Механические модели в стабилометрии

Автор: Кручинин П.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (64) т.18, 2014 года.
Бесплатный доступ
Приводится описание упрощенных моделей стабилометрических измерений. Для описания движений человека приняты традиционные модели. Движение в сагиттальной плоскости описывается моделью перевернутого маятника. Движение во фронтальной плоскости описывается упрощенной моделью трехзвенника, два звена которого параллельны и опираются на пол. Эти звенья моделируют ноги, а третье звено моделирует туловище, руки и голову, которые не меняют взаимного расположения. Звенья соединены шарнирно в тазобедренных суставах. Предполагается, что плита стабилоанализатора (стабилографа) представляет собой недеформируемое твердое тело. Эти модели используются для выражения показаний стабилоанализатора через углы наклона тела и моменты в голеностопном и тазобедренном суставах. Их приближенный анализ показывает, что изменения сагиттальной и фронтальной координат центра давления в наибольшей степени характеризуют изменение моментов в голеностопном и тазобедренном суставах соответственно. Полученная оценка справедлива для произвольных по темпу движений человека и позволяет объяснить «ухудшение устойчивости» у некоторых больных в процессе реабилитации. Предполагается, что такой эффект связан с тем, что в начале реабилитационного периода у указанных пациентов ослаблена мышечный система, и нервная система осуществляет стабилизацию вертикальной позы меньшими усилиями. В ходе реабилитации мышечная система восстанавливается, и пациент может затрачивать большие усилия на стабилизацию вертикальной позы.
Описание движений человека, модель удержания вертикальной позы, стабилометрия, голеностопный и тазобедренный суставы, коррекция формы ног
Короткий адрес: https://sciup.org/146216134
IDR: 146216134 | УДК: 531.391:612.76
Текст научной статьи Механические модели в стабилометрии
Одним из основных инструментов постурологии служит стабилометрическая платформа. Такая платформа имеет датчики силы, которые измеряют только вертикальные компоненты усилий. Вместе с компьютерным комплексом преобразования и обработки сигналов такая платформа образует стабилоанализатор (стабилограф).
Механические модели удержания человеком вертикальной позы строились уже на самых ранних стадиях развития стабилометрии. В литературе известна интерпретация результатов исследования удержания человеком вертикальной позы на основе модели перевернутого маятника [3, 18]. Для описания фронтальных движений корректнее использовать более сложные модели. Обзор различных задач удержания человеком вертикальной позы на основании механических моделей приведен в диссертациях [4] и [14]. Подобные модели используются для обсуждения результатов стабилометрических исследований. Изложение вопроса о связи этих моделей
Кручинин Павел Анатольевич, к.ф.-м.н., доцент кафедры прикладной механики и управления, Москва с показаниями стабилоанализатора часто бывает недостаточно аккуратным и содержит неточности. Необходимую аккуратность выводов позволяет сделать механический анализ, основанный на исследовании физической модели. Подобный анализ частично проведен в статье [16], однако указанная работа практически недоступна и известна в основном по ссылкам. В то же время популярные издания, посвященные анализу стабилометрических исследований [2, 13, 15], не рассматривают этот вопрос, что в ряде случаев затрудняет понимание и интерпретацию результатов стабилометрических исследований. В связи с вышеизложенным представляется полезным подробное изложение и анализ соотношений указанной механической модели.
Не описывая подробно принципов работы стабилометрической платформы, укажем, что основной информацией, которая выдается программным обеспечением стабилоанализатора, являются фронтальная x s и сагиттальная y s координаты точки O n приложения равнодействующей N сил вертикальных реакций, действующих в опорах платформы, а также величина этой равнодействующей.
Рассмотрим описание малых колебаний человека относительно положения равновесия в окрестности вертикальной позы. В этом случае углы отклонения от вертикали сегментов тела человека допустимо считать малыми и рассматривать задачи анализа колебаний в сагиттальной и фронтальной плоскостях раздельно, не учитывая влияния крутильных колебаний вокруг вертикальной оси. Такой подход традиционен и применяется во всех цитируемых в этой статье источниках.
Модель движений в сагиттальной плоскости
Задача описания движений человека в сагиттальной плоскости рассматривалась многократно. Однако при ее анализе часто опускают некоторые особенности, связанные с пренебрежением при моделировании малыми параметрами. В связи с этим обсудим здесь аккуратное обоснование этой традиционной модели.
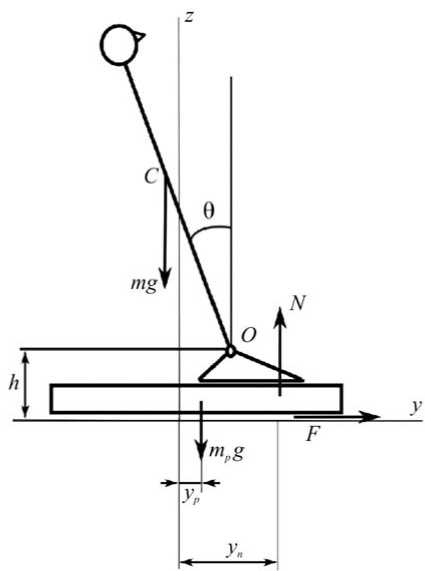
Для описания колебаний человека в сагиттальной плоскости примем традиционную модель перевернутого маятника, изображенную на рис. 1. Традиционно предполагаем, что тело человека в ходе теста допустимо моделировать недеформируемым стержнем массой m , закрепленным шарнирно в точке O , соответствующей голеностопному суставу. В более сложном случае антропоморфного многозвенника такая модель будет описывать наиболее значимую – первую – форму колебаний [9, 14].
Центр масс стержня расположен в точке C , удаленной от точки O на расстояние lc . Момент инерции стержня относительно фронтальной оси, проходящей через точку О , равен J . Отклонение стержня от вертикали опишем углом θ. Будем считать, что обследуемый ориентирован так, что сагиттальная плоскость человека параллельна оси чувствительности платформы, а его стопа неподвижна относительно платформы.
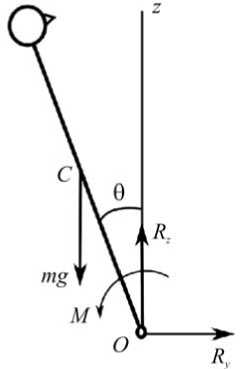
Уравнения движения для малых значений угла θ и скорости его изменения запишем из уравнений плоскопараллельного движения тела [1] в соответствии со схемой рис. 1, б :
ml c 9 =- R y ,
< 0 = R z - mg , (1)
_ J 9 = ml c g 9 + M x .
Третье уравнение этой системы полностью описывает движение тела человека и традиционно используется для описания движения:
9 = ml c g 9 + M x . (2)
JJ
а
б
в
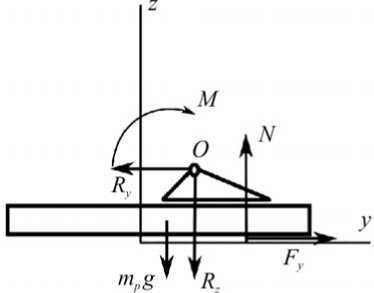
Рис. 1. Модель движений человека в сагиттальной плоскости. Внешние силы, действующие: a – на систему человек – платформа; б – на модель стержня, имитирующего тело человека; в – на систему стопы ног – платформа стабилоанализатора
Для записи соотношений для сагиттальной стабилограммы рассмотрим равновесие системы платформа – стопа под действием силы тяжести m p g этой системы, составляющих N и F y равнодействующей сил в опорах, реакций R y и R z связи в голеностопном суставе и момента M x мышц в голеностопном суставе, приложенных как показано на рис. 1, в .
Уравнения равновесия этой системы имеют вид
[ F y - R y = 0.
• N - R z - m p g = 0, (3)
_ Ny n + F y h - M x - m p gy p = 0.
где y n – сагиттальная координата центра давления; h – расстояние от точки О до плоскости, образованной чувствительными элементами сенсоров; y p – координата центра масс объединенной системы.
Выражение для измерений стабилоанализатора получим, преобразовав уравнения систем (1) и (3):
Ny n = M x - F y h + m p gy p
= M 1 + x
mlch
^^^^^^^e
J
m 2 glc 2 h J
9 + m p gy p •
Для грубой оценки предполагаем, что момент инерции J можно приближенно считать равным моменту инерции стержня длиной 2 l c , что соответствует известным антропометрическим данным [6]:
I 1 3h
Ny„ = Mx 1+ 77
4 l
mgh
-7- 9 + m p gy p •
Таким образом, переменная составляющая сагиттальной стабилограммы совпадает с переменной составляющей величины
s
M x
। m„ mg 1 +— p
m
3 h
4 l
h l c θ .
m
4 1 + - p l c
m J
c
В этом соотношении lc θ – расстояние вдоль оси y от оси голеностопного сустава до проекции центра масс человека.
Чтобы сравнить слагаемые в соответствии с теорией размерностей [8, 12],
M приведем это соотношение к безразмерному виду, перейдя к переменным 5 M = —— , M x *
y θ
5 y = — и 59 = —. В качестве характерных значений 9 * , у* и M * примем величину y * θ *
амплитуды изменения угла θ, отклонение y* центра давления и модуль момента в голеностопном суставе при равновесии системы 9 = 9*:
= l c 9 * и M * = mgl c 9 * .
Для этих переменных выражение (4) примет вид
3 h
1+
4 l
5у =----- m
-
1 + - p m
5 M, - x
h
c
m
-
4 1 +
V m )
δθ.
Учитывая соотношения, бесспорно выполняющиеся для взрослых обследуемых, mp h
—- << 1 и — << 1 и отбросив постоянные слагаемые, получим основное соотношение m lc переменной составляющей сагиттальной
5у = 5Mx, которое для размерной стабилограммы эквивалентно выражению
A y
A M x
,
mg где AMx - изменение момента в голеностопном суставе.
mp h
Это соотношение выполняется с погрешностью порядка max < —-, — > для m L
c
любых по темпу движений. Таким образом, сагиттальная стабилограмма в большей степени описывает нормированное изменение момента в голеностопном суставе. Погрешность этого представления для человека среднего телосложения не превышает 10%.
Модель движений во фронтальной плоскости
Как отмечалось еще в работе [3], простая модель перевернутого маятника не описывает полностью удержание человеком вертикальной позы во фронтальной плоскости. Наличие двух опор во фронтальной плоскости и незначительные величины фронтальных моментов, развиваемых мышцами в голеностопном суставе, существенно меняют механическую схему, которую необходимо использовать при моделировании движения. Эта схема зависит от постановки ног [4, 5]. При постановке единственной ноги на платформу стабилоанализатора изменение фронтальной стабилограммы, аналогично модели измерений в сагиттальной плоскости, описывает фронтальный момент в голеностопном суставе [4].
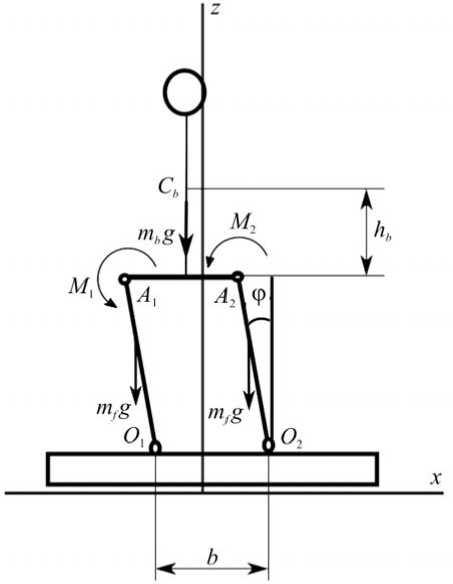
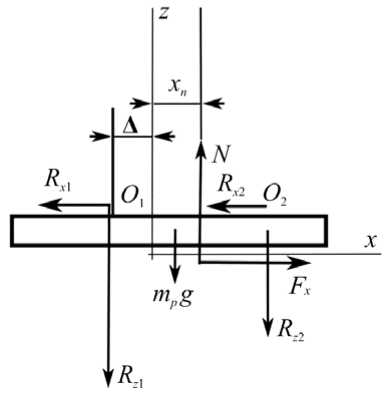
При установке обеих ног на платформу стабилоанализатора задача существенно усложняется. Для упрощения рассмотрим только один случай движения человека, когда ступни располагаются под тазобедренными суставами. Будем считать, что опора ноги о плоскость точечная и центры тазобедренных суставов A 1 , A 2 и точки опоры ног О 1 , О 2 образуют параллелограмм, как показано на рис. 2. Такое положение приближенно соответствует позе «ноги на ширине плеч».
Пусть M1 и М2 – моменты, создаваемые мышцами в правом и левом голеностопных суставах соответственно; l – «длина ноги» OiAi; mb – масса туловища с головой и руками; mf – масса одной ноги, т.е. масса человека m = mb + 2mf.
Примем гипотезу из работы [4] о том, что удержание позы во фронтальной плоскости осуществляется за счет мышц тазобедренного сустава. В качестве обобщенной координаты выберем угол φ, образованный ногой O i A i с вертикалью.
б
а
Рис. 2. Модель движений человека во фронтальной плоскости. Активные силы, действующие в системе человек – платформа ( a ), и внешние силы, действующие на платформу стабилоанализатора ( б )
Уравнения движения такой системы запишем с помощью уравнения Лагранжа [1]. Кинетическая энергия системы имеет вид
T = 2 JJL + ml, 22
где J f – момент инерции ноги относительно сагиттальной оси, проходящей через точку O i , а v b – скорость центра масс «туловища».
Используем для вычисления моментов инерции J f соотношения для моментов инерции стержня. Тогда для малых значений угла φ
T = | m f + m b 1 2ф2. I 3 2 J
Обобщенную силу в этих же предположениях запишем в виде
Q = ( mb + mf ) gl ф + M 1 + M2.
Тогда уравнение движения системы с использованием уравнения Лагранжа запишем в виде
Ф =
m g ф +
2l mb + 3 mf
M 1 + M 2
Ё2 m b + 3 m f 1 1
Это уравнение приближенно описывает движение стоящего человека во фронтальной плоскости и имеет тот же вид, что и уравнение (2), описывающее движение в сагиттальной плоскости.
Для выражения фронтальной составляющей стабилограммы потребуются данные о горизонтальных Rx 1 , Rx 2 и вертикальных Rz 1 , Rz 2 составляющих реакции опорной поверхности. Для их отыскания воспользуемся теоремой о движении центра масс системы, показанной на рис. 2, a , в проекциях на горизонтальную и вертикальную оси:
mf v 1 + m f v2 + mbV b = - Rx 1 - Rx 2 ,
0 = Rz 1 + Rz2 -(mb + 2mf ) g, и теоремой об изменении кинетического момента [1] этой системы относительно точки O1:
^d^ ( Kb + Kf i + Kf 2 ) = ^ Mmg + ^ Mr , где v1 и v2 – горизонтальные составляющие скорости центров масс ног; vb – скорость поступательного движения, совершаемого туловищем; Kb, Kf1, Kf2 – кинетические моменты каждого из тел системы относительно фронтальной оси, проходящей через точку O1; E Mmg, E mr - суммы моментов сил тяжести и реакций связей относительно фронтальной оси, проходящей через точку O1.
С учетом малости угла φ, скорости и ускорения его изменения запишем эти соотношения в линеаризованном виде:
( m b + m f ) l ф = - R x 1 - R x 2 ,
■ 0 = Rz 1 + Rz 2 - ( m b + 2 m f ) g ,
2 ,A mb (l + hb) + 3 mfl 1lФ = — (mb + 2 mf) gb + (mb + mf) glФ + 2 Rz 2 b, где hb
высота центра масс «туловища» над тазобедренными суставами; b – расстояние O1O2.
Из двух последних уравнений системы (8) и уравнения (7) выразим вертикальные реакции опорных поверхностей в виде
( m b + 2 m f ) g ф A 2 ,2 Az x g/ ф
R, = --------------mJ (l + h,) +—mJ +(m, + mf\---, z 1 2 2 b ( b b 3 f J b f) 2 b
( m b + 2 m f ) g ф A 2 a Az \gl ф
R.^ = ---------- —I-- mJ ( l + h ) + — mJ -I mh + mf)--- .
z 2 2 2 b ( 3 f J V b f’ 2 b
Показания стабилоанализатора выразим из этих реакций, рассматривая уравнения равновесия платформы для схемы, представленной на рис. 2, б , так же, как и для сагиттальных колебаний
Уравнения равновесия имеют вид
' F x - R x 1 - R x 2 = 0,
< N - Rz 1 - R z 2 - m p g = 0, (10)
Nx + Fh - R Д- R ?(A + 2 b)-m gx = 0, n x p z 1 z2 pO p , где xn – фронтальная координата центра давления; Fx – проекция реакций опор платформы на горизонтальную ось фронтальной плоскости; hp – расстояние от точки Оi до плоскости, образованной чувствительными элементами сенсоров платформы; Δ – фронтальная координата точки O1 в осях стабилоанализатора (на рис. 2, б изображено отрицательное значение параметра Δ).
Используем эти соотношения и выражения (8)–(9) для того, чтобы получить выражение для измерений стабилоанализатора в виде
Nxn =( mb + 2 mf) g (b + A) + mpgxp-(mb + mf) gl Ф + mb ( b + hp ) + 3 mfl + ( mb + mf ) hp lФ •
Выразим угловое ускорение из (7) и нормальную реакцию с помощью вторых уравнений систем (8) и (10), а также используем соотношение для масс (6). Отбросив постоянные слагаемые, получим соотношение для величины x s , изменение которой описывает переменную составляющую фронтальной стабилограммы:
xs
mlg
A M h


( m - 2 m f ) hb + ( m - m f ) hp
m — m

m — m
- 1
A
1 -
mf "
m v
l φ,
где A M -
–
изменение суммарного момента в тазобедренных суставах,
а
mf
1-- — l ф - фронтальное перемещение центра масс.
m )
Выражение (11) для
фронтальной составляющей содержит «хороший» малый
hp параметр —p«1 и
mf отношение *0,2, которое также в первом приближении m
можно считать малым.
h
Пренебрегая этими величинами и учитывая, что -р < 0,5, получим грубую оценку для
величины x s в виде
AM. L - | , xs * 1 1 + 1 + hb ф .
mg V l J
Чтобы сравнить слагаемые в соответствии с теорией размерностей [8, 12],
A M приведем это соотношение к безразмерному виду, перейдя к переменным о M =---- ,
M *
5 x s = -xs- и 5ф = —. В качестве характерных значений ф * и M * примем величину l φ * φ *
амплитуды изменения угла φ и модуль момента в тазобедренном суставе, которое обеспечивает равновесие системы при ф = ф * .
M * = ( m - mf ) gl ф * * mgl ф * .
Для этих переменных выражение (12) примет вид
( кА к
5 x * 5 M I 1 + h b | + h b 5ф .
s I l l
h
Поскольку b- < 0,5, вклад изменения момента в тазобедренном суставе по крайней мере втрое превышает вклад прочих факторов. Таким образом, и фронтальную координату центра давления также можно использовать для грубой оценки изменений момента в тазобедренном суставе.
Обсуждение
Итак, в силу принятых предположений колебания во фронтальном и сагиттальном направлениях управляются группами мышц тазобедренного и голеностопного суставов соответственно.
Несмотря на значительные различия в структуре механической схемы для сагиттальных и фронтальных движений, приближенные уравнения (2) и (7), описывающие эти движения, однотипны. Постоянные времени для этих уравнений
имеют вид
T = 1-^- и T =А s 3g f
m b + 3 m f l m b + m f g
.
В соответствии с данными [6] для человека ростом 1,7 м эти постоянные времени близки по величине и приближенно составляют 0,16 и 0,2 с. Таким образом, уравнения, описывающие удержание человеком вертикальной позы, совпадают с уравнениями колебаний активно стабилизируемого перевернутого маятника с небольшой асимметрией свойств во фронтальном и сагиттальном направлениях.
Соотношения (4) и (11) для изменения сагиттальной и фронтальной стабилограмм совпадают по форме. Однако весовой вклад слагаемых, определяемых положением центра масс и моментом в суставе, в них различен. Если для сагиттальных колебаний показания стабилоанализатора в соответствии с (5) хорошо отображают изменение момента в голеностопном суставе, то для фронтальной плоскости подобное утверждение носит сильно приближенный характер. Тем не менее в первом приближении стабилограмму целесообразно рассматривать как измерение нормированной величины моментов. Погрешности такого представления вряд ли сильно превышают погрешности определения центра масс человека в результате приближенных громоздких процедур, описанных в [17]. Отметим, что приведенная оценка справедлива для произвольных движений человека, в то время как оценки для движения центра масс часто справедливы только для медленных составляющих, характерных для спокойного стояния.
Такой подход позволяет объяснить, например, «ухудшение устойчивости» у некоторых больных в процессе реабилитации и части космонавтов в ходе послеполетной реабилитации (см., например, [10, 11]). С этим же фактором связаны проблемы использования стабилоанализатора при анализе движений [7].
Можно предположить, что такой эффект связан с тем, что в начале реабилитационного периода у указанных пациентов ослаблена мышечная система, а нервная система, хотя тоже возможно «разбалансирована», но адаптируется быстрее и в итоге осуществляет стабилизацию вертикальной позы меньшими усилиями. В ходе реабилитации мышечная система восстанавливается, и пациент может позволить затрачивать большие усилия на стабилизацию вертикальной позы, так как минимизация суммарных моментов в суставах, в соответствии с гипотезой из работы [3], не является главной целью системы управления вертикальной позой человека.
Благодарности
Работа выполнена при поддержке Российского фонда фундаментальных исследований (грант 12-01-00839).
Список литературы Механические модели в стабилометрии
- Бухгольц Н.Н. Основной курс теоретической механики. -М.: Наука, 1972. -Ч. II. -332 c.
- Гаже П.М., Вебер Б. Постурология. Регуляция и нарушения равновесия тела человека/Санкт-Петербург. мед. акад. последипломного образования. -СПб., 2008. -314 c.
- Гурфинкель В.С., Коц Я.М., Шик М.Л. Регуляция позы человека. -М.: Наука, 1965. -256 с.
- Денискина Н.В. Фронтальная устойчивость вертикальной позы человека: дис. … канд. биол. наук. -М., 2009. -122 с.
- Денискина Н.В., Левик Ю.С., Гурфинкель В.С. Сравнительная роль мышц голеностопного и бедренного суставов в регуляции позы человека во фронтальной плоскости при стоянии//Физиология человека. -2001. -Т. 27, № 3. -С. 66-70.
- Зациорский В.М., Аруин А.С., Селуянов В.Н. Биомеханика двигательного аппарата человека. -М.: Физкультура и спорт, 1981. -143 с.
- Карими М.Т. Оценка достоверности временных и основанных на колебаниях центра давления характеристик при анализе устойчивости стояния во время выполнения различных упражнений//Российский журнал биомеханики. -2010. -Т. 14, № 3 (49). -C. 79-84.
- Новожилов И.В. Фракционный анализ. -М.: Изд-во МГУ, 1995. -224 с.
- Новожилов И.В., Терехов А.В., Забелин А.В., Левик Ю.С., Шлыков В.Ю., Казенников О.В. Трехзвенная математическая модель для задачи стабилизации вертикальной позы человека//Математическое моделирование движений человека в норме и при некоторых видах патологии. -М.: Изд-во МГУ, 2004. -C. 7-20.
- Пурахин Ю.Н., Какурин Л.И., Георгиевский B.C., Петухов Б.Н., Михайлов В.М. Регуляция вертикальной позы после полета на кораблях «Союз-6 -Союз-8» и 120-суточной гипокинезии//Космическая биология и медицина. -1972. -Т. 6, № 6. -С. 47-53.
- Савельев М.Ю. Физиологическое обоснование стабилометрии в оценке статического равновесия у детей младшего школьного возраста в норме и при нарушениях двигательной функции: автореф. дис.. д-ра мед. наук. -Архангельск, 2005. -19 с.
- Седов Л.И. Методы подобия и размерности в механике. -М.: Наука, 1977. -440 с.
- Скворцов Д.В. Клинический анализ движений. Стабилометрия. -М.: Антидор, 2000. -188 c.
- Терехов А.В. Математическое моделирование регуляции позы человека: дис. … канд. физ.-мат. наук. -М., 2007. -147 с.
- Усачев В.И. Стабилометрические параметры. -Таганрог: Ритм, 2011. -29 c.
- Gurfinkel E.V. Physical foundations of stabilography//Agressologie. -1973. -Vol. 14 (Spec. No. C). -P. 9-13.
- Lafond D., Duarte M., Prince F. Comparison of three methods to estimate the center of mass during balance assessment//Journal of Biomechanics. -2004. -Vol. 37. -P. 1421-1426.
- Nashner L.M. Sensory feedback in human posture control: science degree thesis. -Cambrige, 1970. -198 p.
