Математическое обеспечение оценивания надёжности программных средств вычислительных кластеров

Автор: Александр Николаевич Привалов, Алексей Валерьевич Богомолов, Евгений Васильевич Ларкин, Татьяна Алексеевна Акименко
Рубрика: Математика
Статья в выпуске: 4 т.17, 2025 года.
Бесплатный доступ
Представлены результаты синтеза математического обеспечения априорного оценивания надежности программных средств вычислительных кластеров, учитывающего специфику их построения: параллельная обработка информации, высокая производительность, масштабируемость, повышенная отказоустойчивость, балансировка нагрузки, поддержка гетерогенных конфигураций. Разработанное математическое обеспечение основано на линеаризации исходного последовательного алгоритма и преобразовании его из линейной формы в параллельную. Линеаризация исходной структуры программного средства позволяет представить реализуемый им алгоритм в виде объединения последовательностей операторов, начинающихся и заканчивающихся в неисполнимых операторах. Процедура линеаризации включает этапы представления алгоритма, описывающего последовательную обработку данных, в виде графа; линеаризацию графа путем формирования графа реализаций с помощью матричной конкатенации матрицы его смежности; формирование параллельной структуры из линеаризованной модели за счет разделения последовательности операторов на фрагменты, число которых равно числу вычислительных кластеров. Получены математические зависимости расчета оценок вероятностей появления последовательностей операторов, не удовлетворяющих исходным требованиям к алгоритму, на основании законов распределений обрабатываемых данных и условий ветвления вычислительного процесса. Рассмотрены модели отказов, причинами которых являются ошибки синхронизации обработки данных в вычислительных кластерах. Поиск и оценивание вероятностей появления на линейной и параллельной форме ветвей, не удовлетворяющих требованиям технического задания на программное средство, позволило построить модель генератора отказов программных средств, обеспечивающего априорное оценивание времени наработки до отказа. Моделируемый поток отказов рассматривается как стохастическая сумма пуассоновских потоков, формируемых при кратном циклическом запуске вычислительного кластера. Время наработки программного средства на отказ рассчитывается на основании плотности распределения времени между отказами в пуассоновском потоке. Синтезированы математические модели генератора отказов и расчета оценки времени наработки программных средств на отказ, основанные на оценках вероятностей попадания параллельного вычислительного процесса в отказные ветви реализуемых алгоритмов. Приоритеты развития полученных результатов связываются с разработкой моделей отказов программных средств вычислительных кластеров вследствие структурных ошибок, допущенных при разработке параллельных программ.
Линеаризация графа, ветвление алгоритма, распараллеливание вычислений, наработка на отказ, надежность программного средства, программное средство вычислительного кластера
Короткий адрес: https://sciup.org/147252292
IDR: 147252292 | УДК: 004.942 | DOI: 10.14529/mmph250404
Mathematical Support for Assessing the Reliability of Software for Computing Clusters
The article presents the results of the synthesis of mathematical support for an a priori reliability assessment of software for computing clusters, taking into account the specifics of their design: parallel information processing, high performance, scalability, increased fault tolerance, load balancing, and support for heterogeneous configurations. The developed mathematical support is based on the linearization of the original sequential algorithm and its transformation from a linear form to a parallel one. Linearization of the original structure of the software allows representing the algorithm it implements as a union of sequences of operators that begin and end in non-executable operators. The linearization procedure includes the following stages: representing the algorithm describing sequential data processing as a graph; linearization of the graph by forming a graph of implementations using matrix concatenation of its adjacency matrix; formation of a parallel structure from the linearized model by dividing the sequence of operators into fragments, the number of which is equal to the number of computing clusters. The paper presents the mathematical dependencies for calculating probability estimates for the occurrence of operator sequences that do not satisfy the initial requirements for the algorithm, based on the distribution laws of the processed data and the branching conditions of the computational process. It considers failure models caused by data processing synchronization errors in computing clusters. The study also involved searching for and estimating the probabilities of branches occurring in linear and parallel forms that do not meet the requirements of the software tool's technical specifications. As a result, we constructed a model of a software failure generator that provides an a priori estimate of the mean time to failure. The simulated failure flow is considered as a stochastic sum of Poisson flows formed during multiple cyclic launches of the computing cluster. The mean time between failures of the software is calculated based on the density of the distribution of the time between failures in the Poisson flow. Mathematical models of the failure generator and the calculation of the mean time between failures are synthesized, based on estimates of the probabilities of the parallel computing process entering the failure branches of the implemented algorithms. The priorities for the development of the obtained results are associated with the development of models of software failures of computing clusters due to structural errors made during the development of parallel programs.
Текст научной статьи Математическое обеспечение оценивания надёжности программных средств вычислительных кластеров
Интеллектуализация и цифровизация промышленных технологий предполагает существенное повышение производительности средств обработки данных [1–3]. Это может быть достигну-
Привалов А.Н., Богомолов А.В., Математическое обеспечение оценивания надёжности Ларкин Е.В., Акименко Т.А. программных средств вычислительных кластеров то за счет внедрения универсальных вычислительных кластеров, объединяющих множество независимых компьютеров-узлов в единую систему с общей файловой системой, высокоскоростной коммуникационной сетью и распределенной архитектурой [4, 5].
Широкое применение вычислительных кластеров актуализирует вопросы обеспечения надежности их аппаратных и программных средств. Надежность аппаратных средств обеспечивается за счет совершенствования технологий их проектирования, изготовления и эксплуатации, и в настоящее время является хорошо изученным вопросом [6, 7]. Программные средства вычислительных кластеров обладают рядом отличительных особенностей, выделяющих их среди других программных средств: параллельная обработка информации, высокая производительность, масштабируемость, повышенная отказоустойчивость, балансировка нагрузки, поддержка гетерогенных конфигураций - поэтому вопросы обеспечения их надежности требуют изучения [8-11].
Разработка технологий повышения надежности программных средств требует наличия модели формирования, выявления и рискометрии ошибок [12]. Структура модели должна формироваться по результатам анализа алгоритма функционирования вычислительного кластера, но не должна быть идентичной ему, поскольку ошибки программирования означают, что разработанное программное средство не соответствует заданным техническим требованиям, а модель должна выявлять именно эти различия, приводящие к отказам [13-15].
Основным недостатком известных подходов к оцениванию надежности программных средств [16, 17] является то, что:
-
- они ориентированы на исследование надежности программных средств однопроцессорных ЭВМ;
-
- оценки параметров надежности рассчитываются на основе эмпирических данных о количестве ошибок, выявленных между двумя наблюдениями за работой тестируемой программы, а следовательно, на результат оценивания сильно влияют как период наблюдения, так и покрытие области пространства обрабатываемых данных подобластью данных, генерируемых тестирующей программой.
Вместе с тем цена ошибки при анализе надежности вычислительных кластеров является, как правило, высокой, поэтому задача разработки надежной программы сводится к выявлению и устранению потенциальных причин отказов на этапе разработки, до ввода программных средств в эксплуатацию. Априорное оценивание надежности программных средств вычислительных кластеров на этапе их разработки недостаточно распространено в инженерной практике. Поэтому проведено исследование, имевшее целью разработку математического обеспечения априорного оценивания надёжности программных средств вычислительных кластеров.
Схема вычислительного процесса
Программные средства вычислительных кластеров в процессе разработки проходят следующие этапы [18], на каждом из которых возможно появление ошибок, обусловленных человеческим фактором.
Этап 1 . Разработка алгоритма, описывающего последовательную обработку данных в виде графа (рис. 1, а ), структура которого описывается выражением G = { A, r } , где A = { а о , a 1,..., a j ,..., a j + 1} - множество вершин, каждая из которых является абстрактным аналогом оператора алгоритма; r = ^ r i , j ^ - матрица смежности размерности ( J + 2)( J + 2), описывающая связи между операторами алгоритма; r i , j- = ( a i , a j ).
В общем случае алгоритм включает неисполнимые операторы «Начало» ( a о ) и «Конец» ( a J + 1), а также J исполнимых операторов, представляемых вершинами a 1 ... a J . Оператор «Начало» выполняет перезапуск алгоритма, а оператор «Конец» моделирует завершение обработки данных. Факт перезапуска алгоритма моделируется с помощью дуги ( a J + 1, a 0), показанной на рис. 1, а пунктирной стрелкой. В матрице смежности элемент r i,j = ( a i , a j ) обозначает дугу, ведущую из a i в a j ; 1 < i , j < J + 1. Значение r i , j = 0 , где 0 - пустой элемент, означает, что в структуре графа G дуга ( a i , a j ) отсутствует.
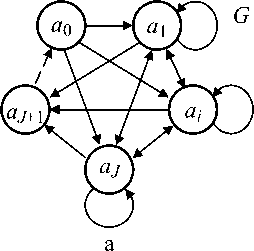
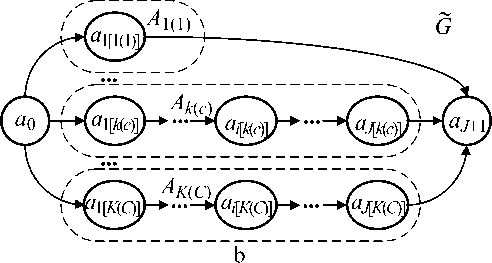
Рис. 1. Исходный последовательный алгоритм обработки данных в вычислительном кластере (a) и его линеаризованная версия (b)
Корректно сконструированный последовательный алгоритм обладает свойствами:
-
- в оператор «Начало» можно войти только при запуске программы, то есть r i , 0 =0 ,0 < i < J + 1;
-
- попадание в оператор «Конец» означает остановку исполнения программы то есть r j +1, j =0 ,0 < j < J + 1;
-
- среди исполнимых операторов отсутствуют операторы, образующие автономные и полуав-тономные циклы первого и второго рода, то есть в структуре графа G существует хотя бы один путь, ведущий из а 0 в a i , и хотя бы один путь, ведущий из a i в a J + 1, 0 < i < J ;
-
- каждый путь, ведущий из а0 в aJ+ j, включает хотя бы одну вершину подмножества
{ a 1 ,..., a j }.
Невыполнение любого из этих свойств означает, что при составлении последовательного алгоритма допущена ошибка, которая является источником потенциальных отказов программных средств вычислительного кластера.
Этап 2 . Линеаризация графа G, для чего матрица его смежности r возводится в с -ю конкате-национную степень, при этом формируется граф реализаций (рис. 1, б )
G = 1 0&
с (&)
c (&)=1
& I J +1 ,
где r c (&) - операция возведения матрицы смежности в c (&) -ю конкатенационную степень; & -обозначение логической операции конкатенации; I R0 = ( а 0, 0 ,..., 0 ), I CJ + 1 = ( 0 ,..., 0 , a J + 1) 0 -соответственно вектор-строка размерности 1 х ( J + 2) и вектор-столбец размерности ( J + 2) х 1; 0 - обозначение операции транспонирования; C (&) - максимальное значение конкатенационной степени, в которую возводится матрица смежности r ; 0 - пустой элемент.
Возведение матрицы смежности в c( где & - матричная конкатенация; rc(&)—1 - [c(&) -1] -я конкатенационная степень матрицы r;
Конкатенация ранее построенной последовательности вершин с пустым элементом прерывает последовательность. Конкатенация IR 0 с матрицей смежности производится по правилам ум ножения вектора-строки на матрицу, а матрицы смежности с вектором IC J+1 - по правилам умножения матрицы на вектор-столбец.
В общем случае граф G имеет вид, показанный на рис. 1, б . Вершины графа образуют линей-
Привалов А.Н., Богомолов А.В., Математическое обеспечение оценивания надёжности Ларкин Е.В., Акименко Т.А. программных средств вычислительных кластеров ные (не содержащие циклов и ветвлений) последовательности A k ( c ) исполнимых операторов алгоритма, задействованных в k ( с )-й реализации. Последовательности имеют вид
Очевидно, что данные, обрабатываемые алгоритмом, являются дискретными и случайными.
Поэтому они могут быть представлены в виде множества векторов
Ц D m = { [ D 0 ( m )]..... [ D n ( m ) ].....[ D N ( m ) -1 ]Н ° «И ’
—’D n ( Z ) >—>D N ( Z ) -1 } ’
m =1
где Dm = D^ ту—9 Dn(my.",DN(m)-i - множество дискретных значений обрабатываемой величины; D^ = [ D^ ..., Dn. ( m) >--->Dn ( M )] - обобщенный вектор обрабатываемых данных, описы вающий соответствующую комбинацию; n(Z) - номер комбинации; Ц - групповое декартово M произведение множеств; N (Z) = П N (m) • m=1
Фактор случайности значений дискретных данных, поступающих на обработку, описывается континуальной плотностью распределения, которая представляется в виде взвешенной суммы 8 -функций Дирака
N (Z)-1
f ( D ) = Z P n ( z ) К D — D n ( z ) ) ,
n (Z)=0(Z)
где pn(Z) - вероятность появления комбинации Dn(Z); S(D - Dn(Z)) - векторная 8-функция Ди рака:
К D — D n (Z) ) = К D 1 — D n (1) ) ■
K ( D m — D n ( m ) ) ■ ... K ( Dm - D n ( M ) ), J ... J ... j K ( D - D n (Z) ) d D = 1.
-да -x -x
Если элементы вектора D некоррелированы между собой, то для каждого элемента может быть определена плотность распределения
N ( m )-1
f m ( D m )
= Z p n ( m ) К ( Dm - Dn ( m ) ) *
n ( m )=0
А общая плотность распределения в этом случае равна произведению плотностей отдельных случайных величин, то есть
M f ( D ) =П fm (Dm ) *
m =1
Ветвление вычислительного процесса G определяется логическими условиями переключения из текущей вершины ai[к(c)] g Ак(c) в смежные с ней вершины из подмножества {ai}, 1 < i < J +1. В свою очередь, если ai[к(c)] = ai, где ai[к(c)] - вершина, принадлежащая последовательности, сформированной в результате конкатенации, а ai - вершина, принадлежащая под- множеству, то логические условия присоединения к последовательности Ак(c) вершины из под множества {ai} определяются вектором отношений ф=kj (D )< °] • где pi, j (D) - некоторая функция от данных дискретного пространства D , 1 < i < J +1.
Принимая во внимание, что в программе отсутствуют полуавтономные циклы, в том числе «зависания», одно из условий отношения вектора Ф всегда выполняется, события выполнения отношений являются несовместными и составляют полную группу. С использованием отношений вектора Ф может быть получена оценка вероятности того, что при следующем выборе ветви программы к последовательности A k ( c ) будет добавлена вершина a j , то есть a i [ k ( c ) ] + 1 = a j будет равна
P{i[k ( c )] = i , i [ k ( c )] + 1 = j } = J ... J ... J f ( D )d D .
P i , j ( D )<0
Вероятность появления последовательности A ^^ определяется как произведение вероятностей:
J [ k ( c )]
PA k ( c ) ] = П P { i [ k ( c )] = i , i [ k ( c )] + 1 = j} .
i [ k ( c )]=1[ k ( c )]
Преобразование G графа G является эквивалентным, поэтому можно считать, что ошибок на этом этапе не возникает. Однако такое преобразование позволяет выявлять следующие ошибки в исходном алгоритме:
-
- наличие в структуре G последовательностей с «неправильной» (большей или меньшей длины, определенной решаемой с помощью алгоритма задачи) длиной;
-
- выпадение из последовательностей структуры G операторов, необходимых для решения задачи;
-
- наличие в последовательностях структуры G «неправильных» и/или «лишних» операторов;
-
- наличие в последовательностях со структурой G фрагментов с неправильным чередованием операторов, например, нарушающим отношение предшествования.
Для указанных последовательностей могут быть определены вероятности их появления в структуре G , а также общая вероятность отказа/сбоя программных средств при реализации алгоритма со структурой G :
Pfail = Z P[k(c)] ’ k (c)
где k ( c ) - номера сбойных ветвей структуры G ; P [ k ( c )] - вероятности появления сбойных ветвей в структуре алгоритма, оцениваемые как вероятности появления последовательностей A k ( c ) .
Этап 3 . Формирование параллельной структуры из линеаризованной модели G .
Один из способов формирования параллельной структуры основан на разделении последовательности A k ( c ) на L фрагментов, реализуемых на L вычислительных кластерах (рис. 2, а ).
Модель представляет собой сеть Петри
П = {{Пl}’ {ao, aJ+1}, {z0> zJ+1}, ^in {z0, zJ+1}, Tout {z0, zJ+1}} , где П l - подсеть, описывающая последовательность операторов, исполняемых l-м вычислительным кластером, 1 < l < L ; {a0, aJ+1} - позиции, моделирующие неисполнимые операторы алгоритма; z 0, zJ+1 - переходы, моделирующие соответственно начало и окончание параллельной обработки данных; Тin {z0, zJ+1 } , Т out {z0, zJ+1} - входная и выходная функция переходов; Тin(z0) = a0; Тout(zj+1) = aj+1; 4in(zj+1) = {Пt} ; ТoUt(z0) = {Пl}.
В свою очередь, подсети П l , описывающие вычислительные кластеры (в индексе функции l [ k ( c )] для краткости параметры k ( c ) опущены), имеют вид
Привалов А.Н., Богомолов А.В., Ларкин Е.В., Акименко Т.А.
Математическое обеспечение оценивания надёжности программных средств вычислительных кластеров
Пl {{ai(k,l)} , {zi(k,l)},^in {zi(k,l)}, ^out {zi(k,l)}} , где {ai(k,l)} - множество позиций, ai(k,l) g Ak(c); {zi(k,l)} - множество переходов;
*. [ z ( и ) ] = a i ( kJ ) ; * out [ z ,( kJ ) ] = a i ( JJ ) + 1, 1 ( k , l )< i ( k , 1 ) < J ( k , l ) - 1.
Сеть Петри описывает передачу управления от одного оператора к другому внутри вычислительных кластеров. Наряду с передачей управления внутри вычислительных кластеров естественным образом организуется передача данных, формируемых предшествующим оператором, всем последующим операторам. Простое разделение последовательности на фрагменты может породить ситуацию, когда данные, формируемые оператором m -го фрагмента, должны быть использованы операторами l -го фрагмента, а передача данных из m -го в l -й вычислительный кластер не предусмотрена (случай при m = 1 показан на рис. 2, а двойной стрелкой). Эта типичная ошибка распараллеливания может привести к отказу при реализации последовательности A k ( c ) в целом, а следовательно, вероятность такого события входит в формулу для расчета p fail как одно из слагаемых.
Ошибки подобного типа устраняются программно за счет введения промежуточной синхронизации вычислительного процесса, проводимой на переходе z 1(- k ,1) (рис. 2, b ). При промежуточной синхронизации
* in [ z 1( k ,1) ] = { a 1( k ,1) , ai ( k , l )-1} , * out [ z 1( k ,1) ] = { a 2( k ,1) , a i ( k , l )} .
Такое введение входной и выходной функции на переходе z^ k ,1) замедляет процесс кластерной обработки данных, но уменьшает вероятность отказов программных средств.
Генерация потока отказов
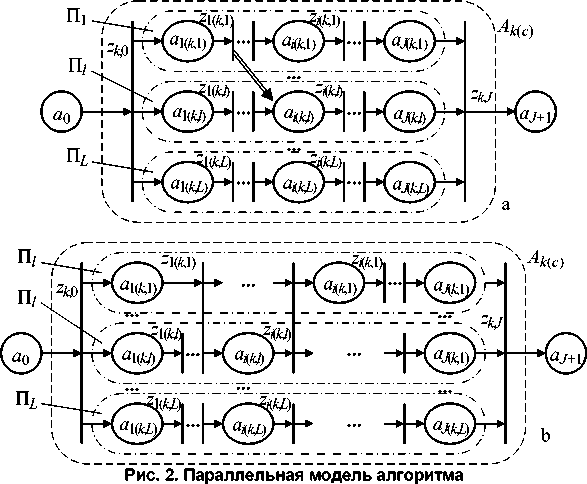
Модель генерации потока отказов в вычислительном кластере приведена на рис. 3. Алгоритм генерации представлен в виде графа
Г = { A , р } , где A = { a 0, a 1, a 2} - множество вершин; а 0 - моделирует неисполнимый оператор «Начало»; а 1 - моделирует исполнимый оператор обработки данных в вычислительном кластере; а 2 - моделирует неисполнимый оператор «Конец»; р = [ p i, j ] - матрица смежности размерности 3*3:
p =
p i,2 0
0 ( a 0, a 1 ) 0
0 ( a i , a i ) ( a i , a 2 )
00 0
p 0,1
P 1,1 0

T e

1 - p fail p fail ^\ a2 T exel
Рис. 3. Модель генерации потока отказов вычислительного кластера
При исполнении алгоритма в вычислительном кластере отказ происходит с вероятностью p fail и обработка данных прекращается. С вероятностью (1– p fail ) программа завершается и перезапускается в штатном режиме. Исполнение оператора а 1 осуществляется за время, равное T exe секунд.
Применение к матрице смежности p графа G , в котором 1 0 = ( a 0, 0 , 0 ), 1 2 = ( 0 , 0,а2)3 дает последовательности исполнимых операторов, сведенные в таблицу.
Формирование последовательностей исполнимых операторов
|
с |
Последовательности операторов |
Вероятность появления |
Время до отказа |
|
1 |
– |
– |
– |
|
2 |
a 0, a 1, a 2 |
p fail |
T exe |
|
3 |
a 0, a 1, a 1, a 2 |
2 p fail |
2T exe |
|
k |
a 0, a 1,..., a 1,..., a 1,... a 2 1 c - 1 1 |
P fi1 |
( c - l^T exe |
|
K |
a 0, a 1,..., a 1,..., a 1,... a 2 1 C - 1 1 |
Pfail |
( C — I T exe |
Из таблицы следует, что поток отказов может рассматриваться как стохастическая сумма потоков, формируемых при одно-, двух-, трех- и более кратном циклическом запуске вычислительного кластера. В соответствии с теоремой Б.И. Григелиониса, такой поток стремится к пуассоновскому [19]. Плотность распределения времени между отказами в пуассоновском потоке равна [20–22]
fff(1) = T-fe-tT-f, где Tbf – время наработки программного средства на отказ, оценка которого в предельном случае при С^х рассчитывается по зависимости
T bf = T exe p fail.
Отметим, что при эксплуатации программных средств вычислительных кластеров ошибки, приводящие к отказам, как правило, устраняются [23–25]. Это означает, что количество сбойных ветвей в графе G уменьшается, а, следовательно, и уменьшается вероятность p fail – время наработки системы до отказа при этом увеличивается.
Заключение
Таким образом, разработано математическое обеспечение оценивания надежности программных средств вычислительных кластеров, основанное на линеаризации исходного последовательного алгоритма и преобразовании его из линейной формы в параллельную. Поиск и оценивание вероятностей появления на линейной и параллельной форме ветвей, не удовлетворяющих требованиям технического задания на программное средство, позволило построить модель генератора отказов программных средств и обеспечить априорное оценивание времени наработки до
Привалов А.Н., Богомолов А.В., Математическое обеспечение оценивания надёжности Ларкин Е.В., Акименко Т.А. программных средств вычислительных кластеров отказа. Дальнейшее развитие исследований связывается с разработкой моделей отказов программных средств вычислительных кластеров вследствие структурных ошибок, допущенных при разработке параллельных программ.
Работа выполнена при поддержке гранта РНФ 25-29-20177.
