Математическая модель и теоретическое исследование производительности бункерного загрузочного устройства с радиальными карманами и активным ориентированием для ступенчатых изделий со сферическим торцом

Автор: А.Л. Бахно, Е.В. Пантюхина, С.А. Васин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
В статье рассматривается усовершенствованное универсальное механическое дисковое бункерное загрузочное устройство с радиальными карманами и активным ориентированием для асимметричных заготовок и изделий формы тел вращения. Представлены этапы построения математической модели вероятности захвата стержневых асимметричных ступенчатых изделий формы тел вращения со сферическим торцом и производительности усовершенствованного устройства, учитывающие влияние на вероятность захвата и производительность геометрических параметров изделий, конструктивных параметров устройства, окружной скорости органов захвата, коэффициентов трения между изделиями и контактирующими с ними в процессе захвата рабочими органами устройства, коэффициентов трения между изделиями при их взаимосцепляемости. Приведены результаты теоретического исследования вероятности захвата изделий и производительности усовершенствованного устройства при различных значениях зазора по шагу, соотношениях длины и диаметра изделий, значениях коэффициента трения между изделиями и устройством. Получены максимальные значения производительности устройства при различных параметрах.
Бункерное загрузочное устройство, вероятность захвата изделий, ориентирование изделий, заготовки с асимметрией по торцам, производительность загрузки
Короткий адрес: https://sciup.org/148333487
IDR: 148333487 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2026-28-2-76-84
Mathematical Model and Theoretical Study of Feed Rate of Hopper Feeder with Radial Pockets and Active Orientation for Stepped Products with Spherical End
The article discusses an improved universal mechanical disk hopper feeder with radial pockets and active orientation for asymmetric workpieces and products of the shape of solids of revolution. Stages of construction of mathematical model of probability of gripping of rod asymmetric stepped products of shape of bodies of revolution with spherical end and feed rate of improved device are presented, taking into account influence on probability of gripping and productivity of geometric parameters of products, design parameters of device, peripheral speed of gripping members, friction coefficients between products and working elements of device contacting with them in process of gripping, friction coefficients between products at their interlocking. Results of theoretical study of probability of gripping of items and feed rate of improved device at various values of clearance by pitch, ratios of length and diameter of items, values of friction coefficient between items and device are given. Maximum device feed rate values were obtained at various parameters.
Текст научной статьи Математическая модель и теоретическое исследование производительности бункерного загрузочного устройства с радиальными карманами и активным ориентированием для ступенчатых изделий со сферическим торцом
В различных отраслях промышленности в производственных процессах довольно часто встречаются изделия формы тел вращения, состоящие из двух и более частей, иметь явную и неявную асимметрию формы и смещения центра масс [1, 2]. В процессе массового производства продукции возникает потребность автоматического ориентирования таких изделий для их автоматизированной подачи с производительностью от 150 шт./мин и более в оборудование линий, в том числе роторного типа, от одной технологической операции к другой [3, 4]. При этом изделия после каждой операции могут менять форму, размеры, свойства образующих поверхностей и другие характеристики.
Основным устройством систем автоматической загрузки асимметричных изделий, которое обеспечивает ориентирование, является механическое дисковое бункерное загрузочное устройство (БЗУ) [5, 6]. Устройства данного типа отличаются вероятностным принципом работы при захвате одного изделия из общей массы, что существенно ограничивает их использование для изделий даже незначительно отличающихся друг от друга размерами и формой [7]. Так традиционные конструкции БЗУ были предназначены для конкретных изделий, имеющих явную асимметрию формы или смещение центра масс, что позволяло их использовать ограниченно [8, 9]. При появлении изделий с неявной асимметрией стали разрабатываться усовершенствованные конструкции БЗУ, которые обеспечивали автоматическую загрузку изделий и с явной, и с неявной асимметрией, но имели недостаточно высокую производительность, так как в большинстве случаев приходилось переходить с активных способов ориентирования на пассивные [10–13]. В последнее время стали широко разрабатываться усовершенствованные универсальные БЗУ для асимметричных изделий с явной асимметрией, которые за счет регулировки размеров органов захвата и ориентирования могут загружать различные по форме и размерам изделия в некоторых диапазонах их параметров [14].
БУНКЕРНОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО С РАДИАЛЬНЫМИ КАРМАНАМИ И АКТИВНЫМ ОРИЕНТИРОВАНИЕМ ДЛЯ АСИММЕТРИЧНЫХ ИЗДЕЛИЙ ФОРМЫ ТЕЛ ВРАЩЕНИЯ
Для асимметричных заготовок и изделий формы тел вращения было разработано универсальное БЗУ с радиальными карманами и активным ориентированием [15, 16]. В усовершенствованном устройстве обеспечивается захват изделий радиальными пазами и карманами при участии кольцевого ориентатора (рис. 1).
а
б
Рис. 1. Усовершенствованное устройство с радиальными карманами и регулируемым кольцевым ориентатором (а) и общий вид его 3Э-модели (б) для асимметричных заготовок и изделий формы тел вращения
При вращении диска изделия, западая в радиальные пазы, движутся в сторону карманов. Если изделие движется асимметричным торцом вперед, то оно западает в профильную проточку кольцевого ориентатора и погружается в карман полностью; при движении изделия цилиндрическим торцом вперед, оно погружается в карман частично, так как упирается цилиндрическим торцом на край профильной проточки. Диск при вращении перемещает все изделия в верхнюю часть бункера, где установлен копир. Изделия, полностью запавшие в карманы, свободно проходят под копиром и перемещаются диском к разгрузочному окну для выдачи в приемный лоток. Изделия, не полностью запавшие в карманы, скользя по поверхности копира, вначале приподнимаются им в карманах, а затем опрокидываются и свободно западают в карманы, так как в зоне установки копира в верхнем кольце кольцевого ориентатора выполнен секторный вырез. В нижней части бункера выполнен бортик для предотвращения накапливания изделий на поверхности кольцевого ориентатора [17].
Устройство может быть использовано при загрузке изделий одного типоразмера, отличающегося диаметром цилиндрического торца на 20-30%, регулируется высота кольцевого паза. Регулировка усовершенствованного устройства под каждое изделие осуществляется путем изменения высоты кольцевого паза с помощью вращения регулировочных винтов и сжатия (разжатия) пружины.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРОИЗВОДИТЕЛЬНОСТИ УСОВЕРШЕНСТВОВАННОГО УСТРОЙСТВА ДЛЯ СТУПЕНЧАТЫХ ИЗДЕЛИЙ СО СФЕРИЧЕСКИМ ТОРЦОМ
Построение математической модели производительности усовершенствованного устройства позволит определить возможности конструкции по загрузке изделий без необходимости разработки экспериментального макета устройства и проведения предварительных испытаний, существенно сократив тем самым временные и материальные затраты на данные процессы. Математическая модель производительности строится при последовательном выполнении четырех основных этапов: определение вероятности Pi нахождения изделий по направлению к карману в положении, благоприятном для захвата (этап 1), вероятности pc того, что захвату не помешает взаимосцепля-емость изделий (этап 2), вероятности pи того, что захвату не помешает высокая окружная скорость и органов захвата (этап 3), определение вероятности захвата П и производительности БЗУ ПБзу (этап 4):
60и
П = PiPcP-и ; ПБЗУ =п —, где t = 5 + B = 5 + (di + Д) - шаг органов захвата (радиальных карманов), м; B - ширина радиального кармана, м; 5 - расстояние между радиальными карманами, м; d - наибольший диаметр заготовки или изделия, м; Д - зазор по шагу в радиальном кармане, м.
Построим математические модели вероятности захвата и производительности усовершенствованного БЗУ для асимметричных ступенчатых изделий формы тел вращения со сферическим торцом (рис. 2).
- вероятность p I того, что изделие окажется на поверхности диска после падения основанием цилиндрического торца (I):
8 i
= 2arccos
________ x ц.м. ________
7 ( x ц.м. )2 + 0,25 d 2
J___ x ц.м. __________,
2 2^( x ц.м. )2 + 0,25 d 2 ’
- вероятность p II того, что изделие окажется на поверхности диска после падения основанием асимметричного торца (II):
O II
= 2 arccos
сф l l 2 + хц.м.
x ц.м.
- Х ц.м. )2 + 0,25 d Сф
’ p ii = 2 -
J-K + Y сф l l 2 + х ц.м.
х ц.м.
2^( l - l 2 + х ц ф м.
- Х ц.м. )2 + 0,25 d с 2 ф
,
Рис. 2. Расчетные схемы для построения математических моделей вероятности захвата асимметричных ступенчатых заготовок и изделий формы тел вращения со сферическим торцом
На этапе 1 определяем:
где все геометрические параметры изделий представлены на рис. 2;
С ф=3 ( 2 r - l 2 ) i_d rZ/TT d F^^ _ d 2 + 4 l 2 .
хц.м. л x j +12 r ’ dсф a l2 хц.м. , + 4хц.м. ’ r’
4 3r- l2 \ [ 12 J^
- вероятность p V того, что изделие окажется на поверхности диска после падения ступенчатым снованием асимметричного торца (V):
R l Х ц.м. l 1 l 2 l х ц.м. l 1 l 2
Oy — 2arccos —। — 2arccos —,,
V ( l — х ц.м. - 1 1 - l 2 )2 + 0,25 d J 7 1 — Х ц.м. - 1 1 - l 2 )2 + 0,25 d 2 2
_ 1 х ц.м. l 1 1 2 1 х ц.м. l 1 1 2
PV = —/ =--1= ’
2 j2 \2?2
-y ( 1 Х ц.м. 1 1 1 2 ) + 0,25 d 2 2 у ( 1 х ц.м. 1 1 1 2 ) + 0,25 d 1
- вероятность pi max , которая характеризует возможность поворота изделия к карману требуемым торцом при расположении изделий на тех участках по периферии поверхности вращающегося диска в области карманов, где изделия располагаются в один слой:
Pi max = p^ (OII + OI + OV - 2 arcsin ~) п ад
где Р бок = 1 - ( Р l + Р ii + P v ) - вероятность нахождения на требуемой для захвата поверхности изделия [18]; ц - коэффициент трения между асимметричными изделиями и вращающимся диском БЗУ; а д - угол наклона поверхности вращающегося диска к горизонту, град.;
-
- вероятность pi max , которая характеризует в математической модели вероятности pi область, где над изделиями в процессе их захвата располагаются слои других изделий:
p i min
p бок 2 п
d +Δ arcsin—j=
2 /2
J d j + 1 ц
l ц
- arccos , 2 j2
J l ц + d j
где l ц - длина наибольшего по диаметру цилиндрического торца изделия, м.
-
- опре деление общего выражения для вероятности pi :
n R ф захв
Р/ = 1 - (1 - P i max )3(1 — P i min ) ’8° d 1 ■
где ф захв - зона захвата изделий (нижняя часть бункера БЗУ), град.; R - радиус вращающегося диска БЗУ, м.
На этапе 2 определяем:
-
- площади F i всех образующих изделие поверхностей и их сумму ^ F i ;
-
- углы ^ xi , ^ yi возможного поворота двух соприкасающихся поверхностей с i-ми соприкасаю- FF
щимися площадями 1 и 2 без отрыва друг от друга по плоскостям соответственно x и y;
-
- вероятность pc для описания влияния взаимосцепляемости изделий между собой в процессе
их захвата с учетом коэффициент трения Ц о между изделиями:
Pc = 1 -
0,4 • arctan ц 0
2 п • ( F i + F ii + F |ii + F iv + F v )
^ 242 • ( F i + F v ) + 2 F | + 4 F in + 3 F v + F iv J .
На этапе 3 определяем:
-
- предельное по захвату значение окружной скорости и Пред , при котором вероятность захвата становится равной нулю, то есть п = 0 , так как p и = 0 :
и пред = d f ggwih P +i^^ ,
где h p - высота радиального паза, м;
-
- вероятность p о отсутствия помех для захвата изделия от окружной скорости органов захвата:
P и = 1 -
u 4
[ dg + °, 4 g ( h p + 2 Д ) - °, 2 g ^5 d 2 - 4( Д- 2 h p )
-\2 . 2 1
На этапе 4 получаем:
- математическое выражение для описания вероятности захвата:
[1 - 1 ( p i + p 11 + p v) ( g ii + g i + g v - 2 arcsin — )]3 x п а д
η=
π R φ
-
захв
×
1 - 1 - ( P I + P II ) 2 n
arcsin
d +Δ l - l
1 г - arccos , 1
'+ ( l - 1 1 )2 v( l - 1 1 )2
18° d ,
×
■)
×
1 -
°,4 • arctan ц °
V2 д • ( F I + F Ii + F lu + F iv + F V )
^W 2 • ( F i + F V) + 2 F I + 4 F lu + 3 F v + F iv ]
×
;
x [1 -
d 1 g + °, 4 g ( h p + 2 Д ) - °, 2 g ^ 5 d 1 2 - 4( Д- 2 h p )2

-
-
- математическое выражение для описания производительности усовершенствованного БЗУ:
П
1 - ( P I + P II )
2 n
[1 — M P i i P i t P v) ( g ji + 8 j + 5 π
arcsin
×
1 —
0,4 • arctan ц 0
2 Пn • ( F j + F jj + F jji + F jV + F v )
x [1 —
-
2arcsin —)]3 x а д
d +Δ
= — arccos ' + ( l — l i )2
l — 1 1
V( 1 - l i )2 + d i
n R ф захв
180 d 1
×
■)
[ 2л/2 • ( F + F v ) + 2 F i + 4 F in + 3 F v + F iV ]
υ
Г-, ------—2
d 1 g + 0,4 g ( h p + 2 A ) — 0,2 g ^5 d f — 4( A — 2 h p )2 I
],
×
Полученные выражения позволяют теоретически описать вероятность захвата и производительность усовершенствованного устройства для асимметричных ступенчатых изделий формы тел вращения со сферическим торцом во взаимосвязи с параметрами устройства и загружаемых изделий.
ТЕОРЕТИЧЕСКОЕ ИССЛЕДОВАНИЕ ВЕРОЯТНОСТИ ЗАХВАТА И ПРОИЗВОДИТЕЛЬНОСТИ УСОВЕРШЕНСТВОВАННОГО УСТРОЙСТВА ДЛЯ СТУПЕНЧАТЫХ ИЗДЕЛИЙ СО СФЕРИЧЕСКИМ ТОРЦОМ
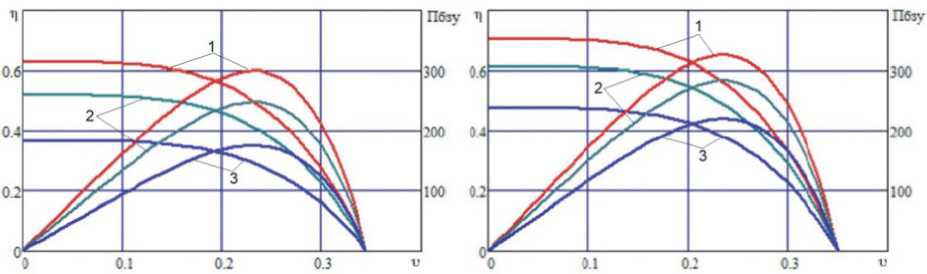
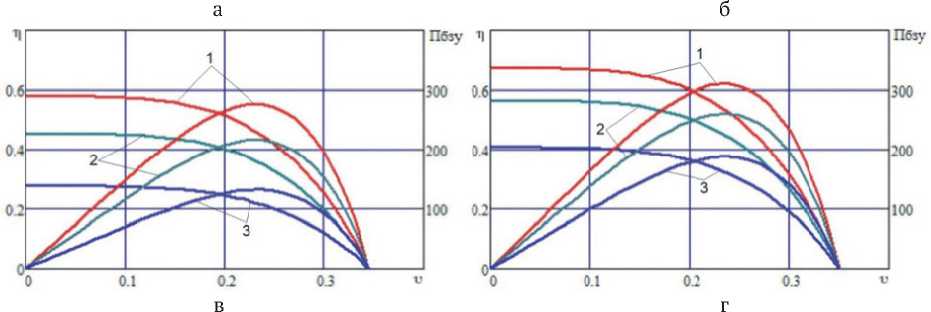
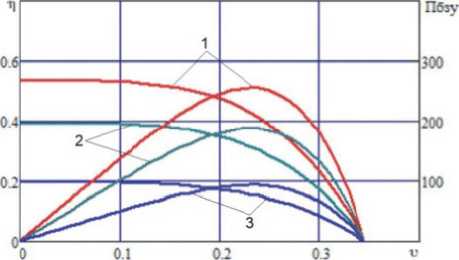
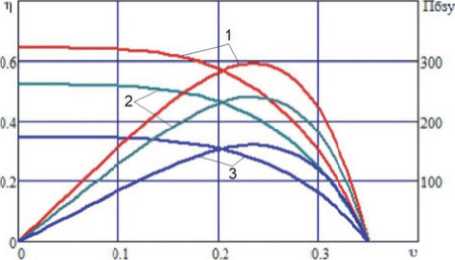
Для того чтобы оценить, на сколько произойдет увеличение производительности усовершенствованного устройства при загрузке ступенчатых изделий со сферическим торцом проведем теоретические исследования. Компьютерное моделирование производительности и вероятности захвата было выполнено в программе MathCad. Ниже представлены графики зависимостей вероятности захвата изделий, а также производительности усовершенствованного устройства от окружной скорости его радиальных карманов (рис. 3).
При моделировании были взяты постоянными для изделий следующие параметры: радиус вращающегося диска БЗУ R = 8 l м, диаметр цилиндрического торца изделия d i = 0,012 м, диаметр асимметричного торца изделия d 2 = 0,008 м, глубина радиального паза на вращающемся диске h p = 0,5 d i , длина части асимметричного торца в форме усеченного конуса l i = 0,25 1 м, длина части асимметричного торца в форме сегмента сферы 1 2 = 0,125 1 м, угол наклона вращающегося диска а д = 45 ° . Коэффициент трения изделий друг с другом Ц 0 = 0,45 .
При построении графиков варьировали длиной изделия l = 2,5 d i ; l = 3,0 d i ; l = 3,5 d i и зазором Д = 0,i d i ; A = 0,2 d i . Варьирование коэффициентом трения движения изделия по диску осуществлялось по значениям ц = 0,3 (i); ц = 0,4 (2); ц = 0,5 (3) .
Значения максимальной производительности усовершенствованного устройства при различных параметрах приведены в таблице.
Таким образом, производительность по загрузке изделий с торцом, плавно переходящим сначала в усеченный конус, а потом в сегмент сферы, для усовершенствованного устройства может достигать в зависимости соотношения длины и диаметра изделия до 300…325 шт./мин при максимальной вероятности захвата 0,63…0,7.
Таблица. Значения максимальной производительности усовершенствованного устройства
|
Величина зазора |
Коэффициент трения |
Значение производительности, шт./мин |
||
|
Соотношение длины изделия к диаметру |
||||
|
l = 2,5 d 1 |
l = 3 d 1 |
l = 3,5 d 1 |
||
|
А = 0,1 d 1 |
0,3 |
300 |
276 |
256 |
|
0,4 |
248 |
216 |
188 |
|
|
0,5 |
174 |
131 |
93 |
|
|
A = 0,2 d 1 |
0,3 |
325 |
310 |
296 |
|
0,4 |
283 |
260 |
241 |
|
|
0,5 |
220 |
187 |
159 |
|
Д е
Рис. 3. Визуализация математических зависимостей вероятности захвата и производительности усовершенствованного устройства при зазорах А = 0,1 d ^ (а, в, д) и А = 0,2 d i (б, г, е), соотношениях l = 2,5 d i (а, б); l = 3 d i (в, г) и l = 3,5 d i (д, е) и коэффициентах трения ц = 0,3 (1); ц = 0,4 (2); ц = 0,5 (3)
ЗАКЛЮЧЕНИЕ
Представленные математические модели вероятности захвата стержневых асимметричных ступенчатых изделий формы тел вращения со сферическим торцом и производительности усовершенствованного устройства учитывают влияние на вероятность захвата и производительность геометрических параметров изделий, конструктивных параметров устройства, окружной скорости органов захвата, коэффициентов трения между изделиями и контактирующими с ними в процессе захвата рабочими органами устройства, коэффициентов трения между изделиями при их взаимос-цепляемости. Результаты теоретического исследования вероятности захвата изделий и производительности усовершенствованного устройства при различных значениях зазора по шагу, соотношениях длины и диаметра изделий, значениях коэффициент трения между изделиями и рабочими органами устройства показали значительное повышение производительности по сравнению с ранее известным БЗУ с радиальными карманами и кольцевым ориентатором, в котором было реализовано пассивное ориентирование.
Теоретические исследования показали, что на значения вероятности захвата и производительность усовершенствованного устройства при захвате изделий радиальными карманами и их дальнейшем активным ориентированием с помощью копира оказывает влияние соотношение длины к наибольшему диаметру изделия, зазор по шагу кармана, а также коэффициент трения.
