Математическое моделирование устройства для глубокого уплотнения грунтов

Автор: Кондаков Сергей Владимирович, Асфандияров Марат Андреевич, Гундарев Кирилл Александрович
Рубрика: Численные методы моделирования
Статья в выпуске: 2 т.21, 2021 года.
Бесплатный доступ
В данной статье рассмотрена принципиальная схема устройства для глубокого уплотнения грунтов с использованием конусных роликов, расположенных между водилом и забурником через равные углы, за счет чего устройство будет представлять естественную динамически-уравновешенную механическую систему. Указаны преимущества данного устройства относительно предшествующих прототипов. По принципиальной схеме определена половина угла всего устройства, состоящая из угла между центром устройства и осью конусных роликов α и угла наклона образующих конусного ролика β. По схеме конусного ролика выражена формула для определения меньших радиуса и диаметра конусного ролика. Также определены средний радиус и длина образующей конусного ролика. Рассмотрена схема определения площади контакта конусного ролика с грунтом. По этой схеме составлена зависимость, из которой определена длина дуги площади контакта конусного ролика с грунтом. Выражена площадь контакта образующей конусного ролика с поверхностью грунта. По принципиальной схеме устройства определена реакция опорной поверхности конусного ролика на грунт. Записана формула для определения напряжения на контактной поверхности конусного ролика. Составлена формула силы трения, с помощью которой определен необходимый крутящий момент для начала вращения одного конусного ролика. Определена зависимость крутящего момента на приводном валу от геометрических характеристик устройства и от механических характеристик грунта с учетом количества конусных роликов и передаточного отношения. Выведена формула для определения осевой силы внедрения, действующей на один конусный ролик. Определена зависимость осевой силы внедрения от геометрических параметров устройства и от механических характеристик грунта с учетом количества конусных роликов.
Математическая модель, дорожно-строительные машины, раскатка котлованов, динамически-уравновешенная система, конусный раскатчик, конусные ролики, глубокое уплотнение грунтов
Короткий адрес: https://sciup.org/147233507
IDR: 147233507 | УДК: 622.6 | DOI: 10.14529/engin210206
Mathematical modeling of a device for deep compaction of soils
In this article, we consider a schematic diagram of a device for deep compaction of soils using cone rollers located between the driver and the fence at equal angles, due to which the device will represent a natural dynamically balanced mechanical system. The advantages of this device relative to the previous prototypes are indicated. According to the schematic diagram, half of the angle of the entire device is determined, consisting of the angle between the center of the device and the axis of the cone rollers α and the angle of inclination of the forming cone rollers β. According to the scheme of the cone roller, the formula for determining the smaller radius and diameter of the cone roller is expressed. The average radius and the length of the cone roller generatrix are also determined. The scheme of determining the contact area of the cone roller with the ground is considered. According to this scheme, a dependence is made, from which the arc length of the contact area of the cone roller with the ground is determined. The contact area of the forming cone roller with the ground surface is expressed. According to the schematic diagram of the device, the reaction of the support surface of the cone roller to the ground is determined. The formula for determining the stress on the contact surface of the cone roller is written. The formula of the friction force, which is used to determine the necessary torque to start the rotation of a single cone roller, is compiled. The dependence of the torque on the drive shaft on the geometric characteristics of the device and on the mechanical characteristics of the ground, taking into account the number of cone rollers and the gear ratio, is determined. A formula is derived for determining the axial insertion force acting on a single cone roller. The dependence of the axial force of the embedding on the geometric parameters of the device and on the mechanical characteristics of the soil, taking into account the number of cone rollers, is determined.
Текст научной статьи Математическое моделирование устройства для глубокого уплотнения грунтов
Современные дорожно-строительные машины: катки, трамбовки, виброплиты и т. п. – при возведении насыпи из различных грунтов осуществляют послойное уплотнение насыпных материалов толщиной 0,3…0,8 м [1–11].
Для уплотнения грунтов на большую глубину, достигающую нескольких метров: земляное полотно автомобильных дорог, гидротехнических сооружений (дамб, плотин) и другие насыпи высотой до 4–6 м – целесообразно изучить опыт применения оборудования для уплотнения грунтов при строительстве зданий и сооружений [12].
Известны способы уплотнения грунтов с помощью конусных оболочек, внедряемых в грунт с помощью ударных импульсов [12] и методом раскатки [13]. Как показывают исследования учёных из г. Омска и Новосибирска, плотность грунта в результате глубинного уплотнения может быть повышена на 20–25 %, а несущая способность в 1,5–2 раза.
Относительными недостатками применяемых известных конструкций являются большая площадь контактной поверхности рабочего органа с грунтом, достигающая 6 м2, что требует установки гидромолотов большой мощности, и динамическая неуравновешенность механической системы устройства для раскатки котлованов [14, 15] с коленчатым валом и одним конусным роликом (рис. 1).
Кафедра «Колесные и гусеничные машины» ЮУрГУ (г. Челябинск) модернизировала устройство для раскатки котлованов, применив динамически-уравновешенную систему за счет усовершенствования конструкции устройства для глубокого уплотнения грунтов [16] с помощью математического моделирования.
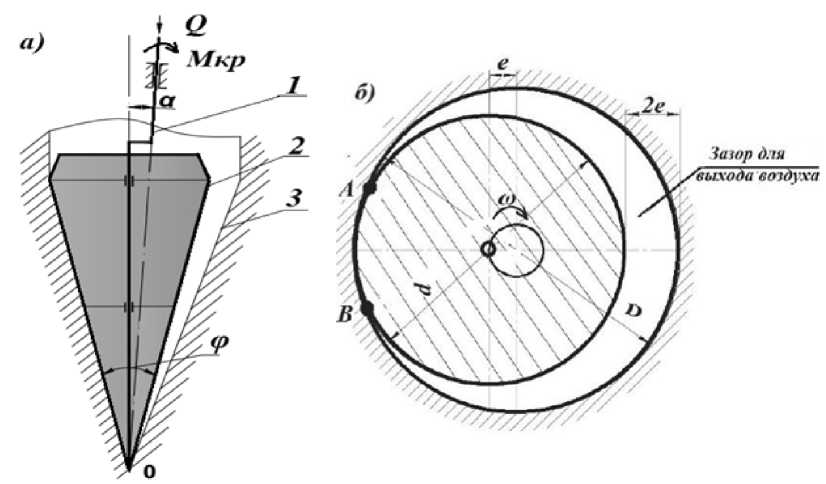
Рис. 1. Схема устройства для раскатки котлованов: а – вид сбоку, б – вид сверху; 1 – коленчатый вал, 2 – рабочий орган, 3 – котлован
Для начала математического моделирования [17, 18] составим принципиальную схему устройства (рис. 2) с изображением сил, действующих на него.
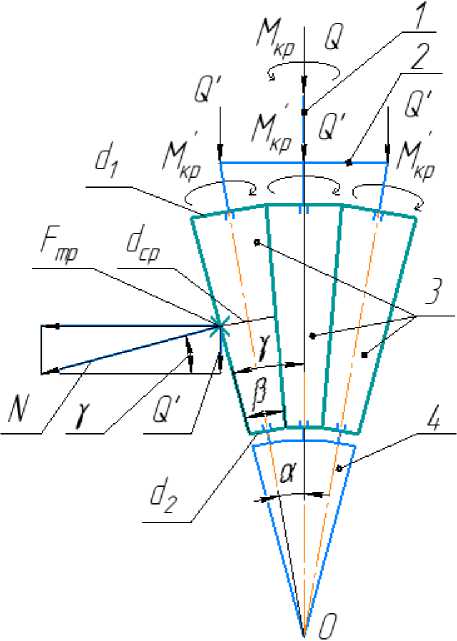
Рис. 2. Принципиальная схема устройства для глубокого уплотнения грунтов
Устройство содержит вал приводной 1, водило 2, конусные ролики 3, расположенные между водилом и забурником 4 под равными углами.
Численные методы моделирования
Из рис. 2 определим половину угла устройства по формуле (1):
У = а + 2 , (1)
где a - угол между центром устройства и осью конусных роликов, град.; ^ - угол наклона образующих конусных роликов, град.
Представим конусный ролик в виде схемы, отображенной на рис. 3.
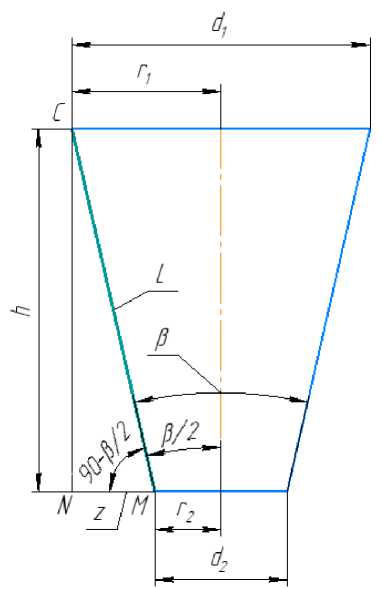
Рис. 3. Принципиальная схема конусного ролика
Согласно рис. 3, определим меньший диаметр d2. Для начала выразим формулу (2) для определения меньшего радиуса г2 :
Г2 = Г! — Z,
где г - больший радиус конусного ролика, м; г2 - меньший радиус конусного ролика, м; z - величина катета NM, м.
Из прямоугольного треугольника CNM (см. рис. 3) определим катет NM через тригонометрическое соотношение углов по формуле:
NM = z = h • ctg (90 — 2 ), где h - величина катета CN, высота конусного ролика, м.
Подставим выражение (3) в (2) и получим формулу:
Г = Г
— h • ctg (90 — 2^
Запишем радиусы г2 и г через диаметры d2 и d! соответственно и получим выражение:
Т = ^-h • ctg (90 - 2у (5)
После проведения алгебраических преобразований получаем окончательное выражение для нахождения меньшего диаметра d2 в зависимости от геометрических размеров большего диаметра d! :
d2 = d! — 2 • h • ctg (90-2), где d! - больший диаметр конусного ролика, м; d2 - меньший диаметр конусного ролика, м.
Согласно рис. 2, определим средний радиус конусного ролика по формуле:
d cp _ d t+d2
ГсР = 2 = 4 , где гср - средний радиус конусного ролика, м; dcp - средний диаметр конусного ролика, м.
Согласно рис. 2 определим зависимость между осевой силой внедрения и нормальной силой по формуле:
stay = —, N ’ где Q - осевая сила внедрения, действующая на один конусный ролик, Н; N - реакция опорной поверхности (нормальная сила) конусного ролика на грунт, Н.
Из рис. 3 найдем зависимость между длиной образующей конусного ролика и его высотой по формуле:
cos(f)=7,
где L - длина образующей конусного ролика, м; h - высота конусного ролика, м. Определим длину образующей конусного ролика по формуле:
L = —-
L ™®
Для определения площади контакта конусного ролика с грунтом в котловане воспользуемся схемой, представленной на рис. 4.
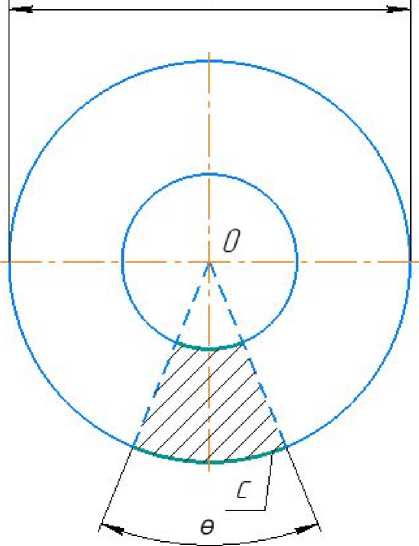
Рис. 4. Принципиальная схема определения площади контакта конусного ролика с грунтом
Составим пропорциональную зависимость к рис. 4:
(360° ^ Я • ^! I в ^ х,
где d^ - больший диаметр конусного ролика, м; в - угол, учитывающий соприкосновение дуги конусного ролика с грунтом, определяется экспериментальным путём, град.; х - длина дуги пло- щади контакта конусного ролика с грунтом, м.
Выразим х из зависимости (11) и представим в виде выражения:
л-d -S X = ---
.
Учитывая формулы (10) и (12), определим площадь контакта образующей конусного ролика
с поверхностью грунта по формуле:
K-dv6-h
S = х • L =------у^.
360°-cos( | )
Численные методы моделирования
Используя формулу (13) и рис. 2, определим реакцию опорной поверхности (нормальную силу) конусного ролика на грунт по формуле:
ff-n-di-0-h.
N = a^S = o1 ,p , 360°-cos( | j где a - напряжение на контактной поверхности конусного ролика, Па.
Найдем напряжение на контактной поверхности конусного ролика по формуле: a = С • у " ,
где С - коэффициент общей деформации грунта, м^ [19]; ц - показатель степени, характеризующий процесс деформации; у - деформация радиуса скважины, м.
Определим силу трения по формуле:
г — f м — f-"-°-d1-0-h
^тр J • N /Ох , р 360°-cos(U
где / - коэффициент трения различных грунтов [20].
Согласно формулам (16) и (7), определим необходимый крутящий момент для начала вращения одного конусного ролика по формуле:
М — F
1 1кр 1 тр
f-a-n-d1-0-h-(d1+d2)
• ^ ср =-------------------
1440°-cos( ^ )
,
где Мкр - крутящий момент, необходимый для вращения одного конусного ролика, Нм.
Составим выражение для определения крутящего момента планетарного механизма устройства:
M =
М кр t kp ,
где iK p - передаточное отношение планетарного механизма устройства; n - количество конусных роликов.
Выразим крутящий момент, необходимый для вращения устройства, из формулы (18) и запишем выражение:
М кр =
n-f-CT-o-d1-0-h-(d1+d 2 )-(ty(a+ 2 )-ty( | ))
1440°.Cos( S ). t5 ( S )
.
Из выражений (8) и (14), заменив угол у значением из (1), определим осевую силу внедрения, действующую на один конусный ролик, по формуле:
Q = N • sin у =
a-n-d1-0-h-stn(a+^
360°-cos^ l ^
.
Составим формулу для определения осевой силы внедрения, действующей на приводной вал устройства:
Q ' = ; .
где Q - осевая сила внедрения, действующая на один конусный ролик, Н; Q - осевая сила внедрения, действующая на приводной вал устройства, Н.
Q = n^Q =
n-o'-o-d1-0-h-stn(a+ ^ )
360°-cos( l ^
.
Выводы
Список литературы Математическое моделирование устройства для глубокого уплотнения грунтов
- Справочник дорожного мастера. Строительство, эксплуатация и ремонт автомобильных дорог: учебно-практическое пособие / С.Г. Цупиков, А.Д. Гриценко и др. – М.: Инфра-Инженерия, 2005. – 928 с.
- Машины для земляных работ. Конструкция. Расчет. Потребительские свойства: в 2 кн. Кн. 2: Погрузочно-разгрузочные и уплотняющие машины: учеб. пособие для вузов / В.И. Баловнев, С.Н. Глаголев, Р.Г. Данилов и др.; под общ. ред. В.И. Баловнева. – Белгород: Изд-во БГТУ, 2011. – 464 с.
- Abbas, R.K. A review on the wear of oil drill bits (conventional and state of the art approaches for wear reduction and quantification) / R.K. Abbas // Eng. Fail. Anal. – 2018. – Vol. 90. – P. 554–584. – https://doi.org/10.1016 /j.engfailanal.2018.03.026.
- Abu-Zarifa, A. Theory of Machines /A. Abu-Zarifa // Islamic University of Gaza. Department of Mechanical Engineering. – 2012. – 41p.
- Baidya, D.K. Investigation of Resonant Frequency and Amplitude of Vibrating Footing Resting on a Layered Soil System / D.K. Baidya, G.M. Krishna // Geotechnical Testing Journal. – 2001. – Vol. 24, no. 4. – P. 409–417.
- Dumn, D.J. Solid mechanics. Dynamics. Tutorial – Damped vibrations / D.J. Dumn. – Handbook, 2007. – 13 p.
- Dynamic soil compaction – recent methods and research tools for innovative heavy equipment approache / P. Holger, B. Marco, K. Alexander et al. // The 5th International Conference of Euro Asia Civil Engineering Forum (EACEF-5). – 2015. – No. 125. – P. 390–396. DOI: 10.1016/j.proeng.2015.11.096.
- Forssblad, L. Vibratory Soil and Rock Fill Compaction / L. Forssblad. – Stockholm: DynapacMaskin AB, 1981. – 175 p.
- Gashaw, Y.A. Dozer Production. In Fundamentals of Earthmoving Equipment / Y.A. Gashaw. – Addis Ababa, 2009. – 128p.
- Massarsch, K.R. Deep vibratory compaction of granular soils / K.R. Massarsch, B.H. Fellenius. – Chapter 19 in Ground Improvement-Case Histories. – Elsevier publishers, 2005. – P. 633–658.
- Method of increasing the roughness of the existing road / O. Skrypchenko, K. Katerina, K. Tetiana, A. Bieliatynskyi // 15th International scientific conference «Underground Urbanisation as a Prerequisitefor Sustainable Development». – 2016. – no. 165. – P. 1766–1770. DOI: 10.1016/j.proeng.2016.11.920.
- Технология и оборудование для глубокого трамбования грунта / В.С.Миронов, П.Я. Фадеев. В.Я.Фадеев, М.С. Мандрик // Строительные и дорожные машины. – 2015.– № 8.– С. 2–4.
- Пат. № 1836527 Российская Федерация. Устройство для раскатки скважин в грунте / Л.М. Бобылев, А.Л. Бобылев; заявители и патентообладатели Л.М. Бобылев, А.Л. Бобылев – № 5000939/03; заявл. 12.07.1991; опубл. 23.08.1993, Бюл. № 31. – 4 с.
- Пат. № 161212 Российская Федерация. Устройство для раскатки котлованов / Е.И. Кромский, Д.Р. Каюпов, А.С. Гладченко; заявитель и патентообладатель Е.И. Кромский, Д.Р. Каюпов, А.С. Гладченко. – № 2015141387; заявл. 29.09.2015; опубл. 10.04.2016, Бюл. № 10. – 5 с.
- Advances in numerical modelling of different ground improvement techniques / E. Heins, K.-F. Seitz, A. Chmelnizkij et al. // Geotechnical Engineering. – 2017. – No. 48(3). – P. 87–94.
- Пат. № 199875 Российская Федерация. Устройство для глубокого уплотнения грунтов / Е.И. Кромский, С.В. Кондаков, К.А. Гундарев, К.З. Тиллоев, М.А. Асфандияров; заявители и патентообладатели Е.И. Кромский, С.В. Кондаков, К.А. Гундарев, К.З. Тиллоев, М.А. Асфандияров. – № 2020109847; заявл. 05.03.2020; опубл. 24.09.2020, Бюл. № 27. – 7 с.
- Самарский, А.А. Математическое моделирование / А.А. Самарский, А.П. Михайлов. – М.: Наука. Физматлит, 1997. – 320 с.
- Shima, H. Higher Mathematics for Physicsand Engineering / H. Shima, T. Nakayama. – Springer-Verlag Berlin Heidelberg, 2010. – 711 p.
- Пономаренко, Ю.Е. Устройство набивных свай с применением винтового рабочего органа / Ю.Е. Пономаренко, Н.Б. Баранов // Проблемы механики грунтов и фундаментостроения в сложных грунтовых условиях: сб. трудов. – Уфа: Изд-во Башниистрой, 2006. – С. 115–118.
- Крагельский, И.В. Коэффициенты трения: справочное пособие / И.В. Крагельский, И.Э. Виноградова // 2-е изд., перераб. и доп. – М.: Гос. науч.-техн. изд-во машиностр. лит-ры, 1962. – 223 с.
