Математическое обеспечение иерархического цифрового управления сложным технологическим объектом

Автор: Ларкин Е.В., Богомолов А.В., Привалов А.Н., Акименко Т.А.
Рубрика: Математика
Статья в выпуске: 4 т.16, 2024 года.
Бесплатный доступ
Исследуется вопрос синтеза математического обеспечения иерархического цифрового управления сложным технологическим объектом на основе универсальных контроллеров с гибким программированием. Для преодоления ограничений на быстродействие контроллеров, функционирующих в режиме реального времени, при усложнении законов управления и расширении классов управляемых объектов предложено разделение контроллеров на стратегический, тактический и функционально-логический иерархические уровни. Определены функции и построены алгоритмы обработки данных контроллерами каждого иерархического уровня. Показано, что согласованное функционирование исследуемой системы цифрового управления сводится к обмену данными между контроллерами разных уровней, осуществляемому программно, одинаково для контроллеров всех уровней. Получены зависимости для оценки периода перезапуска управляющих программ, работающих по гамильтонову циклу, а также задержки передачи данных для случая, когда на контроллерах тактического и функционально-логического уровней реализован алгоритм пропорционально-интегрально-дифференцирующего регулятора. Показаны особенности управления режимами функционирования контроллеров тактического и функционально-логического уровней за счет реализации на стратегическом уровне нейронной сети.
Цифровое управление, система управления, иерархическиеуровни управления, контроллер с гибким программированием, гамильтонов цикл, полумарковский процесс, нейронная сеть
Короткий адрес: https://sciup.org/147246005
IDR: 147246005 | УДК: 004.942 | DOI: 10.14529/mmph240406
Mathematical support for hierarchical digital control of a complex technological object
The paper investigates the synthesis of mathematical support for hierarchical digital control of a complex technological object based on universal controllers with flexible programming. In order to overcome the limitations on the performance of controllers operating in real time, with the complexity of control laws and the expansion of the classes of controlled objects, controllers can be divided into strategic, tactical and functional-logical hierarchical levels. The authors define the functions and construct the algorithms for processing data by the controllers of each hierarchical level. The coordinated functioning of the digital control system under study is reduced to the exchange of data between controllers of different levels, carried out programmatically, equally for controllers of all levels. The authors obtain the dependencies for calculating the estimate of the restart period of control programs operating on the Hamiltonian cycle, and the data transmission delay for the case when the proportional-integral-differentiative regulator algorithm is implemented on the controllers of the tactical and functional-logical levels. The paper highlights the features of controlling the operating modes of the controllers of the tactical and functional-logical levels due to the implementation of a neural network at the strategic level.
Текст научной статьи Математическое обеспечение иерархического цифрового управления сложным технологическим объектом
Структура системы иерархического цифрового управления сложным технологическим объектом приведена на рис. 1.
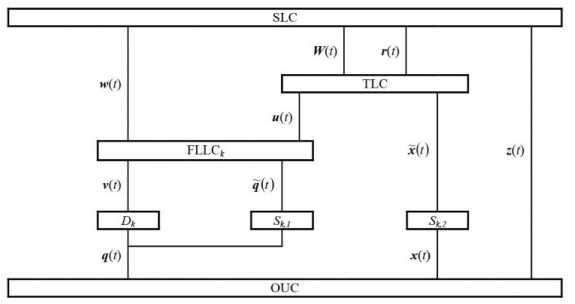
Рис. 1. Структура системы иерархического цифрового управления сложным технологическим объектом
В состав системы (рис. 1) входят: контроллер стратегического уровня (SLC-контроллер), контроллер тактического уровня (TLC-контроллер) и K контроллеров функционально-логического уровня (FLLCk-контроллеры, ке{1, ..., K} [19]. Разделение контроллеров по уровням может быть реальным или виртуальным. Например, SLC- и TLC-контроллеры могут быть реализованы на одной физической ЭВМ с виртуальным разделением по уровням, а FLLCк-контроллеры могут объединяться в группы, каждая из которых реализуется на одном физическом цифровом контроллере.
При управлении объектом (OUC) на каждом иерархическом уровне реализуется своя часть интегрального алгоритма управления.
На верхнем, стратегическом уровне формируется цель управления W ( t ) в виде развивающейся в физическом времени последовательности изменений вектора состояния OUC, x ( t ) = { x k ( t )}, которая обеспечивает, например выпуск возможно большего объема продукции в единицу времени, поддержание режима функционирования технологического оборудования, согласованное взаимодействие компонентов робототехнических систем и комплексов специального назначения и т. п. [20-24].
Из глобальной цели W ( t ) TLC-контроллер формирует вектор u ( t ) = { u k ( t )} текущих желаемых значений вектора x ( t ) состояний OUC, который передается на FLLC к -контроллеры. Кроме того, на эти контроллеры с выходов SLC-контроллера могут быть непосредственно переданы значения настроек w ( t ) параметров регуляторов, необходимые для реализации оптимальных режимов функционирования приводов D k с сенсорами S 1,k в контурах локальных обратных связей.
По вектору желаемых значений состояний u ( t ) и результатам измерений q ( t ) = [ q 1 ( t ) = { q k ( t )} [25, 26] с помощью сенсоров S 1,k физических перемещений q ( t )={ q k ( t )} приводов D k формируются воздействия на объект управления, которые приводят к изменению его состояния x ( t ). Результаты измерения в виде вектора x ( t ) = { x k ( t )} возвращаются на уровень TLC, обеспечивая обратную связь по регулируемым параметрам технологической установки. Кроме того, вектор [ u ( t ) ,x ( t ) ] = [ u 1 ( t ) , формируемый как объединение векторов u ( t ) и x ( t ) , возвращается в SLC для определения цели управления w ( t ) на следующем шаге функционирования системы.
Также на уровень SLC передаются элементы векторов z ( t ) = { z k ( t )} и r ( t ) = { r k ( t )}. Элементы вектора z ( t ) напрямую не используются в процессе управления, но дают дополнительную информацию о состоянии объекта, например, о температуре, давлении и влажности в приобъектной зоне, о срабатывании концевых выключателей, аварийных клапанов и т. п. Элементы вектора r ( t ) представляют собой логические переменные, которые несут информацию о результатах отработки системы предыдущего шага управления. Совместно элементы векторов x ( t ) , u ( t ), z ( t ), r ( t ) образуют пространство принятия решений в системе управления объектом OUC.
Математическое обеспечение алгоритмов, реализованных в контроллерах
SLC-, TLC- и FLLC k -контроллеры работают по типовому циклическому алгоритму общего вида, показанному на рис. 2, а , состоящему из неисполнимых операторов a 0(a) «Начало» и a J(a)+ 1 «Конец» и исполняемых операторов a j(a), j g {1, ..., J }. Циклическим алгоритм делает обратная связь [ a J(a)+ 1 , a j(a) ], показанная на рис. 2 пунктирной стрелкой.
Исполнимые операторы реализуют:
в алгоритме SLC-контроллера - функции ввода данных векторов x (t), u (t), z (t), r (t), расчет элементов вектора w (t) и передачу рассчитанных значений в TLC, расчет элементов вектора настроек w (t) параметров регуляторов и передачу рассчитанных значений в FLLCk- контроллеры;
в алгоритме TLC-контроллера - функции: ввода векторов x ( t ) и w ( t ), расчета и вывода в FLLC k -контроллеры элементов u ( t ), расчета и возврата в SLC-контроллер элементов вектора r ( t );
в алгоритме каждого FLLC k -контроллера - функции ввода значений u k и q k , расчета и вы-
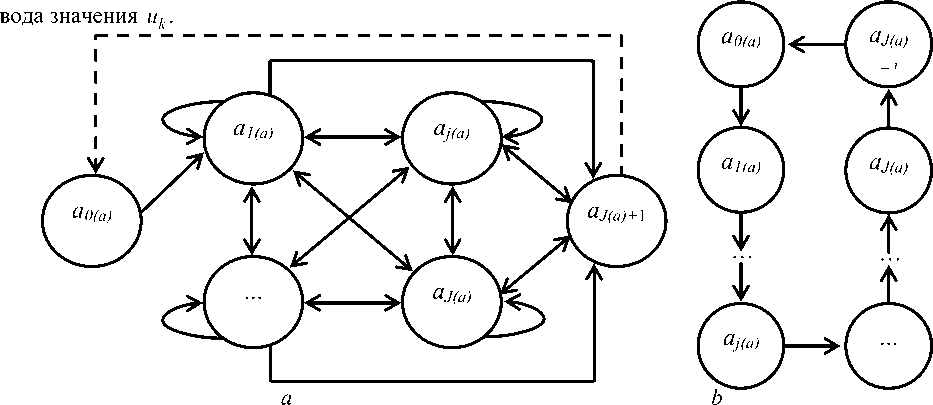
Рис. 2. Структура типового алгоритма контроллеров всех уровней: a – общего вида; b – линейно-циклического вида
Вследствие того, что SLC-, TLC- и FLLC k-контроллеры интерпретируют свои алгоритмы в реальном физическом времени t последовательно, оператор за оператором, между обращениями к внешним по отношению к рассматриваемому контроллеру устройствам естественным образом образуются временные интервалы (задержки) [27–29]. Наличие интервалов времени между тран- закциями, генерируемыми каждым контроллером, должно учитываться при проектировании программного обеспечения контроллеров системы. Универсальным подходом к оцениванию временных интервалов является построение полумарковской модели типового алгоритма [30-32]:
М = { A, h ( t ) } , где A = { a 0(a), a i(a),... a ja), a J(a)+ 1 } - множество состояний, совпадающее с множеством исполнимых и неисполнимых операторов; h ( t ) = ^ hj^ n ta^t ) ] = p ® f ( t ) - полумарковская матрица, описывающая временные и стохастические свойства алгоритма; p = ^ р^ п(а) ] - стохастическая матрица; f ( t ) = [ f ( a ) , „ ( a ) ( t ) ] - матрица плотностей распределения времени пребывания процесса в состояниях множества А до переключения в сопряженные состояния, причем размерности всех матриц [ J ( a )+2] х [ J ( a )+2].
Полумарковская модель правильно синтезированного алгоритма обладает следующими свойствами:
для каждого состояния aj(a)gA существует хотя бы один путь а0^— ^а^ и хотя бы один путь а}(а) — aj(^+j, то есть полумарковский процесс при замкнутой обратной связи является возвратным;
вероятности переключения между состояниями a j(a) удовлетворяют условиям
Математика
n
J ( a )
1, j ( a ) ^ J ( a ) + 1,
I p j ( a ) n n ( a H
( a ) = 0 ( a )
or j ( a ) = J ( a ) + 1, feedback is closed;
0, j ( a ) = J ( a ) + 1, feedback is open;
на время пребывания в состояниях полумарковского процесса накладываются ограничения »
0
<
T
j
(
a
)
,
n
(
a
)
min
~
arg
fj
(
a
)
,
n
(
a
)
(
t
)
“
T
j
(
a
)
,
n
(
a
)
max
в модели алгоритма с замкнутой обратной связью [ J ( а )+1]-я строка полумарковской матрицы h ( t ) имеет вид ^ fJ ( a )+ 1 , 0 ( a ) ( t ) ,..., 0,..., о ] , где f J ( a )+ 1 , 0 ( a ) ( t ) - плотность распределения времени работы операционной системы контроллера по перезапуску исследуемого алгоритма.
Полумарковский процесс является возвратным, плотности распределения времени пребывания в его состояниях имеют область определения, локализованную в положительной полуплоскости, следовательно, процесс является эргодическим [30–32]. Плотность распределения времени возврата в состояние а о (а) полумарковского процесса ^ и среднее время периода равны соответственно
^
f c ( t ) = I 0 ( . ) L - I { L [ h ' ( t ) ] }{
. ^= 1
»
I J (a )+1* fJ (a )+1,0( a)( t ) ; Tc = J tfc ( t ) dt , где fc (t) - плотность распределения времени от начала текущего цикла до начала следующего цикла работы программы; L [...], L [...] соответственно прямое и обратное преобразование Лапласа; I R(a) — [J(а )+2]-элементный вектор-строка, нулевой элемент которого равен единице, а остальные элементы равны нулю; I^+1 - [J(а)+2]-элементный вектор-столбец, последний,
[ J ( а )+1]-й элемент которого равен единице, а остальные элементы равны нулю; h ' ( t ) - полумар-ковский процесс, описывающий алгоритм с разомкнутой обратной связью, у которого [ J ( а )+1]-я строка имеет вид [0 , ..., 0]; * - обозначение операции свертки.
На структуру исследуемого алгоритма может быть дополнительно наложено следующее ограничение: в течение одного цикла каждый канал, связывающий один контроллер с другими контроллерами и периферийным оборудованием, опрашивается по одному разу, а, следовательно, исполнимые операторы a j(a) образуют гамильтонов цикл на графе (см. рис. 2, а ).
Схема линейно-циклического алгоритма, представляющего один из возможных гамильтоновых циклов, приведена на рис. 2, b . Для полумарковского процесса с гамильтоновым циклом
J ( a ) + 1
f c ( t ) = f 0 ( a ) ( t ) * f a ) ( t ) *-* f j ( a ) ( t ) *-* J ( a ) ( t ) * J ( a ) . , ( t ) ; T c = I TH a ) •
I ( a ) = 0 ( a )
где f^а^ (t) и T^ - плотность распределения и математическое ожидание времени пребывания полумарковского процесса в состоянии aj(a) гамильтонова цикла до его переключения в следующее состояние.
Математическое обеспечение обработки данных в FLLC k- контроллере
Реализация полумарковской модели обработки данных на нижнем (функциональнологическом) уровне иерархии в системах с механизмами, в которых присутствует сухое трение, и естественное ограничение на скорость перемещения терминального элемента (руля, задвижки, клапана и т. п.), а также инерционность сенсора S k, 1 , дает следующую систему дифференциальных уравнений третьего порядка в форме Коши:
" dqk ,i ( t ) (л
= qk ,2 ( t ;
< dqk2 (t) = -ak,1 • qk,2 - ak,2 • sgn [qk,2 (t )] + ak,3vk (t ), q^)=—ak ,4 qk(t)+qk ,i (t), где qk,1 (t) = qk (t) - физическое положение терминального элемента; qk - значение положения, измеренное сенсором Sk,1 ; qk,2 – скорость перемещения терминального элемента с учетом ограничения; ak2 • sgn [qk2 (t)] - сила сухого трения; ak,1 ^ ak,4 - коэффициенты, определяющие динамику и точность работы механизма исполнительного устройства и сенсора.
Величины q k ,2 и q k ,2 связаны соотношениями qk ,2 = q k ,2 при q k ,2min ^ q k ,2 ^ q k ,2 m max ';
q k ,2 = q k ,2 min при q k ,2 ^ q k ,2 min ; q k ,2 = q k ,2max при q k ,2 ^ q k ,2max .
Наиболее часто на практике при обработке данных в FLLCk-контроллере применяется алгоритм пропорционально-интегрально-дифференцирующего (ПИД) регулятора [33, 34], который имеет вид vc, k ( t ) = aFL,P, k ( WP, k ) ' ^FL, k ( t ) + aFL,D, k ( wD, k ) X .' + aFL,In, k ( win, k ) ’J ^FL, k (f) dT;
I „ — 0 ,
I / fl, k ( t ) = u k ( t )- q k ( t ) ;
где / fl , k ( t ) - ошибка в установлении заданного положения q k ( t ) терминального элемента; a FL , P , k ( w P , k ) , a FL , D , k ( w D , k ) , a FIJn , k ( w In , k ) - коэффициенты при пропорциональной, интегральной, дифференциальной составляющих соответственно, определяющие качество переходных процессов на FLLC k -уровне; w c , k =[ w P , k , w D , k , w In , k ] - вектор данных, вводимых в FLLC k -контроллеры с SLC-контроллера для установления оптимальных режимов управления OUC.
Каждый FLLC k -контроллер является цифровым, поэтому производная и интеграл в алгоритме ПИД-регулятора определяются соответственно по формулам конечной разности и конечной суммы [35, 36], т. е.
d^r ( t ) n
----T----= ^ FL, k ( n ) - ^ FL, k ( n - 1 ) ; J ^ FL, k ( T ) d T = t f FL, k ( i ) , dt 0 i = 0
где n - дискретное время, связанное с реальным физическим временем соотношением t = T c , FL , k n ; T c ,FL, k – период опроса FLLC k - контроллеров.
Для вычисления производной каждый FLLC k -контроллер должен осуществить две транзакции с TLC-контроллером и две транзакции с сенсором S 1,k . Вследствие дополнительных ограничений, которые накладываются на алгоритмы обработки данных по гамильтонову циклу, на это необходимо затратить 2 T c ,TLC, k единицы физического времени. Поэтому управляющее воздействие на выходе FLLC k -контроллера появляется с дополнительной задержкой по времени относительно момента поступления данных u k ( t ) и q k ( t ) , т. е.
vk ( t ) = vc , k ( t - 2Tc ,FL, k ) .
Накопление конечной суммы происходит в течение всех периодов работы контроллера и не оказывает существенного влияния на время чистого запаздывания в контуре обратной связи.
Математическое обеспечение обработки данных в TLC-контроллере
Объект управления, в котором TLC-контроллер обеспечивает заданный режим функционирования, в общем случае описывается системой нелинейных дифференциальных уравнений:
Математика
V k
, M d m ( x ' x ( t ' d M 1 x ' x ( t ' 1 d m ( q ' q ( t ' d M 1 q 1 q ( t '
= 0, 1 < k < K ,
t ,x ( t ' d m ( x ' ■-■ dt M ( x ' ,q ( t ' dt *' ’-, d M ( q '
где q ( t ) - вектор воздействий, формируемый на уровне FLLC k - контроллеров; x ( t ) - вектор параметров состояния OUC, измеряемых сенсорами S k,2 и вводимых в TLC-контроллер.
С целью унификации программного обеспечения при расчете элементов вектора u(t) применяется алгоритм ПИД-регулятора, который при отсутствии алгоритмически создаваемых перекрестных связей между каналами управления имеет вид uk ( t ' = aTLC,P,k
‘ ^ TLC, k ( t ' + ^ TLC,D, k
d S TLC,k ( t ' dt
t
+ a TLC,In, k * f ^ TLC, k ( т ' d T ;
^LC,k (t ' = Wk (t'- xk (t' ,1 < k < K, где ^TLCk (t' - текущая ошибка установления заданного значения xk (t'; ^TLCPk, aTLC P k,
^TLc , P , k — коэффициенты передачи ПИД-регулятора по пропорциональной, дифференциальной и интегральной составляющим; Wk (t' - цель управления, определяемая на стратегическом уровне как желаемое значение регулируемого параметра xk (t'.
Производная и интеграл в алгоритме ПИД-регулятора также рассчитываются по формулам конечной разности и конечной суммы, поэтому между сигналами x (t) и u (t) возникает задержка по времени, равная 2Tc TLC k. Эта задержка может быть отнесена к сенсорам S2,k, поскольку пере- крестные связи между каналами на уровне алгоритма функционирования TLC-контроллера отсутствуют. С учетом задержек по времени модель преобразования сигналов x (t) сенсорами при- нимает вид dxk (t 2Tc tlc k' ~ / \ / \ aS,k, 1 ^ + xk ( t - 2Tc,TLC ,, k ' = aS ,k, 2 xk ( t ' , где aS,k,1 и aS,k,2 - параметры, определяющие быстродействие и коэффициент передачи S1,k и S2,k соответственно.
Кроме интервала 2T c TLC k при работе TLC-контроллера возникает такое явление, как перекос данных. Без нарушения общности можно считать, что внутри гамильтонова цикла первой транзакцией является ввод элемента Х 1 ( t ' , после чего в порядке, определенном алгоритмом, вводятся оставшиеся элементы указанного вектора и выводятся элементы вектора v ( t ). Задержки по времени между началом ввода X 1 и началами ввода X 2 , ..., x k , ..., x K порождают перекос данных T n,1 = 0, T n,2- , T n, k , -, T n, K при вводе. Задержки по времени T out,i = о, T out,2 ,..., T out, k ,•.., T out, K ме"
жду началом вывода элемента v i вектора v ( t ) и началами выводов элементов v 2 , ..., v k , ..., v K порождают перекос данных при выводе v ( t ). Временной интервал T del k/ , алгоритмически формируемый между вводом x k и выводом v l , дает часть времени чистого запаздывания формирования l -го элемента вектора управления относительно к -го элемента вектора состояния. Полное время чистого запаздывания определяется порядком следования операторов в гамильтоновом цикле.
Вектор r (t) = {rk (t)} формируется как вектор подтверждения исполнения команды W(t). Элементы этого вектора обнуляются после передачи в SLC-контроллер и устанавливаются в единицу, если к началу следующей транзакции величина ошибки ^TLC k (t' = Wk (t' - xk (t' выполнения команды не превышает заданного порога, то есть rk =1 , when ^TLC, k (t' < ^TLC , k , где £tlc k - пороговое значение сигнала ошибки по к-му регулируемому параметру OUC, xk (t'.
Записанные выражения представляют собой полную модель функционирования TLC-контроллера в составе иерархической системы управления.
Математическое обеспечение обработки данных в SLC-контроллере
В SLC-контроллере (на стратегическом иерархическом уровне) реализуются алгоритмы, обеспечивающие эффективные режимы работы оборудования. Одна из возможных реализаций подобного алгоритма – это нейронная сеть, которая используется для настройки параметров управления FLLC k - контроллеров [3]. Настройка осуществляется по результатам наблюдения состояния OUC, TLC, D k . Для принятия решения о настройке параметры, описывающие указанные блоки иерархической системы, в виде векторов u ( t ), x ( t ), r ( t ) передаются с соответствующих уровней в SLC. Дополнительно к перечисленным на этот уровень передаются данные о нерегулируемых параметрах OUC, обозначенные на рис. 1 как вектор z ( t ). Все переданные данные образуют параметрическое пространство y = u u x и r и z = [ у ^ ^,..., у .^ ^,..., у^ ^] принятия решения. Решение заключается в установлении значений элементов векторов W ( t ) и w ( t ) , передаваемых на уровни TLC- и FLLC k - контроллеров соответственно. Вектор
Для выбора векторов W ( t ) и w ( t ) в нейронную сеть уровня SLC-контроллеров включаются нейроны, формирующие в пространстве параметров y систему из J ( c ) гиперплоскостей:
J ( у )
X bj(c), j(у)yj(у) = cj(c) ,1( c J (c )< J ( c ), j (у )=>( у)
где b^j^ и c^c^ - параметры j ( c ) -го нейрона, задаваемые при настройке нейронной сети.
При подстановке в систему уравнений J(c) гиперплоскостей вектора yt = y(t) = [у1(у),t,...,yj(у),t,...,yJ(у),t ' текущих оценок параметров формируются значения cj.(c),t правых частей линейных уравнений J(c) гиперплоскостей.
J ( у )
X b j ( c ) , j ( у ) У j ( у ) , t = cJ ( c ) , t ,1 ( c ) < j ( c ) < J ( c ) ;
j ( у ) = 1 ( у )
В том случае если c^ct - c^> 0, то точка, определяющая состояние иерархической системы управления, находится над плоскостью J(c) гиперплоскостей; если c^c^ t - c^с^ < 0 , то под плоскостью, а если c^c- c^с^ = 0, то принадлежит плоскости. Поэтому в нейронную сеть вводится преобразование вектора yt в вектор о = [^(с),..., ^(с),...,^J(c)J логических переменных следующим образом:
Xwhen c j ( c ) , t — c j ( c )> 0;
а j ( c )=i
^0 otherwise, где 0, 1 – логический ноль и единица соответственно.
Дизъюнктивные нормальные формы, построенные из элементов вектора а , позволяют разбить пространство у на Н областей Д,..., D ^ ,..., D H , каждой из которых ставится в соответствие ^ -е значения векторов £ W ( t ) и £ w ( t ) , которые дают оптимальные настройки системы управления в этом конкретном режиме эксплуатации OUC. Дизъюнктивные нормальные формы имеют вид:
D = v
и
J ( c ) / \
1
<
£
,
c ft, c ) ^, j ( c > ( a i c ) )
Математика
J ( c )
где D % — дизъюнктивная нормальная форма, описывающая область D % ; а Л^U, j ( c )( ^ j ( c ) ) — и -я конституента единицы ^ -й нормальной формы; ^OJ (с)( ^ (с)) — логическая функция переменной а^с^ при ее вхождении в и -ю конституенту ^ -й нормальной формы.
Для нормальной работы нейронной сети на дизъюнктивные нормальные формы, описывающие области D % , накладывается ограничение:
D % n D z =0 , если % ^ Z .
Поэтому при принятии управленческого решения из всех областей, на которые разбивается пространство параметров, выбирается та единственная область D % , для которой D % = 1.
Настройка нейронной сети сводится к вариации параметров b и c , определяющих расположение J(c) гиперплоскостей в пространстве параметров y, и выбору таких значений векторов W(t) и w(t), которые обеспечивают оптимальный режим функционирования OUC в этом состоянии.
Заключение
Таким образом, в результате исследования сформированы требования к структуре иерархической системы управления сложными многоконтурными объектами. Для контроллеров каждого уровня предложены типовые алгоритмы реализации их функций и определены характеристики контроллеров как физических приборов, выполняющих эти функции. Показано, что реализация оптимальных режимов эксплуатации объекта управления возможна за счет реализации на верхнем иерархическом уровне нейронной сети. Дальнейшие исследования в этой области должны быть направлены на представление контроллера с иерархической структурой как системы массового обслуживания, каждый элемент которой является одновременно и обслуживающим прибором, и генератором потока запросов на обслуживание, что позволит оптимизировать информационные потоки внутри системы иерархического цифрового управления сложным технологическим объектом.
Работа выполнена при поддержке гранта РНФ 24-29-20256.
Список литературы Математическое обеспечение иерархического цифрового управления сложным технологическим объектом
- LofVing, M. Manufacturing Strategy Formulation, Leadership Style and Organizational Culture in Small and Medium-Sized Enterprises / M. LofVing, K. Safsten; M. Winroth // International Journal of Manufacturing Technology and Management. - 2016. - Vol. 30, no. 5. - P. 306-325.
- Composite Error Learning Robot Control using Discontinuous Lyapunov Analysis / Y. Pan, K. Guo, A. Bobtsov, Ch. Yang, H. Yu // IEEE Transactions on Automatic Control. - 2024. - Vol. 69, Iss. 3. - P. 1705-1712.
- Ле, В.Н. Обзор интеллектуальных систем управления и робототехнических задач в производстве аквакультуры / В.Н. Ле, А.Л. Ронжин // Морские интеллектуальные технологии. - 2024. -№ 1-1 (63). - С. 171-180.
- Meshcheryakov, R. Control of hyperlinked cyber-physical systems / R. Meshcheryakov // Proc. 14th International Conference on Electromechanics and Robotics "Zavalishin's Readings". Smart Innovation, Systems and Technologies. - 2020. - Т. 154. - С. 27-33.
- Эффективное функционирование смешанной неоднородной команды в коллаборативной робототехнической системе / Галин Р.Р., Широкий А.А., Магид Е.А. и др. // Информатика и автоматизация. - 2021. - Т. 20, № 6. - С. 1224-1253.
- Мещеряков, Р.В. Интеллектуальные робототехнические системы / Р.В. Мещеряков // Датчики и системы. - 2024. - № 2. - С. 12-17.
- Мещеряков, Р.В. Постановка задачи гетерогенного группового взаимодействия роботов при решении задач умного сада / Р.В. Мещеряков, А.С. Широков // Вестник Южно-Уральского государственного университета. Серия «Математика. Механика. Физика». - 2024. - Т. 16, № 2. -С. 41-49.
- Осипов, О.Ю. Проектирование цифровых моделей элементов электромашинной части электромехатронных модулей робототехнических систем / О.Ю. Осипов, Р.В. Мещеряков, М.Г. Шепеленко // Экстремальная робототехника. - 2017. - № 1. - С. 160-164.
- A Probabilistic Approach to Estimating Allowed SNR Values for Automotive LiDARs in "Smart Cities" under Various External Influences / R. Meshcheryakov, A. Iskhakov, M. Mamchenko et al. // Sensors. - 2022. - Vol. 22, no. 2, - P. 609. DOI: 10.3390/s22020609
- Постановка задачи реализации модели беспилотной авиационной транспортной системы с использованием технологий искусственного интеллекта / А.Л. Смолин, В.П. Кутахов, А.А. Захарова и др. // Искусственный интеллект. Теория и практика. - 2023. - № 1 (1). - С. 41-45.
- Landau, I.D. Digital Control Systems, Design, Identification and Implementation / I.D. Landau, G. Zito. - Springer, 2006. - 484 p.
- Astrom, J. Computer Controlled Systems: Theory and Design / J. Astrom, B. Wittenmark. -Tsinghua University Press, Prentice Hall, 1996. - 557 p.
- Ivutin A.N., Larkin E.V. Estimation of Latency in Embedded Real-Time Systems // 3-rd Meditteranean Conference on Embedded Computing (MECO-2014). Budva, Montenegro, 2014, P. 236239.
- Kilian C.T. Modern Control Technology: Components and systems / C.T. Kilian. - Thompson Delmar Learning. - 2000. - 644 p.
- Ларкин, Е.В. Моделирование надежности бортового оборудования мобильного робота / Е.В. Ларкин, Т.А. Акименко, А.В. Богомолов // Известия Саратовского университета. Новая серия. Серия: Математика. Механика. Информатика. - 2021. - Т. 21, Вып. 3. - С. 390-399.
- Babishin V., Taghipour S. Optimal maintenance policy for multicomponent systems with periodic and opportunistic inspections and preventive replacements // Applied Mathematical Modelling. -2016. - Vol. 40, Iss. 23-24. - Pp. 10480-10505.
- Digital Control of Continuous Production with Dry Friction at Actuators / E. Larkin, A. Privalov, A. Bogomolov, T. Akimenko // Smart Innovation, Systems and Technologies. - 2022. -Vol. 232. - P. 427-436.
- Сенсорные сети контроля состояния авиационной техники при испытаниях и эксплуатации / Е.С. Солдатов, А.В. Богомолов, Е.В. Ларкин, А.С. Солдатов // Авиакосмическое приборостроение. - 2024. - № 2. - С. 61-68.
- Структура иерархической системы цифрового управления сложным технологическим объектом / Е.В. Ларкин, А.В. Богомолов, А.Н. Привалов, Т.А. Акименко // Математические методы в технологиях и технике. - 2024. - № 6. - C. 63-66.
- Восстановление динамически искаженного сигнала на основе теории оптимальных динамических измерений / А.Л. Шестаков, А.А. Замышляева, Н.А. Манакова и др. // Автоматика и телемеханика. - 2021. - № 12. - С. 125-137.
- Ermolov, I.L. Models for Decision Making Support Systems in Robotics / I.L. Ermolov, S.S. Graskin, S.P. Khripunov // Studies in Systems, Decision and Control. - 2021. - Vol. 352. - P. 145149.
- Развитие теории оптимальных динамических измерений / Е.В. Бычков, С.А. Загребина, А.А. Замышляева и др. // Вестник Южно-Уральского государственного университета. Серия «Математическое моделирование и программирование». - 2022. - Т. 15, № 3. - С. 19-33.
- Bazhenov, E.I. Software for the Mobile Robot Spatial Orientation System / E.I. Bazhenov, S.A. Mokrushin, S.I. Okhapkin // Вестник ЮУрГУ. Серия «Математическое моделирование и программирование». - 2021. - Т. 14, № 2. - С. 64-69.
- Алгоритм численного нахождения оптимального измерения, искаженного инерционностью, резонансами и деградацией измерительного устройства / А.Л. Шестаков, С.А. Загребина, H.А. Манакова и др. // Автоматика и телемеханика. - 2021. - № 1. - С. 55-67.
- Meyer-Baese, U. Digital Signal Processing with Field Programmable Gate Arrays / U. Meyer-Baese. - Springer-Verlag Berlin, Heidelbrg, 2004. - 527 p.
- Yeh, Y.-C. Improving the Sampling Resolution of Periodic Signals by using Controlled Sampling Interval Method / Y.-C. Yeh, Y. Chu, C.W. Chiou // Computers & Electrical Engineering. - 2014. - Vol. 40, no. 4. - P. 1064-1071.
- Discrete Model of Paired Relay-Race / E.V. Larkin, A.V. Bogomolov, A.N. Privalov, N.N. Dobrovolsky // Вестник ЮУрГУ. Серия «Математическое моделирование и программирование». -2018. - Т. 11, № 3. - С. 72-84.
- Ларкин, Е.В. Дискретный подход к моделированию синхронизированных эстафет / Е.В. Ларкин, А.Н. Привалов, А.В. Богомолов // Научно-техническая информация (НТИ). сер. 2. Информационные процессы и системы. - 2020. - № 2. - C. 17-26.
- Relay Races along a Pair of Selectable Routes / E.V. Larkin, A.V. Bogomolov, A.N. Privalov, N.N. Dobrovolsky // Bulletin of the South Ural State University. Series: Mathematical Modelling, Programming and Computer Software. - 2018. - Vol. 11, no. 1. - P. 15-26.
- Bielecki, T.R. Conditional Markov Chains: Properties, Construction and Structured Dependence / T.R. Bielecki, J. Jakubowski, M. Niew^glowski // Stochastic Processes and their Applications. - 2017. - Vol. 127, no. 4. - P. 1125-1170.
- Markov Chains: Models, Algorithms and Applications / W.K. Ching, X. Huang, M.K. Ng, T.K. Siu // International Series in Operations Research & Management Science. - Vol. 189. - Springer Science + Business Media NY, 2013. - 243 p.
- Janssen, J. Applied Semi-Markov Processes / J. Janssen, R. Manca. - Springer US, 2006. -310 p.
- Ang, K.H. PID Control System Analysis, Design and Technology / K.H. Ang, G. Chong, Y. Li // IEEE Transactions of control systems technology. - 2005. Vol. 13, no. 4. - P. 559-576.
- O'Dwier, A. PID Compensation of Time Delay Processes 1999-2002: a Survey / A. O'Dwier // Proc. 2003 American Control Conference. USA, Denver, Colorado. - 2003. - P. 1494-1499.
- Pavlov, A.V. About the Equality of the Transform of Laplace to the Transform of Fourier / A.V. Pavlov // Пробл. анал. Issues Anal. - 2016. - Т. 5(23), № 1. - P. 21-30.
- Li, J. Three Effective Inverse Laplace Transform Algorithms for Computing Time-Domain Electromagnetic Responses / J. Li, C.G. Farquharson, X. Hu // Geophysics. - 2015. - Vol. 81, Iss. 2. -P. 75-90.
