Математическая модель движения верхней части тела водителя при резком торможении

Автор: Катаев С.П., Антонова А.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (60) т.17, 2013 года.
Бесплатный доступ
В работе рассмотрена математическая модель движения верхней части тела водителя при лобовом столкновении автомобиля с препятствием. Верхняя часть тела водителя моделируется системой четырёх неоднородных стержней, связанных между собой шарнирами, которые моделируют суставы. Предполагается, что четвёртый сегмент жестко скреплён с головой. Параметры стержней, в частности положение их центров масс, взяты из антропометрической литературы. Упругие свойства суставов и действие мышц сгибателей-разгибателей моделировались с помощью спиральных пружин определённой жесткости. Рассмотренная механическая система имеет четыре степени свободы. Предполагалось, что верхняя часть тела водителя совершает плоскопараллельное движение, а корпус автомобиля движется поступательно равнозамедленно. Ускорение указывалось в долях ускорения свободного падения. В основу решения положены дифференциальные уравнения Лагранжа второго рода, которые были разрешены относительно старших производных. Решение произведено численно методом Рунге–Кутты. Ограничением на движение тела водителя является рулевая колонка. Получены зависимости углов отклонения сегментов тела от вертикали, их угловых скоростей и угловых ускорений от времени. Построены графики этих зависимостей. Результаты решения показывают, что поведение верхней части тела водителя в основном совпадает с поведением, наблюдаемым при видеосъёмке краш-тестов на первом этапе столкновения: от момента начала удара до полной остановки корпуса автомобиля. Обратный отброс корпуса водителя в данной работе не рассматривался. Результаты также показывают, что при лобовом столкновении автомобиля не наблюдается «хлыстового» движения сегмента голова – шея. Проведено сравнение результатов данной работы с данными других авторов. Показано, что результаты практически идентичны.
Краш-тесты, системы безопасности автомобиля, пассивная безопасность, уравнения лагранжа второго рода, инерциальная система, математическая модель, рулевая колонка
Короткий адрес: https://sciup.org/146216093
IDR: 146216093 | УДК: 531/534:[57+61]
Текст научной статьи Математическая модель движения верхней части тела водителя при резком торможении
В настоящее время количество автовладельцев в мире превысило один миллиард и понятие «пассивная безопасность» стало привычным. Под ним понимается комплекс мероприятий, реализованных в конструкции транспортных средств, направленных на смягчение тяжести последствий свершившегося дорожно-транспортного происшествия [2, 4, 9]. Ежегодно автомобильные компании тратят большие деньги на проведение краш-тестов, определяя слабые места водителя, пассажиров, самого автомобиля и даже пешеходов. Стоимость одного краш-теста составляет порядка 100 000 долларов [6, 13].
Антонова Анастасия Александровна, магистрант кафедры теоретической механики, Пермь
Результаты исследований показывают, что отдельные части тела человека при дорожно-транспортных происшествиях травмируются неодинаково [1, 3, 7, 11]. Кроме того, характер травмы зависит и от вида столкновения [5]. Согласно статистическим данным итальянских, немецких и американских исследователей, среди элементов конструкции салона автомобиля наиболее травмоопасными для человека при дорожнотранспортных происшествиях являются: ветровое стекло, рулевая колонка, щиток приборов, боковые двери, спинка сиденья, зеркало заднего вида, крыша, боковая стойка. При этом основная причина получения тяжёлых и смертельных травм – удары о передний щиток, рулевую колонку и ветровое стекло. С ударами о ветровое стекло связаны такие травмы, как повреждение черепа, сотрясение мозга и т.п. [5].
Подробная задача о поведении шеи при фронтальном, боковом ударах и ударе сзади рассмотрена в статье [12] с учетом форм позвонков. Интерес представляет характер движения всей верхней части тела и определение возникающих реакций в суставах.
Создание математических моделей для описания процессов, происходящих при столкновениях, позволит значительно снизить затраты на проведение краш-тестов, увеличить их количество и отладку нововведений [6]. Например, в работе [8] рассмотрено построение математической модели автомобиля, что уже сокращает расходы на экспериментальное тестирование кузовного материала.
Постановка задачи
Рассмотрена четырёхстепенная математическая модель туловища водителя. Туловище разбито на четыре сегмента: нижний отдел туловища, средний отдел туловища, верхний отдел туловища и голова с шеей. Такие сегменты тела выделены на основании ориентирования по антропометрическим точкам [8]. Начало и конец сегмента должны касаться оси вращения в суставе. Сегмент голова – шея рассматривается от макушки до остистого отростка седьмого шейного позвонка, верхний отдел – от седьмого шейного позвонка до нижнегрудинной точки. Средний отдел – от нижнегрудинной до пупковой точки, нижний отдел выделяется тремя плоскостями: поперечная проходит по верхнему краю пупка, а две другие идут наискосок до лонного сращения через подвздошные оси. Эти три плоскости образуют равнобедренный треугольник с постоянным углом 74°. Для данного сегментирования известны массы, геометрическое место центров тяжести, моменты инерции (табл. 1).
Параметры определены радиоизотопным методом на рассеченных трупах [8]. Погрешность оценки масс 3%, моментов инерции – до 10%. Ошибки обусловлены не самим методом, а неточным рассечением. Данные соответствуют параметрам молодого мужчины ростом 175 см и весом 75 кг.
Туловище водителя представлено в виде цепочки из четырёх сегментов (рис. 1), связанных между собой шарнирами и спиральными пружинами, имитирующими упругость мышц. Шарнир О 1 связан с креслом водителя (а через него – и с корпусом автомобиля) и движется вместе с ним. Движение туловища рассматривается относительно системы координат O 1 X 1 Y 1 , движущейся поступательно вместе с корпусом автомобиля. При торможении автомобиля система O 1 X 1 Y 1 движется по какому-либо закону X ( t ) относительно неподвижной, связанной с дорогой системы координат OXY . Для упрощения расчётов в работе принято, что это движение – равнозамедленное с ускорением a = kg , где k = const. Положение туловища относительно осей O 1 X 1 Y 1 полностью определяется углами отклонения от вертикали φ 1 , φ 2 , φ 3 , φ 4 для нижнего, среднего, верхнего отделов туловища и головы с шеей соответственно. Жесткости спиральных пружин обозначены через с 1 , с 2 , с 3 и с 4 соответственно. При расчётах учтены также силы тяжести сегментов.
Задача рассмотрена без применения теории удара. Определены параметры движения туловища до момента столкновения с рулевой колонкой.
124 ISSN 1812-5123. Российский журнал биомеханики. 2013. Т. 17, № 2 (60): 123–131
Таблица 1
Заданные параметры модели
|
Параметр |
Голова – шея |
Верхний отдел туловища |
Средний отдел туловища |
Нижний отдел туловища |
|
Масса, кг |
5,02 |
11,5 |
11,64 |
8,16 |
|
Центр масс, доли (от нижнего конца) |
0,55 |
0,507 |
0,45 |
0,354 |
|
Сагиттальный момент инерции, кг∙м2 |
2,72 |
17,26 |
12,81 |
6,57 |
|
Углы отклонения сегментов тела от вертикали, рад |
0,01 |
0,01 |
–0,06 |
–0,12 |
|
Упругость мышц сегментов, Н∙м |
30 |
40 |
50 |
50 |
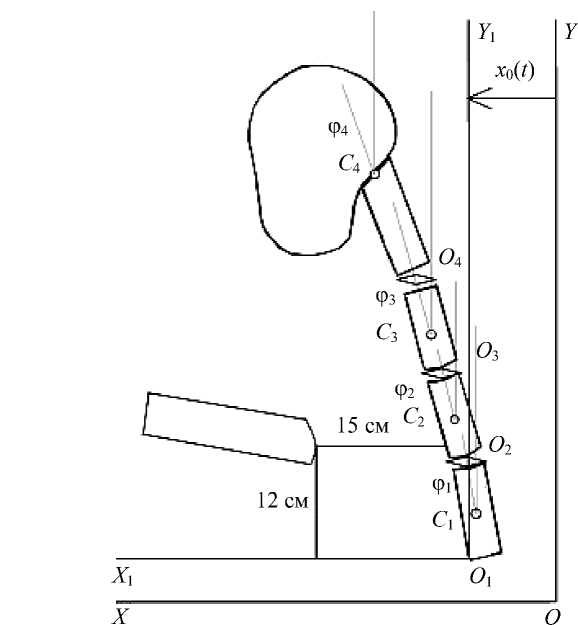
Рис. 1. Биомеханическая модель тела водителя в салоне автомобиля
Решение задачи и обсуждение результатов
Уравнения движения туловища получены в виде уравнений Лагранжа второго рода. При вычислении кинетической и потенциальной энергий системы учитывались очевидные связи:
rc i = OOi + O.C rc 2 = OO1 + O1O2 + O 2C2, rc 3 = OO1 + O1O2 + O2O3 + O3C3, rc 4 = OO1 + O1O2 + O2O3 + O3O 4 + O4C4.
Дифференциальные уравнения движения туловища могут быть приведены к виду
• • • • • • • • ■< а^Ф1 + апф2 + апф3 + а14Ф4 = d 1, а 21Ф1 + а 22Ф2 + a 23Ф3 + a 24Ф4 = d 2, а 31Ф1 + а 32Ф2 + а 33Ф3 + а 34Ф4 = d 3, а41ф1 + а42ф2 + а43ф3 + а44ф4 d4 •
Коэффициенты в уравнениях (2) выражаются через исходные данные (массы, длины сегментов, их моменты инерции и жесткости пружин) с помощью соотношений а11 = (0,5072 m1 + m 2 + m 3 + m 4) L2 + J1 + J2 + J3 + J4, а22 = (0,452 m 2 + m 3 + m 4) L2 + J2 + J3 + J4, а33 = (0,3542 m 3 + m 4) L2 + J3 + J4, а44 = 0,52 m 4 L4 + J4,
а12 = а 21 = (0,45 m 2 + m 3 + m 4) L1 L 2cos (Ф1 - ф2) + J2 + J3 + J4, а13 = а31 = (0,354m 3 + m 4) L1 L3cos (Ф1 -ф3) + J3 + J4, а14 = а 41 = 0,5 m 4 L1L4cos (Ф1 -ф4) + J4, а23 = а32 = (0,354m3 + m4)L2L3cos(ф2 -ф3) + J3 + J4, а24 а42 0, 5m4L2L4cos (ф2 ф4 ) + J4 , а34 а43 0, 5m4L3L4cos (ф3 ф4 ) + J4 , d 1 = -(0,45m2 + m3 + m4)L1 L2sin(ф1 -ф2)т2 -(0,354m3 + m4)L1 L3sin(ф1 -ф3)ю2 -
- 0,5 m 4 L 1 L 4 sin( ф 1 -ф 4 ) ю 4 + ( 0,507 m 1 + m 2 + m 3 + m 4 ) gL 1 ( k cos ф 1 +sin ф 1 ) - (5)
— (c1 — C2 )Ф1+ c2Ф2, d2 = (0,45m2 + m3 + m4)L1 L2sin(ф-ф2)to12 -(0,354m3 + m4)L2L3sin(ф2 -ф3)го2 -
( m +2 m )
0,5m4L 2 L4sin(ф2 - ф4 )ro4 + —2—2—— gL2 (kcosф2 + sinф2) + c2ф2 - (c2 + c3 )ф3, d3 = (0,354m3 + m4)L1 L2sin(ф1 -ф3)го12 + (0,354m3 + m4)L2L3sin(ф2 -ф3)го2 - m
- 0,5m4L 3 L4sin(ф3 - ф4 )ro4 + -^- gL3 (kcosф3 + sinф3) + c3ф2 - (c3 + c4 )ro3 + c4, d4 = 0,5m4L1 L4sin(ф1 -ф4)го12 +0,5m4L2L4sin(ф2 -ф4)го2 +0,5m4L 3L4sin(ф3 -ф4)го2 +
m
+ -^3- gL 4 ( k cos ф 4 + sin ф 4 ) + c 4 ф 3 - c 4 ф 4 .
В уравнениях (5)–(8) параметр k – отношение ускорения автомобиля к ускорению свободного падения. При расчётах было принято k = 50.
126 ISSN 1812-5123. Российский журнал биомеханики. 2013. Т. 17, № 2 (60): 123–131
Разрешая уравнения (2) относительно старших производных и вводя переменные x 2i-1 =Фi, x 2i =Ф i
0=1,4 ) ,
систему уравнений (2) приведём к виду x2 i-1 = x 2 i, x2i =
A i.
A ,
i = 1,4.
где A и A i - определитель системы (2) и определители Крамера соответственно.
Система уравнений (9) решалась численно методом Рунге–Кутты. При начальных условиях, приведенных в табл. 1, получены результаты, на основе которых построены графики зависимостей параметров системы от времени (рис. 2–9).
Нижний отдел туловища движется вперед с возрастающей угловой скоростью.
Угол отклонения от вертикали среднего отдела с момента столкновения до момента времени t = 0,042 с увеличивается до 0,7 рад . Угловая скорость от начала торможения до момента t = 0,029 с возрастает до 0,038 рад/с. После чего сегмент меняет направление движения, и к моменту t = 0,042 с угловая скорость обращается в нуль. Затем она снова возрастает, достигая в конце движения значения 2,3 рад/с .
Таблица 2
Параметры, описывающие положение системы при столкновении с рулевой колонкой при t = 0,067 с
|
Параметры |
Сегменты |
|||
|
Нижний |
Средний |
Верхний |
Голова – шея |
|
|
Углы отклонения сегментов от |
0,74 |
0,65 |
2,94 |
1,82 |
|
вертикали, рад |
||||
|
Скорость отклонения сегментов от вертикали, рад/с |
21,85 |
27,82 |
38,24 |
72,54 |
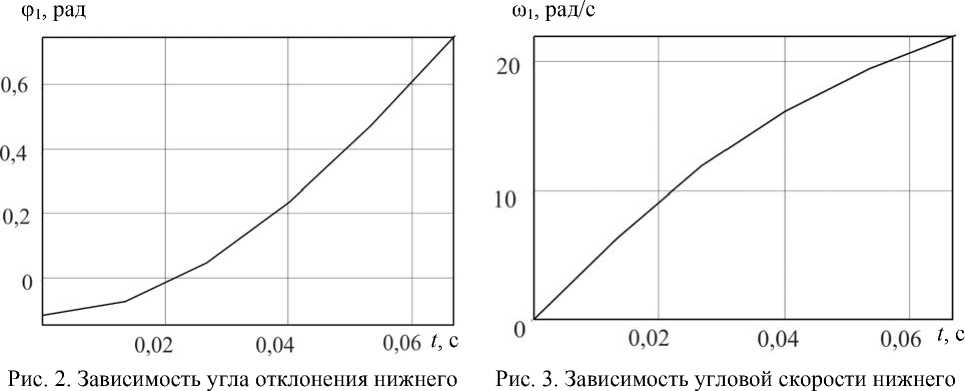
отдела от вертикали по времени отдела от времени
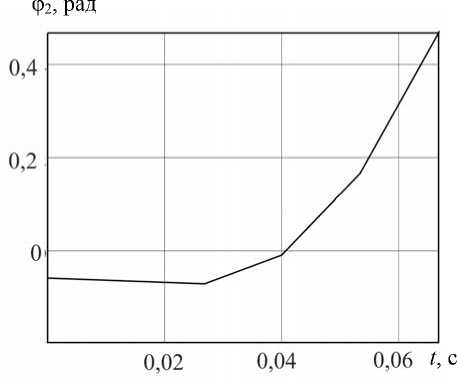
Рис. 4. Зависимость угла отклонения среднего отдела от вертикали по времени
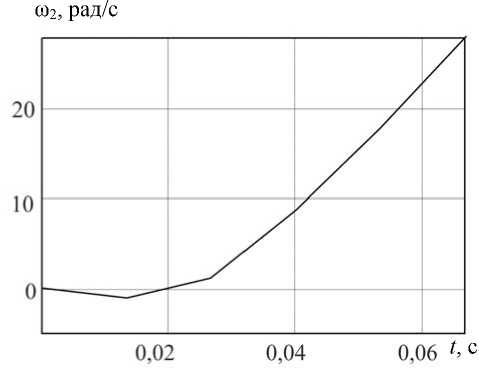
Рис. 5. Зависимость угловой скорости среднего отдела от времени
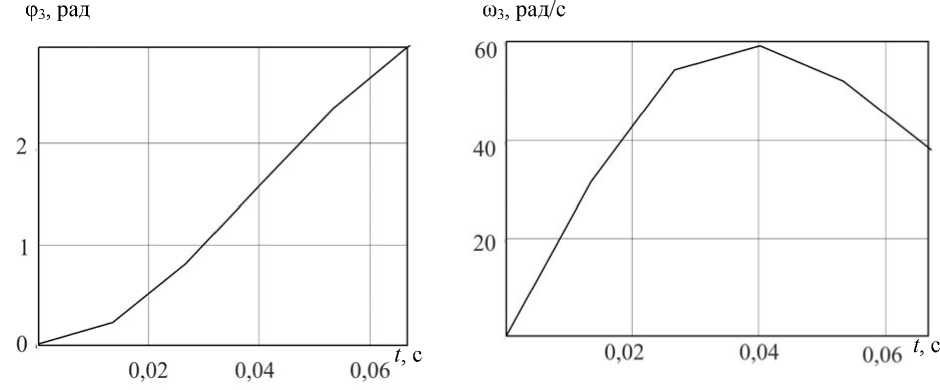
Рис. 6. Зависимость угла отклонения верхнего отдела от вертикали по времени
Рис. 7. Зависимость угловой скорости верхнего отдела от времени
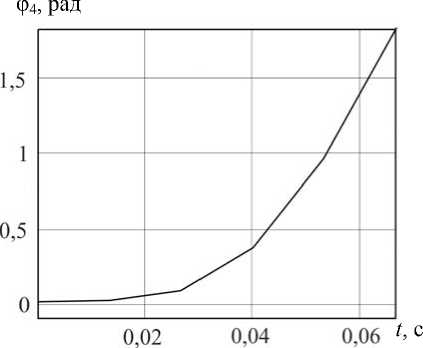
Рис. 8. Зависимость угла отклонения сегмента голова – шея от вертикали по времени
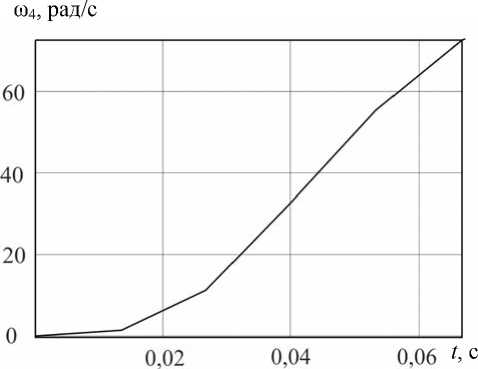
Рис. 9. Зависимость угловой скорости сегмента голова – шея от времени
Угол отклонения верхнего сегмента влево от вертикали увеличивается на всем временном промежутке. Угловая скорость возрастает до момента времени t = 0,042 с до 6,9 рад/с, после чего начинает убывать и в момент столкновения тела с рулевой колонкой достигает 3,8 рад/с, что может быть связано с разницей в длинах и массах предыдущих двух сегментов и этого. Два предыдущих сегмента более тяжелые и короткие.
Сегмент голова – шея от начала движения до момента времени t = 0,026 с незначительно отклоняется вправо от вертикали на угол 0,05 рад, после чего начинается быстрое его увеличение. В момент столкновения туловища с рулевой колонкой угол отклонения влево от вертикали составляет 1,3 рад. Угловая скорость с отклонением сегмента вправо возрастает до момента t = 0,019 с от 0 до 0,1 рад/с. К моменту времени 0,026 с (пока сегмент еще движется влево) скорость убывает до 0 и далее возрастает, достигая к моменту удара с рулевой колонкой 6,8 рад/с.
Проведённые расчёты показывают, что нижний отдел при резком торможении наклоняется вперед, следуя параболической зависимости от времени, а его угловая скорость возрастает практически линейно. Средний отдел почти сразу же отклоняется назад, его угловая скорость немного уменьшается, а затем начинает возрастать почти по параболической зависимости. Верхний отдел движется вперед, его угол отклонения на участке от 0 до π изменяется практически по закону косинуса. Угловая скорость сегмента примерно за первую половину временного промежутка до столкновения с рулевой колонкой увеличивается, а затем уменьшается примерно до половины максимального значения скорости. Угол отклонения от вертикали и изменение угловой скорости головы следуют одинаковой зависимости: сначала почти незаметное отклонение назад и уменьшение скорости, затем – параболическое возрастание.
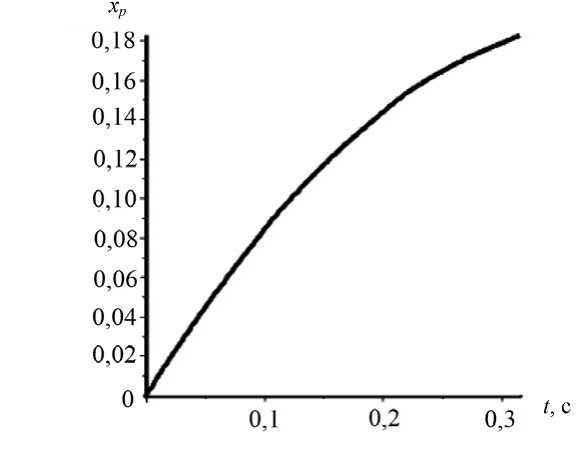
В статье [10] графически представлено движение головы от момента торможения до полной остановки (рис. 10).
x p
0,18 0,16 0,14 0,12 0,10
0,08 0,06 0,04 0,02
0,3 t , с
Рис. 10. График нормированного перемещения головы пассажира после начала торможения до полной остановки [5]: t – время от начала торможения, с; x p – нормированный угол отклонения головы от вертикали (отношение текущего угла наклона к начальному)
Выводы
В рассмотренной в настоящей статье математической модели «голова» отклоняется от вертикали с нарастающей скоростью, что совпадает с результатами работы [10]. Это позволяет предполагать, что предложенная математическая модель способна описывать характер движения тела водителя в салоне транспортного средства. Дальнейшее исследование необходимо для определения реакции и перегрузок, возникающих в суставах водителя при резком торможении, а так же для проведения оценки повреждений.
Список литературы Математическая модель движения верхней части тела водителя при резком торможении
- «АвтоВАЗ» провел краш-тесты Kalina и Priora [Электронный ресурс]. -URL: www.autorambler.ru/journal/events/26.10.2009/560955162 (дата обращения: 25.03.2012).
- Животный страх [Электронный ресурс]. -URL: www.autoreview.ru/archive/2008/06/chld_test (дата обращения: 25.03.2012).
- Краш-тест Hyundai Solaris от «Авторевю» [Электронный ресурс]. -URL: www.hyundai-solaris.com/stati/crashtest-solaris.html (дата обращения: 25.03.2012).
- Маякова М.В., Теньков М.В., Кочкаров В.И. Судебно-медицинская оценка повреждений, получаемых в салоне автомобиля живыми лицами//Научные ведомости БелГУ. Медицина. Фармакология. -2010. -№ 22, вып. 12. -С. 86-94.
- Механизм травмы [Электронный ресурс]. -URL: www.practica.ru/Books/preview/trauma/trauma_IV.pdf (дата обращения: 25.03.2012).
- Новописный Е.А., Шутов А.И. Возможности использования математического моделирования при имитации столкновения автомобилей//Новые материалы и технологии в машиностроении: сб. науч. тр. по итогам междунар. науч.-техн. конф. -Брянск: Изд-во Брян. гос. инженер.-технол. акад., 2011. -Вып. 13. -С. 142-146.
- Новоселов А.С. Судебно-медицинская оценка морфологических особенностей повреждений для диагностики водителя и пассажира переднего сидения при фронтальных столкновениях автомобиля: дис. … канд. мед. наук. -М., 2010. -169 с.
- Селуянов В.Н., Чугунова Л.Г. Масс-инерционные характеристики сегментов тела человека//Современные проблемы биомеханики. -1992. -Вып. 7. -С. 124-143.
- Спасают ли ремни безопасности? [Электронный ресурс]. -URL: www.pognali.info/articles/safe/remen (дата обращения: 25.03.2012).
- Фалалеев А.П. Оптимальная сдерживающая система для обеспечения безопасности пассажира при столкновении транспортного средства//Машиноприборостроение и транспорт. -Севастополь, 2011. -Вып. 118. -С. 145-150.
- Our tests [Электронный ресурс]. -URL: www.euroncap.com/tests.aspx (дата обращения: 25.03.2012).
- Van der Horst Marike J. Human head neck response in frontal, lateral and rear and impact loading: modelling and validation. -Eindhoven: Technische Universität Eindhoven, 2002. -217 р.
- Zhoul Shu-Wen, Li-XinGuo, Zhang Si-Qi and Tang Chuan-Yin. Study on Cervical Spine Injuries in Vehicle Side Impact//The Open Mechanical Engineering Journal. -2010. -№ 4. -P. 29-35.
