Математическое обеспечение мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов

Автор: Ларкин Евгений Васильевич, Солдатов Евгений Сергеевич, Богомолов Алексей Валерьевич
Рубрика: Математика
Статья в выпуске: 1 т.16, 2024 года.
Бесплатный доступ
Рассмотрены вопросы разработки математического обеспечения мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов, задачей которого является повышение безопасности и предотвращение потерь при хранении и транспортировке. Большое количество стационарных и транспортных систем хранения криопродуктов, эксплуатируемых на разнородных предприятиях, высокие требования по безопасности и скорости реакции системы на возникающие предаварийные ситуации обусловливают необходимость автоматизации процессов управления режимами хранения с применением технологий искусственного интеллекта. Представлена структура разработанной двухслойной нейронной сети мониторинга состояния и выбора режима хранения криогенных продуктов, включающей нейроны первого слоя, связанные с системой мониторинга, и нейроны второго слоя, выходы которых подключены к входам логических блоков выбора режима функционирования системы хранения. Предложены варианты обработки сигналов нейросети при помощи линейной фильтрации, а также с использованием фильтра, основанного на порядковых статистиках, применение которого целесообразно в условиях импульсных помех в каналах передачи данных от сенсоров к сети мониторинга. Приведено математическое описание процедуры, инициирующей запуск алгоритмов коррекции состояния объекта мониторинга. Разработанная схема может быть использована для широкого спектра стационарных и транспортных систем хранения, в том числе оборудованных холодильной машиной для реконденсации паров криопродуктов.
Хранение криогенных продуктов, мониторинг систем хранения, управление режимами эксплуатации, нейронная сеть, конституента единицы, мониторинг термодинамических процессов, сжиженный природный газ
Короткий адрес: https://sciup.org/147242629
IDR: 147242629 | УДК: 004.896 | DOI: 10.14529/mmph240103
Mathematical support for monitoring the status and control of operating modes of cryogenic storage systems
This article considers the development of mathematical support for monitoring and controlling operating modes of cryogenic storage systems which increases their safety and prevent losses during storage and transportation. A large number of stationary and transport cryogenic storage systems have strict requirements for safety and the speed of a system’s response to emerging pre-emergency situations which necessitate the automation of managing storage modes using artificial intelligence (AI). The structure of the two-layer neural network for monitoring the state and selecting the storage mode of cryogenic products is presented, including first-layer neurons associated with the monitoring system and second-layer neurons whose outputs are connected to the inputs of logical blocks for selecting the operating mode of the storage system. Options are proposed for processing neural network signals using linear filtering and using a filter based on order statistics - the use of which is advisable in conditions of impulse noise in data transmission channels from the sensors to the monitoring network. A mathematical description of the procedure which initiates the algorithms for correcting the state of the monitoring object is given. The scheme can be used for a wide range of stationary and transport storage systems, including those equipped with refrigeration for recondensing cryogenic vapors.
Текст научной статьи Математическое обеспечение мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов
Вопросы обеспечения безопасности и снижения потерь являются доминирующими при хранении и транспортировке опасных веществ, находящихся в процессе стационарного хранения или перевозки в сжиженном состоянии. Разработка методов прогнозирования состояния продукта и способов сокращения потерь особенно актуальна для оборудования, в котором хранятся криогенные продукты (жидкий кислород, жидкий азот, сжиженный природный газ и др.). В последнее время отмечен устойчивый рост мирового рынка различных систем хранения криогенных продуктов (далее систем хранения), что обусловлено, главным образом, стабильным ростом производства и потребления сжиженного природного газа (СПГ). Для мирового рынка СПГ характерна устойчивая положительная динамика: в частности, рост по итогам 2021 года составил 5,4 %. При этом к 2035 году среднегодовой темп роста рассматриваемого рынка может возрасти вдвое [1].
Несмотря на наличие публикаций по теме бездренажного хранения криогенных продуктов, в том числе результатов компьютерного моделирования процессов тепломассообмена в различных криогенных сосудах, практически отсутствуют исследования по системному применению полученных результатов для снижения потерь при хранении и транспортировке криогенных продуктов в масштабах промышленного кластера и страны в целом [2]. При этом важнейшей составляющей системного подхода к предотвращению потерь при хранении и транспортировке криогенных продуктов является организация дистанционного мониторинга тепломассообменных процессов в стационарных и транспортных системах хранения, подключенных к единой информационной системе. Речь идет как о вновь проектируемых системах хранения, так и об оборудовании, находящемся в эксплуатации, которое следует обеспечить современными техническими средствами мониторинга и управления [3, 4].
Диспетчеризация и принятие решений при работе с криогенным оборудованием осложнено расположением систем хранения на удаленных друг от друга разнородных предприятиях, часть из которых принадлежит промышленному производству, а остальные относятся ко многим другим отраслям экономики. Например, большое количество систем хранения жидкого кислорода расположено на территориях металлургических предприятий, а также на объектах здравоохранения. При этом такие же кислородные системы хранения часто применяются на заводах, использующих газовую сварку или резку металла, на объектах стекольного производства, на предприятиях, изготавливающих световое оборудование и пр., технический кислород в сжиженном состоянии хранится и используется на предприятиях военно-промышленного комплекса и на объектах космической инфраструктуры [5]. Аналогичная ситуация с расположением систем хранения на разнородных предприятиях характерна для СПГ и других криопродуктов. Также особого внимания требуют вопросы управления режимами эксплуатации систем хранения, оборудованных холодильной машиной для реконденсации паров криопродуктов [6].
Расположение объектов мониторинга на сильно удаленных друг от друга разнородных предприятиях, учитывая, помимо прочего, различный уровень квалификации и опыта обслуживающего персонала, обусловливает необходимость разработки математического обеспечения и технических средств для повышения эффективности мониторинга и коррекции режимов эксплуатации систем хранения. Приоритетным направлением решения этой задачи в настоящее время является применение технологий искусственного интеллекта [7–9].
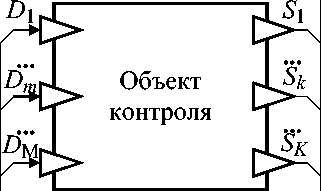
Функциональная схема рассматриваемой системы контроля режимов хранения криогенного продукта приведена на рис.
о к Сй
о
И О А ю о я я
E 1
Мониторинг окружающей среды
я я р о н я я о S
« к я к о н о о

Контроллер состояния
криопродукта
Рис. 1. Функциональная схема системы контроля состояния криопродукта
В состав системы входят собственно объект хранения и транспортировки, сенсорная подсистема, включающая датчики измерения состояния собственно объекта контроля (sensor) S 1 ,..., S k ,..., S K , датчики измерения параметров окружающей среды (environment) E 1 ,..., E j ,..., E J , средства воздействия на объект (drives) D 1 ,...,D m ,..., D M .
Объект контроля представляет систему сосудов, контролируемо сообщающихся между собой, а также с напорной и дренажной магистралью. Сосуды и магистрали снабжены контрольноизмерительными приборами и запорно-регулирующей арматурой. В состав датчиков измерения состояния S 1, ..., Sk , ..., SK собственно объекта контроля входят: датчики давления, температуры, уровней жидкой фазы внутри сосудов; концевые выключатели, идентифицирующие откры-тие/закрытие перепускных клапанов, а также клапанов, изолирующих сосуды от магистралей; датчики скоростей вращения валов, токи, напряжения, температуры электродвигателей приводов запорно-регулирующей аппаратуры, а также холодильной машины при ее наличии. При контроле параметров окружающей среды E 1, ..., Ej , ..., EJ в системе используются датчики температуры, влажности, давления, концентрации газа в рабочей зоне. Если сосуд, заполненный криопродуктом, размещен на подвижном носителе, то в состав E 1, ..., Ej , ..., EJ включаются датчики текущих линейных и угловых скоростей и ускорений носителя. Результат управления сводится к подаче управляющих воздействий D 1, ..., Dm , ..., DM на приводы перепускных, входных и выходных клапанов.
Большое количество контролируемых параметров от разных сосудов, высокие требования по безопасности и скорости реакции системы в целом на возникающие предаварийные ситуации предполагают интеллектуализацию процесса управления, например, за счет применения нейронной сети, обеспечивающей мониторинг состояния и установление режимов функционирования цифрового регулятора [10–12]. Структура нейронной сети приведена на рис. 2.
В нейронную сеть входят нейроны первого слоя V1 = (v1,1,..., v1a,..., v1, А), связанные с системой мониторинга, нейроны второго слоя v2 = (v i, —, v2 ^, —, v2 s), выходы которых подключены к входам логических блоков 21,...,Х^,..., 2 выбора режима функционирования системы хране- ния.
На вход нейронной сети поступает обобщенный вектор измеряемых параметров состояния X = ( Х^Х » ,—,Х а ) , (1)
где Xa g(En...,Ej,...,Ej,S1,...,Sk,...,Sк); X„ = [x1(a),...,xpaa),...,x^)] - кортеж из последова тельно поступивших на обработку дискретных значений сигналов E1, ..., Ej, ..., EJ,
S 1 ,..., Sk ,..., S K ; 1 < а ; A = J + K .
Кортежи Xa представляются в пространственно-временных дискретных координатах, если сенсор формирует цифровой образ наблюдаемой сцены, или в дискретном времени, если сигнал формируется сенсорами другими типов. Номер элемента x кортежа обозначен индекс функ цией в (а), где а - номер элемента Ха в векторе X. В случае линейной обработки, как это показано на рис. 2, выходные сигналы нейронной сети рассчитываются как свертка
В ( а )
x i ( а ) = ^ а в ( а ) x i ( а ) -в ( а ) , (2)
в ( а ) =1
где x^ g Х^ , 1 < а < А , Х^ - последовательность отсчетов, формируемая на выходе нейрона; [ a i(«),..., ap(а),..., a^ («) ] — дискретный импульсный отклик фильтра, подбираемый при настройке сети; В ( а ) - размер апертуры фильтра, равный длине соответствующего кортежа и в общем случае неодинаковый для различных величин Х а .
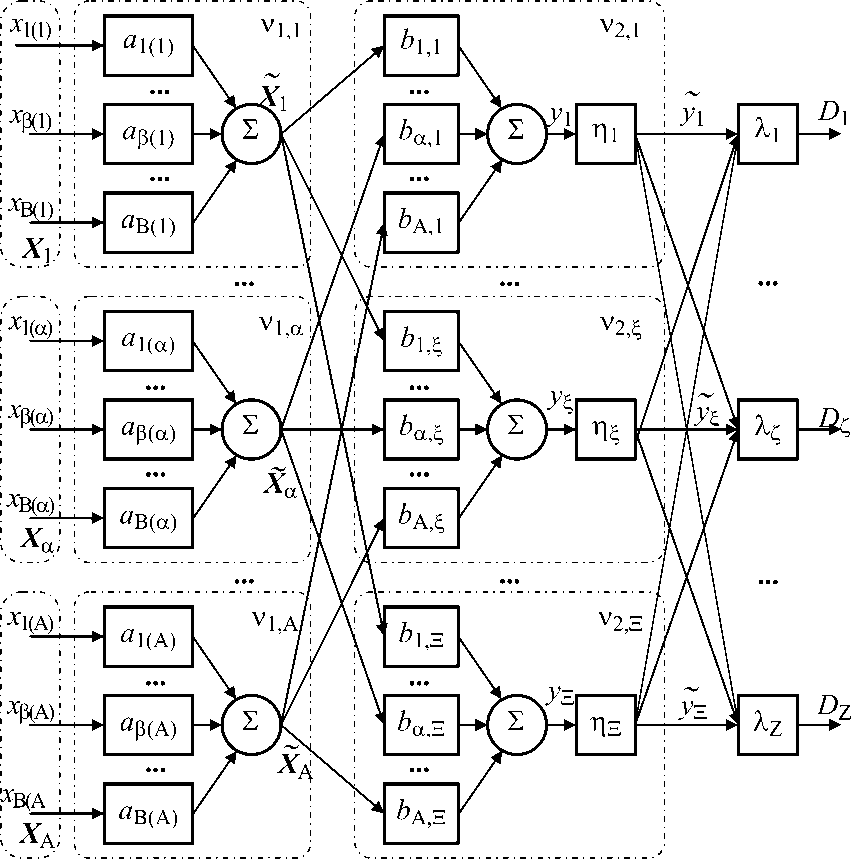
Рис. 2. Нейронная сеть мониторинга состояния и выбора режима хранения криогенных продуктов
Очевидно, что линейная фильтрация (2) не является единственно возможной для использования в нейронной сети. В ряде случаев, в частности в условиях импульсных помех в каналах передачи данных от сенсоров к сети мониторинга состояния и выбора режима хранения криогенных продуктов целесообразно применение фильтра, основанного на порядковых статистиках [13, 14]. В подобных фильтрах кортеж X a , упорядоченный по последовательности поступления величин х(^ ,..., х ^^,..., хв(^ на обработку, переупорядочивается по возрастанию указанных величин, т. е.
Xa ^ Xa,inc = ^x1(a,inc), xe(a,inc),xB(a,inc)] , где xe(a),inc G Xa , 1(a) ^ ^(«^ ^ B(a) i x1(a),inc ^ ™ ^ xe(a),inc " - " XB(a),inc •
Далее из кортежа Xa,inc выбирается элемент х^а^ с заданным номером. в(а,inc), который включается в кортеж Ха выходных величин слоя V1. В случае, если в (a, inc) = 1, то в процессе фильтрации выбирается наименьший элемент. В случае, если в (a, inc ) = B(a), то в процессе фильтрации всегда выбирается наибольший элемент. В случае если число B(a) является нечетным и при фильтрации выбирается элемент с номером e(a,inc)=[B(a)- 1]/2+1, то фильтр является медианным. При настройке нейронной В(а) и номер в(а,тс) выбираемого элемента.
На выходе подсети ν1 первого слоя формируется вектор кортежей X = ( X 1 ,...,X a , ...,Х А ) в А -мерном пространстве оценок состояния системы хранения криогенных продуктов (рис. 3).
Привязка кортежей к единому дискретному времени, например к моменту в, позволяет сформировать вектор X (в) = [Х1 (в) ,-, Ха ( в),-.-, Ха( в) ,.•., ] текущих оценок состояния системы. Нейроны v2,1,..., v2,t,..., v2,H второго слоя формируют в рассматриваемом пространстве систему гиперплоскостей сети определяются размер апертуры
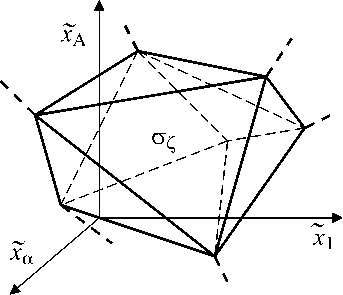
Рис. 3. Пространство оценок состояния системы хранения криогенных продуктов
b • x + c = 0,
~ ~ ~ ~ \ 0 , а где x = (Х1,...,ха,...,xА) - координаты пространства оценок состояния; b - нхА матрица ко- эффициентов; c = (c1,..., Ct,..., сн ) - н-мерный вектор-столбец свободных членов; 0 - нулевой н- мерный вектор-столбец; 0 - знак транспонирования;
b =
|
b 1,1 . |
.. Ь а ,1 . |
.. b А,1 |
|
b 1, t . |
.. b at . |
.. b A, t |
|
b 1,H . |
.. Ь ан . |
.. b А,Н |
.
Подстановка в (3) вектора X ( в ) текущих оценок позволяет определить его местоположение у ( в ) в пространстве относительно сформированной системы гиперплоскостей:
b • x (e) + c = У (в),
где у ( в ) = [ У 1 ( в ) ,.•., Уе, ( в ) ,—, У н ( в ) ] — вектор оценок местоположения вектора X ( в ) в пространстве оценок состояния.
Основной задачей нейронной сети является отнесение текущего состояния объекта контроля к одному из определенных классов и генерация последовательности действий в том случае, если класс, к которому отнесено состояние, не соответствует ожидаемому. Поэтому с помощью блоков П 1 ,—, П е , —, П н вектор координат у ( в ) преобразуется в вектор логических переменных у ( в ) = [ У 1 ( в ) ,..., y t ( в ) ,..., У н ( в ) ] ° следующим образом:
yt(в) =
1, when y t ( e ) > 0;
0 otherwise .
Физически логическая единица в (5) означает, что составляющая y t ( в ) вектора у ( в ) находится над плоскостью X = b 1 t X 1 ,..., b a t X,..., b A t а + C t = 0, а логический ноль - под ней.
Области а х,..., az ,..., ^z , в которые должен попадать вектор X ( в ) текущих оценок состояния, с использованием логических переменных y t ( в ) могут быть представлены в виде дизъюнктивных нормальных форм:
н
DZ = V Д ^z,t,i( yt)
, 1 i где ^ SzЛ,i (y^ ) - i-я конституента единицы Z-й нормальной формы; Sz Л i (У Л) — логическая функция переменной у^ при ее вхождении в i-ю конституенту, определяющую соответствую щую часть ^-й области. Справедливо следующее утверждение. Любая конституента задает выпуклый политоп в пространстве оценок состояния Х1 ,..., Ха,..., ХА. Под выпуклостью политопа понимается то его свойство, что между любой парой точек, расположенных в его внутренней области, можно провести отрезок прямой без пересече ния с его внешними гранями. Доказательство. Свойство достаточно просто доказывается методом математической индукции. Очевидно, что политопом, не имеющим внешних граней вообще, является неограниченное гиперпространство Х1,..., Ха,..., ХА, в котором между любыми двумя точками с координатами Х1 1,..., Ха 1,..., ХА 1 и Х1 2,..., Ха 2,..., ХА 2 может быть размещен отрезок прямой, не пересекающийся с гранями, которые в данном случае отсутствуют. Рассечем гиперпространство любой гиперплоскостью. Очевидно, что все отрезки, начинающиеся в точках, принадлежащих этой гипер- плоскости, и имеющие продолжение по одну или по другую сторону от нее, не имеют других точек пересечения с ней, если эти отрезки не лежат на самой гиперплоскости. Другие отрезки, начальные и конечные точки которых лежат по одну сторону от рассекающей гиперплоскости, также ее не пересекают. Поэтому в этом случае обе части гиперпространства, которые могут рассматриваться как два непересекающихся политопа с единственной общей гранью, также являют- ся выпуклыми. Предположим, что после рассечения (к-1)-й гиперплоскостью гиперпространство Х1,..., Ха,..., ХА представляет собой объединение непересекающихся выпуклых политопов. Рассечем это пространство к-й гиперплоскостью и предположим, что сформированный предыдущими рассечениями l (к -1) -й выпуклый политоп рассекается на l (к -1) -й и l (к -1)+ -й полито- пы. Очевидно, что все отрезки, начинающиеся в точках, лежащих внутри l (к -1) -го политопа и оканчивающиеся внутри l (к -1) — -го политопа, не имеют других точек пересечения с к-й ги- перплоскостью, кроме начальной, если эти отрезки не лежат на самой гиперплоскости. Другие отрезки, начальные и конечные точки которых лежат по одну сторону от рассекающей гиперплоскости, также ее не пересекают. Аналогичные рассуждения могут быть проведены и для l (к -1)+ -го политопа. Таким образом, для базы индукции утверждение выполняется, и из предположения, что оно выполняется для (к-1)-го шага индукции, доказано, что оно выполняется на к-м шаге тоже. С учетом того, что l (к -1) -й политоп, сформированный на (к-1)-м шаге, был выбран произвольно, ут- верждение можно считать доказанным. Отметим, что выпуклые политопы, описание которых представлено в виде конституент единицы, входящих в дизъюнктивные нормальные формы (6), покрывают все гиперпространство Х1,..., Ха,..., ХА. В общем случае каждая дизъюнктивная нормальная форма может описывать как выпуклый, так и невыпуклый многогранник о^,..., ^z,..., <rz, причем эти многогранники могут пересекаться между собой, если, например в групповые дизъюнкции входят одни и те же консти-туенты единицы. Попадание вектора оценок X (в) в область а^, идентифицируемое по равенству единице Dz, означает запуск Z-го алгоритма коррекции состояния объекта, который может включать выполнение следующих действий: - открытие/закрытие дренажных клапанов; - открытие/закрытие перепускных клапанов; – коррекция скорости и направления движения транспортного средства с цистерной; – запуск/остановка двигателя холодильной машины; – коррекция режима работы холодильной машины; – продолжение мониторинга без выполнения действий. Таким образом, использование предложенного математического обеспечения, реализованного на основе нейронной сети, повышает эффективность производственных процессов за счет автоматизации и интеллектуализации мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов. Предложенная схема потенциально эффективна для широкого спектра стационарных и транспортных систем хранения, в том числе оборудованных холодильной машиной для реконденсации паров криопродуктов. Исследование выполнено при финансовой поддержке гранта правительства Тульской области в области науки и техники в 2023 г. (договор ДС/116 от 27.09.2023 г.) 1. Исмагилова, В.С. Транспортировка трубопроводного и сжиженного природного газа: сравнительный анализ достоинств и недостатков / В.С. Исмагилова, Т.В. Чекушина // Науки о Земле и недропользование. – 2023. – Т. 46, № 1 (82). – С. 61–71. 2. Солдатов, Е.С. Программное обеспечение моделирования и мониторинга процессов в резервуарах и цистернах при длительном хранении криогенных продуктов // Известия Тульского государственного университета. Технические науки. – 2019. – № 10. – С. 385–393. 3. Larkin, E. Discrete Model of Mobile Robot Assemble Fault-Tolerance / E. Larkin, A. Bogomolov, A. Privalov // Lecture Notes in Computer Science. – 2019. – Vol. 11659 LNAI. – P. 204–215. 4. Инерциально-спутниковая навигационная система управления транспортными средствами / В.Г. Макаренко, А.А. Подорожняк, С.В. Рудаков, А.В. Богомолов // Проблемы управления. – 2007. – Вып. 1. – С. 64–71. 5. Архаров, И.А. О необходимости возрождения криогенного машиностроения в России / И.А. Архаров // Вестник Международной академии холода. – 2023. – № 1. – С. 6–9. 6. Soldatov, E. Issues of Energy-Efficient Storage of Fuel in Multimodal Transport Units / E. Soldatov, A. Bogomolov // Smart Innovation, Systems and Technologies. – 2022. – Vol. 232. – P. 393– 402. 7. Епихин, А.И. Мониторинг и прогнозирование расхода топлива судами с помощью нейронных сетей / А.И Епихин, М.И. Фадеев, И.Ю. Васаган // Эксплуатация морского транспорта. – 2023. – № 2 (107). – С. 104–107. 8. Голосовский, М.С. Алгоритм настройки систем нечёткого логического вывода на основе статистических данных / М.С. Голосовский, А.В. Богомолов, Д.С. Тобин // Научно-техническая информация. Серия 2: Информационные процессы и системы. – 2023. – № 1. – С. 1–9. 9. Nowak G. Using the Artificial Neural Network to Control the Steam Turbine Heating Process / G. Nowak, A. Rusin // Applied Thermal Engineering. – 2016. – Vol. 108. – P. 204–210. 10. Digital Control of Continuous Production with Dry Friction at Actuators / E. Larkin, A. Bogomolov, T. Akimenko, A. Privalov // Smart Innovation, Systems and Technologies. – 2022. – Vol. 232. – P. 427–436. 11. Large Scale Model Predictive Control with Neural Networks and Primal Active Sets / S.W. Chen, T. Wang, N. Atanasov et al. // Automatica. – 2022. – Vol. 135. – P. 109947. 12. Технология построения инерциально-спутниковой навигационной системы управления транспортными средствами с нейросетевой оптимизацией состава вектора измерений / В.Г. Макаренко, А.В. Богомолов, С.В. Рудаков, А.А. Подорожняк // Мехатроника, автоматизация, управление. – 2007. – № 1. – С. 39–44. 13. Sutton R.S. Reinforcement Learning, second edition: An Introduction / R.S. Sutton, A.G. Barto. – MIT Press, 2018. – 552 p. 14. Application of Artificial Neural Networks in Condition Based Predictive Maintenance / J. Krenek, K. Kuca, P. Blazek, O. Krejcar, D. Jun // Recent Developments in Intelligent Information and Database Systems. Studies in Computational Intelligence book series (SCI, Vol. 642). – 2016. – P. 75–86. Поступила в редакцию 13 января 2024 г. MATHEMATICAL SUPPORT FOR MONITORING THE STATUS AND CONTROL OF OPERATING MODES OF CRYOGENIC STORAGE SYSTEMS E.V. Larkin1, E.S. Soldatov2, A.V. Bogomolov3 1 Tula State University, Tula, Russian Federation E-mail: elarkin@mail.ru 2 Research and Production Enterprise “Topaz”, Moscow, Russian Federation
Список литературы Математическое обеспечение мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов
- Исмагилова, В.С. Транспортировка трубопроводного и сжиженного природного газа: сравнительный анализ достоинств и недостатков / В.С. Исмагилова, Т.В. Чекушина // Науки о Земле и недропользование. – 2023. – Т. 46, № 1 (82). – С. 61–71.
- Солдатов, Е.С. Программное обеспечение моделирования и мониторинга процессов в резервуарах и цистернах при длительном хранении криогенных продуктов // Известия Тульского государственного университета. Технические науки. – 2019. – № 10. – С. 385–393.
- Larkin, E. Discrete Model of Mobile Robot Assemble Fault-Tolerance / E. Larkin, A. Bogomolov, A. Privalov // Lecture Notes in Computer Science. – 2019. – Vol. 11659 LNAI. – P. 204–215.
- Инерциально-спутниковая навигационная система управления транспортными средствами / В.Г. Макаренко, А.А. Подорожняк, С.В. Рудаков, А.В. Богомолов // Проблемы управления. – 2007. – Вып. 1. – С. 64–71.
- Архаров, И.А. О необходимости возрождения криогенного машиностроения в России / И.А. Архаров // Вестник Международной академии холода. – 2023. – № 1. – С. 6–9.
- Soldatov, E. Issues of Energy-Efficient Storage of Fuel in Multimodal Transport Units / E. Soldatov, A. Bogomolov // Smart Innovation, Systems and Technologies. – 2022. – Vol. 232. – P. 393–402.
- Епихин, А.И. Мониторинг и прогнозирование расхода топлива судами с помощью нейронных сетей / А.И Епихин, М.И. Фадеев, И.Ю. Васаган // Эксплуатация морского транспорта. – 2023. – № 2 (107). – С. 104–107.
- Голосовский, М.С. Алгоритм настройки систем нечёткого логического вывода на основе статистических данных / М.С. Голосовский, А.В. Богомолов, Д.С. Тобин // Научно-техническая информация. Серия 2: Информационные процессы и системы. – 2023. – № 1. – С. 1–9.
- Nowak G. Using the Artificial Neural Network to Control the Steam Turbine Heating Process / G. Nowak, A. Rusin // Applied Thermal Engineering. – 2016. – Vol. 108. – P. 204–210.
- Digital Control of Continuous Production with Dry Friction at Actuators / E. Larkin, A. Bogomolov, T. Akimenko, A. Privalov // Smart Innovation, Systems and Technologies. – 2022. – Vol. 232. – P. 427–436.
- Large Scale Model Predictive Control with Neural Networks and Primal Active Sets / S.W. Chen, T. Wang, N. Atanasov et al. // Automatica. – 2022. – Vol. 135. – P. 109947.
- Технология построения инерциально-спутниковой навигационной системы управления транспортными средствами с нейросетевой оптимизацией состава вектора измерений / В.Г. Макаренко, А.В. Богомолов, С.В. Рудаков, А.А. Подорожняк // Мехатроника, автоматизация, управление. – 2007. – № 1. – С. 39–44.
- Sutton R.S. Reinforcement Learning, second edition: An Introduction / R.S. Sutton, A.G. Barto. – MIT Press, 2018. – 552 p.
- Application of Artificial Neural Networks in Condition Based Predictive Maintenance / J. Krenek, K. Kuca, P. Blazek, O. Krejcar, D. Jun // Recent Developments in Intelligent Information and Database Systems. Studies in Computational Intelligence book series (SCI, Vol. 642). – 2016. – P. 75–86.
