Математические основы робототехники

Автор: Архипова Е.П.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Образование и педагогика
Статья в выпуске: 6 (24), 2017 года.
Бесплатный доступ
Разрабатывая автоматизированные системы, робототехник опирается на знания электроники, механики, кибернетики и других дисциплин. Школьник же при решении подобных задач ориентируется на сведения, полученные на уроках физики, математики и информатики. Интеграция этих наук на занятиях по робототехнике помогает детям открыть их для себя на новом уровне, в результате чего школьники совершенствуют свои учебные результаты.
Система координат, мобильный робот, прямолинейное движение, дифференциальный привод, реечно-зубчатый привод, двигатель, радиус
Короткий адрес: https://sciup.org/140271789
IDR: 140271789
Текст научной статьи Математические основы робототехники
Для того чтобы математически описать движение мобильного робота нам потребуется определить системы координат. Введем две системы координат - мировую систему координат W (будем считать что он неподвижна в пространстве), и система координат робота R , которая перемещается в пространстве и остается неподвижной относительно самого робота (рис. 1).
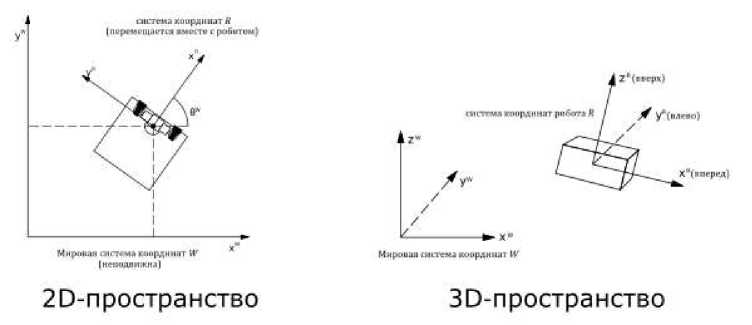
Рис. 1. Системы координат
Если предположить, что робот ограничивается перемещением на плоскости [1], его местоположение может быть определено вектором состояниях, состоящим из трех параметров:
f x 1
X = у
16 J хи у определяют местоположение предопределенной точки «центра робота» в мировой системе координат.
9 определяет угол поворота между системами координат (угол между осями X W и X R ).
Две системы координат совпадают в момент, когда центр робота находится в начале координат и x = y = 6 = 0 .
Получая перемещения робота в некоторые моменты времени, мы можем найти весь путь, пройденный роботом, просуммировав эти значения, или перейдя к пределу (при стремлении количества измерений ^да) - путем их интегрирования.
При движении на плоскости имеем три степени свободы для определения положения, представленные ( x , у , 6) при п < 6 < п .
Рассмотрим робота, который может только двигаться вперед или поворачиваться на месте:
При прямолинейном движении робота на расстояние D новое состояние будет выражено как:
x new y"'
V 6 new /
^ x + D cos 6
= у + D sin 6
А
V 6 7
Если присутствует только вращательное движение, при повороте на угол
а:
x new
new
А
V new 7
Г x )
у
V 6 + а,
Рассмотрим математические принципы работы некоторых видов приводов.
1)дифференциальный привод
Робот с дифференциальным приводом имеет два мотора, по одному на каждое колесо. Изменение направления движения достигается за счет разных скоростей (отсюда и название - дифференциальный) [2]:
-Для прямолинейного движения колеса должны вращаться с одинаковыми скоростями.
-Для того, чтобы робот развернулся на месте, необходимо установить скорости одинаковыми по модулю, но направленными противоположно.
-Другие комбинации скоростей приводят к движению по дуге (рис. 2).
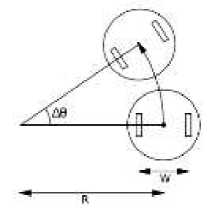
Рис. 2. Движение по дуге
Обозначим скорости колес (линейные скорости с которыми они «покрывают» поверхность) V L и V R - для левого и правого колес, соответственно, и W расстояние между колесами.
-Прямолинейное движение, если V L = V R .
-Разворот на месте, если V L = - V R .
-
-В более общем случае - движение по дуге
Для того, чтобы найти радиус R криволинейного пути, рассмотрим период движения dt , в течении которого робот движется вдоль дуги окружности, имеющей угол Л9 .
-Левое колесо:
W пройденное расстояние = VLdt; радиус дуги = R - —
-Правое колесо:
W пройденное расстояние = VRdt; радиус дуги = R + —
-
-Обе колесные дуги имеют в основании один и тот же угол Л9 :
-
V, A t VR A t W
Ав = L ™r = R „л ^ — ( VL + Vr ) = R^Vr - V ) ^
WW2LR RL r — r +-- 22
^ R = W ( V L + V R )
2 ( V r - V l )
( VR - V )A t Ав = (-^ L^—
W
2)Реечно-зубчатый привод
Такой тип роботов имеет два мотора - один для движения, другой для руления [3].
-
- Не может нормально развернуться на месте.
-
- При постоянной скорости и угле поворота движется по дуге окружности.
-
- В четырехколесной схеме необходим задний дифференциал и переменная связь («Принцип Аккермана») на рулевые колеса (рис. 3).
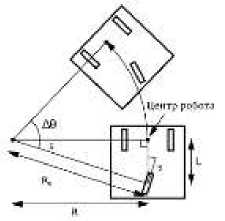
Рис. 3. Круговое движение трехколесного робота
При условии, что отсутствует боковая пробуксовка колес, пересечем оси передних и задних колес, чтобы сформировать прямоугольный треугольник, и в результате получим:
R =
L tg (s)
Радиус траектории, которую описывают задние колеса:
R
d
L sin( s)
За время ^t расстояние вдоль этой дуги окружности, пройденное приводными колесами равно vAt , поэтому угол Л9 на который повернется робот:
д<9_ V A t _ V A t sin( s )
R d
L
R = — tg(s )
3)Зубчатые передачи
Двигатели постоянного тока, как правило, обладают высокой скоростью вращения и низким крутящим момент, поэтому зубчатая передача практически всегда необходима для управления роботом (рис. 4).
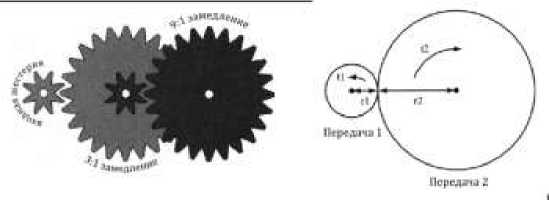
Рис. 4. Передачи
Если Передача 1 имеет крутящий момент й, она оказывает тангенциальную силу F = — на Передачу 2. r1
Крутящий момент Передачи 2 поэтому t2 = r2F = r2 tv r1
Изменение угловой скорости между Передачей 1 и Передачей 2
вычислим, рассмотрев скорость в точке где они соприкасаются [4]:
-Когда маленькая шестерня приводит в движение большую, второе зубчатое колесо будет иметь более высокий крутящий момент и меньшую угловую скорость пропорционально соотношению зубьев.
-Для достижения комбинированного воздействия шестерни можно объединять в цепочки.
r
V = wxrx = wr ^ w2 = 1 Wj r2
Список литературы Математические основы робототехники
- Маркеев А.П. О динамике катящегося тела и некоторых курьезных свойствах вращающегося волчка // Соросовский Образовательный Журнал, 2008. № 9. С. 96-103.
- Девянин Е.А. О движении колесных роботов // Доклады научной школы конференции «Мобильные роботы и мехатронные системы». Москва, 1-3 декабря 2009 года. М.: НИИ механики МГУ, 2009. С. 169-200.
- Белых В.Н. Элементарное введение в качественную теорию и теорию бифуркаций динамических систем // Соросовский Образовательный Журнал. 2005. № 1. С. 115-121.
- Мартыненко Ю.Г. Инерциальная навигация // Там же. 2010. № 8. С. 102-108.
