Математическая модель кинетостатического расчета плоских рычажных механизмов

Автор: Сидоренко А.С., Потапов А.И.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 1 (67), 2016 года.
Бесплатный доступ
В настоящее время широко распространённые графоаналитические методы анализа во многом утратили свою актуальность, уступив место различным аналитическим методам с использованием компьютерных технологий. Поэтому особый интерес представляет разработка математической модели кинетостатического расчета механизмов в форме библиотеки процедур расчета для всех двухповодковых групп Ассура (ГА) и начального звена. Перед обращением к соответствующей процедуре, вычисляющей все усилия в кинематических парах, необходимо предварительно вычислить силы инерции, моменты от сил инерции, а также знать все внешние силы и моменты, действующие на эту ГА. С этой целью показаны расчетные схемы силового анализа для каждого вида ГА второго класса, а также начального звена. Нахождение реакций во внутренних и внешних кинематических парах основано на записи условий равновесия с учетом сил инерции и моментов от сил инерции (принцип Даламбера). Полученные таким образом уравнения кинетостатики для их универсальности были решены по правилу Крамера. Таким образом, для каждой ГА второго класса были найдены все 6 неизвестных: усилия в кинематических парах, направления этих сил, а также плечи сил. Если исследуется кинетостатика механизма с параллельным закреплением двух ГА на начальном звене, то в этом случае сила является геометрической суммой сил, действующих на начальное звено со стороны отброшенных ГА. Таким образом, получена математическая модель кинетостатического расчета механизмов в форме библиотек математических процедур определения реакций всех ГА второго класса. Разработанная математическая модель кинетостатического расчета позволяет просто осуществить ее программную реализацию.
Математическая модель, кинетостатический расчет, группы ассура
Короткий адрес: https://sciup.org/14040578
IDR: 14040578 | УДК: 532 | DOI: 10.20914/2310-1202-2016-1-70-78
Mathematical model of kinetostatithic calculation of flat lever mechanisms
Currently widely used graphical-analytical methods of analysis largely obsolete, replaced by various analytical methods using computer technology. Therefore, of particular interest is the development of a mathematical model kinetostatical calculation mechanisms in the form of library procedures of calculation for all powered two groups Assyrians (GA) and primary level. Before resorting to the appropriate procedure that computes all the forces in the kinematic pairs, you need to compute inertial forces, moments of forces of inertia and all external forces and moments acting on this GA. To this end shows the design diagram of the power analysis for each species GA of the second class, as well as the initial link. Finding reactions in the internal and external kinematic pairs based on equilibrium conditions with the account of forces of inertia and moments of inertia forces (Dalembert principle). Thus obtained equations of kinetostatical for their versatility have been solved by the Cramer rule. Thus, for each GA of the second class were found all 6 unknowns: the forces in the kinematic pairs, the directions of these forces as well as forces the shoulders. If we study kinetostatic mechanism with parallel consolidation of two GA in the initial link, in this case, power is the geometric sum of the forces acting on the primary link from the discarded GA. Thus, the obtained mathematical model kinetostatical calculation mechanisms in the form of libraries of mathematical procedures for determining reactions of all GA of the second class. The mathematical model kinetostatical calculation makes it relatively simple to implement its software implementation.
Текст научной статьи Математическая модель кинетостатического расчета плоских рычажных механизмов
DOI:
For cite
В настоящее время широко распространённые графоаналитические методы анализа во многом утратили свою актуальность, уступив место различным аналитическим методам с использованием компьютерных технологий [1-5]. Для ки-нетостатического анализа механизмов используются разнообразные компьютерные программы, в основе которых положены математические модели кинетостатического расчета. В связи с этим актуальной является разработка математической модели кинетостатического расчета плоских рычажных механизмов в форме библиотеки процедур расчета для всех двухповодковых групп Ас-сура и начального звена [2-4].
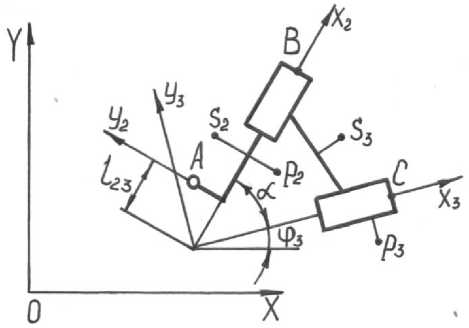
Группа Ассура первого вида
Перед обращением к процедуре, вычисляющей все усилия в кинематических парах, необходимо предварительно вычислить силы инерции, моменты от сил инерции, а также знать все внешние силы и моменты, действующие на эту группу Ассура. Расчетная схема приведена на рисунке 1 [1, 3].
Определение сил F 21 и F 34 . Сила F 21 приложена в кинематической паре А, а сила F 34 - в паре С. Тангенциальные составляющие этих сил F T и F 34 определяются по уравнениям моментов ^ M B = 0, составленных из условий равновесия второго и третьего звеньев. Направления тангенциальных составляющих этих сил примем совпадающими с положительными направлениями осей y 2 , y 3 .Тогда сумма моментов на втором звене в развернутом виде может быть представлена в виде
( Fin 2 sin a Fin 2 G 2 ) X 2 F in 2 cos a Fin 2 Y 2
+ M in 2 + M 2 + F 2 sin a F 2 XF 2 - F 2 cos a F 2 Y F 2 (1)
—FT lab = 0 , здесь Fin2 , Min2 - сила инерции и момент от сил инерции на втором звене; F2, M2 - внешние сила и момент, действующие на второе звено; αFin2 - угол наклона силы инерции второго звена; αF2 - угол наклона внешней силы на втором звене; X2, Y2, XF2, YF2 - координаты центра масс и точки приложения силы F2 второго звена относительно точки В в абсолютной системе координат; lAB - длина звена 2.
Координаты X 2 , Y 2 , X F2 , Y F2 определяются по следующим выражениям:
X 2 = S 2 x cos ^ 2 — S 2 y sin ^ 2 — lA B cos ^ 2;
XF 2 = P2 x cos ^ 2 — P 2 y sin ^ 2 — lA B cos ф 2;
Y 2 = S 2 xsi"n V 2 — S 2 y cos ^ 2 — lA B sin ф 2 ; (2)
Y F 2 = P 2 x Sin T i — P 2 y cos ^ 2 — lA B si n V 2 ;
Формула для определения F 34 аналогична:
FT
F 34
( Fsn ^ Fin 3 G 3 ) X 3 — F n 3 CoS « Fm 3 Y 3
l CB
, M 3 + M in 3 + F 3 sin a F 3 XF 3 - F 3 cos a F 3Y3 (3)
CB
Определения переменных, входящих в формулу соответствуют определениям переменных звена 2.
Нормальные составляющие F ^ 1 , F3 T 4 определяются по уравнениям типа ∑F x =0 и ∑F y =0 .
T _ ( Fn 2 sin a Fin 2 G G 2 ) X 2 - F in 2 CoS a Fm 2 Y 2
F 2‘ =----------------/------------------
AB
+
M 2 + Min 2 + F 2 s in a F 2 XF 2 - F 2 C os a F 2 Y 2
. (4)
l AB
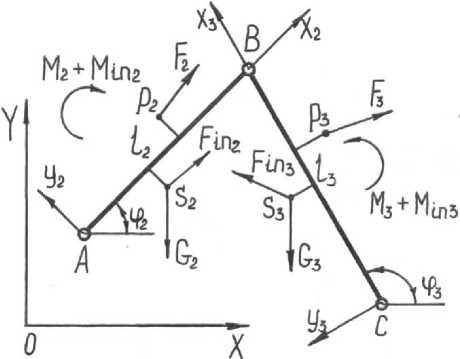
Рисунок 1. Расчетная схема группы Ассура первого вида
Запишем эти уравнения более подробно:
n Г П 1
F 21 cos ^ 2 + F 2 1 cos I ф 2 + — I + F 2 cosF 2
i n
+ F 34 cos I ^ 2 + -
+ F 3 cos ^ 3 + F 3 4 cos ^ 3 = 0 ; (5)

+ F 2 sinF 2
+ F 3 sin ф 3 + F 3 n 4 sin ф 3 - G 2 - G 3 = 0 .
Как видно, эти уравнения являются линейными относительно неизвестных F 2 n 1 и F 3 n 4 . Решение этих уравнений получим по правилу Крамера:
где
n
b1 cos ф 3 b 2 sin ф 3 cos ф 2 cos ф 3 sin ф 2 sin ф 3
COS ф 2 Ь1 sin ф 2 b 32
COS ф 2 cos ф 3 sin ф 2 sin ф 3
( 6 )
n I n 1 „
- b. = F.cos ф + + FcOsca. +
1 21 2 2 F 2
✓ x V (7)
i n i
+ F3 4 cos I ф 3 + — I + F 3 cos a 3 ;
n . n 1
- b 2 = F 21 sin I ф 2 + — I + F2sin a F 2
. n 1
+ F 34 sin I ф 3 + — I + F 3 cos a 3 - G 2 - G 3.
n T I П 1
F 21 cos ф 2 + F 21 cos I ф 2 + — I + F n 2 cos a Fin 2
I n 1
+ F in 3 COs a Fm 3 + F 34 cos I ф 2 + “ I = 0 ;
„ T . n 1
F 21 sin ф 2 + F 21 sin I ф 2 + — I + F n 2 sin a Fin 2
+ F 2 sin a F 2 + F in 3 sin a Fn 3 + F 3 sin a F 3 - G 2 - G 3
Теперь можно определить F 21 и F 34 , а
также углы наклона этих сил:
F 21 =V ( F 2 - 1 ) + ( F 21 ) ;
22 n
34 ^( 34 ) +( 34 ) ;
F 23 y = F 21 sin a F 21 - F in sin a Fin 2 - F 2 sin a F 2 (9)
+ g2 .
Следовательно,
23 ^( 23 x ) +( 23 y ) ;
a F 23
= arctan
F
23 x
F
I F 23 y I
Таким образом, найдены все 6 неизвестных для данной группы Ассура: усилия в кинематических парах А, В, С и направления этих сил.
Группа Ассура второго вида
Расчетная схема для определения усилий в кинематических парах данной группы Ассура приведена на рисунке 2 [3, 6].
Определение сил F 21 , F 34 . Расчет сил
начнем с определения силы F ^ . Эта сила опре-
деляется аналогично определению такой же силы для группы Ассура первого вида, поэтому
приводим выражение для силы F ^ 1 без подроб-
ного объяснения:
р т _ ( F in 2 sin a Fin 2
F 21
- 2) X 2 - F in 2 c Os a Fin 2 Y 2
l АB
M^ + M ,„ 7 + F2sina> Xp 1 - FxCOsa ?Y +— 2 in 2 2 F 2 F 2 2 F 2 2
.
lАB
Все переменные, входящие в это выражение, определяются так же, как и в группе Ас-сура первого вида. Силы F 2 n 1 и F 34 определяем
из условий ∑F x =0 и ∑F y =0 . Введем обозначения:
I n 1
- b 1 = F 21 c Os I ф 2 + - I + F n 2 cOs a Fin 2 (12)
a F 21
= arctan
a F 34
= arctan
+ ф 2 ;
FT

n
n
1 ^1

+ ф 3 .
Определение величины и направления силы F 23 . Эту силу определяем из условия равновесия всех сил, действующих на звено 2. Проекции этой силы на координатные оси можно найти из уравнений:
F 23 x = F 21 c Os a F 21 - Fin c Os a Fin 2 - F 2 CO s a F 2 ;
+ F 2 cOs a F 2 + Fin 3 cOs a Fin 3 + F3cOs a F 3 ;
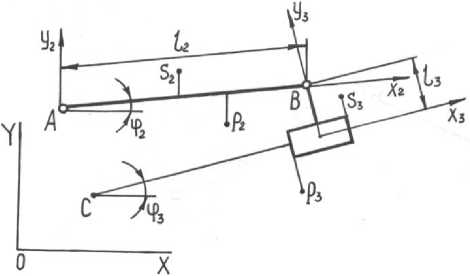
Рисунок 2. Расчетная схема группы Ассура второго вида - b 2 = F T sin | ф 2 + П | + F n 2 sin a Fin 2 - G 2 (13) + F 2 sin a F 2 + Fin 3 sin a Fin 3 + F 3 sin a F 3 - G 3.
Тогда получим систему линейных уравнений для F 2 n 1 и F 34
здесь S 3x , S 3y , P 3x , P 3y - координаты центра масс и точки приложения силы звена 3 в локальной си-
n I i П 1
F 21 cos ф 2 + F 34 cos I ф 3 + — I = b 1 ;
стеме координат, жестко связанной со звеном. Теперь определим
n I n 1
F 21 sin ф 2 + F 34 sin I ф 3 +— I = b 2 . (14)
Решение данной системы уравнений получаем по правилу Крамера:
( M 3 + Mm 3 + M )
h x =A------------ — - (20)
F 34
n
I n b 1 cos I ф 3 + —
I П b 2 sin I ф 3 + —
Определение величины и направления силы F 23 . Эту силу определяем из условия равновесия всех сил, действующих на звено 2. Проекции этой силы на координатные оси можно найти из уравнений:
F 23 x = F 21 cos « F 21 - Fin 2 co s « Fin 2 - F 2 c os « F 2 ;
I . П
COS ф 2 cos I Ф 3 + —
;
F 23y = F 21 sin « F 21 - F in 2 sin « Fin 2 - F , sin a F 2 (2r)
+ G 2.
F 34 =
I n
Sinф2 sin I Ф3 + — cosф2 b1
sin ф 2 b 32
Следовательно,
1 23 (V 23 x ) +( 23 y ) ;
a F 23
= arctan
(F A
23 y
V 23 x 7
I П
COS ф 2 cos I Ф 3 + —
Таким образом, определены все силы и
их направления в кинематических парах группы Ассура второго вида.
• I , П Sin ф 2 sin I Ф 3 +y
Тогда
F 21 =V ( f t ) + ( f» ) ;
aF = = arctan F 21
F T 1 — + Ф 2. n 2
-t 01
Точку приложения силы F 34 - h x определим из условия равновесия моментов
Z M c = 0 F 34 h x + M 3 + M n 3 + M ^ = 0 , (17)
где
M ^ = ( F n 3 sin ^ Fin 3 - G3 ) X 3 - F in 3 co ^ Fin3Y3
+ F 3 sin a F 3 XF 3 - F 3 cos a F3YF 3 , (18)
где X 3 , Y 3 , X F3 , Y F3 - определяются из следующих выражений:
X 3 = S 3 xcos ф 3 - ( S 3 y - 1 3 ) sin ф 3 ;
-
Y 3 = S 3 xsш ф 3 - ( S 3 y - 1 3 ) cos ф 3 ;
X f 3 = P 3x COS ф з - ( P 3 y - 1 3 ) sin ф з ; (19)
-
Yf 3 = P 3 xsi n Ф з - ( P 3 y - 1 3 ) coS Ф з ,
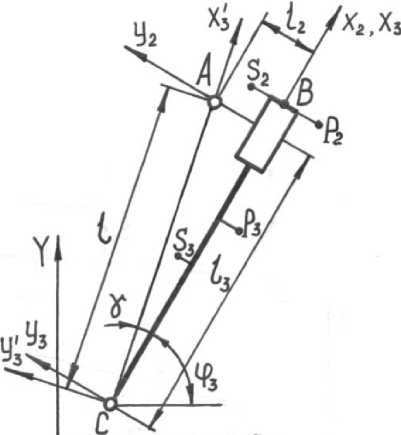
Группа Ассура третьего вида
Расчетная схема данной группы представлена на рисунке 3 [3,7].
Сначала определим вспомогательные величины
I1
-
1 = V 1 22 + 1 32 ; T = arctan — . (23)
-
2 3 V l 3 7
Определение силы F34. Данную силу определим по уравнению моментов относительно точки А, рассматривая равновесие двух звеньев: второго и третьего. Сначала определяем вспомогательные величины:
X 2 = S 2 xcos ф 2 - ( S 2 y - 1 2 ) sin ф 2;
-
Y 2 = S 2 xsш ф 2 - ( S 2 y - 1 2 ) cos ф 2 ;
X f 2 = P 2 x cos ф 2 - ( P 2 y - 1 2 ) sin ф 2 ;
Yf 2 = P 2 xsiW i - ( P 2 y - 1 2 ) cos ф 2 ; (24)
X 3 = - ( S 3 y - 1 3 ) sin ф 3 ( 1 3 cos ф 3 - 1 3 sin ф 3 )
+ S 3 xcoS Ф з ;
Y 3 = - ( S 3 y - 1 3 ) cos ф 3 ( 1 3 sin ф 3 - 1 3 cos ф 3 ) + S 3 xsin ф 3;
XF 3 = - ( P3 y - 1 3 ) sin ф 3 ( 1 3 cos ф 3 - 1 3 sin ф 3 ) + P x cos v 3;
Y F 3 = — ( P 3 y — 1 3 ) cos ф 3 ( 1 3 sin ф 3 — 1 3 cos ф 3 ) + P 3 xsi n ^ 3 .
Определяем моменты от сил, действующих на второе и третье звено раздельно
M £ 2 = ( Fu 2 s in a Fu 2 - G 2 ) X 2 — Fu 2 COS « Fu 2 Y 2 + F 2 sin a F 2 XF 2 - F 2 cos a F 2 Y F 2 + Mu 2 + M 2;(25)
M £ 3 = ( Fu 3 Sin a Fu 3 - G 3 ) X 3 - Fu 3 C0S a Fu 3 Y 3
+ F 3 sin a F 3 XF 3 - F 3 cos a F3 YF 3 + M u 3 + M 3 .
0 X
Рисунок 3. Расчетная схема группы Ассура третьего вида
Теперь можно определить F 3 4 и угол наклона этой силы:
£ 2 + £ 3 , п
F 34 = ^--—; a 34 = Ф 3 + Y + -. (26)
Силы F 3 n 4 и F 32 определим из условия баланса всех сил, действующих на звено 3: ( ∑Fx=0 и ∑Fy=0 ).Отсюда имеем:
cos( ф 2 + у )
cos I ф 3
Q =
п
+ —
F 3 4 =
Fт = 34
sin( ^ 2 + Y)
sin I ф 3

1 I . п b 1 cos I ф 3 + —
7 I , П b 2 sin I ф 3 + —
Q cos(ф2 + y ) b, sin(ф2 + y ) b2
где b1 = -Fin 3 cOsaFin 3
Q
,
;
- F 34 cos a F , - F 3 cos a F 3;
b 2 = G 3 - Fin 3 sin a Fin 3 - F3 T 4sin a F T
- F 3 sin a F 3.
Таким образом, получаем:
22 t
1 34 ^( 34 ) +( 34 ) ;
a F 34
= arctan
f к T\ F 34
Fn
V 34 7
+ Ф 2 + Y .
Так как F 23 =-F 32 , то остается только определить величину и направление силы F 21 .
Величина и направление силы F 21 . Эти значения силы определяются по условиям: ∑Fx=0 и ∑Fy=0 для второго звена.
F 21 x + Fin 2 c os a Fin 2 + F2 cos a F 2
+ F 23 cos a F 23 = 0 ;
F 21 y + F in 2 sin a Fin 2 + F 2 sin a F 2 (30)
+ F 23 sin a F 23 - G 2 = 0 ;
F 2, =V ( F 21 x ) 2 + ( F 2, y ) 2;
a F 21
= arctan

Определение h x . Точку приложения силы F 23 – h x определим из условия равенства нулю моментов сил, действующих на второе звено. Подробное определение точки приложения силы уже приводилось, поэтому ограничимся лишь окончательной формулой для определения величины h x
h x =- M : F 23 , (31)
где
M = ( Fin 2 si n a Fin 2 - G 2 ) X 2 - Fin 2 c os a Fin 2 Y 2 (32) + F 2 sin a F 2 X F 2 - F 2 cos a F 2 Y F 2 + M u 2 + M 2.
Группа Ассура четвертого вида
Схема расчета усилий в кинематических парах группы Ассура четвертого вида представлена на рисунке 4 [3]. Введены следующие определения: s 2 , s 3 , p 2 , p 3 - центры масс и точки приложения сил соответствующих звеньев данной группы Ассура.
П =
L . пA cos ф9 + к 2 J
I.. . п A cos Ф + к 21
sin
п
^ 2 + -
sin
п ф + -
Получаем решение:
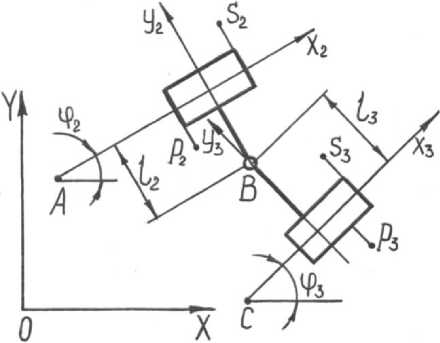
Рисунок 4. Расчетная схема группы Ассура четвертого вида
Определение F 21 и F 34 . Эти величины
определяются по условию баланса всех сил, действующих на группу Ассура:
I п A
F21 cos I ^ 2 + - I + F te 2 cOS « Fin 2 + F 3 cos ^ Fin 3
+ F2 cos a F 2
+ F3 cos a F 3
+ F 34 cos
п
= 0;
F 21
F 34 =
I п b 1 cos I ф 3 + —
I п b 2 s in I Ф 3 + -
П
cos
I п A sin I ф 2 + — I b 2
П
;
.
Определение величины и направления силы F 23 . Проекции силы F 23 на координатные оси можно получить из условия баланса всех сил на оси координат для звена 2:
F 23 , = - F2cos a Fin 2 - F2cos a F 2 - F 21 cos a F 21 ;
F23 y = G 2 - F21 sin a F 21 - Fin 2 sin a F 2 (36)
- F 2 sin a F 2 .
Следовательно
23 ^( 21 x ) +( 23 y ) ;
F 21 sin I ^ 2 + П L F 2 s in a Fn 2
a F 23
= arctan
+ F 2 sin a F 2 (33)
+ F n 3 sin a Fin 3 + F 3 sin a F 3 - G 2 - G 3
I п ]
+ F 34 sin I ф 3 + — I = 0.
Обозначим b1 =-( Fin 2 cOsaFin 2 + F2 cOsaF 2 + Fin 3 cOsaFin 3 +
- Ь 2 = Fin 2 sin a Fin 2 + F 2 c Os a F 2 + Fin 3 s in a Fin 3
+ F3sin a F 3 - G 2 - G 3;

к.1 23 x 1
Определение точки приложения силы F 23 – h x1 . Эта величина определяется по балансу моментов, действующих на звено 2. Предварительно определим вспомогательные величины
X 2 = S 2 xcos ф 2 - ( S 2 y - 1 2 ) sin ф 2 ;
-
Y 2 = S 2 xsi'n ф 2 - ( S 2 y - 1 2 ) cos ф 2 ;
X f 2 = P 2x Cos ф 2 - ( P 2 y - 1 2 ) sin ф 2 ; (38)
-
Y F 2 = P 2 х^1пФ2 - ( P 2 y - 1 2 ) cos ф 2 ;
M 2 Z = Mm 2 + M 2 ( F in 2 sin a F m 2 - G 2 ) X 2
- Fin 2 cos a Fin 2 Y 2 + F 2 sin a F 2 XF 2 - F 2 cos a F 2 Y F 2
Тогда hx 1 = M 2£ : F21 .
Определение точки приложения силы F 34 – h x2 . Определение аналогично определению h x1 .
Y3 = S 3 xsin ф 3 — ( S 3 y — 1 3 ) cos ф 3 ;
XF 3 = P 3 хСО5 Ф 3 — ( P 3 y — 1 3 ) s i n Ф з ;
Y f 3 = P 3 x Sin Ф з — ( P 3 y — 1 3 ) cos ф з ; (40)
Рисунок 5. Расчетная схема группы Ассура пятого вида Введя обозначения:
bi = — ( F in 3 cos a Fin 3 + F 3 cos a F 3 ) ;
b 2 = — ( F in 3 sin a Fin 3 + F 3 sin a F 3
^
G 2 — G 3 ) ;(43)
I n 1 n cos I Ф2 + — I cos I Ф3 + —
E =
.
I n 1 I n sin I Ф 2 + — I sin I Ф 3 + —
M 3 ^ = Min 3 + M 3 ( F in 3 s in a Fin 3
— Fin 3 cos a Fin 3 Y 3 + F 3 sin a F 3 XF 3
— G3 ) X3
— F 3 cos a F 3 Y F 3.
Тогда
h = -M ■ R h x M 3 ^ : F 34 .
Группа Ассура пятого вида
Расчетная схема данной группы представлена на рисунке 5 [3]. На рисунке введены обозначения: S 2 , S 3 , р 2 , р з - центры масс и точки приложения сил второго и третьего звеньев.
Определение значений сил F 21 и F 34 . Величины определяются по условию баланса всех сил, действующих на группу Ассура:
I П 1
F 32 cos I Ф 2 + - I + F in 3 cos a Fin 3 + F 3 COs a F 3
I n 1
+ F 34 cos I ф 3 + — I = 0 ;
I П I
F 32 sin I Ф 2 + - + Fn 3 sin a Fin 3 + F 3 sin « F 3
— G 2
—
G 3 + F 34 sin I Ф 3
П I
+ = 0 .
2 }
Получаем решение:
I n b1 cos I ф3 + —
I n b 2 sin I ф 3 + —
R
cos
E
;
si n I Ф 2 +tI b2
F 34 =
E
.
Определение h x1 и h x2 . Определим в начале вспомогательные величины
F 23 =F 23 ;
α F23 = α F23 +π ;
X 2 = S 2 xcos ф 2 — ( S 2 y — l 2 ) sin ф 2 ;
Y 2 = S 2 xsi'n ф 2 — ( S 2 y — 1 2 ) cos ф 2 ;
XF 2 = P2 xCOS Ф 2 — ( P 2 y
YF 2 = P 2 xSin Ф 2 — ( P 2 y
—
—
l 2 ) sin ф 2 ; (45)
l 2 ) cos ф 2 ;
M 2 Z= M in 2 + M 2 — ( F n 2 sin a Fin 2
— G 2 ) X 3
— F in 2 cos a Fin 2 Y 2 + F 2 sin a F 2 X f 2
— F 2 cos a F 2 Yf 2 .
Тогда:
h x =— M 2 Z : F 23 ;
X 3 =— S 3 ysi n Ф 3 — ( 1 23 cos ф 2 — 1 2 sin ф 2 ) + S 3 xcos ф 3 ;
Y 3 = S 3 ycos ф 3 — ( 1 23 sin ф 2 + 1 2 cos ф 2 ) + S 3 xsin ф 3 ;
XF 3 = — P 3 ysi'n ф 3 — ( 1 23 cos ф 2 — 1 2 sin ф 2 ) + P3 хсо&ф3;
Y F 3 = P3ycos ф 3 — ( 1 23 sin ф 2 — 1 2 cos ф 2 ) + P3xsi^n ф 3 ;
M 3 ^ = M in 3 + M 3 ( Fin 3 sin a Fin 3
X 3 — Fin 3 COs a Fin 3 Y 3
—
G 3 )
+ F3sin a F3 XF 3 — F3cos a F 3YF 3 .
Тогда:
M у + M y h x =--^ ; (47)
F 34
-
F21 x =- F 2 cos a F 2 - Fin 2 C0S « Fin 2 - F 23 c 0S « F 23 ;
F21 y = G 2 - F in 2 sin a Fin 2 - F 2 sin a F 2 - F 23 sin a F23
Тогда
F 2i = V( F 21 x ) + ( F 21. У ) . (48)
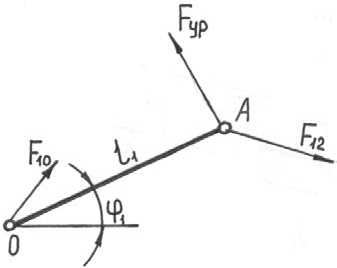
Рисунок 6. Расчетная схема начального звена
Начальное звено
Схема распределения сил, действующих на начальное звено, представлена на рисунке 6 [3].
Определение F ур . Определение этой силы производится по уравнению ∑M A =0 . Сначала определяем вспомогательные величины:
X 1 =l 1 cosφ 1 ; Y 1 =l 1 sinφ 1 ;
F 12x = F 12 cosα F12 ; F 12y = F 12 sinα F12 . (49)
Тогда:
Примечание. Если определяется кинетостатика механизма с параллельным закреплением двух групп Ассура на начальном звене, то в этом случае сила F12 является геометриче- ской суммой сил, действующих на начальное звено со стороны отброшенных групп Ассура. Ее определение не вызывает трудностей:
-
F12x = F12C0S a F 12 + F 14 C0S a F 14 ;
F 12 y
_ F12sin a F 12 + F14sin a F 14 .
F _ J 12 x -*1 ' 12 y v L1
F УР = z l1
П и aFyp = Ф1 + ~ . (50)
Тогда
Определение величины и направления силы F 10 . Эти значения определим из условия равенства нулю всех сил, действующих на звено 1.
F 2 =V ( F 2 x ) 2 + ( F y ) 2 ;
a F 12
_ arctan

F
V 12 x 7
Тогда
F 10 x _- ( FypC0S a Fyp + F 12 x ) ;
F 10 y _- ( FypSin a Fyp + F 12 y ) . (51)
F 0 _ V ( F o x ) 2 + ( F 0 , ) 2; .
здесь F 12 - сила, действующая на начальное звено от первой группы Ассура; F 14 - сила, действующая на начальной звено от второй группы Ассура.
Список литературы Математическая модель кинетостатического расчета плоских рычажных механизмов
- Мацюк И.Н., Шляхов Э.М. Определение кинематических и кинетостатических параметров плоских стержневых механизмов сложной структуры//Современное машиностроение. Наука и образование: Междунар. науч.-практ. конф. СПб., 2013. С. 788 -796.
- Мкртычев О.В. Компьютерное моделирование при силовом расчёте плоских механизмов//Теория Механизмов и Машин. 2013. №1. Т. 11. С. 77-83.
- Сидоренко А.С., Софин А.А., Белоконев А.А. Нахождение усилий в статически определимых кинематических цепях (группы Ассура)//Молодежные чтения памяти Ю.А. Гагарина: мат. Межвузовск. науч.-практ. конф. Воронеж, 2015. Ч. 3. C. 158-161.
- Доронин Ф.А., Доев В.С. Исследование движения плоского механизма с помощью пакета Mathcad//Теория Механизмов и Машин. 2011. №1. Т. 9.C 77-87
- Александров В.В., Александрова О.В., Буднинский М.А., Сидоренко Г.Ю. Об экстремалях кинематического управления движением//Вестн. Моск. ун-та. Сер. 1. Математика. Механика. 2013. № 3. С. 38-46.
- Комов А.А., Потапов А.И., Тарарыкова И.В., Шахов С.В. Математическое описание процесса микрофильтрации суспензии в трубчатом канале//Сременные наукоемкие технологии. 2014. № 5-1. С. 164-165
- Кретов И.Т., Попов Е.С., Потапов А.И., Попов Д.С Математическое моделирование процесса микрофильтрации//Материалы LI отчетной научной конференции преподавателей и научных сотрудников ВГУИТ за 2012 г. 2012. С. 42.
