Математическое моделирование мультиинертного колебательного механизма

Бесплатный доступ
Отмечено, что свободные гармонические колебания классического маятника обусловлены взаимным преобразованием кинетической энергии груза в потенциальную энергию пружины. Разработаны осцилляторы с другим характером энергообмена, например преобразованием кинетической энергии груза в энергию магнитного поля соленоида или энергию электрического поля конденсатора. Все эти колебательные системы и подобные им явились предпосылкой создания биинертного осциллятора, в котором ускорение одного груза происходит за счет торможения другого, т.е. происходит обмен только кинетическими энергиями. Целью работы является математическое моделирование мультиинертного колебательного механизма. Основными методами исследования в рамках настоящей работы являются методы математического моделирования и анализа. Использованные методы позволяют получить достоверное описание исследуемых объектов. В предложенном мультиинертном осцилляторе инертные тела массой m каждое осуществляют гармонические колебания, обусловленные взаимным обменом кинетической энергией. Потенциальная энергия пружин для этого не требуется. Колебания тел являются свободными. Особенностью мультиинертного осциллятора является то, что частота его свободных колебаний не фиксирована и определяется преимущественно начальными условиями. Эта особенность может оказаться весьма полезной для технических приложений, например, для самонейтрализации механической реактивной (инерционной) мощности. Образованный инертными телами n-угольник осуществляет сложное движение - орбитальное вращение вокруг центра координат и спиновое вращение вокруг своей оси, проходящей через центр n-угольника. При этом каждый груз совершает линейные гармонические колебания вдоль своей направляющей. При расположении направляющих грузов не в виде звезды, а параллельно друг другу углы между соответствующими кривошипами необходимо составят 360/n градусов.
Осциллятор, инертный, гармонический, реактивность, пространственный сдвиг, фазовый сдвиг, кинетическая энергия
Короткий адрес: https://sciup.org/147233468
IDR: 147233468 | УДК: 534.014 | DOI: 10.14529/engin200103
Mathematical modelingof a multi-inert oscillatory mechanism
It is noted that the free harmonic vibrations of a classical pendulum are due to the mutual conversion of the kinetic energy of the load into the potential energy of the spring. Oscillators with a different nature of energy exchange have been developed, for example, by converting the kinetic energy of a load into the energy of a magnetic field of a solenoid or the energy of anelectric field of a capacitor. All these oscillatory systems and the like were a prerequisite for the creation of a biinert oscillator, in which the acceleration of one load occurs due to the braking of another, i.e. only kinetic energies are exchanged. The aim of the work is mathematical modeling of a multi-inert oscillatory mechanism. The main research methods in the framework of this work are methods of mathematical modeling and analysis. The methods used make it possible to obtain a reliable description of the studied objects. In the proposed multi-inert oscillator, inert bodies of mass m each carry out harmonic oscillations due to the mutual exchange of kinetic energy. The potential energy of the springs is not required for this. Body vibrations are free. A feature of a multi-inert oscillator is that the frequency of its free oscillations is not fixed and is determined mainly by the initial conditions. This feature can be very useful for technical applications, for example, for self-neutralization of mechanical reactive (inertial) power. n-gon, formed by inert bodies, carries out complex motion - orbital rotation around the center of coordinates and spin rotation around its axis passing through the center of the n-gon. Moreover, each load performs linear harmonic oscillations along its guide. With the arrangement of the guiding weights not in the form of a star, but in parallel to each other, the angles between the corresponding cranks must be 360/n degrees.
Текст научной статьи Математическое моделирование мультиинертного колебательного механизма
Свободные гармонические колебания классического маятника обусловлены взаимным преобразованием кинетической энергии груза в потенциальную энергию пружины [1, 2]. Разработаны осцилляторы с другим характером энергообмена, например, преобразованием кинетической энергии груза в энергию магнитного поля соленоида или энергию электрического поля конденсатора. Все эти колебательные системы и подобные им [3–20] явились предпосылкой создания биинертного осциллятора, в котором ускорение одного груза происходит за счет торможения другого, т. е. происходит обмен только кинетическими энергиями.
Целью работы является математическое моделирование мультиинертного колебательного механизма.
Основными методами исследования в рамках настоящей работы являются методы математического моделирования и анализа. Использованные методы позволяют получить достоверное описание исследуемых объектов.
Синтез колебательного механизма
Пусть в плоскости Z имеются не две, а n координатных осей 0 x 1,0 x 2,...,0 xn , образующих центрально симметричную звезду с центром в точке 0 . Угол между осями составляет π/ n . Из начала координат 0 отложен вектор R . Направление вектора произвольное. R ⊂ Z .
Теорема 1
-
1. Отрезки, соединяющие координаты x 1, x 2,..., xn вектора R в системе координат 0 x 1,0 x 2,...,0 xn , образуют правильный n -угольник.
-
2. Размер n -угольника не зависит от ориентации вектора R .
-
3. Середина вектора R совмещена с центром n -угольника.
Доказательство . Вектор R имеет координаты:
X i = R cos ф ,
I П | x2 = R cos I--ф I, к n J d I2n 1 x3 = RcosI--ф I, к n J xi = R cos
( i - 1) n
n
xn = R cos
( n - 1) n
n
В соответствии с теоремой косинусов
( XiXi + 1 ) = R 2 I cos 2
( i - 1) я
--ф
n
, 2i i я 1 o
+ cos I--ф I- 2 cos к n J
( i - 1) я
--ф
n
I i я 1 я I cos I--ф I cos — f = к n J n
П i i П i П • i .
cos—I cos—cos ф + sin—sin ф I + n к n n J
I 21 i П П 1 . I i П . • i П • I
= R < cos I--ф—I+I cos — cos ф + sin—sin ф| - 2
[к n n J к n n J
. я i . i я i я . 1 i i я . i я . 1 я I
+ sin—I sin—cos ф- cos—sin ф I I cos—cos ф + sin—sin ф I cos— f = n к n n JJк n n J n
I 2 я 2 i я 2 2я- 2 i я - 2 -2я- 2 i я 2 -2я 2 i я - 2
= R I cos —cos —cos ф + cos —sin —sin ф + sin —sin —cos ф + sin —cos —sin ф + к n n n n n n n n
-
2 я iя . iя . _ я iя 2 ■ я ■ iя я 2 iя.
+2cos —cos—cosфsin—sinф + 2cos—cos—cos фsin—sin--2cos—cos —cosфsin—sinф + nn n nn nn n n n я . 2 iя ■ ■ я я ■ iя ■ 2 ■ я iя -2 я ■ iя
+2cos—sin —sinфsin—cosф-2cos—sin—sin фsin—cos--2sin —sin—cosфcos—sinф + nn n nn nn nn n
2 iя 2 . ■ 2 iя ■ 2 . iя ■ iя ■ 2 я 2 iя2
+ cos —cos ф + sin —sin ф + 2cos — cos ф sin—sin ф- 2cos —cos —cos ф- nnnnnn
_ 2 я ■ iя ■ iя _ . я . iя 2 iя я . О ■ я 2 iя■
- 2cos —sin—sin ф cos — cos ф- 2sin—sin—cos ф cos—cos— + 2sin—cos —sin ф cos ф cos— nn n nn nn n n n
_ 2 я i я . i я . _ 2 я . 2 i я .2
- 2cos —cos — cos ф sin—sin ф- 2cos —sin —sin ф- nn n n n
. я . 2 i n • я . • я i n . 2 i n я 1
-2sin—sin —cosфsinфcos— + 2sin—cos—sin фsin—cos— I = n n n n n n n J
Г 2 I ■ 2 я . 2 i n 2 я 2 i n 2 i n 1
= R I cos ф! sin —sin--cos —cos —+ cos —I +
L к n n n n n J
I ■ 2 я 2 i n 2 я ■ 2 i n . ■ 2 i n I
+ sin фI sin —cos--cos —sin — + sin — I = к n n n n n J
— 2 Г 2 I ■ 2 я . 2 i я . 2 я 2 i П 1 . 2 I ■ 2 П 2 i П . 2 П . 2 i П 1
= R I cos фI sin —sin — + sin —cos —I + sin фI sin —cos — + sin —sin —I =
L к n n n n J к n n n n J
= R 2
2 . 2 nI ■ 2 iП . 2 iП I . ■ 2 ■ 2 nI 2 iП . ■ 2 iП I cos фsin —I sin — + cos — I+ sin фsin —I cos — + sin n к n n J n к nn
Г>21 2 я . 2 • 2я I 2 я/ _2 . 2 \ r>22
= R I cos ф sin — + sin ф sin — I = R sin —(cos ф + sin ф) = R sin —.
к n nJ n^' n
Расчет и конструирование
Из этого следует, что все стороны n -угольника одинаковы по длине. При этом их длина не является функцией ф , т. е. не зависит от ориентации вектора R .
Далее середина вектора R обозначается r . В соответствии с теоремой косинусов
7 X 2 Л 2Г ( i - 1 ) п 1 1 Г ( i - 1 ) п 1 1 Г ( i - 1 ) п 11 R R
(
xr
)
=
R
I L n J 4 L n J 2 L n JJ 4
Из этого следует, что все отрезки, связывающие точку r с вершинами n -угольника, имеют одинаковую длину. Это означает, что n -угольник является правильным и точка r совпадает с его центром.
Теорема доказана.
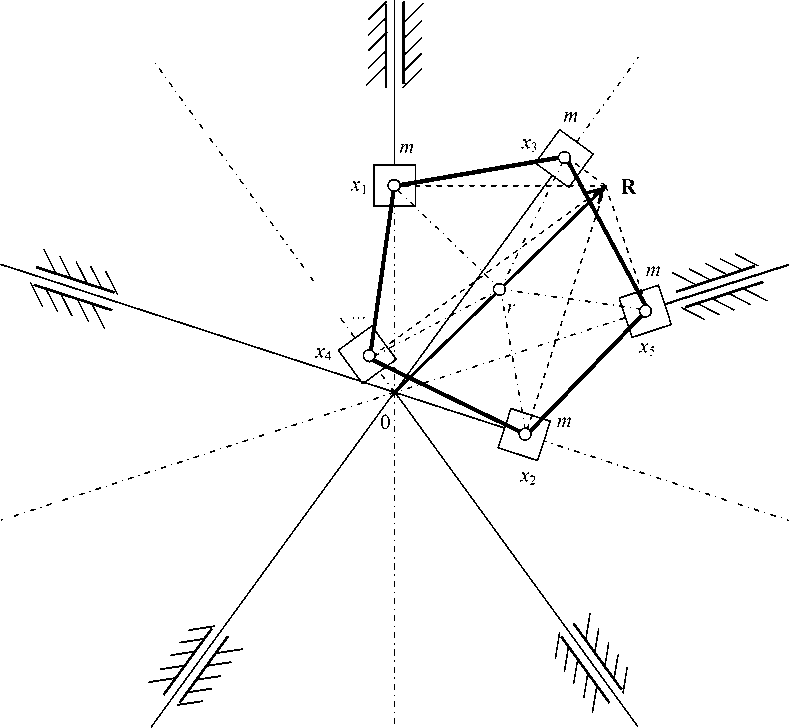
Теорема 1 позволяет определить конфигурацию мультиинертного осциллятора, упрощенная схема которого показана на рисунке.
m
Мультиинертный осциллятор
Для целей теоремы 1 вершины правильного многоугольника рассматривались в одной плоскости Z . Для инженерных целей траектории грузов не должны пересекаться, поэтому грузы и их направляющие расположены в параллельных плоскостях подобно цилиндрам, шатунам и кривошипам в кривошипно-шатунном механизме. Для обеспечения этого, например, стержень x 1 x 3 закреплен «сверху» (ближе) груза, находящегося в координате x 1 , а стержень x 1 x 4 – «снизу» (см. рисунок).
Анализ колебательного механизма
Внешние силы к системе не приложены. Скорости инертных тел массой m каждое определяются как производные их координат. В соответствии с (1), (2)
dx „ .d
—1 = - R sin ф— dt dt dx-) „ . In1
—2 = R sin | —ф I—, dt V n ) dt dx-, „ . ( 2n1
—3 = R sin I dt V n ) dt dx
—L = R sin dt
(i - 1)n
--ф
n
d ф dt ,
dx
—n = R sin dt
(n - 1)n ф
n
d ф dt .
Для того чтобы в системе происходили свободные гармонические колебания, необходимо, чтобы ее полная энергия оставалась постоянной. В данном случае полная энергия системы имеет вид:
•2 -2 ( П 1 . 2 ( i - 1) n • 2 ( n - 1) n || d ф |
sin ф + sin-- ф + ... + sin-- ф + ... + sin-- ф И — .
Vn L n J L n JJV dt)
Теорема 2
При n > 2 имеет место выражение:
n
Ё sin2
i = 1
( i - 1)n ,
---— ±ф
n
n
.
Доказательство
n

( i - 1) n n
±ф =

—cos
Ы^ 2 ф n
n
-
1 o ( i - 1)2n_ 1 . o . ( i - 1)2 n — cos 2 ф > cos -----— +—sin 2 ф > sin -----— .
-
2 i = 1 n 2 i = 1 n
Если вдоль координатных осей 0x1,0x2,...,0xn отложить единичные векторы, то их сумма вследствие центральной симметрии будет равна нулю. Следовательно, сумма проекций этих единичных векторов на любую из осей 0x1,0x2,...,0xn также будет нулевой. По этой причине по- следние две суммы тождественно равны нулю.
Теорема доказана.
Следствие . При n = 2 выражение (4) приобретает известный вид:
I п 1- 2sin ф + sin I 2 + ф I = sin ф + cos ф = 2 = 1.
Точно также доказывается
Теорема 3
При n > 2 имеет место выражение:
n
Ё cos 2
i = 1
( i - 1)п ,
---— ±ф
n
n
. 2
С учетом теоремы 2 (выражение (4)) полная (она же кинетическая) энергия (3) равна
Т 1 nd d ф1 2
T = —nmR I — I = const.
-
4 V dt )
Из последнего выражения следует
Расчет и конструирование
d ф
— = const.
dt ф = C1t + C2.
Начальные условия для фазы и угловой скорости:
ф(°) = Фо, d Ф/m
—(0) = ® 0 .
dt
Отсюда C 2 = Ф о , C 1 = to o .
Формулы для координат грузов (1)–(2) принимают вид: x1 = R cos (toot + ф0), x 2 = R cos I n-to01 -фо I, к n )
„ Г 2 n . )
x3 = R cos I--to01-ф0 I, к n )
x i = R cos
(i - 1)n
n
-to0 t -Ф0
xn = R cos
(n - 1)n
n
-to0 t -Ф0
Начальные условия для перемещения и линейной скорости: x 1(0) = x 10 , dx
— (0) = v w.
dt
Отсюда
x cos Ф0 = —
Фо = arccos — = arcsin. 1 - x 10
0 R R 2
- R to 0 sin( to 0 0 + Ф 0 ) = v w,
to0 =
v 10
V R 2 - x 2
Выводы
Инертные тела массой m каждое осуществляют гармонические колебания, обусловленные взаимным обменом кинетической энергией. Потенциальная энергия пружин для этого не требуется.
Колебания тел являются свободными.
Особенностью мультиинертного осциллятора является то, что частота его свободных колебаний (5) не фиксирована и определяется преимущественно начальными условиями. Эта особенность может оказаться весьма полезной для технических приложений, например, для самонейт-рализации механической реактивной (инерционной) мощности.
n -угольник x 1, x 2,..., xn осуществляет сложное движение – орбитальное вращение вокруг центра координат 0 и спиновое вращение вокруг своей оси, проходящей через центр r .
При этом каждый груз совершает линейные гармонические колебания вдоль своей направляющей. Его координата изменяется от + R до – R .
При расположении направляющих грузов не в виде звезды, а параллельно друг другу углы между соответствующими кривошипами необходимо составят 360/ n градусов.
Мультиинертный осциллятор имеет перспективу промышленного применения. Некоторые вибромашины, в частности сортировальные имеют более трех массивных подвижных рабочих органов. Построение их по схеме мультиинертного осциллятора позволит существенно сократить потребление энергии, которая в этом случае не будет расходоваться на сообщение массивным рабочим органам колебательных движений (около 90 % полной мощности), а будет направлена только на компенсацию трения и на совершение полезной работы.
Список литературы Математическое моделирование мультиинертного колебательного механизма
- Donmez, D. Variational Iteration Method for Transverse Vibrations of the Elastic, Tensioned Beam / D. Donmez, E. Koca // International Journal of Materials, Mechanics and Manufacturing. -2017. - Vol. 5. - No. 3. - Р. 187-190.
- Попов, И.П. Дифференциальные уравнения двух механических резонансов / И.П. Попов // Прикладная физика и математика. - 2019. - № 2. - С. 37-40. DOI: 10.25791/pfim.02.2019.599
- Platovskikh, M.J. Self-oscillations of machines and mechanisms / M.J. Platovskikh, M.M. Vetyu-kov. - St. Petersburg: University of Mines, 2017. - P. 87-103.
- A model of wall pressure correlation for prediction of turbulence induced vibration / S. Finnve-den, F. Birgersson, U. Ross, T. Kremer //Fluids and Structures. - 2005. - No. 20. - P. 1127-1143.
- Birgersson, F. A spectral super element for modelling ofplate vibration. Part 1: General theory / F. Birgersson, S. Finnveden, C.-M. Nilsson // Sound and Vibration. - 2005. - No. 287. - P. 297-314.
- Birgersson, F. A spectral super element for modelling of plate vibration. Part 2: Turbulence excitation /F. Birgersson, S. Finnveden //Sound and Vibration. - 2005. - No. 287. - P. 315-328.
- Hambric, S.A. Vibrations of plates with clamped and free edges excited by low-speed turbulent boundary layer flow / S.A. Hambric, Y.F. Hwang, W.K. Bonness // Fluid and Structures. - 2004. -No. 19. - P. 93-110.
- Newland, D.E. An Introduction to Random Vibration and Spectral Analysis / D.E. Newland. -New York: Longman. - 1984.
- A review of the Acoustic and Aerodynamic Loads and the Vibration Response of the Space Shuttle Orbiter Vehicle - STS-1 Dynamics Verification Assessment / D.C. Rennison, A.G. Piersol, J.F. Wilby, E.G. Wilby // BBN, Report 4438for NASA, Jet Propulsion Laboratory. - 1980.
- Кондаков, С.В. Обоснование параметров ударно-вибрационного механизма уплотнения бетонной смеси для бетоноукладчика на гусеничном ходу / С. В. Кондаков, Е.И. Кромский, М.А. Асфандияров // Всероссийская научно-практическая конференция. - Челябинск: ОУ ВО «ЮжноУральский институт управления и экономики», 2018. - С. 148-156.
- Iskakov, Z. The nonlinear vibrations of a vertical hard gyroscopic rotor with nonlinear characteristics / Z. Iskakov, K. Bissembayev //Mech. Sci. - 2019. - No. 10. - P. 529-544.
- Сандалов, В.М. Динамическая модель вентильно-индукторного вибропривода /В.М. Сандалов, Ю.С. Сергеев //Электротехника. - 2012. - № 8. - С. 24-27.
- Сергеев, Ю.С. Приводы вибрационных машин на базе вентильных индукторных двигателей: автореф. дис. ... канд. техн. наук /Ю.С. Сергеев. - Челябинск: Издат. центр ЮУрГУ, 2011. - 22 с.
- Zhang, Z. Design and Optimization of Comb Drive Accelerator for High Frequency Oscillation / Z. Zhang //Modern Mechanical Engineering. - 2018. - No. 8. - P. 1-10.
- Пат. 2533743 Российская Федерация, МПК7 В22А 9/04 В02С 18/00. Способ возбуждения колебаний / С.В. Сергеев, Б.А. Решетников, Е.Н. Гордеев, Ю.С. Сергеев, В.П. Гоголев, Р.Г. Закиров, А.А. Микрюков, А.В. Иршин. - № 2013121307/28; заявл. 07.05.13; опубл. 23.09.14, Бюл. № 32. - 12 с.
- Chen X. Numerical modeling and dynamic characteristics study of coupling vibration of multistage face gearsplanetary transmission /X. Chen, Q. Hu, Z. Xu, C. Zhu //Mech. Sci. - 2019. - No. 10. -P. 475-495.
- Сергеев, С.В. Вибрационные роторные приводы машин: моногр. / С.В. Сергеев, Б.А. Решетников, Р.Г. Закиров. - Челябинск: Изд-во ЮУрГУ, 2007. - С. 133.
- Сергеев, С.В. Исследование формы траектории движения рабочего органа роторных инерционных виброприводов / С.В. Сергеев, Б.А. Решетников, А.А. Микрюков // Наука ЮУрГУ. Материалы 67-й научной конференции. - Челябинск: Издат. центр ЮУрГУ, 2015. - С. 1261-1264.
- Ефимцов, Б.М. Колебания цилиндрической панели в поле турбулентных пульсаций давления /Б.М. Ефимцов //Акуст. журн. - 1986. - Т. 32, № 4. - С. 536-538.
- Ефимцов, Б.М. Экспериментальное исследование колебаний и акустического изучения пластин в поле турбулентных пульсаций давления при сверхзвуковых скоростях потока /Б.М. Ефимцов, Л.Я. Кудисова, А.А. Лебедев //Акуст. журн. - 1984. - Т. 30, № 5. - С. 714-715.
