Математические модели центров равнодавлений в звездных системах

Автор: Гуревич Г.С., Лутманов С.В., Пенский О.Г.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика
Статья в выпуске: 3 (54), 2021 года.
Бесплатный доступ
Предлагаются математические модели, позволяющие вычислять координаты центров равнодавлений в звездных системах и решать обратную задачу определения источников излучения материальной субстанции при формировании макротел. Показывается не единственность решения прямой и обратной задач.
Математическая модель, звездная система, центр равнодавлений, сила, давление
Короткий адрес: https://sciup.org/147245521
IDR: 147245521 | УДК: 530.12:531.551 | DOI: 10.17072/1993-0550-2021-3-25-30
Mathematical models of centers of equal pressure in stellar systems
Mathematical models are proposed that allow calculating the coordinates of the centers of equal pressure in stellar systems and solving the inverse problem of determining the radiation sources of a material substance during the formation of macro-bodies. It is shown that the solutions of direct and inverse problems are not unique.
Текст научной статьи Математические модели центров равнодавлений в звездных системах
Звезды в галактике, излучая материальную субстанцию, образуют центры равнодав-лений, в которых рождаются макротела.
В работе [1] дано следующее определение центра равнодавления: "Центр равнодав-ления – это точка в пространстве, где равнодействующая сил, порожденная давлением материальной субстанции, излучаемой другими точками (звездами), равна нулю".
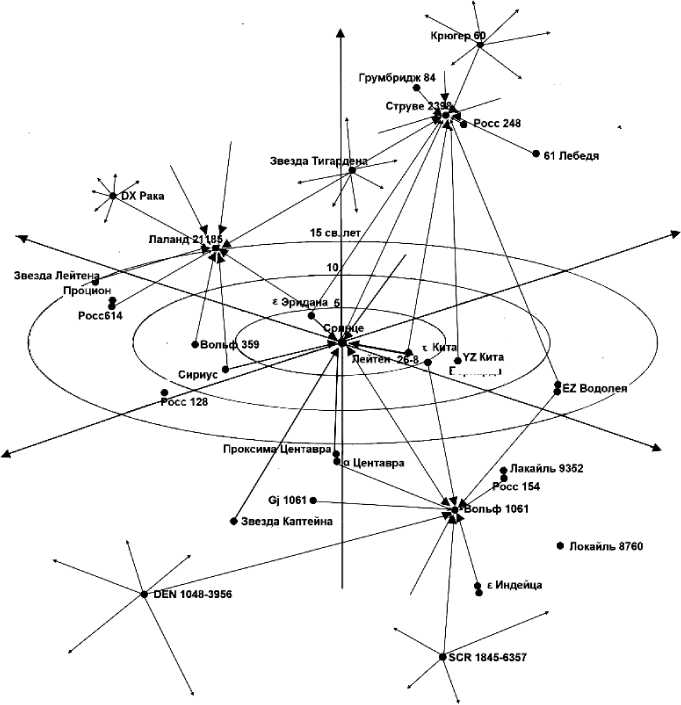
Принцип формирования центров равно-давлений звездами в интервале 5, 10 и 15 световых лет показан на рисунке.
В работах [2–4] исследован процесс образования центров равнодавления и приведены иллюстрации образования центров равно-давлений в звездных системах.
В статье [5] приведен пример, показывающий, что центров равнодавлений в одной и той же звездной системе может быть несколько.
В настоящей статье предлагаются математические модели, позволяющие вычислять координаты центров равнодавлений в звездных системах, исходя из известных координат излучающих материальную субстанцию звезд (прямая задача), а также описан способ вычисления координат излучающих материальную субстанцию звезд, исходя из известных координат центра равнодавления (обратная задача).
Заметим, что существует множество систем координат, позволяющих описывать расположение макротел во Вселенной [6].
В дальнейшем для простоты математической формализации мы будем использовать декартову систему координат с центром координат аналогичным эклиптической системе [7].
Использование декартовой системы нисколько не умаляет общность решаемых ниже задач, так как существующие координаты звезд легко переводятся из одной системы координат в другую.
ПРОСТРАНСТВЕННОЕ РАСПОЛОЖЕНИЕ ЗВЁЗД В ИНТЕРВАЛЕ 5,10 И 15 СВЕТОВЫХ ЛЕТ
Бернарда
Обозначения
к , • • •, кт е R 1 — коэффициенты пропорцио-
Введем следующие обозначения.
Пусть

v = V2
V v3 )
е R3 -
центр равнодавления (центр);
нальности;
v 2
( v ^
V v3 J
=Z uv i=1
—
символ ска-
лярного произведения векторов u , v е R 3;
II u — v|l = V (u — v, u — v
Z ( u— rf
= 1
—
P о R 3 — область возможного положения центра;
норма разности векторов u , v е R 3;
IIF (v )||= ^ 2,i'MV", "} — v — u
величина
силы, действующая со стороны i — го источника на точку, находящуюся в центре v е R 3;
e i ( v ) = II v ^11 ’ i e{ 1’’”’ m } —
Iv -u II вектор, направленный от i — го центру v g R3;
единичный источника к
^ min,
u G P o R 3.
F ( v ) = l I F ( v )|| - e i ( v ) = I
1 (i)( k v—u
-----i—- • 7-----— = k.--. i
II v — u^\2 |v — u“| i |v — u "f
-, m } -
вектор силы со стороны i — го источника, действующей на точку, помещенную в центр v g R 3;
Нулевое значение целевой функции на оптимальном векторе v0 g R3 будет означать, что прямая задача решена и вектор v0 g R3 представляет собой радиус-вектор искомого центра. Заметим, что в случае отсутствия ограничений, т. е. когда P = R3, у задачи все гда имеется решение v0 = ^
mm
F ( v ) = E F i ( v ) = E k i • i = 1 i = 1

—
вектор равнодействующей всех сил со стороны источников, приложенных к точке, помещенной в центр v g R 3.
Прямая задача (задача 1)
Пример 1
Дано:
( 1 '
m = 4, u ( 1 ) = 0
0 k о J
( 1 Л
( 0 Л
( о Л
Дано:
и ( 1 )- u
Л (1)Л u1
u ( 1 )
u ( 1 ) k 3 J
g R 3,---, u(m ) —
, ,F= 1
, u '”= 0
k о J
k 1 J
, u ( 4 ) = 1 , k 1 = k 2 = k 3 = k 4 = 1 ,
k 1 J
P Ч
Хг , X 2, X 3 G
, ,
( m ) ui
u
u k -
' ( m )
, ( m )
3 J
g r 3, v-
k m G R 1 , P О R 3 .
v 1
x
Вектор равнодействующей записывается в виде
F ( v ) = E F i ( v ) = E k i'
Найти центр v 0
v 2 0

G P
( i ) v — u ’
I v — u ( i )|
v =
из условия
равенства нулю равнодействующей F ( v ) .
Целевая функция имеет вид
All2 _ / V v — ui V v — ui
I v — ui lf’ i =1 l v — u-|3
x 1
k x 3 J
.
.
Решение:
Вектор v0 g R 3 будем искать как решение следующей задачи математического программирования на условный экстремум:
mm
II F ( v )ll =te F ( v ) • E F ( v )) =
\ i — 1 i = 1 /
Пример решался в среде пакета "Mathe-matica".
Для решения задачи математического программирования применялась команда
NMinimize[{ F [x1,x2,x3],-1 Результаты расчетов: {2.90892*10Л-30, {x1 -> 0.5, x2 -> 0.5, x3 -> 0.5}}. Как видно из приведенных расчетов, значение целевой функции в найденной точке mm IF ( v ” )| — ZF ( v" ),ZF( v ”) — i=1 i=1 v0 ' 0.5 ' 0.5 . 0.5, равно 2.90892 x10 30, т. е прак- m ZV i—1 0 (i) v — w’ I v0 — и(‘) m p Z V i —1 v0 — и 1) \ . ------- ^ min, Iv0 — U «I тически ноль. Следовательно, точка v0 Л0.5 ^ 0.5 совпадающей с целевой функцией прямой задачи. Однако здесь ее переменными явля- является искомым центром. 0.5 ются Обратная задача (задача 2) Используя обозначения предыдущего пункта, сформулируем задачу, обратную к задаче 1. Дано: и (1) -и (и u ( (—) А U и (’) u ,-, и-) — (—) U (1) и (—) U V 3J V 3J , а пара- v v v0 v v € R3, k,•••,km € R\ p c R3, i e{1,---,—}. Найти: (1) и\7 u (1) = и u u V - •S’ -(1) 3J п (—) € P,---,U 1 — для которых mm F (v 0) —Z F (v 0) —Z kr метры v0 v v € R3считаются известными. Ограничения на переменные имеют вид и (1) = и— (—) U1 u u V < m ■ 3-)J € Pm , 0 (i) v — w} I v0 — u 2 ‘) я — 0. Здесь p c R3, i €{1, • • •, —} — области предположительного расположения источников. Очевидно, что если допустить свободное расположение источников во всем пространстве R3, то задача 2 будет иметь бесконечно много легко строящихся решений. Решение: Вектора U1 ( (—) A U1 и (1) -и u u v ■ '(1) 3J (—) € P,---,U ’ — u u V ' 2m) , (m) '3 J GPm будем искать как решение задачи математического программирования на условный экстремум, с целевой функцией U1 (—) U1 u u V '(1) ' (1)'3 J (—) € P,---,U 1 — u u V , 2-) ■ 3■) € P— - Задача 2 считается решенной, если оптимальное значение целевой функции равно нулю. Пример 2 Дано: v0 Л0.5 0.5 €R3, p,---,P4 cR3, . 0.5, U11 P — ’ U12 (U1 P2—^ p 4 — 1)2 + (и» )2 +(U13 )2 < 14, V U13 J u21 u22 u ( U 21 ) +( U 22 — u31 u32 u (U31 )2 +(U32 )2 +(U33 — ( u 41 - 1) +(u42 - 1) +(u43 - 1) - 12 ’ Представляет интерес решение прямой задачи, в которой положение источников определяется векторами _ (10) (20) (30) (40) _ u ,u , u ,u , найденными как реше- Вектор равнодействующей записывает- а множество ся в виде F (v0) = Z k. i—1 0 (i) v — u I v 0 — u «IГ ние обратной задачи, совпадает с u 0 = u ( ah u( ) f (4 h u1 u (1) u2 u (4) — U (4) u2 u У к 3 7 u 54) к 3 7 Целевая функция имеет вид Пример решался в среде пакета "Mathe-matica". ограничениями исходной задачи 1. Результаты расчетов: {1.51618*10^-20, {x1 -> 0.500006, x2 -> 0.500002, x3 -> 0.5}}. Как видно из расчетов, значение целевой функции в найденной точке (0.500006 v0 — 0.500002 0.5 Для решения задачи математического программирования применялась команда NMini- mize[{F[u11,u12,u13,u21,u22,u23,u31,u32,u33,u 41,u42,u43] равно 1.51618х10 20 , т. е. практически ноль. Легко видеть, что имеет место совпадение полученных координат центра с теми, которые были вычислены при решении исходной прямой задачи в примере 1. Результаты расчетов: {3.62867*10^-16, {u11 -> 1.17403, u12 -> 0.102601, u13 -> 0.556784, u21 -> -0.571177, u22 -> 0.885622, u23 -> 0.786926, u31 -> 0.14806, u32 -> -0.411013, u33 -> 0.401974, u41 -> 0.321408, u42 -> 1.26398, u43 -> 0.405633}}. Как видно из расчетов, значение целе- вой функции в найденных точках ^ 1.17403 Л ' —0.571177^ и (10) -u — 0.102601 , u(20) — 0.885622 , к0.556784J к 0.786926 7 ^ 0.14806 Л " 0.321408^ u(30) — —0.411013 . u(40) — 1.26398 к0.401974 J к 0.405633J равно 3.62867 х10 16 3.62867*10Л-16, т. е практически ноль. Следовательно, точки (10) (20) (30) (40) u ,u ,u u являются искомыми источниками. Найденные точки не совпадают с теми, которые фигурировали в условиях прямой задачи примера 1. Отсюда следует не единственность решения обратной задачи. Заключение Таким образом, в настоящей статье впервые предложены математические модели, позволяющие решать прямую и обратную задачи определения координат центров равно-давлений и источников формирования центров равнодавлений. Другие группы звезд образуют другие центры равнодавлений. Звезды могут входить одновременно в другие группы звезд, образуя другие центры равнодавлений.
Список литературы Математические модели центров равнодавлений в звездных системах
- Гуревич Г.С. Математическое моделирование процессов в гравитационном поле макротел // Вестник Пермского университета. Математика. Механика. Информатика. 2021. Вып.1(52). С.16-24. EDN: RMITCB
- Гуревич Г.С., Каневский С.Н. Материя, пространство, время, гравитация. М.: ИПО "У Никитских ворот", 2009. 248 с. 978-5- 91366-112-8. ISBN: 978-5-91366-112-8 EDN: QJWBQZ
- Гуревич Г.С., Каневский С.Н. Чем Солнце тянет Землю? М.: ИПО "У Никитских ворот", 2012. 72 с. ISBN: 978-5-91366-376-4 EDN: QJZJBJ
- Каневский С.Н., Гуревич Г.С. Астродинамика М.: ИПО "У Никитских ворот", 2009. 384-с. ISBN: 978-5-91366-081-7
- Гуревич Г.С., Пенский О.Г. О существовании центров равнодавлений, являющихся центрами концентрации материальной субстанции // Вестник Пермского университета. Математика. Механика. Информатика. 2021. Вып. 2(53). С. 25-28. DOI: 10.17072/1993-0550-2021-2-25-28 EDN: FUIBMA
- Серапинас Б.Б. Геодезические основы карт. URL: http://www.geogr.msu.ru/cafedra/karta/docs/GOK/gok_lecture_2.pdf (дата обращения 16.06.2021).
- Эклиптическая система координат. URL: https://vuzlit.ru/511614/eklipticheskaya_sistema_koordinat (дата обращения 16.06.2021).
