Математическое обоснование предельного значения касательной силы тяги на ведущих колесах для транспортно-технологических машин

Автор: Музафаров Э.Р., Филькин Н.М.
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.23, 2023 года.
Бесплатный доступ
В статье рассмотрены аспекты определения предельной силы тяги на ведущих колёсах наземных транспортно-технологических машин (НТТМ) с колёсной формулой 4×2. Для этого были выявлены критерии, ограничивающие максимальное значение силы тяги на ведущих колесах, которое можно реализовать на машинах такого типа. Эти критерии определяются крутящим моментом, создаваемым двигателем и преобразуемым трансмиссией, и укрупнённо относятся к следующим группам: связанные с началом буксования ведущих колес, определяющие опрокидывание НТТМ и предельные моменты для разрушения элементов трансмиссии. В статье представлены математические зависимости, разработанные для определения предельных значений силы тяги на колесах НТТМ. Авторами разработана модель, которая позволяет проводить численные эксперименты для определения оптимальных параметров двигателя и трансмиссии, что, в свою очередь, позволяет определить и предельную силу тяги, с которой можно оперировать при дальнейшей разработке проекта. Эти зависимости позволяют учесть в уравнении тягового баланса воздействие различных факторов, которые оказывают влияние на реализацию крутящего момента, таких как масса машины, включая распределение массы по осям и относительное положение центра масс, коэффициент трения, угол наклона дороги и другие параметры взаимодействия с опорной поверхностью, а также характеристики трансмиссии, ограничивающие тяговые возможности машины. После преобразования полученных математических выражений авторами статьи описана зависимость, определяющая предельно допустимый момент вращения на коленчатом валу двигателя. Это позволяет учитывать характеристики двигателя при определении предельной силы тяги и обеспечивает возможность выбора мощностных показателей двигателя для конкретной транспортно-технологической машины и передаточных чисел трансмиссии.
Силовой баланс машины, сила тяги на ведущих колесах, предельное значение силы тяги, буксование ведущих колес, разрушение агрегатов трансмиссии
Короткий адрес: https://sciup.org/147242633
IDR: 147242633 | УДК: 629.3.015 | DOI: 10.14529/engin230403
Mathematical substantiation of the limit value of tagential traction force on driving wheels for transport-technological machines
The paper deals with the aspects of determining the ultimate traction force on the driving wheels of land transport and technological machines (LTTM) with 4×2 wheel arrangement. The purpose of the study was to identify the criteria that limit the maximum value of traction force on the driving wheels that can be realized on machines of this type. These criteria are determined by the torque generated by the engine and transformed by the transmission, and are grouped into the following groups: those related to the onset of slipping of the driving wheels and those determining the overturning of the NTTM and the limiting moments for the destruction of the transmission elements. The article presents mathematical dependencies developed to determine the limit values of traction force on the wheels of NTTM. The authors have developed a model that allows conducting numerical experiments to determine the optimal parameters of the engine and transmission. This allows determining the limit thrust force which can be operated with in the further development of the project. These dependencies allow taking into account the influence of various factors in the traction balance equation. The factors affecting the realization of torque are the mass of the machine, including the distribution of mass on the axles and the relative position of the center of mass, the friction coefficient, the angle of inclination of the road and other parameters of interaction with the supporting surface, as well as the characteristics of the transmission that limit the traction capabilities of the machine. After transforming the obtained mathematical expressions, the authors describe the dependence that determines the maximum allowable torque on the crankshaft of the engine. It allows taking into account the engine characteristics when determining the limiting force of traction and provides the possibility of choosing the engine power characteristics for a particular transport-technological machine and transmission ratios.
Текст научной статьи Математическое обоснование предельного значения касательной силы тяги на ведущих колесах для транспортно-технологических машин
Целью данной работы является формирование математического аппарата для дальнейшего совершенствования математического моделирования движения колёсной транспортной машины с колесной формулой типа 4×2 с заднеприводной компоновкой. В статье рассмотрены факторы, влияющие на предельное значение тяговой силы на ведущих колёсах транспортной машины [1].
В качестве объекта исследования была выбрана унифицированная машина технологического электротранспорта, разработанная Ижевским государственным техническим университетом имени М.Т. Калашникова для Сарапульского электрогенераторного завода (СЭГЗ) [1, 2] в соответствии с постановлением Правительства Российской Федерации от 9 апреля 2010 г. № 218 «О мерах государственной поддержки развития кооперации российских образовательных организаций высшего образования, государственных научных учреждений и организаций, реализующих комплексные проекты по созданию высокотехнологичного производства».
Наземные транспортно-технологические машины при перемещении кроме перевозки грузов россыпью, навалом и т. п. могут выполнять различные технологические операции, например, различные виды работ (используются стандартные навесные устройства для различного передне- и задненавесного оборудования) при уборке снега, мелкого мусора, грязи и пыли [1–3], что требует анализа возможного максимального момента двигателя, подводимого к ведущим колесам и влияющего на эксплуатационные показатели, включая активную безопасность эксплуатации НТТМ.
Формирование математического аппарата
Математическим уравнением, которое определяет мгновенную возможность гарантированного движения, является уравнение силового баланса [3–5]. В общем виде уравнение силового баланса НТТМ можно представить в виде:
FK =Σ Fc , (1)
где FK – сила тяги на ведущих колесах, Н; Σ Fc – сумма сил сопротивления движению, Н, которая может быть представлена формулой [3]:
Σ Fc = + Fw + Fa + Fj , где F^ – сила сопротивления качению автомобиля, Н; Fw – сила сопротивления воздуха, Н; Fa – сила сопротивления подъёму, Н; Fj – сила инерции, Н.
Дальнейшее усложнение не требуется, так как в данной статье силы сопротивления рассматриваются только как результирующий фактор, Σ Fc. При этом из уравнения (1) следует, что при FK>ΣFcпоявится ускорение ̈, равное, по второму закону Ньютона, ̈= , где m – масса автомобиля.
Однако избыток силы тяги может вызвать отрицательный результат, например: пробуксовку колёс, продольное опрокидывание, выход из строя агрегатов трансмиссии из-за чрезмерной нагрузки [5–8].
Первые два фактора могут не позволить машине тронуться с места, как, например, при старте под углом на скользкой поверхности или при смещении центра тяжести к задней оси у переднеприводного транспортного средства. Также могут возникать ударные нагрузки в трансмиссии, которые приводят к увеличению вероятности выхода из строя агрегатов трансмиссии из-за чрезмерной нагрузки [7].
Поэтому при проектировании НТТМ необходимо найти баланс между избыточной и недостаточной силами тяги на ведущих колёсах. Рассмотрим НТТМ с колесной формулой типа 4×2.
Пробуксовка колёс – это наиболее часто встречающееся последствие избыточной силы тяги. Сила тяги при буксовании ведущих колес НТТМ
FtB = ∙9∙соѕ(α) ∙λK∙φ, где m – масса автомобиля, кг; 9 – ускорение свободного падения, м/с2; φ – коэффициент сцепления колес с опорным покрытием, зависящий от типа и состояния покрытия, α – угол подъёма, град; λK – коэффициент нагрузки колес ведущей оси для НТТМ типа 4×2 в момент трогания, который определяется по уравнению [8]:
-
3 _ GD ± fa ,
λК= , где Gd – масса, приходящаяся на ведущуюся ось колёс базовой НТТМ без навесного оборудования, Н; Fa – сила, действующая на ось от навесного оборудования, Н; G – масса НТТМ, Н.
Для ведущего моста с межколесным дифференциалом необходимо учитывать, что буксование будет возникать на колесе с минимальным сцеплением, следовательно, уравнение примет вид:
FtB = min(m∙9 ∙ соѕ(α) ∙ ^Ki ∙φi), где i – номер колеса ведущей оси (от 1 до 2); ^Ki – коэффициент нагрузки колеса ведущей оси.
Продольное опрокидывание практически не встречается сегодня на современных стандартных НТТМ. Но может возникнуть на грузовом и технологическом транспорте при нарушении условий эксплуатации, таких как превышение установленного веса транспортировки или погрузки. Кроме того, может даже привести к потере управления, в случае если вывешенная ось является управляемой, или даже к опрокидыванию при возникновении достаточного момента для смещения центра тяжести машины за ось [9].
Несмотря на то, что данная проблема почти не встречается на современных легковых серийных автомобилях, она крайне актуальна для технологического транспорта, в частности такого, который используется с навесным оборудованием.
В этом случае сила сопротивления опрокидыванию на ведущих колесах определяется по формуле
„ _ МСр
Ftp=, гк где тк – динамический радиус колеса, м; Meo – суммарный вращающий момент сопротивления опрокидыванию, который можно определить по формуле, Нм:
fhl m ∙ 9 ∙ соѕ(α) г ho m ∙ 9 ∙ соѕ (α)
Meo = ⃗∙ dℎ+ ⃗∙ -dℎ, k0 dℎ ^ℎ, где для заднеприводной компоновки автомобиля: ℎQ – продольная координата центра задней оси, м; ℎ^ – расстояние от ℎQ до крайней точки транспортной машины по направлению действия силы тяги, м; ℎ – расстояние от ℎQ до крайней точки транспортной машины против направления действия силы тяги, м; ⃗ – радиус-вектор, направленный по направлению приложения касательной силы тяги.
Альтернативным, более простым для анализа выражением может быть суммирующая функция. Зная массово-габаритные характеристики агрегатов исследуемой НТТМ, можно рассчитать момент сопротивления из упрощенного уравнения как сумму моментов, создаваемых результирующим воздействием масс агрегатов по центрам их тяжести [10].
В этом случае формула для определения суммарного вращающего момента сопротивления опрокидывания:
Meo = ∑ i [ ⃗∙ m; ∙9 ∙ соѕ(α)] - ∑Ln[ ⃗∙ m; ∙9 ∙ соѕ(α)], где 1q – номер агрегата, центр масс которого расположен вертикально над осью; in , i_n– номера агрегатов, центр масс которых находится за пределами оси; m; – масса i-го агрегата, кг;
⃗ – радиус-вектор i -го агрегата, который находится из уравнения
⃗=ℎо -ℎa, где ℎ Ci – продольная координата центра тяжести агрегата.
На рисунке представлена поясняющая схема.
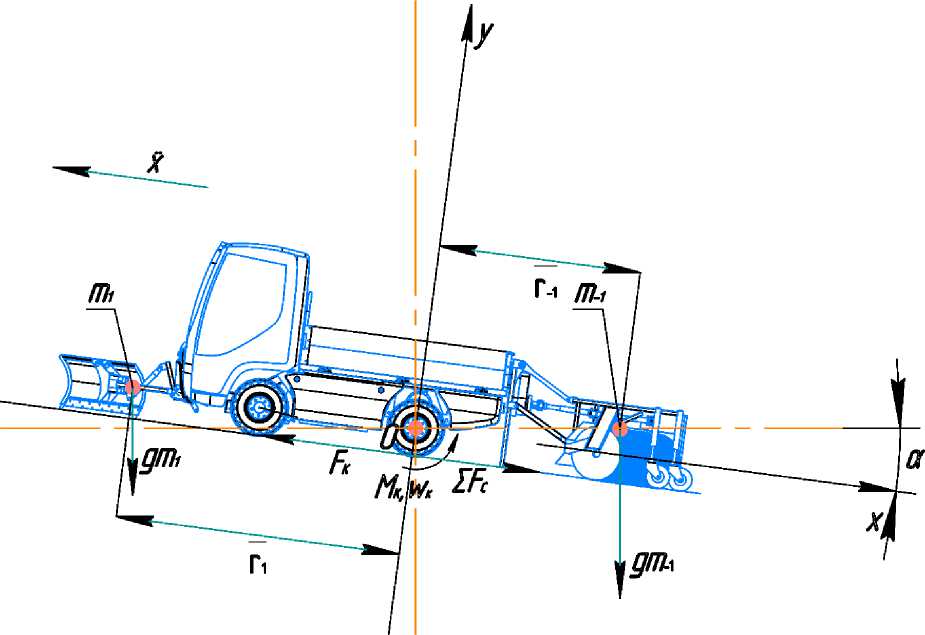
Схема приложения сил, возникающих при использовании навесного оборудования для расчёта опрокидывающего момента
Schematic of the forces arising from the use of attachments to calculate the tipping moment
На рисунке: , – эквивалент массы навесного оборудования в точке центра тяжести переднего плуга и задней щётки соответственно, кг; , – результирующая сила, Н; , ⃗ – радиус-вектор, м; α – угол подъёма, град; O – координата центра вращения ведущей оси; x, y – относительные оси координат транспортного средства, MK – момент вращения на колесе, Нм; wK – направление вращения колеса; ̈ – ускорение транспортного средства, м/с2; FK – сила тяги на колесе, Н; FK – сила сопротивления движению, Н.
Разрушение элементов трансмиссии чаще всего происходит при нарушении требований эксплуатации, поскольку при проектировании закладывается нагрузочный режим с избыточной нагрузкой. Расчёты на предельную прочность трансмиссии проводят по трём режимам, а именно:
по максимальному моменту двигателя, по максимальным динамическим нагрузкам и по максимальному сцеплению ведущих колёс с дорогой [10–12].
Тогда для условия реализации максимального момента трансмиссией без повреждений сила тяги на ведущих колесах, приводящая к выводу из строя трансмиссии, равна [13]:
min ([ Mpt ])
FtM = , где [Mpi] – предельный допустимый момент i-го элемента трансмиссии, Н·м.
Приведение к единой функции определения касательной силы тяги
Суммируя вышесказанное, можно сделать заключение, что при расчётах величина FK огра- ничена следующей системой неравенств:
(FK >Σ Fc ;
j Fк < FtB ;
I Fk< Ftp ; xFK < FtM .
Данная система при раскрытии рассматриваемых ограничений для максимальной касатель- ной силы тяги выглядит следующим образом:
r m ∙ g ∙ соѕ(α) ∙ A^i ∙φ ;
∑ io[ ⃗∙ mt ∙ g ∙соѕ(α)] -∑i-n[ ⃗∙ mt ∙ g ∙ соѕ(α)],
Fk < min <
;
min ([ Мр^ ])
rK
Тогда предельно допустимая величина касательной тяги [ Fr ] будет равна
[ Fk ] =min( FtB , Ftp , FtM ).
F
Следовательно, при нахождении минимума данной функции будет определено предельное тяговое усилие на ведущих колесах, которое может быть реализовано на проектируемой НТТМ. Отметим, что при таких расчётах необходимо принимать коэффициенты сцепления шин с поверхностью дорожного покрытия φ как наиболее высокие [14].
Для практического применения расчёты более удобно производить от двигателя, причём, как правило, наиболее удобным является расчёт, исходя из создаваемого двигателем момента вращения [15–18].
Тогда с учётом передаточных чисел и КПД трансмиссии можно получить следующую зависимость предельно допустимого момента вращения двигателя [9] [ ME ]:
[ FA ]∙ ^K Ση∙Σ и ,
[ ME ]=[ FE ]∙ rE
где [Fe] – предельно допустимая тангенциальная сила на валу двигателя, Н; rE – радиус вала двигателя, м; Ση – суммарный КПД от вала двигателя до колеса; Σи – суммарное передаточное число от коленчатого вала двигателя до колеса.
Следовательно, предельно допустимый момент вращения двигателя равен
|
min |
г т ∙ д ∙ соѕ(α) ∙ Л^( ∙φ i ; ⎪ ∑ io[ ⃗∙Ш; ∙ g ∙ соѕ(α)] - ∑ i-n[ ⃗∙m; ∙ g ∙ соѕ(α)], ⎪ |
|
TK ; ⎪ min ([ Mpi ]) ⎪ |
|
|
м . ∙ |
⎩ ^K ⎭ |
|
[]= [ мЕ ]= |
Ση ∙ Σ и |
Обсуждение
Выполненные исследования позволили построить формулу для расчета предельного значения касательной силы тяги на колёсах и формулу для определения предельно допустимого момента вращения двигателя на коленчатом валу двигателя, которые можно реализовать без буксования ведущих колес, опрокидывания и разрушения элементов трансмиссии, проектируемой НТТМ. Подобные работы актуальны и проводятся в странах с активно развивающейся автомобильной отраслью, а результаты таких работ публикуются в источниках высокого уровня [19–29].
Список литературы Математическое обоснование предельного значения касательной силы тяги на ведущих колесах для транспортно-технологических машин
- Музафаров Э.Р., Филькин Н.М. Обоснование выбора компоновочной схемы привода унифицированной машины технологического электротранспорта //Автомобилестроение: проектирование, конструирование, расчет и технологии ремонта и производства: материалы IV Всероссийской научно-практической конференции, Ижевск, 24 апреля 2020 года. Ижевск: Ижевский государственный технический университет имени М.Т. Калашникова, 2020. С. 74–80.
- Музафаров Э.Р. Методы оптимизации в проектировании машин // Вестник Концерна ВКО «Алмаз Антей». 2021. № 4(39). С. 57–66. DOI: 10.38013/2542-0542-2021-4-57-6
- Умняшкин В.А., Филькин Н.М., Музафаров Р.С., Хамидуллин Р.П. Выбор мощности тягового электродвигателя, двигателя внутреннего сгорания и параметров накопителей гибридных силовых установок автомобилей: учеб. пособие. Ижевск: НИЦ «Регулярная и хаотическая динамика», 2006. 137 с.
- Шилин А.С. Электронные системы транспортных средств // Современные тенденции развития аграрной науки: сборник научных трудов международной научно-практической конференции, Брянск, 01–02 декабря 2022 года. Часть 2. Брянск: Брянский государственный аграрный университет, 2022. С. 721–729.
- Zhileykin M., Eranosyan A. Method of torque distribution between the axles and the wheels of the rear axle to improve the manageability of two-axle all-wheel drive vehicles // IOP Conference Series: Materials Science and Engineering. Design Technologies for Wheeled and Tracked Vehicles, MMBC. 2019. 2020. P. 012008. URL: https:iopscience.iop.org/article.pdf.
- Беляев А.Н., Тришина Т.В., Афоничев Д.Н. Анализ боковых реакций почвы на колесах трактора при повороте // Resources and Technology. 2022. Т. 19, № 3. С. 44–56.
- Скрынников А.В., Шихин А.В., Попов А.А., Сидоров В.Н. Моделирование взаимодействия шины колеса с опорным основанием опорно-ходового модуля // Инженерный вестник Дона. 2022. № 6(90). С. 88–97.
- Задворнов В.Ю., Кочетков А.В., Янковский Л.В., Чудинов В.А. Натурный эксперимент по определению качественной картины процесса буксования колеса автомобиля // Химия. Экология. Урбанистика. 2019. Т. 2. С. 84–90.
- Беляев А.Н., Тришина Т.В., Новиков А.Е., и др. Исследование движения колесной машины по криволинейной траектории // Вестник Воронежского государственного аграрного университета. 2021. Т. 14, № 4(71). С. 21–29.
- Малиновский М.П. Определение центра тяжести автотранспортного средства с использованием массово-габаритных характеристик его агрегатов // Автомобиль. Дорога. Инфраструктура. 2020. № 4(26). С. 33–52.
- Шухман С.Б., Соловьев В.И., Прочко Е.И. Теория силового привода колес автомобилей высокой проходимости. Москва: Агробизнесцентр, 2007. 333 с.
- Бояршинов М.Г., Задворнов В.Ю., Кочетков А.В., Янковский Л.В. Анализ риска буксования при проезде эксплуатируемого участка проезжей части в снежном накате // Грузовик. 2022. № 7. С. 25–30.
- Shukhman S.B., Vantsevich V.V. Wheel-vehicle-step obstacle interaction // Advanced Autono-mous Vehicle Design for Severe Environments, 2015. P. 116–133.
- Круташов, А.В. Новый метод расчёта динамики разгона автомобиля // Автомобильная промышленность. 2022. № 3. С. 4–9.
- Фатеев А.В., Виноградов В.С. О рациональном распределении касательных сил тяги между движителями тягача и прицепа // Задачи и возможности международного трансфера инновационных технологий: Сборник статей Международной научно-практической конференции, Маг-нитогорск, 02 марта 2023 года. Уфа: ООО «ОМЕГА САЙНС», 2023. С. 20–23.
- Дмитриева Т.Д., Котков А.С., Васильев А.А., и др Исследование взаимодействия колеса с опорным основанием // Инженерный вестник Дона. 2023. № 1(97). С. 214–222.
- Павлов В.В., Кувшинов В.В. Теория движения многоцелевых гусеничных и колесных машин: учеб. для вузов. Чебоксары: ООО «Чебоксарская типография № 1», 2011. 424 с.
- Efimov A.V. Mathematical Model for Assessing Selection of the Interaxle Drive Type // Journal of Machinery Manufacture and Reliability. 2018. Vol. 47, No. 1. P. 89–95. DOI: 10.3103/S1052618817060073.
- Hu J., Weng L. L., Qin X. Z. [et al.] Mileage Prediction of Electric Vehicle Based on Multi Model Fusion // Jiaotong Yunshu Xitong Gongcheng Yu Xinxi. 2020. Vol. 20, No. 5. P. 100–106. DOI: 10.16097/j.cnki.1009-6744.2020.05.015.
- Wang J., Gao S., Wang K. [et al.] Wheel torque distribution optimization of four-wheel inde-pendent-drive electric vehicle for energy efficient driving // Control Engineering Practice. 2021. Vol. 110. P. 104779. DOI: 10.1016/j.conengprac.2021.104779.
- Zhou Z., Chen Z., Zhai W. [et al.] Dynamic performance of locomotive electric drive system under excitation from gear transmission and wheel-rail interaction // Vehicle System Dynamics. 2021. DOI: 10.1080/00423114.2021.1876887.
- Liu D., Huang S., Wu S., Fu X., Direct Yaw-Moment Control of Electric Vehicle With in-Wheel Motor Drive System // International Journal of Automotive Technology. 2020. Vol. 21, No. 4. P. 1013–1028. DOI: 10.1007/s12239-020-0096-6.
- Jung H., Pyun B., Choi S. Model Predictive Control of an All-Wheel Drive Vehicle Considering Input and State Constraints // International Journal of Automotive Technology. 2020. Vol. 21, No. 2. P. 493–502. DOI: 10.1007/s12239-020-0046-3.
- Khan M. A., Aftab M.F., Ahmed E., Youn I. Robust Differential Steering Control System for an Independent Four Wheel Drive Electric Vehicle // International Journal of Automotive Technology. 2019. Vol. 20, No. 1. P. 87–97. DOI: 10.1007/s12239-019-0008-9.
- Wong A., Kasinathan D., Khajepour A., Chen S. K., Litkouhi B. Integrated torque vectoring and power management framework for electric vehicles// Control Engineering Practice, 2016, vol. 48, pp 22–36.
- Abishev K., Assylova K., Kassenov A., & Baltabekova A. (2023). Determination of the value of tangential force for the half-track traction vehicle with rubber tracks // Journal of Applied Engineer-ing Science. 2023. Vol. 21(2). Р. 411–417.
- Nussupbek Z.T., Bekenov T.N., Sattinova Z.K., Beisenbi M.A., Tassybekov Z.T. Substantiation of methods for calculation of traction forces redistribution indicators on modular front and rear wheels of the vehicle (4Х4) // Transportation Engineering. 2023. Vol. 13, number 100193.
- Ghodrati M., Ahmadian M., Mirzaeifa R. Studying the Effect of Tangential Forces on Rolling Contact Fatigue in Rails Considering Microstructure // ASME/IEEE Joint Rail Conference. 2019. Vol. 58523. P. V001T10A003
- Janulevicius A., Pupinis G., Juostas A. Mathematical description of tractor slippage with varia-ble tire inflation pressure // Engineering for rural development: 17th international scientific conference proceedings. 2018. Vol. 17. P. 405–411.
