Математическое моделирование движения автотранспортных потоков методами механики сплошной среды. Двухполосный транспортный поток: модель Т-образного перекрестка, исследование влияния перестроений транспортных средств на пропускную способность участка магистрали

Автор: Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Кокорева А.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Статья в выпуске: 4 (8) т.2, 2010 года.
Бесплатный доступ
Представлено дальнейшее развитие модели движения автотранспортных потоков метода- ми механики сплошной среды. Построена новая модель двухполосного транспортного пото- ка, учитывающая перестроения транспортных средств и основанная на подходе механики многофазных сред. В качестве примера использования модели двухполосного движения проведено численное моделирование Т-образного перекрестка, образованного примыкани- ем второстепенной двухполосной дороги косн овной также двухполосной трассе. Движение на этом перекрестке регулируется светофором с тремя фазами работы.
Короткий адрес: https://sciup.org/142185696
IDR: 142185696
Текст научной статьи Математическое моделирование движения автотранспортных потоков методами механики сплошной среды. Двухполосный транспортный поток: модель Т-образного перекрестка, исследование влияния перестроений транспортных средств на пропускную способность участка магистрали
Первые математические модели движения автотранспортных потоков с точки зрения механики сплошной среды опубликованы Лайтхиллом и Уиземом [1], а также Ричардсом [2]. Анализ основных полученных ими результатов дается в известной монографии Уизема [3]. С развитием вычислительной техники для изучения движения автотранспортных потоков стало широко применяться численное моделирование. С современным состоянием вопроса можно ознакомиться, например, прочитав учебное пособие по математическому моделированию транспортных потоков [4].
Изучение динамики автотранспортных потоков началось в нашей стране в конце 70-х годов XX века на механико-математическом факультете МГУ им. М.В. Ломоносова в связи с подготовкой к Олимпийским играм 1980 г. в Москве. Результаты этих исследований неоднократно докладывались В.Н. Беловым на научно-исследовательском семинаре И.Н. Зверева. В настоящее время изучение автотранспортных потоков на факультете ведется под руководством Н.Н. Смирнова и А.Б. Киселева на кафедре газовой и волновой динамики и в лабораториях волновых процессов и динамики деформируемых сред. Эти исследования неоднократно поддерживались грантами Правительства г. Москвы и Правительства региона г. Брюсселя (Бельгия).
Существуют три традиционных «механических» подхода к моделированию движения транспортного потока. Микроскопические модели описывают воздействие предыдущего автомобиля на следующий за ним при помощи обыкновенных дифференциальных уравнений, основанных на ньютоновской механике [5, 6]. Макроскопические модели основываются на уравнениях газовой динамики [1, 7, 8]. Мезоскопические модели представляют собой промежуточное звено между двумя предыдущими моделями. Они основаны на кинетических уравнениях больцмановского типа [9]. В рамках макроскопического, или континуального, подхода для описания движения потока транспорта используется уравнение неразрывности. В качестве второго уравнения ряд исследователей использовали эмпирическое соотношение, связывающее плотность и расход [2, 10]. Такая система позволяет описывать движение локальноравновесного потока. Для описания неравновесного потока было предложено уравнение движения, учитывающее стремление водителя привести свою скорость в соответствие с некой равновесной скоростью [11]. Однако такой подход не позволяет адекватно описывать возникновение ударных волн плотности потока автомашин. Существующие газодинамические модели не учитывают влияние движения впереди идущих транспортных средств на движение автомобилей, следующих позади, и стремление водителя привести свою скорость в соответствие с максимально безопасной скоростью. На решение этих проблем и направлена предлагаемая модель. Ранее проведенные исследования, использующие ее, опубликованы в работах [12--19].
-
II. Модель движения транспортного потока по автомагистрали
Рассмотрим однонаправленный поток машин по однополосной дороге. Пересечение с другими дорогами и наличие светофоров будет учитываться соответствующими граничными условиями. Введем Эйлерову систему координат x вдоль автомагистрали в направлении движения потока и время t. Среднюю плотность потока р(x,t) определим как отношение площади полосы движения, занятой транспортными средствами, к площади всего рассматриваемого участка полосы движе- ния:
Str hn^ n^
Р = "S = hL = L
где h — ширина полосы движения, L — длина контрольного участка дороги, ^ — средняя длина транспортного средства с минимальным расстоянием между стоящими автомобилями, n —количество транспортных средств на контрольном участке. Так введенная плотность является безразмерной величиной и изменяется в интервале 0 < р < 1.
Введем скорость потока v ( x,t ), которая может изменяться в пределах 0 ^ v ^ v max , где v max — максимально разрешенная скорость движения на магистрали вне систем регулирования дорожного движения. Из определений следует, что максимальная плотность р = 1 соответствует ситуации, когда машины располагаются практически вплотную («бампер в бампер»). В этом случае естественно принять v = 0, то есть на дороге образовалась «неподвижная пробка».
Условно называя «массой», сосредоточенной на участке длины L , величину
L m=1 *
можно записать закон изменения «массы» на автомагистрали. Для непрерывного потока машин будет иметь место уравнение неразрывности:
др + д ( pv ) = 0 ∂t ∂x
Запишем уравнение динамики транспортного потока, точнее, уравнение изменения режима движения. Режим движения транспортных средств на дороге определяется следующими основными факторами: реакцией водителя на изменение дорожной обстановки и предпринимаемыми им активными действиями, откликом транспортного средства на действия водителя и техническими характеристиками транспортных средств. При разработке модели динамики транспортных средств были сделаны следующие основные предположения:
-
• Модель призвана описывать усредненное движение множества транспортных средств, а не движение каждого автомобиля в отдельности. Вследствие этого модель оперирует с усредненными характеристиками транспортных средств, не учитывая индивидуальных различий мощности, инерции, тормозного пути и т.п.
-
• Модель предполагает в среднем адекватную реакцию всех водителей на изменение дорожной обстановки, а именно: предполагается, что, видя красный сигнал светофора или знак ограничения скорости, например, перед «лежачим полицейским», или скопление машин перед ним, водитель замедляет движение до последующей полной остановки или до допустимой скорости, а не продолжает ускоряться, чтобы впоследствии применить режим экстренного торможения.
-
• Предполагается, что подавляющее большинство водителей соблюдают правила дорожного движения, в частности, не превышают максимально допустимого скоростного режима, разрешенного на дороге, и выдерживают безопасный интервал между транспортными средствами в зависимости от скорости движения. Кроме того, движения транспорта задним ходом нет.
Тогда уравнение изменения скорости запишется в следующем виде:
dv dt = a ’
a = max {—a ; min {a+; a'}};
x +Δ
, (1 — CT) V (P) — v
a = sap + ^-д ap (t,y) dy +------; (3)
x
k2 dp aρ ρ ∂x.
Здесь a — ускорение транспортного потока; a + — максимально возможное ускорение разгона; a- — ускорение экстренного торможения; величины a + и a - положительны и определяются техническими характеристиками транспортного средства. Д — «расстояние принятия решения», то есть длина участка магистрали перед участником движения, где находятся транспортные средства, на характер движения которых реагирует рассматриваемое транспортное средство, σ — безразмерный параметр (0 ^ ст ^ 1), характеризующий «вес» локальной ситуации по сравнению с ситуацией на некотором расстоянии впереди автомобиля. Параметр к > 0 является, как было показано в работах [8, 12, 13], скоростью распространения возмущений («скоростью звука») в транспортном потоке. Параметр τ имеет смысл времени задержки, обусловленной конечностью скорости реакции водителя на изменение дорожной обстановки и техническими характеристиками транспортного средства. Этот параметр отвечает за стремление водителя привести скорость автомобиля в соответствие с максимально безопасной скоростью движения V ( р ) для плотности потока р [8, 12, 13]. В зависимости от того, требуется ли для достижения максимальной безопасной скорости V ( р ) притормаживать или разгоняться, значение параметра τ
ТРУДЫ МФТИ. — 2010. — Том 2, № 4 может быть различным:
( т + V(р) < v, 1 тV(р) > v.
Полученная система (5) двух квазилинейных уравнений с неизвестными ρ,v является гиперболической. Условия вдоль характеристик C + и C - в плоскости ( x,t ) следующие:
В выражении (3) для ускорения транспортного потока а' первое слагаемое отвечает за влияние на поведение водителя локальной ситуации, второе — за влияние ситуации вперед по потоку, а третье — за стремление водителя привести свою скорость в соответствие с максимально безопасной скоростью. Если принять а = 0, то выражение для ускорения (3) примет следующий вид:
C+ : dx = v + k,pdv = —kdp; C- : dX = v — k,pdv = kdp.
а '
x +Δ
= Д | a p ( ty ) dy +
x
V(Р) - v τ
.
То есть ускорение зависит только от величины ускорения на участке длины Д, где Д — расстояние принятия решения, и от стремления водителя привести свою скорость в соответствие с максимально безопасной скоростью. При а = 1 выражение (3) принимает следующий вид:
а — ap +
V(р) — v
τ
Теперь ускорение зависит от локальной ситуации, а также от третьего слагаемого. Конкретные значения описанных выше параметров, использовавшихся при математическом моделировании, будут приведены ниже.
Таким образом, для описания динамики автотранспортного потока по однополосной дороге из (1) и (2) получается система двух квазилинейных уравнений в частных производных в дивергентной форме:
Полученные выше характеристики несут информацию о дорожной ситуации соответственно по потоку и против него.
Транспортные потоки и существующие системы организации дорожного движения специфичны тем, что распространение информации происходит однонаправлено — навстречу потоку. Тогда для волн, распространяющихся влево, навстречу потоку с постоянными параметрами, имеет место интеграл Римана, полученный из соотношения на характеристике C - (6):
v — v 0 = k —. (7)
Скорость v ( р ) определяется из условия зависимости скорости автомобиля v от плотности потока ρ для условий простой волны, возникающей при начале движения потока с места при условиях р о = 1 и v = 0, с учетом ограничения на максимально допустимую скорость движения ( v a v max ) получим выражение для максимально безопасной скорости движения:
V ( р ) = {—k ln p,v < v °ях: v °,, ,/и ^ v °,,„ }. (8)
max max max
∂ρ ∂ ( ρv )
dt + Эх, О;
∂ ( ρv ) ∂ ( ρv 2 )
dt + дх ра.
∂x
где ускорение a определяется тремя последними формулами (3).
II.1. Исследование основных характеристик системы уравнений, предлагаемой для описания транспортного потока
Модель с постоянной скоростью распространения возмущений. Рассмотрим случай, когда параметр k в формулах (3), (4) постоянен и не зависит от скорости и плотности потока. Данная модель обладает высокой степенью точности,
когда скорость потока превосходит скорость распространения возмущений. Рассмотрим случай, когда а = 1, а т = го . Тогда система (4) примет
вид
др + d ( pv ) =0; dt Эх ’
d (Рv) + d (Рv 2) = —к 2 Эр ∂t ∂x ∂x .
Оценка величины скорости распространения возмущений k сделана в работе [13], исходя из следующих соображений. Пусть, начиная движение из состояния покоя ( v = 0 ,р = 1) и ускоряясь до скорости v m 0 ax , поток достигает при этом максимально допустимой плотности р * , гарантирующей безопасность движения. Под безопасной плотностью понимается такая плотность, при которой расстояние между машинами не меньше тормозного пути X ( v ). Тогда
р* = (1+ X (vmax)/I) - 1, k = vmax ln-1(1 + X (vmax)/^).
При vmax = 80 км/ч тормозной путь автомобиля типа ВАЗ составляет 45 м, что при средней длине автомобиля (с учетом минимального расстояния между стоящими автомобилями) ^ = 5 м дает скорость распространения слабых возмущений к = 35 км/ч. Для такой величины v°омакси-max мально возможная безопасная плотность потока равна р* = 0,1. Величины максимальных ускорений для автомобилей данного класса составляют а+ = 1,63 м/с2 и а- = 5,5 м/с2.
Оцененная таким образом «скорость звука» k хорошо согласуется с экспериментальными данными, приведенными в работе [20].
Переменная скорость распространения возмущений. Рассмотрим случай, когда параметр k в формулах (3), (4) зависит от скорости
v и плотности потока ρ . Предположим, что транспортному средству требуется время τ p для реакции на изменение дорожной обстановки впереди по потоку: к = У/т р , где т р — время реакции водителя, 1 ' — расстояние между транспортными средствами (рис. 1). По определению плотности У = t/р , следовательно, к = к 1 /р , где к 1 = У/т р .
В предложенной модели предполагается, что v = 0 при р = 1. Таким образом, получаем зависимость для скорости потока:
v = к1
(р—1).
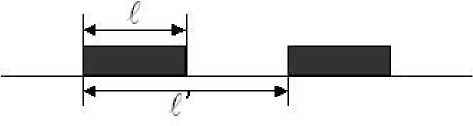
Рис. 1
В модели принимается, что v = к о — к 1 при р = р к . Тогда из (11) получаем следующую зависимость для скорости потока:
v = ко - к1
— к о lnf р) . ρk
Анализ наблюдений за движением потока транспорта показал [20, 3], что при небольшой плотности потока возмущения распространяются с постоянной скоростью. Тогда скорость распространения возмущений можно вычислять по формуле
Г к 1 /р при р > Р к = к 1 /к 0 , k 0 при ρ<ρ k .
(9)
Учитывая ограничение на максимальную скорость потока ( v < v max ), можно получить следующую зависимость для максимальной безопасной, для данной плотности ρ , скорости потока:
V(р) = min{vmax; кi(1 — 1) при р ^ рл,
ρ
(к о — к 1) — к о ln — при р<рк}. (12)
ρ k
График этой зависимости представлен на рис. 3.
График этой зависимости представлен на рис. 2.
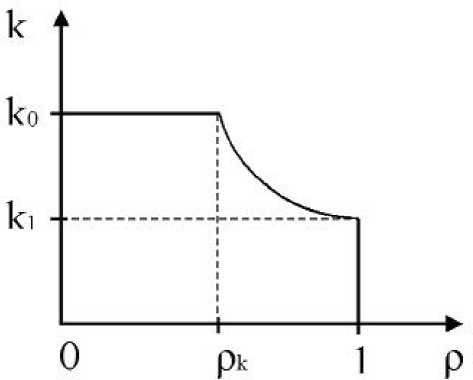
Рис. 2. Зависимость скорости распространения возмущений от плотности потока
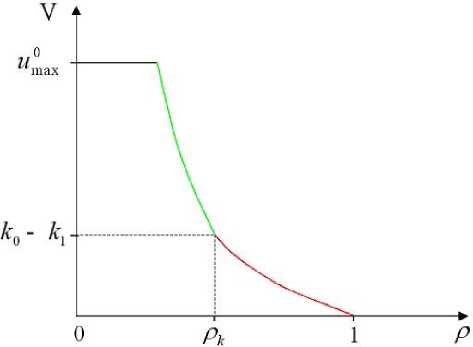
Рис. 3. Максимально безопасная для данной плотности ρ скорость потока
Если в (3) принять о = 1 ,т = го , то при р ^ р к получим систему двух квазилинейных уравнений в частных производных:
др+v др+р dv = о,
∂t ∂x ρ 2 ∂x ,
∂v ∂v k 1 ∂ρ
dt + v Эх + р3 Эх = 0 ■
(10)
Ее характеристики в плоскости ( x ; t )- C + , C и условия вдоль них следующие:
с + : dx = v + р ,р^ = — p йр; C’ : dt = v P ^dv = P dР.
(11)
Для волн, распространяющихся влево, навстречу потоку с постоянными параметрами, имеет место интеграл Римана, полученный из соотношения на характеристике C~ (11):
Экспериментальное определение значения скорости распространения возмущений k 1 при начале движения потока. Эксперимент проводился для однополосного потока машин, без учета возможности перестроений в очереди перед светофором. В начальный момент времени, когда включен красный сигнал светофора, автомобили располагаются вплотную, «бампер в бампер». Тогда, согласно представленной модели, плотность потока р = 1 и к (1) = k j 1 = к 1 . Величина скорости k 1 определялась экспериментально следующим образом: осуществлялись прямые наблюдения и замеры времени между тем, как загорался зеленый сигнал, и моментами, когда начинали движение автомобили, удаленные на расстояние 1 1 = 48 , 5 ми 1 2 = 73 , 5 м от светофора. Фиксировалось соответственно время начала движения в точках l 1 и l 2 , что позволяло определить среднюю скорость распространения сигнала:
v — v о = к 1
(р a
k 1
1 2 - 1 1
, эксп —
.
t 2 - t 1
Результаты произведенных замеров сведены в табл. 1. В расчетах использовалось среднее арифметическое значение k 1 =4 , 1 м / с ≈ 15 км / ч.
Таблица 1
Результаты эксперимента по определению скорости распространения возмущений k 1
|
№ |
l 1 ,м |
l 2 ,м |
t 1 ,с |
t 2 ,с |
k 1 , эксп . , м/с |
|
1 |
48 , 5 |
73 , 5 |
14 , 46 |
19 |
5 , 5066 |
|
2 |
48 , 5 |
73 , 5 |
10 , 99 |
17 |
4 , 1597 |
|
3 |
48 , 5 |
73 , 5 |
12 , 58 |
18 |
4 , 6125 |
|
4 |
48 , 5 |
73 , 5 |
9 , 33 |
17 |
3 , 2595 |
|
5 |
48 , 5 |
73 , 5 |
12 , 53 |
18 |
4 , 5704 |
|
6 |
48 , 5 |
73 , 5 |
14 , 17 |
21 |
3 , 6603 |
|
7 |
48 , 5 |
73 , 5 |
11 , 52 |
19 |
3 , 3422 |
|
8 |
48 , 5 |
73 , 5 |
12 , 5 |
20 |
3 , 3333 |
II.2. Модель перестроений транспортных средств между полосами
Рассмотрим однонаправленный поток машин по двухполосной дороге при подъезде к светофору. Введем эйлерову систему координат x вдоль автомагистрали в направлении движения потока и время t . Средняя плотность потока ρ ( x,t ) вычисляется по формуле (1).
Движение транспортного потока регулируется светофором. L 1 — координата места расположения светофора (рис. 4). Основные параметры работы светофора — длительность сигналов: зеленого t 1 и красного t 2 . Во время работы зеленого сигнала разрешен проезд по обеим полосам, во время работы красного сигнала проезд по обеим полосам запрещен.
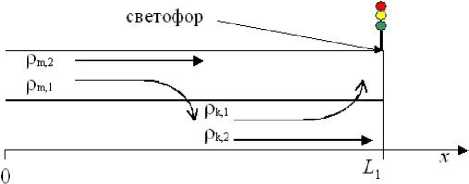
Рис. 4. Схема движения двухполосного транспортного потока с учетом перестроений между соседними полосами
Пусть в начальный момент времени транспортные средства, которые должны проехать светофор в левом и правом рядах, равномерно распределены между полосами движения. Тогда плотность потока по каждой полосе ρ k ( x ) = ρ 1 ,k + ρ 2 ,k , где x — координата вдоль полосы по направлению движения, ρ 1 ,k — плотность транспортных средств, которые не обязаны сворачивать на соседнюю полосу и ρ 2 ,k — плотность тех транспортных средств, что должны перестроится в другой ряд до светофора (рис. 4).
Тогда уравнения баланса транспортных средств на двух соседних полосах с индексами k,m запишутся в следующем виде:
|
∂ρ 1 ,k ∂t |
: ∂ + ∂x ( ρ 1 ,k v k )= |
ω km ( ρ 2 ,m ,ρ k ) , |
|
∂ρ 2 ,k ∂t |
∂ + ∂x ( ρ 2 ,k v k )= |
-ω mk ( ρ 2 ,k ,ρ m ); |
|
∂ρ 1 ,m ∂t |
∂ + ∂x ( ρ 1 ,m v m ) |
ω mk ( ρ 2 ,k ,ρ m ) , |
|
∂ρ 2 ,m ∂t |
∂ + ∂x ( ρ 2 ,m v m ) = |
-ω km ( ρ 2 ,m ,ρ k ) |
Здесь ω mk — поток транспорта с полосы k на полосу m . Он рассчитывается следующим образом: рассматривается условие перестроения по близости светофора; если
vkτtr +Δtr >L1 - x, (13)
то необходимо перестраиваться. Рассматривается условие по плотности до светофора (если первое условие не выполнено); если
ρk(L1 >x1 >x) > ρtr, (14)
то производится перестроение. В случае выполнения условия перестроения рассчитывается ω mk :
(ρ2,k (1 - ρm))δtr ωmk = ,
τ tr
τ tr — характерное время перестроения, Δ tr —дополнительная дистанция, ρ tr – критическая плотность на полосе, на которую должно быть выполнено перестроение, параметр δ tr отвечает за интенсивность потока, L 1 — координата светофора.
Уравнения изменения скорости для транспортных средств, движущихся по соседним полосам, запишутся в следующем виде:
dvk = - k2 ∂(ρ1,k + ρ2,k)
dt ρ1,k + ρ2,k ∂x ;
dvm = - k2 ∂(ρ1,m + ρ2,m)
dt ρ1,m + ρ2,m ∂x .
Предложенная модель движения двухполосного транспортного потока с учетом межрядовых перестроений при подъезде к светофору учитывает как случай свободного движения потока транспорта, так и ситуацию, когда возникает подвижная пробка.
-
III. Двухполосный транспортный поток
-
III.1. Математическая модель двухполосного транспортного потока
-
Рассмотрим однонаправленный поток машин по двухполосной дороге. Введем эйлерову систему координат x вдоль автомагистрали в направлении движения потока и время t . Средняя плотность потока ρ ( x,t ) вычисляется по формуле (1). Для описания динамики автотранспортного потока получается система двух квазилинейных уравнений в частных производных в дивергентной форме (4).
Воспользуемся моделью, предложенной в разделе II.1, то есть будем считать, что параметр k зависит от ρ и эта зависимость выражается формулой (8). Тогда система (4) примет вид (10). В этом случае максимально безопасная скорость движения транспортного потока для данной плотности V ( р ) вычисляется по формуле (9).
В качестве начальных условий примем, что на участке длиной x о , считая от входа x = 0, магистраль занята потоком машин плотности ρ 0 , движущихся с максимально безопасной для данной плотности скоростью V ( р 0 ), а при x 0 < x < L 1 магистраль свободна от машин ( р = 0 ,v = 0). Плотности транспортных средств на полосах в начальный момент времени вычисляются по следующим формулам:
0 p 0 p
р 1 >* = к1 “ 100 7р0, р2>* = 100р0’
0 p 0 p
-
р 1 ,т 100 Р 0 , Р 2 ,т 1 100 Р 0 ,
где p — процент транспортных средств, которые должны оказаться на правой полосе k до светофора (рис. 4).
В качестве граничных условий на концах рассматриваемого участка магистрали 0 ^ x ^ L выберем следующие: на входе потока при x = 0 возможны два варианта граничного условия.
-
1. В условиях отсутствия «пробки» задается плотность потока и скорость, равная максимально безопасной для данной плотности:
На основе описанной выше модели двухполосного потока проведено численное моделирование Т-образного перекрестка, образованного примыканием второстепенной двухполосной дороги к основной также двухполосной трассе. Движение на этом перекрестке регулируется светофором с тремя фазами работы. В ходе соответствующей фазы движение на перекрестке осуществляется так, как показано на рис. 5, 6, 7. На рис. 5 видно, что с второстепенной дороги правый поворот осуществим только из правого ряда, а левый — только из левого. На рис. 6 показано, что при движении по основной дороге слева направо правый ряд предназначен для поворота направо, а левый — для движения прямо. При движении справа налево левый поворот осуществляется из левого ряда, а движение прямо — из правого ряда.
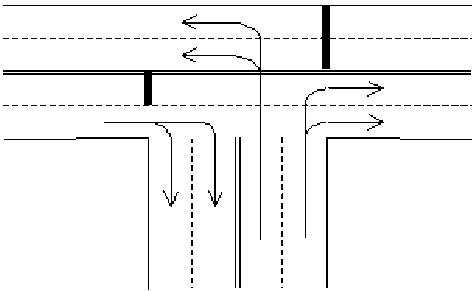
Рис. 5. Схема движения автотранспорта по Т-образному перекрестку в ходе первой фазы работы светофора
Р (0 ,t )= ро; v (0 ,t ) = V (ро).
-
1. В условиях подвижной или неподвижной «пробки», примыкающей к входному участку дороги x = 0, ставится условие равенства нулю градиента плотности, а скорость равна максимально безопасной для данной плотности:
∂ρ ∂x
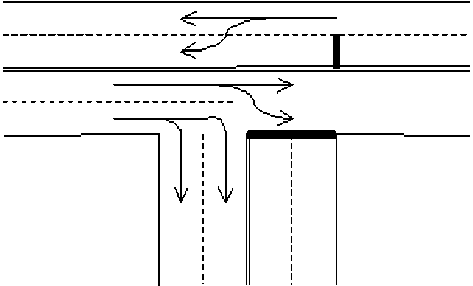
Рис. 6. Схема движения автотранспорта по Т-образному перекрестку в ходе второй фазы работы светофора
= 0; v (0 ,t ) = V (р).
=0
Наличие или отсутствие «подвижной пробки», примыкающей к левой границе расчетной области x = 0, определяется после расчета очередного шага по времени по следующему критерию. Если
∂ρ ∂x
> 0
x =0
и ρ>ρ0,
то имеется «подвижная пробка».
На выходе потока при x = L ставится условие «свободного выхода»:
др = 0; ∂x
5v = 0. ∂x
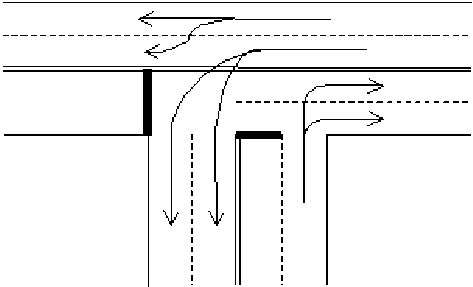
Рис. 7. Схема движения автотранспорта по Т-образному перекрестку в ходе третьей фазы работы светофора
III.2. Модель Т-образного перекрестка
В начальный момент времени автомобили, которые собираются поворачивать или продолжать движение прямо, равномерно рассредоточены по обоим рядам. По мере приближения к светофору автомобили начинают перестраиваться в нужный ряд, если выполнено одно из условий (13) или (14).
При расчетах использованы следующие параметры, общие для трех ветвей перекрестка:
-
L 1 = 1000 м — длина участка дороги до перекрестка;
-
x 0 =25м — длина участка, занятого движущимся транспортом в начальный момент времени t =0;
-
v m 0 ax =18 м / с — максимальная скорость движения на основном участке дороги;
-
v p =3 м / с — максимальная скорость автомобилей, поворачивающих в зоне перекрестка;
-
k 0 =7 , 9 м / с, k 1 =4 , 1 м / с — коэффициенты в выражении (2.2.4) для скорости распространения возмущений в потоке автотранспорта;
-
a + =1 , 5 м / с 2 — максимальное ускорение потока; a - = 5 м / с 2 — максимальное (экстренное) ускорение торможения потока;
-
a r =1 , 5 м / с 2 — стандартное ускорение торможения;
Δ=50м — расстояние принятия решения;
-
σ =0 , 5 — «вес» локальной ситуации;
-
τ + =3 , 3 с, τ - = ∞ — время задержки подстройки под безопасную скорость движения в выражении (2.1.3);
-
ρ tr =0 , 8 — критическая плотность на полосе, на которую должно быть выполнено перестроение;
-
τ tr =5 с — характерное время перестроения;
Δ tr =20м — дополнительная дистанция; δ tr = 0 , 01 в выражении (2.5.3); t 1 =60 c , t 2 =45 c , t 3 =5 с — длительности фаз работы светофора;
-
ρ 1 0 = 0 , 07, ρ 2 0 = 0 , 08, ρ 3 0 = 0 , 11 — плотности потока автотранспорта на входе в расчетную область при x =0для левой, правой и нижней частей перекрестка соответственно;
p 1 0 = 0 , 26, p 2 0 = 0 , 65, p 3 0 = 0 , 53 — доля транспортных средств, которые должны пересечь перекресток в правом ряду для левой, правой и нижней частей перекрестка соответственно.
На рис. 8 представлены результаты численного моделирования движения потока транспорта через Т-образный перекресток, регулируемый светофором. Здесь изображена плотность потоков транспорта в районе Т-образного перекрестка в моменты времени, обозначенные на рисунке. Шкала соответствия цвета значению плотности транспортного потока приведена в правом углу рисунка. В левом углу изображен график зависимости плотности потока от координаты расчетной области в левом ряду левой части перекрестка при движении слева направо, ось направлена по ходу движения транспортного потока. Момент времени t = 412 с соответствует первой фазе работы светофора, во время которой для левого ряда левой вет- ви перекрестка работает запрещающий сигнал. На графике видно, что в ходе работы запрещающего сигнала начинает образовываться второй участок повышенной плотности. Момент времени t = 465 с соответствует второй фазе работы светофора, в ходе которой включен сигнал, разрешающий проезд перекрестка по рассматриваемому участку магистрали. На графике изображено, что к этому моменту два участка повышенной плотности объединились в один затор, распространяющийся навстречу потоку. Момент времени t = 482 с соответствует третьей фазе работы светофора, в ходе которой проезд перекрестка по рассматриваемой полосе запрещен. График показывает, что у перекрестка вновь начинает образовываться очередь из автомобилей. Поскольку предыдущий участок повышенной плотности за время работы разрешающего сигнала не успел миновать перекресток, то с течением времени затор, образующийся перед светофором, растет. Следовательно, для данного режима работы светофора ρ10 = 0,07 превышает ρ∗0 , максимальную плотность входящего потока, не приводящую к затору.
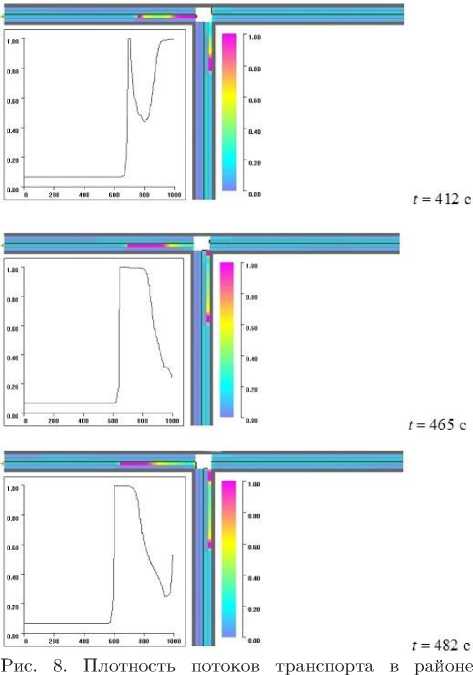
Т-образного перекрестка в моменты времени, обозна- ченные на рисунке
-
III.3. Влияние перестроений транспортных средств из ряда в ряд на пропускную способность участка магистрали
Построенная модель движения транспортного потока через Т-образный перекресток использована для изучения влияния межрядовых перестроений на пропускную способность магистрали. Для этого нижняя ветвь перекрестка рассматривалась изолированно от остальной части, а максимальная скорость поворачивающих транспортных средств принималась равной максимально разрешенной скорости на данном участке магистрали v p = v m0 ax .
Численное решение поставленной задачи осуществлялось методом TVD со вторым порядком точности [21]. Число узлов расчетной сетки N = 200.
При расчетах использованы следующие параметры:
-
L 1 = 1000 м — длина расчетной области;
-
x 0 =25м — длина участка, занятого движущимся транспортом в начальный момент времени t =0;
-
ρ 0 = 0 . 04 div 0 . 2 — плотность потока автотранспорта на входе в расчетную область при x =0;
-
v m 0 ax =18 м / с — максимальная скорость движения на рассматриваемом участке дороги;
k 0 =7 , 9 м / с, k 1 =4 , 1 м / с — коэффициенты в формуле (9) для скорости распространения возмущений в потоке автотранспорта;
-
a + =1 , 5 м / с 2 — максимальное ускорение потока; a - = 5 м / с 2 — максимальное (экстренное) ускорение торможения потока;
-
a r =1 , 5 м / с 2 — стандартное ускорение торможения;
Δ=50м — расстояние принятия решения;
-
σ =0 , 5 — «вес» локальной ситуации;
-
τ + =3 , 3 с, τ - = ∞ — время задержки подстройки под безопасную скорость движения в выражении (3);
-
t g = 40 div 350 с, t r =50с — длительности разрешающего и запрещающего сигналов светофора;
-
ρ tr =0 , 8 — критическая плотность на полосе, на которую должно быть выполнено перестроение;
-
τ tr =5 с — характерное время перестроения;
Δ tr =20м — дополнительная дистанция; δ tr = 0 , 01 в выражении (15).
В расчетах варьировалась плотность входящего потока ρ 0 (а значит, и его скорость) и длительность работы зеленого сигнала светофора t g .
Результаты расчетов представлены на рис. 9, 10, 11, 12, 13, 14, 15 и в табл. 2.
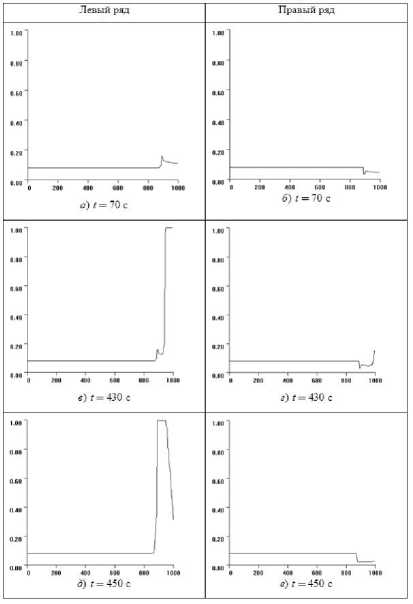
Рис. 9. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени для случая отсутствия подвижной пробки
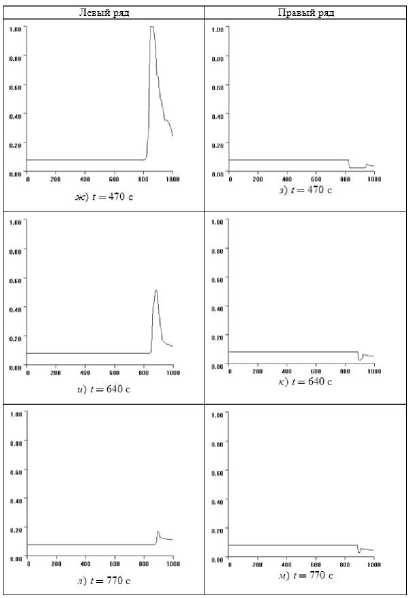
Рис. 10. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени для случая отсутствия подвижной пробки
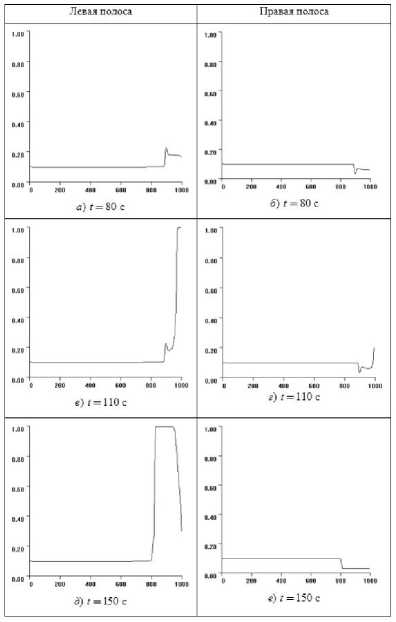
Рис. 11. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени для случая возникновения подвижной пробки

Рис. 13. Шкала соответствия цвета значению плотно- сти транспортного потока

Рис. 14. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени для случая отсутствия подвижной пробки. Движение транспортного потока происходит слева направо
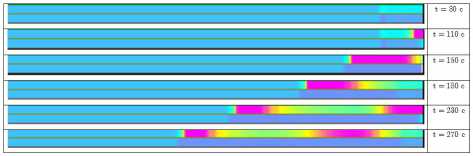
Рис. 15. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени в случае возникновения подвижной пробки. Движение транспортного потока происходит слева направо
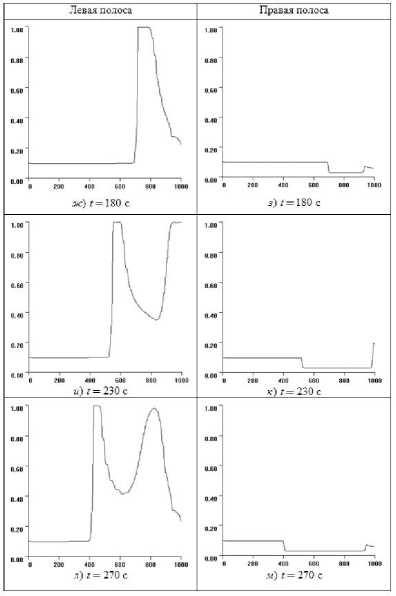
Рис. 12. Распределения плотностей ρ m и ρ k в левой и правой полосах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени для случая возникновения подвижной пробки
На рис. 9, 10 и 14 даны распределения плотностей ρm и ρk в левом и правом рядах транспортного потока в зависимости от координаты расчетной области x в различные моменты времени, указанные на рисунке. При этом длительность работы зеленого сигнала светофора tg = 350 с, p = 0,3, а начальная плотность транспортного потока равна ρ0 = 0,08. В начальный момент времени работает красный сигнал светофора и до окончания его работы остается 40 с. При таких начальных условиях поток транспорта движется без образования «подвижной пробки». Время на рис. 9, 10 и 14 соответствует следующим моментам цикла работы светофора: t =70с — зеленый период первого цикла; t = 430 с — красный период второго цикла; t = 450--770 с — 4 последовательных момента зеленого периода второго цикла. Как видно из этих графиков, при t =70с в левом ряду появляется участок повышенной плотности, а в правом пониженной, вызванные перестроениями из ряда в ряд, после включения красного сигнала плотность в обоих рядах повышается. В левом ряду плотность повышается до своего максимального значения и образуется неподвижная пробка, но за время работы зеленого сигнала зависимость плотности от координаты x возвращается к своему первоначальному виду, что видно на рис. 12л, м. В этом случае «подвижная пробка» с течением времени не образуется. Возвращение профиля плотности к своему первоначальному виду служит критерием свободного движения потока без образования «подвижной пробки».
На рис. 11, 12, 15 приведены данные для длительности работы зеленого сигнала светофора t g = 50 с, p = 0 , 3 и начальной плотности р о = 0 , 1. В начальный момент времени работает красный сигнал светофора и до окончания его работы остается 40 с. Время на рис. 11, 12, 15 соответствует следующим моментам цикла работы светофора: t = 80 с — зеленый период первого цикла; t =110 с — красный период второго цикла; t = 150 си t = 180 с — зеленый период второго цикла; t = 230 с — красный период третьего цикла; t = 270 с — зеленый период третьего цикла. На рис. 12ж видно, что за время работы зеленого сигнала профиль плотности не успевает вернуться к своему первоначальному виду, и с течением времени в левом ряду образуются участки повышенной плотности, где скорость движения заметно уменьшается. Другими словами, возникает затор, перемещающийся против потока. При этом в правом ряду образуется зона пониженной плотности (рис. 12е, з, к, м). Снижение плотности обусловлено тем, что в левом ряду, в который необходимо выполнить перестроение, плотность превысила критическое значение p tr = 0 , 8 и автомобили начинают перестраиваться в левый ряд задолго до светофора.
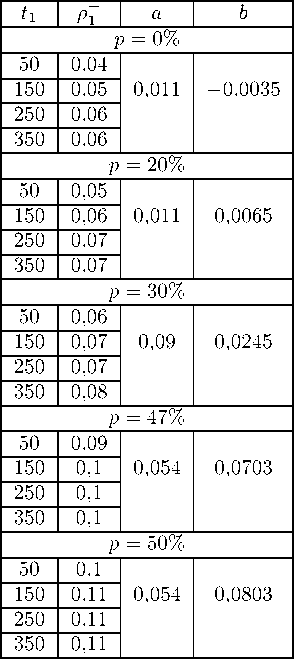
Результаты исследования зависимости величины предельной начальной плотности потока р00, при которой не образуется «подвижная пробка», от длительности зеленого сигнала светофора tg и p приведены в табл. 2. Остальные исходные параметры фиксированы. Зависимость р00 от tg хорошо описывается формулой р0 = a ln( tg)+ b, (16) где a, b — параметры, зависящие от многих факторов, включая длительность красного сигнала tr. Для рассмотренных исходных данных значения a, b также приведены в табл. 2, соответствующие графики изображены на рис. 16.
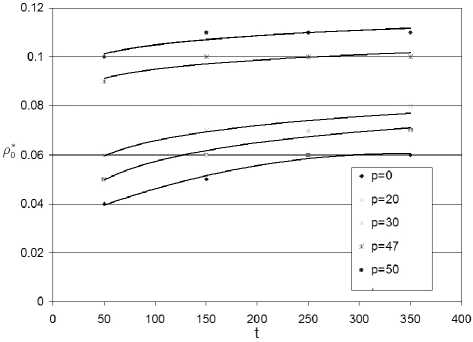
Рис. 16. Зависимость величины предельной начальной плотности потока ρ ∗ 0 , при которой не образуется «подвижная пробка», от длительности зеленого сигнала светофора t g и p
Проведенные расчеты позволяют сделать вывод, что предельная начальная плотность потока не зависит от процента машин, которые должны проехать перекресток в левом ряду, что объясняется тем, что совокупное количество автомобилей, выполняющих перестроение, не зависит от этого процента. Однако в целом перестроения снижают пропускную способность магистрали в 2 раза по сравнению со случаем отсутствия перестроений.
Таблица 2
Зависимость величины предельной начальной плотности потока ρ∗ 0 , при которой не образуется «подвижная пробка», от длительности зеленого сигнала светофора tg и p , а также соответствующие значения коэффициентов a и b в формуле (16)
В результате численного решения рассмотренных выше задач получены следующие основные результаты:
-
• Для двухполосного транспортного потока построены зависимости предельной начальной плотности, не приводящей к затору, от длительности зеленого сигнала светофора и от процента автомобилей, меняющих полосу движения.
-
• Установлено, что при регулировании движения двухполосного потока транспорта све-
- тофором максимальная пропускная способность магистрали падает почти вдвое по сравнению со случаем отсутствия перестроений. В связи с этим на особо загруженных участках дорог целесообразно ограничить в целях повышения пропускной способности магистрали возможность перестроений.
Список литературы Математическое моделирование движения автотранспортных потоков методами механики сплошной среды. Двухполосный транспортный поток: модель Т-образного перекрестка, исследование влияния перестроений транспортных средств на пропускную способность участка магистрали
- Lighthill M.G., Whitham G. B. On kinetic waves II. A theory of traffic flow on ling crowded roads//Proc. Roy. Soc. London. Ser. A. -1955. -V. 229, N. 1178. -P. 317-345.
- Richards P. L. Shock waves on the highway//Operations Research. -1956. -V. 4, N. 1. -P. 42-51.
- Уизем Д. Линейные и нелинейные волны. -М.: Мир, 1977.
- Гасников А.В., Кленов С.Л., Нурмин-скийЕ.А., Холодов Я.А., Шамрай Н.Б. Введение в математическое моделирование транспортных потоков/под ред. А.В. Гасникова, с приложения-ми М.Л. Бланка, Е.В. Гасниковой, А.А. Замятина, В.А. Малышева, А.В. Колесникова, А.М. Райго-родского. -М.: МФТИ, 2010.
- Bando M., Hasebe K., Nakanish K., Nakayama A. Delay of Vehicle Motion in Traffic Dynamics//Japan Journal of Industrial and Applied Mathematics. -2000. -V. 17. -P. 275-290.
- Algers S., Bernauer E., Boero M., Breheret L., Di Taranto C., Dougherty M., Fox K., Gabard G.-F. Review of Micro-Simulation Models. Review Report of the SMARTEST project. 1997 (http://www.its.le eds.ac.uk/projects/smartest/deliv3.html).
- Карамзин Ю.Н., Трапезникова М.А., Чет-верушкин Б.Н., Чурбанова Н.Г. Двумерная модель автомобильных потоков//Математическое моделирование. -2006. -Т. 18, № 6. -С. 85-95.
- Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Юмашев М.В. Математическое моделирование автотранспортных потоков. -М.: Механико-математический ф-т МГУ им. М.В. Ломоносова, 1999.
- Prigogine I., Resibois P. On a Generalized Boltzmann-like Approach for Traffic Flow//Bull. Cl. Sci., Acad. Roy. Belg. -1962. -V. 48, N. 9. -P. 805-814.
- Greenberg H. An Analysis of Traffic Flow//Operations Research. -1959. -V. 7. -P. 79-85.
- Payne H.J. Models of Freeway Traffic and Control: Berkey G.A. Matematical Models of Public Systems. -1971. -V. 1. -P. 51-61.
- Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Юмашев М.В. Математическое моделирование автомобильных потоков на магистра-лях//Вестн. МГУ. Сер. 1. Матем. механ. -2000. -№ 4. -С. 39-44.
- Киселев А.Б., Никитин В.Ф., Смирнов Н.Н., Юмашев М.В. Неустановившиеся движения автотранспорта на кольцевой магистрали//Прикл. матем. и механ. (ПММ). -2000. -Т. 64, в. 4. -С. 671-678.
- Kiselev A.B., Smirnov N.N., Nikitin V.F., Yumashev M.V. Mathematical modelling of traffic flow//Proc. of 9th IFAC Symposium in Transportation Systems 2000 (June 13-15, 2000, Braunschweig, Germany). -Elsevier Science Ltd., Oxford, 2000. -P. 223-232.
- Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Асташова Е.Г., Асташов Н.А. Математическое моделирование динамики автотранспортных потоков и вызываемого ими загрязнения атмосферного воздуха в автомобильных тоннелях//Наукоемкие технологии. -2003. -Т. 4, № 9. -С. 29-43.
- Киселев А.Б., Кокорева А.В., Никитин В.Ф., Смирнов Н.Н. Математическое моделирование автотранспортных потоков на регулируемых дорогах//Прикл. матем. и механ. (ПММ). -2004. -Т. 68, в. 6. -С. 1047-1054.
- Киселев А.Б., Кокорева А.В., Никитин В.Ф., Смирнов Н.Н. Математическое моделирование движения двухполосного автотранспортного потока, регулируемого светофором//Вестн. МГУ. Сер. 1. Матем. Механ. -2006. -№ 4. -С. 35-40.
- Kiselev A.B., Kokoreva A.V., Nikitin V.F., Smirnov N.N. Computational modelling of traffic flows//European Conf. on Computational Fluid Dynamics (Egmond aan Zee, The Netherlands, 5-8 Sept. 2006). -Proc. on CD-ROM. -10 p.
- Киселев А.Б., Кокорева А.В., Никитин В.Ф., Смирнов Н.Н. Математическое моделирование движения автотранспортных потоков методами механики сплошной среды. Исследование влияния искусственных дорожных неровностей на пропускную способность участка дороги//Современные проблемы математики и механики. Т. I. Прикладные исследования/под редакцией В.В. Александрова и В.Б. Кудрявцева. -М.: Изд-во МГУ, 2009. -С. 311-322.
- Greenberg H. An analysis of traffic flow//Operations Research. -1959. -V. 7. -P. 79-85.
- Оран Э., Борис Дж. Численное моделирование реагирующих потоков. -М.: Мир, 1990.
