Математическое обеспечение мониторинга выбросов загрязняющих веществ от автотранспорта в зоне регулируемого пересечения на основе нейросетевых алгоритмов

Автор: Шепелв В.Д., Глушков А.И., Левашев А.Г.
Рубрика: Математика
Статья в выпуске: 4 т.16, 2024 года.
Бесплатный доступ
В современных городах вопросы экологии, связанные с автотранспортом, занимают всё более важное место в системе управления городскими транспортными потоками. Наибольшее количество выхлопных газов транспортные средства выделяют при резком изменении режимов движения, которое характерно для регулируемых перекрестков. Заторные ситуации также чаще формируются на перекрестках, когда большое скопление транспорта формирует неблагоприятный экологический фон. Для получения оперативной информации о параметрах интенсивности транспортных потоков применены нейросетевые алгоритмы распознавания транспортных средств из видеопотоков, полученных со стационарных уличных камер наблюдения на городских перекрёстках. Оптимизированный алгоритм работы обученной нейронной сети (YOLOv4) позволяет извлекать и интерпретировать данные о параметрах транспортных потоков в режиме реального времени. В рамках исследования разработаны математические модели, позволившие реализовать мониторинг в режиме реального времени количества и концентрации загрязняющих веществ от автотранспорта в зоне регулируемого пересечения. Расчет количества выделяемых загрязняющих веществ в атмосферу от транспорта реализован с учетом средней скорости, типа транспортного средства и времени простоя в зоне измерения. Предложенная модель с поддержкой данных на основе непрерывного отслеживания и анализа состояния транспортных потоков может служить основой для прогнозирования уровней сложности заторов и оценки экологических рисков.
Выбросы загрязняющих веществ, транспортный поток, нейронная сеть, машинное обучение, математическая модель, концентрация выбросов, мониторинг экологических рисков
Короткий адрес: https://sciup.org/147246009
IDR: 147246009 | УДК: 656.13.01:502.3 | DOI: 10.14529/mmph240410
Mathematical support for monitoring pollutant emissions from vehicles in the regulated intersection area based on neural network algorithms
In modern cities, environmental issues related to motor transport occupy an increasingly important place in the management system of urban transport flows. Vehicles emit the greatest amount of exhaust gases during sudden changes in traffic modes, which is typical of signalized intersections. Traffic congestion situations also occur more often at intersections, when a large concentration of traffic creates an unfavorable environmental background. To obtain operational information about the parameters of the intensity of traffic flows, the authors used neural network algorithms for recognizing vehicles from video streams received from stationary street surveillance cameras at city intersections. An optimized algorithm for the operation of a trained neural network (YOLOv4) allows for extracting and interpreting data on traffic flow parameters in real time. As part of the study, the developed mathematical models made it possible to implement real-time monitoring of the amount and concentration of pollutants from vehicles in the controlled intersection zone. The calculation of the amount of pollutants released into the atmosphere from transport is carried out taking into account the average speed, type of vehicle and idle time in the measurement area. An appropriate software system can serve as a basis for predicting the difficulty levels and environmental risks of various atypical traffic situations.
Текст научной статьи Математическое обеспечение мониторинга выбросов загрязняющих веществ от автотранспорта в зоне регулируемого пересечения на основе нейросетевых алгоритмов
Проблема ухудшения качества воздуха уже давно беспокоит общественность современных городов. Существенную долю вреда, несомненно, вносит транспорт, без которого не представляется существование современного общества. Даже изобретение новых видов топлива и использование электроавтомобилей не оказывает быстрого значительного эффекта [1–2]. Так, исследователи на основании данных 929 городов США, используя имитационное моделирование, спрогнозировали сокращение выбросов парниковых газов до 34 % к 2050 году [1]. Темпы роста количества электроавтомобилей в России значительно ниже, чем в США и европейских странах, поэтому более эффективными мерами по снижению экологической нагрузки являются управленческие решения по регулированию дорожного движения. Многочисленные исследования доказали вред, наносимый здоровью людей в виде различных заболеваний, распространенных во всех возрастных группах: сердечно-сосудистые, респираторные, рак. Выбросы от транспорта образуются от полного и неполного сгорания топлива, масла, смазки и состоят из сложных частиц и газов, большинство которых очень токсичны (оксиды углерода, азота и углеводорода, сажа). Частицы от истирания шин, тормозов – РМ10 и РМ2,5 – также представляют серьезную угрозу здоровью людей [3]. Возникновение ДТП, деформация дорожного полотна и другие причины сопровождаются резким падением пропускной способности и являются частыми причинами заторов, кото- рые сопровождаются значительным ростом выбросов от автотранспорта [4]. Мониторинг состояния дорожно-транспортных потоков и оценка выбросов в режиме реального времени приобретает все более важное значение с целью обеспечения безопасной и эффективной дорожной среды.
Регулируемые перекрестки, где происходит резкая смена режимов движения (остановка, холостой ход, разгон) транспортных средств (ТС) и формируются заторные ситуации, являются самыми «горячими» точками [5]. Авторы в исследовании [6] изучали влияние интенсивности движения и расстояние между перекрестками на уровень выбросов загрязняющих веществ (ЗВ). Уровень выбросов зависит от множества факторов: от интенсивности движения [7], вероятности возникновения заторов различной глубины [8, 9], метеорологических условий [10], типов транспортных средств и их возраста [11], а также и от сезона года [12].
В исследовании [13] представлено моделирование качества воздуха на основе модели Гаусса и микроскопической модели дорожного движения. Разработка моделей, основанных на распределении Гаусса, часто используется исследователями при моделировании дисперсии вредных веществ из-за возможности выполнения расчетов от большого количества источников [14].
Многие предложенные модели основаны на средних показателях интенсивности движения и средних скоростях движения в определенный промежуток времени, что существенно отражается на полученной оценке количества выбросов. Широкое внедрение камер наружного наблюдения, которые используются в целях контроля соблюдения правил движения, нашло применение и в сфере сбора данных о транспортных потоках [15]. Применение глубокого обучения нейронных сетей позволяет не только собрать данные о количестве ТС, но и получить количественную оценку структуры потока по типам автомобилей.
Многовариантность и непредсказуемость дорожных ситуаций в городской транспортной сети обуславливает необходимость разработки качественных математических моделей расчета количества и концентрации ЗВ от автотранспорта на регулируемых пересечениях. Приоритетным направлением решения этой задачи в настоящее время является применение нейросетевых технологий распознавания, работающих в режиме реального времени, типов ТС с определением скоростей на каждом отрезке их траектории движения. Основой соответствующего математического обеспечения должны выступать официальные методики расчёта, утвержденные Приказом Министерства природных ресурсов и экологии РФ [16].
Разработка нейросетевых алгоритмов обработки видеопотока
С целью сбора данных о параметрах движения транспортных потоков разработана автономная система слежения на основе нейронных сетей. Данная система обеспечивает детектирование местонахождения, траектории, количества и скорости перемещения автотранспорта. Архитектура нейронной сети в нашей работе составлена из модулей обнаружения, отслеживания и вычисления различных показателей.
Для сбора данных использованы уличные системы видеонаблюдения с различной удаленностью от дороги и высотой монтажа. Данные системы оснащены видеокамерами с фиксированной частотой кадров, различным разрешением и разрешающей способностью [17].
С целью обнаружения, классификации и отслеживания траектории транспортных средств были протестированы наиболее приспособленные для этих задач нейронные сети: RetinaNet, YOLOv4 и SSD и другие.
Основным достоинством YOLOv4 является ее высокая производительность и скорость работы при сохранении точности детектирования. Этот алгоритм демонстрирует отличные результаты в задачах обнаружения транспортных средств в реальном времени, что критически важно для наших целей мониторинга дорожного движения. Были также рассмотрены новейшие версии YOLO [18], однако их преимущества в точности не перевешивают значительное снижение скорости работы, что является критичным фактором для нашей системы.
На основе требований к производительности аппаратного оборудования для обработки видеопотоков в динамическом режиме наибольшую производительность и точность показала YOLOv4. При тестировании нейронная сеть обеспечила достаточную точность в распознавании и классификации объектов, при этом скорость обработки изображений (608×608) составила 19 кадров в секунду.
Проблема множественного отслеживания объектов была решена с помощью трекера SORT с открытым исходным кодом [19]. Венгерский алгоритм используется для обнаружения и оптимального сопоставления предсказанных объектов. Таким образом, нейронная сеть YOLOv4 и трекер SORT обеспечивают покадровый сбор данных в непрерывном режиме о местоположении объектов, что позволяет рассчитывать их скорость и точное расстояние между ними.
Для обучения нейронной сети была проведена аугментация 57000 обработанных изображений, что позволило увеличить библиотеку исходных данных (ДАТА СЕТ) до 900 000 единиц. Такой подход позволил достичь высокой точности распознавания и отслеживания траектории и скорости перемещения объектов в пределах 92–96 %. Сбор данных с применением обзорных камер позволил отслеживать траекторию движения и индивидуальные динамические параметры ТС продолжительное время и на больших участках дорожной сети.
Анализ транспортных потоков на примере городского перекрёстка
Анализ результатов мониторинга транспортных потоков позволяет проводить различные аналитические исследования. Рассмотрим динамику суммарной мощности транспортных потоков на указанном городском перекрёстке с преобладающим западно-восточным направлением движения. Результаты анализа за четыре недели августа 2023 года представлены на рис. 1, где отражены средненедельные почасовые потоки транспортных средств в рабочие и выходные дни недели как в западном и восточном направлениях, так и суммарный почасовой поток.
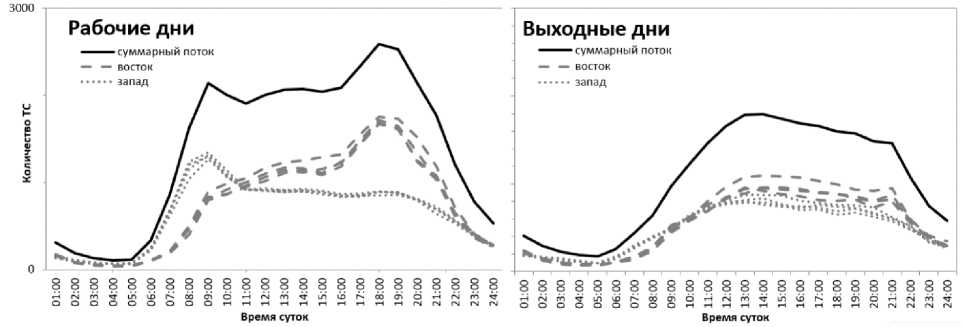
Рис. 1. Средние значения транспортных потоков в течение суток за рабочие дни недели
Здесь просматривается высокая стабильность недельных мощностей транспортных потоков со среднеквадратичным отклонением в пределах 3,5 % (коэффициент вариации). А также существенно то, что нет подобия суточной нагрузки автотранспорта в рабочие и выходные дни, это подтверждается очень слабым коэффициентом корреляции ( r = 0,05), лежащим за порогом статистической достоверности. Это также подтверждается параметрическими методами оценки различий, дающих оценку уровня статистической значимости ниже 0,01 %.
Модели расчёта количества и концентраций выбросов загрязняющих веществ
-
1. Математическая модель расчёта количества выбросов
-
2. Математическая модель расчёта концентраций выбросов
Количество выбросов от транспортных средств определяют динамические параметры транспортных средств и структура их потоков. Международным эталонным решением по оценке выбросов от автотранспорта является европейская модель инвентаризации выбросов автомобильного транспорта (COPERT) и датская оперативная модель загрязнения улиц (OSPM) [20]. Эти модели описывают условия рассеивания на небольшом количестве эмпирических данных, собранных вручную. Очевидно, что корректные данные о количестве и концентрации ЗВ на текущий момент могут быть получены на основе данных, собранных в режиме реального времени.
Для определения количества выбросов от транспортных средств на городских магистралях взяты за основу регламентированные для РФ методы расчёта выбросов загрязняющих веществ (далее – Методы) [16]. В соответствии с описанными в них алгоритмами раздельно нормируются выбросы для различных видов ЗВ как от транспортных средств, стоящих перед запрещающим сигналом светофора M пi,k , так и от движущихся с постоянной скоростью Mli,k . Следует отметить, что стандартизированные расчёты предполагают ряд упрощающих допущений: количество стоящих автомобилей определяется на момент окончания запрещающего движение сигнала светофора, а для движущихся автомобилей расчёты ведутся по их средней скорости проезда зоны перекрёстка.
В общем случае получения от нейронной сети параметров движения для каждого автомобиля возможен более точный расчёт суммарных выбросов ЗВ. Так, количество выбросов i -го загрязняющего вещества M i за общепринятый в расчётах интервал времени 20 мин может быть рассчитан по формуле
M i = 1 Z ( M ni,k 1 G " , k ( ' .k ) + 1 2 M ik‘ X G'■ ‘ (VҺ , ‘ j ( I ) d> ),
где С - количество циклов светофора за 20-минутный период времени; Mni к - удельный выброс i -го загрязняющего вещества автомобилями к -го типа, находящимися в очереди у запрещающего движение сигнала светофора; Gn к - количество автомобилей к -го типа, находящихся в очереди в районе перекрестка; tnк - время ожидания в очереди для каждого автомобиля к -го типа; l - длина зоны перекрёстка; M 'i‘ - удельный пробеговый выброс i -го загрязняющего вещества автомобилями к -го типа; G '‘ - количество автомобилей к -го типа, проезжающих перекрёсток с произвольной скоростью Vl ( t ); t '‘ - время пересечения зоны перекрёстка каждым автомобилем к -го типа; Гу ( t ) - поправочный коэффициент, определяемый текущей скоростью Vl ( t ) движения автомобиля.
Концептуальный подход моделирования предполагает разбиение площади облака концентраций для перекрёстка на ряд одинаковых квадратов, для каждого из которых будет рассчитываться концентрация ЗВ от всего транспортного потока на перекрёстке в текущую дискрету времени tk . В пределах одного квадрата концентрацию ЗВ будем считать постоянной.
Итак, согласно регламентирующим Методам, приземная концентрация ЗВ в фиксированной точке местности C ( x m ,y m ) при наличии группы источников выбросов определяется как сумма концентраций данного вещества от отдельных источников выброса при заданных направлении и скорости ветра.
Концептуальная модель предполагает представление всей площади проезжей части перекрёстка в виде множества N малых площадных источников C Si , каждый из которых включает в себя все автомобили, находящиеся на данной площади в текущую дискрету расчётного времени tk . В этом случае концентрация для каждого m -го квадрата сетки Ctk ( xm, ym ) облака концентраций ЗВ в течение дискреты tk имеет следующий вид:
N
С‘ ( Хт ,У т ) = 1 CtS ( x m -£ ,У т - П і ) , (2)
i=1
где ( xm,ym ) - точка центра m -го квадрата сетки облака концентраций ЗВ; ( ^ i ,n i ) - точка центра i -го площадного источника Si ( ^ ,ni ) выбросов ЗВ проезжей части перекрёстка.
В формуле (2) отражён концептуальный алгоритм решения задачи - дискретно обновляемый, с периодичностью tk , мониторинг по m квадратам сетки облака рассеивания концентраций ЗВ от N площадных источников выбросов, составляющих всю проезжую часть перекрёстка.
Рассмотрим логическую цепь построения модели расчёта концентрации Ctk ( xm,ym ) при разбиении проезжей части перекрёстка на множество площадных источников.
1-й ШАГ. В общем случае концентрация CS ( xm,ym ) загрязняющих веществ от источника, выбрасывающего ЗВ в атмосферный воздух с установленной ограниченной поверхности (вся проезжая часть перекрёстка), занимающего область площадью Sn , рассчитывается согласно Методам по формуле
CS ( x m , y m ) = 7 jj C ( x m - ^ i , y m - H i) d^dH , (3)
S где C(xm -$,ym -ni) — концентрация ЗВ, создаваемая в расчетной точке (xm,ym ) точечным ис точником выброса, находящимся в точке ($,ni) области S, а интеграл в формуле вычисляется по этой области.
2-й ШАГ . Но так как нейронная сеть позволяет отслеживать траекторию движения каждого автомобиля в области перекрёстка, то в расчётах заменим единый площадной источник ЗВ проезжей части перекрёстка на совокупность линейных источников, соответствующих траектории движения каждого автомобиля. Так, в частном случае одного линейного источника выброса, расположенного на подстилающей поверхности, концентрация ЗВ Сl рассчитывается по следующей формуле:
C l ( x m , У т , z m ) = 71 J C ( x m - & У т - H i , z m ) dl , (4)
3-й ШАГ . Далее в регламентирующих Методах для одного движущегося автомобиля применяется модификация формулы (4) – если линейным источником выброса аппроксимируются выбросы от точечного источника (одного автомобиля) мощности M(t) , который за время осреднения перемещается с положительной скоростью v ( t ), вдоль отрезка L , то концентрация Сl ЗВ вычисляется по формуле
Для множества K автомобилей, движущихся по своим траекториям L k по проезжей части всего перекрёстка, формула (5) добавляется суммой по всему количеству автомобилей:
К ( M,.1)
CS (xm,ym ) = Ё J---d С'1 С(xm -£,ym - Пі ) • k=1 V vk (lk )
4-й ШАГ . Итак, разбиваем множество линейных источников выбросов, соответствующих всем движущимся по перекрёстку автомобилям, на N площадных источников, каждый из которых в текущую дискрету времени t k определяет суммарные выбросы ЗВ от всех находящихся на данной площади S i автомобилей. В этом случае расчёт концентраций ЗВ в m -ом квадрате сетки облака рассеивания в дискрету времени t k преобразуется к виду:
N (К ( ^^
Ct (Xm,ym ) = Ё Ё J ЦуЛ) dl С (Xm - $ У - Пі) .(7)
i=i v k=i V vk(lk) )
С учётом того, что интеграл вычисляется за дискрету времени tk , для всех K движущихся за время tk автомобилей по i -му площадному источнику получаем следующее уравнение для суммарной мощности M tk выброса ЗВ от i -го площадного источника:
KK
M*= ZfM(4dl = Z(M^k).(8)
k=i V vk(lk)
В этом случае итоговая формула (7) преобразуется к конечному виду:
N
Ct (Xm , ym ) = Ё( Mik • С i (Xm - 6, ym - Пі)) •(9)
i = 1
Ввиду малого значения t k можно перейти к среднему значению скоростей Vl . Тогда получаем значительно более простую формулу для расчётов суммарной мощности в дискретном варианте:
M ik = X k [( M ni , k 1 G " ’ k t n , k )+( Mn, k T G ' k V Mu ))
Для практического применения расчётной модели в соответствии с формулой (9) необходимо проявить ещё математическую модель расчёта концентрации Ci в точке ( x m ,y m ) от площадного источника выброса ЗВ единичной мощности, располагающегося в точке ( G^n ) .
Модель расчёта мощности выбросов ЗВ для одного источника
Все необходимые математические формулы для этой алгоритмической модели по шагам представлены в соответствующих главах регламентирующих Методов и представляют собой набор кусочно-полиномиальных аппроксимаций для проведения быстрых компьютерных расчётов. Основой же получения этих аппроксимаций служат уравнения атмосферной диффузии, а также формулы Гауссовского распределения концентраций С xy (рассмотрены в трудах М.Е. Берлянда) от источника, расположенного в начале координат:
. 2 А
Cxy
1 I
' 2Пг
x
.(2').
'y У2П
—y" 1.(2'2)
,
к
к
где σx , σy – дисперсии распределения загрязняющих веществ по направлениям х и y, которые при средней скорости ветра u и некоторых коэффициентах вычисляются как
1 2 / ~л2— n
.
'x = “ci (ut)
Представленные в регламентирующих Методах упрощающие аппроксимации, адаптированные к задаче компьютерного мониторинга выбросов ЗВ, предполагают следующие упорядоченные процедуры для расчёта концентрации ЗВ в произвольной точке от постоянно действующего точечного источника выбросов:
1-й шаг – расчёт максимальной приземной концентрации С m , опасной скорости ветра U m расстояния Хm, на котором концентрация имеет максимальное значение С m ;
2-й шаг – коррекция расчётов при произвольной скорости ветра U :
Cm.U=r
U U m )
Cm ; Xm.U = p
UI
Um j
X m ;
3-й шаг – расчёт концентрации ЗВ вдоль оси Х факела выбросов:
C x = S 1
Cm U ;
m U 7
4-й шаг – расчёт концентрации ЗВ по нормали Y к оси факела Х выбросов:
C y = s 2
C .
m .U 7
В конечном итоге концентрация в произвольной точке ( xm,ym ) облака рассеивания от источника единичной мощности в точке ( сі,ці ) определяется по многошаговой процедуре:
C ( x m ^ i , y m
—
7 и I Пі ) = Cmr —
к Um 7
s 1
( ^
к X mi.и 7
s 2
к Xml-U 7
.
Графические представления для С ( xm — g i ,ym — n i ) - облака рассеивания концентраций выбросов ЗВ от постоянно действующего источника при отсутствии и наличии ветра – представлены на рис. 2, где максимальная мощность источника выбросов Cm принята единичной.
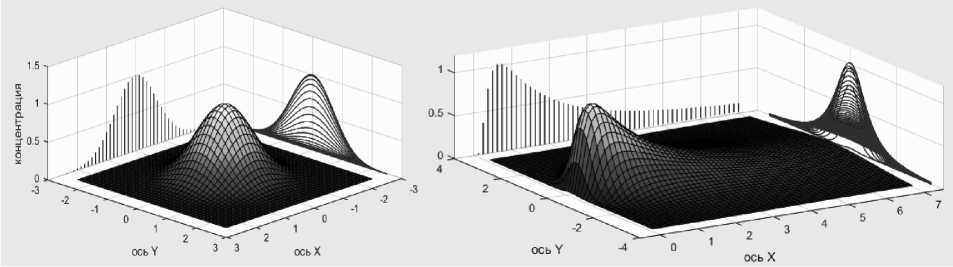
Рис. 2. Облако концентрации выбросов от постоянно действующего единичного источника
Полная модель расчёта концентрации выбросов
В конечном итоге полная математическая модель мониторинга (с периодичностью tk ) облака концентраций ЗВ Cttk ( x m ,y m ) для городского перекрёстка в каждом квадрате облака рассеивания с центром в точке ( xm,ym ) представляется общей формулой (9), в которой мощность выброса M ik определяется по формуле (10), а концентрация С ( xm - g i ,ym - П і ) в произвольной точке облака рассеивания определяется по формуле (12).
При этом вся проезжая часть зоны перекрёстка, попадающая в обзор видеокамеры уличного наблюдения, разбивается на N площадных источников выбросов, а параметры движения транспортного потока и его структура в каждую дискрету времени фиксируются в программной системе, построенной на основе нейросетевых алгоритмов.
Следует отметить, что программная система, построенная на основе изложенных выше математических моделей, уже апробирована и доступна для ознакомления по интернет-адресу AIMS eco – Realtime monitoring . В ней расчёты облака концентрации различных видов выбросов в приземном слое области городского перекрёстка реализованы с дискретой обновления в 3 с и учитывают силу и направление ветра.
Заключение
Представленные в работе математические модели расчёта количества и концентрации загрязняющих веществ от автотранспорта в зоне регулируемого пересечения позволяют проводить вычисления в режиме реального времени на основе высококачественного мониторинга параметров транспортного потока. Используемая для этих целей обученная нейронная сеть способна с высокой производительностью и точностью определять индивидуальные параметры движения каждого ТС, что является основой вычисления реальных данных о текущем состоянии загрязнения воздуха без использования дорогостоящих датчиков.
Программный комплекс, применяющий данное математическое обеспечение, формирует архив данных экологического мониторинга, который служит базой для различных видов анализа скрытых закономерностей влияния параметров транспортного потока на поле концентраций различных видов загрязняющих веществ.
Следует отметить, что разработанное математическое обеспечение является адаптацией регламентированных для РФ методик и даже их развитием в направлении более точных вычислений и мониторинга экологической ситуации, проводимого в реальном масштабе времени.
На основе корректной и точной информации об экологической ситуации в городских узлах транспортной сети возможно эффективное принятие управленческих решений в целях улучшения качества воздуха, и, как следствие, здоровья всех возрастных групп населения.
Исследование выполнено при финансовой поддержке гранта 24-21-20086: Конкурс 2024 года «Проведение фундаментальных научных исследований и поисковых научных исследований малыми отдельными научными группами» (региональный конкурс).
Список литературы Математическое обеспечение мониторинга выбросов загрязняющих веществ от автотранспорта в зоне регулируемого пересечения на основе нейросетевых алгоритмов
- Autonomous Electric Vehicles Can Reduce Carbon Emissions and Air Pollution in Cities / T. Ercan, N.C. Onat, N. Keya et al. // Transportation Research Part D: Transport and Environment. - 2022. - Vol. 112.
- Personal Exposure to Particulate Air Pollution during Commuting in European Cities -Recommendations and Policy Implications / A. Karanasiou, M. Viana, X. Querol et al. // Science of The Total Environment. - 2014. - Vol. 490. - P. 785-797.
- Heavy Metal Contamination and Health Risk Assessment of Road Dust from Landfills in Dhaka-Narayanganj, Bangladesh / M. Chakraborty, M.R. Rahat, T.R. Choudhury et al. // Emerging Contaminants. - 2023. - Vol. 10, Iss. 1. - 100278.
- MSGNN: A Multi-Structured Graph Neural Network Model for Real-Time Incident Prediction in Large Traffic Networks / T. Tran, D. He, J. Kim, M. Hickman // Transportation Research Part C: Emerging Technologies. - 2023. - Vol. 156. - 104354.
- Brusselaers, N. Rerouting Urban Construction Transport Flows to Avoid Air Pollution Hotspots / N. Brusselaers, C. Macharis, K. Mommens // Transportation Research Part D: Transport and Environment, 2023. - Vol. 119. - No. 103747.
- Urban Emissions hotspots: Quantifying Vehicle Congestion and Air Pollution using Mobile Phone GPS Data / C.K. Gately, L.R. Hutyra, S. Peterson, I.S. Wing // Environmental Pollution. - 2017. - Vol. 229. - P. 496-504.
- Yuan, W. Fuel Use and Emission Rates Reduction Potential for Light-Duty Gasoline Vehicle Eco-Driving / W. Yuan, H.C. Frey, T. Wei // Transportation Research Part D: Transport and Environment. - 2022. - Vol. 109. - No. 103394.
- Басков, В.Н. Категорирование участков улично-дорожной сети по степени риска транспортного затора с учетом скоростных интервалов / В. Н. Басков, А.В. Игнатов // Мир транспорта и технологических машин. - 2016. - № 3(54). - С. 53-59.
- Бояршинов, М. Г. Характеристики транспортного затора на основе данных системы фото-и видеофиксации / М.Г. Бояршинов, А.С. Вавилин // Интеллект. Инновации. Инвестиции. - 2023. - № 3. - С. 83-106.
- Buonanno, G. Influential Parameters on Particle Exposure of Pedestrians in Urban Microenvironments / G. Buonanno, F.C. Fuoco, L. Stabile // Atmospheric Environment. - 2011. - Vol. 45, Iss. 7. - P. 1434-1443.
- Meteorological Mechanism of Regional PM2.5 Transport Building a Receptor Region for Heavy Air Pollution over Central China / Y. Bai, T. Zhao, W. Hu et al. // Science of The Total Environment. - 2022. - Vol. 808. - 151951.
- Brusselaers, N. The Health Impact of Freight Transport-Related Air Pollution on Vulnerable Population Groups / N. Brusselaers, C. Macharis, K. Mommens // Environmental Pollution. - 2023. -Vol. 329, Iss. 4. - 121555
- Sharma, M. Assessment/Monitoring of Air Pollution and Effect on Human Health in Kota City During SPRING Season - 2020 / M. Sharma, A.K. Mathur // Materials Today: Proceedings, 2023. https://www.sciencedirect.com/science/article/pii/S2214785323050903
- A Large Eddy Simulation of the Dispersion of Traffic Emissions by Moving Vehicles at an Intersection / H. Woodward, M. Stettler, D. Pavlidis et al. // Atmospheric Environment. - 2019. -Vol. 215. - no. 116891
- New Insight into the Urban PM2.5 Pollution Island Effect Enabled by the Gaussian Surface Fitting Model: A Case Study in a Mega Urban Agglomeration Region of China / L. Yao, S. Sun, Y. Wang et al. // International Journal of Applied Earth Observation and Geoinformation. - 2022. - Vol. 113. -102982
- Приказ Министерства природных ресурсов и экологии РФ от 27 ноября 2019 г. № 804 «Об утверждении методики определения выбросов загрязняющих веществ в атмосферный воздух от передвижных источников для проведения сводных расчетов загрязнения атмосферного воздуха».
- Traffic Load Estimation from Structural Health Monitoring Sensors using Supervised Learning / A. Burrello, G. Zara, L. Benini et al. // Sustainable Computing: Informatics and Systems. - 2022. -Vol. 35. - 100704.
- Multi-YOLOv8: An Infrared Moving Small Object Detection Model Based on YOLOv8 for Air Vehicle / S. Sun, B. Mo, J. Xu etal. // Neurocomputing. - 2024. - Vol. 588. - 127685
- Urban Traffic Flow Analysis Based on Deep Learning Car Detection from CCTV Image Series / M.V. Peppa, D. Bell, T. Komar, W. Xiao // International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives. - 2018. - Vol. 42, no. 4. - P. 565-572.
- Berkowicz, R. Traffic Pollution Modelling and Emission Data / R. Berkowicz, M. Winther, M. Ketzel // Environmental Modelling and Software. - 2006. - Vol. 21, Iss. 4. - P. 454-460.
