R . ; (10)
cos в 2
скорость dH dH d α
----ц- =----ц---; (11) dϕ dα dϕ ускорение
Нц – длина той же части цепи в текущий момент, м.
Приводной механизм
p p - угловая координата ротора электродвигателя, рад.
Решая задачу по формированию математической модели, составим обобщенное дифференциальное уравнение движения динамической модели (для механизма привода утюга), где кинематические характеристики механизма выразим посредством операторов передачи движения. Для этого значения скорости и ускорения звеньев определим через следующие выражения:
Коромысло скорость da _ dp da dt dt dp ’
|
ускорение |
d 2 p d p d a ( d p Л d 2 a —T = —T--+ | —1 T. (20) dt dt d p V dt J d p |
|
Тяга скорость |
d e = d p d p ; (21) dt dt d p |
|
ускорение |
dp = d p d e , ( dp } 2 d2 в 1 1 1 7. (221 dt dt d p V dt J d p |
Цепи утюга и пружины
|
скорость |
ldH - dHnp d p dH ; (23) dt dt dt d p |
|
ускорение |
d2 H ц _ d H пр _ d p dH „ ( d p Y d^H „ 2 = 2=2 +| 1 2 ’ (24) dt dt dt d p v dt J d p |
|
Привод скорость |
d p = 1 p (25) d p i dt |
|
ускорение |
= 1 d p • (26) d p 1 dt |
При составлении дифференциального уравнения для движения механизма привода утюга используем уравнения Лагранжа второго рода
Q p - обобщенная сила, соответствующая обобщенной координате.
Кинетическая энергия системы Т состоит из кинетической энергии привода ТПР , кулачка ТКУЛ , коромысла ТКОР , тяги Т ТЯГИ , цепи ТЦ , звездочки ТЗВ , утюга ТУ и пружины Т ПРУЖ .
|
Т = Т ПР + Т КУЛ + Т КОР + Т ТЯГИ + Т Ц + Т ЗВ + Т У + Т ПРУЖ • (28) |
Кинетическая энергия звеньев, совершающих вращательное движение (приводной механизм, кулачок, коромысло, звездочка), определяется по следующему выражению [3]:
T = 2 J o , (29)
где J – момент инерции, кгм²;
о - угловая скорость, с - 1 .
В случае плоского движения кинетическая энергия твердого тела (в рассматриваемом механизме таким телом является тяга) находится из следующего соотношения [5]:
T = 2 ( mV 2 + J o 2) (30)
где m – масса тяги, кг;
JZ – момент инерции тяги относительно оси, перпендикулярной к плоскости движения и проходящий через центр масс, кгм²;
-
VC – скорость центра масс при поступательном движении тяги, м/с;
-
о - угловая скорость вращения, с - 1 .
Как видно из схемы (рис. 3), для скорости центра масс тяги справедливо следующее выражение:
V C = у Д +^S, (31)
где VД – вектор скорости точки Д ;
Д8 = 0,5 lT - расстояние от точки Д до центра масс S, м.
Величина вектора скорости точки Д равна
_ d@ d a J
V д = lipК ’
После соответствующего преобразования получим следующее выражение кинетической энергии тяги:
-
1 ,dp^, da 2l 2, 1, 2, dip.2 da dp diP^yy
T T = -(—) ( т т {(—) l r + -l T + ( ) + —l k —l T cos( P - a ) + J Т ( ) }). (33)
-
2 dt d p 4 d p d p d p d p
Кинетическая энергия цепи состоит из кинетической энергии цепи, присоединенной к тяге Т цТ , находящейся на звездочке Т цЗВ и присоединенной к утюгу Т цУ .
Рассматривая цепь, присоединенную к тяге, как продолжение тяги, получим следующее выражение кинетической энергии этого участка цепи:
T = 1 ( dp\m T{(—)2l 2 + (lT + -1 ТУ(в 2 + цТ 2 ( dt7 V цТ {( dp7 к ( T 2 цТ ) ( dp7
_ da, dp,, 1 z ч T dip. 2,x
+ 2~J lK ~, (Тт + ~1цт )cos(e a) + J цт (~ ) }), dp dp 2 dp где mцЕ
l цТ
= тц -2— - масса цепи, присоединенная к тяге, кг; lц mЦ – масса цепи, кг;
, C +1 cosa ,
-
l Т = к - l Т – длина этого участка цепи, м;
ц cos в
J цТ – момент инерции рассматриваемого участка (определяется относительно оси проходящей через центр масс), кгм².
Кинетическая энергия цепи, находящейся на звездочке, вычисляется по формуле (29), в которой под моментом инерции понимается момент инерции рассматриваемого участка цепи, относительно собственной оси вращения (совпадающей с осью вращения звездочки), а в качестве угловой скорости – угловая скорость звездочки.
Угловая скорость звездочки равна
&;* = • “- sin( в - a ) .
зв R dt
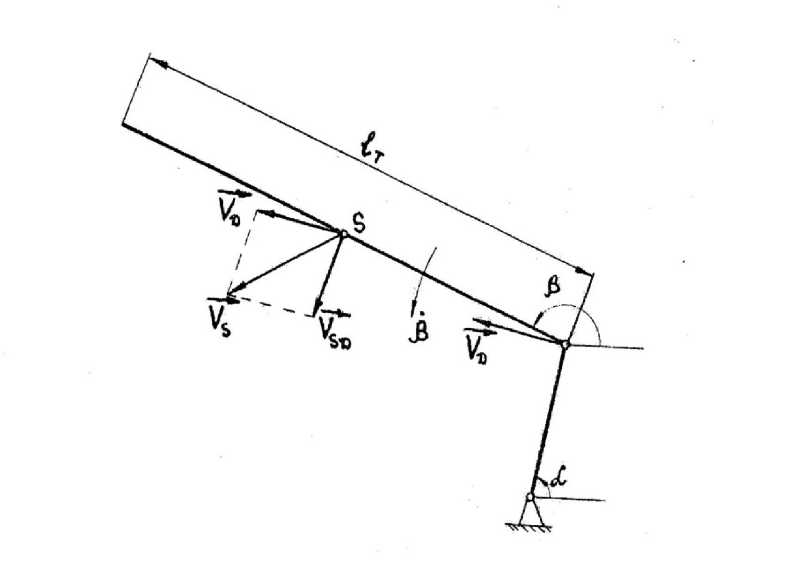
Рис. 3. Схема для определения скорости центра масс тяги
Тогда
Т ц.зв = 1( dh 2 J ЗВ ( d a )2{^- sin( в - a )}2. (35)
-
2 dt d p R 3B
Участок цепи, присоединенный к утюгу, движется поступательно. Кинетическая энергия данного участка цепи вычисляется на основе следующего соотношения:
Т у = 1 m ,y ( dH )2. (36)
2 dt
H ц где mцУ = mц lц
– масса цепи, присоединенная к утюгу, кг.
Подставляя (32)–(34) в (35), получим выражение кинетической энергии цепи
T = (d?)2{m T(dda)2lK2 + (lT +1)2(dl)2 + 2—I'd^X ц цТ к Тк dt dp 2 dp dp
X ( lT + P ) X cos ( e - a )] + J ЦЗВ ( -l- sin ( e - a )) 2 ( d ^ ) 2 + тЦ у ( d-ц- ) 2 } .
2 R3e dp
Кинетическая энергия утюга и пружины вычисляется по формуле (29), в которую подставляются значения массы утюга my и пружины (0,33 mПРУЖ ) соответственно, а для кинетической энергии системы получим следующее выражение:
1 ,dpx2( ^^2 d вР ^а.2 ,2 1, 2 ,в2
T = J J { J пр W2 + J кул + J кор (т ) 2 + J T ( ] + т т [(— ) 2 l K + — l T (-3 2 +
2 dt i dp dp dp 4 dp
, da . de , ,
+--lv —lT cos(e - a)] + m,lT к Т цТ dp dp
^ d a A 2 v d p )
1 k +1 l T + 2 1 цт
I d p)
f
цТ
•
•
/ sin (e -a)
I R 3B
( d— A 2
v d p )
\2
^ d a
) I d p )
d a d e
+ 2—l К dp dp
I d p )
•
+ ( J цЗВ + J ЗВ ) •
A 2 (
■ + | т цу + m у
. 1 A
+ 3 т пруж )
.
Выражения для вычисления величины момента инерции звеньев механизма привода утюга приведены ниже.
Для вычисления величины обобщенной силы используем принцип возможных перемещений [4, 5], согласно которому придаем системе возможное перемещение 8p > 0.
Получим сумму элементарных работ
( ^5 А ) p = М 8 А - d p dp - F T 8 H ,
где М – крутящий момент на валу звездочки, Нм;
dП
— ap - элементарная работа консервативных сил, дж;
d p
F a H - элементарная работа сил трения на направляющих утюга, дж.
Как следует из формулы (39), для обобщенной силы справедливо выражение
Q = M ^ p
—
dП d p
—
dH
F T . d p
Для вычисления обобщенной силы необходимо выразить потенциальную энергию системы в функции обобщенной координаты.
Потенциальная энергия механизма (рис.1) складывается из потенциальной энергии кулачка Пкул , коромысла П , тяги Пт , цепи Пц , утюга Пу и пружины Ппруж , которые определяются из следующих соотношений:
для кулачка
П кул = Р кул ( Р цТкул Slll ( ^ + Y 1 ) + а)
для коромысла
Пкор = Ркор ( а + d + R ^Tkop Sin( a + Y 2 ) )
для тяги
П Т = Р Т а + d + 1 к s i n а + “ lT sin в j ;
для цепи
П ц
Р 1 п
l {1цТ (a + d + A + R3B — — 1цТ Sin в) + ~ R3B [a + d +
+ A + R 3B Sin(-)] + H ц ( a + d + A + — -H ц )};
для утюга
Пу = Ру а + d + A — H
ц
—
для пружины
П пруж
к
h
f
2 J
;
= 1 ( р Н + С ( Н
2 \ пруж11 пруж v пруж V 1 пруж
—
Н
1 пруж 0
где Ркул , Ркор , РТ , Рц , Ру , Рпруж – силы тяжести кулачка коромысла, тяги, цепи, утюга и пружины, соответственно, Н;
RцTкул , RцT к Op — расстояния от центра масс до оси вращения кулачка и коромысла, соответственно, м;
-
а , d , А , h y - геометрические характеристики механизма, выбираемые конструктивно, м;
-
Y 1 , y 2 - угловые характеристики, рад.
Произведя соответствующие преобразования, получим формулу для потенциальной энергии механизма, выраженную через обобщенную координату dn , dd
= РкулRцTкул c0S(^ + Y1) + РкорRцTкopCOS(a + Y2) — + PT (lk coS a~ + dp p p dp
-
1 d d/L Р ц dH ц . 1/ 2 о в\
+ —1т c0S P -—) + — {—-- ( 1 цТ Sin в — R 3B — H ц ) — -l 4 T c0S P -—) —
-
2 dp 1ц dp 2
—
PЦ
dHЦ d p
+ { C пр ( H ПР
H ПР 0 ) + 2 Р ПРУЖ ; }
dH ПРУЖ d p
Ввиду того, что ранее рассматривался вопрос о действующих в механизме силах трения, принимаем во внимание только силу трения в направляющих утюга
F t = K ( Р у + С ,р ( Н рж
—
Н J + Р 1 пруж 0 ) 1 пруж
—
где Fин – сила инерции утюга, Н (величина силы инерции определяется по формуле d2 H ц
F = m );
ин у dt2 ’
К – коэффициент, учитывающий направление движения утюга (К = - 0,0747 – при движении вниз, К = 0,089 – при движении вверх).
Подставим выражения кинетической энергии (38), потенциальной энергии, вычисленной через обобщенные координаты (47), и силы трения (48) в уравнение Лагранжа второго рода и при этом осуществим соответствующие преобразования. В результате получим обобщенное уравнение движения механизма привода утюга, выраженное посредством операторов передачи движения.
С =
d2p die a1

B i ,
r , 142 T T ,da.2 dda.2,2 1,2 de ,2 da. dp cl = J (-)2+J +J (---Y+mT{(---2 1 + — lT (—^~)2-i
-
1 п КуЛ кор *T ТК
i pp dp 4 dp вр
-
■ It cos(P — a)} + +(JT + J ЦТ)(dp}2 + m,T {(p )2 /к2 + (^ + к )2(p)2 + dp dp 2
где
+ 2 dp l„ dP (It + )cos(P — a)} + +((J,.3, + J_)(p sin(P — a)}2 + dp dp 2
1 dH 2
+ ( т цу + m у + р ПРж ) )(— m , K (~— ) ;
3 dp
T ,da d2a , z в 1 = J кор ( , )( ,) + (mT + тЦ dp dp
Pird2 a da , 2 A,, xde d/
—){— 2 —/к + 1 -( l T + / цТ ) +—— } + / ц dp2 d p 3
1 . . da de da d2в 1 da de dPT da
+ -/к (/Т + /цТ )cos(P — a ) X---2— +--+ +------x
2 ц dp dp dp dp /Т + /цТ dp dp dp dp de da. mu d/ dda2.2 1 z, , dPr x tg (в - a )(^--)) + —ц—{(--)2 /K ++ -(/T + /u J2 x (^)2 + кТ цТ dp dp 2p dp dp 3
+ dr1- dr ( /т + /цТ )cos(e — a)} + (m, ■ + J) X pl2sln2( в — a){d" + dp dp /, R, dp
+ —ctg(r—a)■ (——da)} + {——(H, dH,+!(H )2} + dp dp dp /ц dp dp2
d 2 H dH
+ {mу(1 + K) + -m^, }x-^-рц 6 dp dp с, = M —PRT coAa + yA-P RT cos(a + /J--
1 кул кул цТкул V / 1/ кор цТкор V / 2/ d n da 1 , d dp. P, dH,.
-
- PT (/к cos a — + -/t cos P —)--—{——(Ц sin в - R3e - H, ) -
- dp 2 dp) pdp
dHdH
-
— - Pt 2 cos ^/} + { P — ( C пр A H пр + - Р пр ) — }(1 + K ).
2 dp dp2
Выводы
На основе преобразованного уравнения Лагранжа второго рода (в данное уравнение введены выражения: кинетической и потенциальной энергии, вычисленные через обобщенные координаты; силы трения) получено уравнение движения механизма привода утюга, выраженное через операторов передачи движения.
