Мехатроника и робототехника как инновационное звено в развитии инженерного и медицинского образования

Автор: Овсяницкая Лариса Юрьевна, Юрасова Екатерина Валерьевна
Рубрика: Управление в социально-экономических системах
Статья в выпуске: 3 т.15, 2015 года.
Бесплатный доступ
В настоящее время мехатроника и робототехника играют огромную роль в развитии современной медицины. Главной целью развития медицинской робототехники является высокая точность и качество обслуживания, повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. Однако, несмотря на достижения техники и технологий, специалисты здравоохранения не всегда осведомлены о них, а инженеры не имеют полной информации о потребностях современной медицины. Авторами проведен критический анализ специфических особенностей сферы здравоохранения и инженерии в области, связанной с взаимодействием с мехатроникой и робототехникой. Выявлены причины возникновения сложившейся ситуации и предложены пути решения проблемы. Для достижения поставленной цели был проведен анализ законодательных и нормативно-правовых документов в сфере развития науки и технологий, стратегии развития медицины, использованы методы анализа теоретических и практических предпосылок использования мехатроники и робототехники как инновационного звена в развитии медицине и инженерии. Предложены педагогические пути решения описанного парадокса путем корректировки подходов к ведению занятий на циклах повышения квалификации специалистов здравоохранения и инженеров. Изложены факты реальной действительности, которые составляют основу практических действий, связанных с проведением междисциплинарных исследований. Даны рекомендации для обеспечения более высокого уровня взаимодействия специалистов здравоохранения и инженеров-робототехников. Определены причины возникновения низкого взаимодействия специалистов здравоохранения и инженеров-робототехников при решении междисциплинарных задач. Предложены педагогические пути решения данной проблемы. По итогам исследования авторы делают вывод о том, что причиной недостаточно плотного взаимодействия специалистов здравоохранения и инженеров-робототехников является изолированность специалистов различных областей знаний, отсутствие необходимого информационного обеспечения инновационных проектов и отсутствие межведомственного планирования рыночно ориентированных исследований и анализа прогнозной маркетинговой информации и четкой стратегии коммерциализации.
Мехатроника, робототехника, компьютерные технологии, специалисты здравоохранения, бионический подход, повышение квалификации
Короткий адрес: https://sciup.org/147155047
IDR: 147155047 | УДК: 621.865.8 | DOI: 10.14529/ctcr150314
Mechatronics and robotics as an innovative element in the development of the engineering and medicine education
Currently, mechatronics and robotics play a huge role in the development of modern medicine. The main purpose of the medicine robotics is the high accuracy and quality of service, efficiency of treatment, reducing the risk of harm to human health. However, despite advances in engineering and technology, health specialists are not always aware of them, and engineers do not have full information concerning the needs of modern medicine. The authors carried out a critical analysis of specific features concerning healthcare and engineering in the field related to the interaction with mechatronics and robotics. Identified the causes of the situation and proposed the ways to solve the problem. The law documents in the field of science, technology and strategy of medicine development were done to achieve this goal, used the methods of analysis of theoretical and practical preconditions of use of mechatronics and robotics as an innovative element in the development of medicine and engineering. Pedagogical solutions of described paradox by adjusting approaches in giving classes on cycles of health professionals’ and engineers’ training are proposed. The facts of reality, which form the basis for action related to the interdisciplinary research are presented. Recommendations to ensure a higher level of interaction between health professionals and engineers robotics are given. The cause of the low interaction between health professionals and engineers in solving interdisciplinary robotics tasks are determined. Pedagogical solutions to this problem are given. According to the research the authors conclude that the reason of not enough close cooperation between the healthcare specialists and robotics engineers is the isolation of different areas of knowledge specialists, lack of adequate information support innovative projects and the lack of interagency planning market-oriented research and analysis of predictive brand information and the lack of clear strategy for commercialization.
Текст научной статьи Мехатроника и робототехника как инновационное звено в развитии инженерного и медицинского образования
21 мая 2013 г. постановлением Правительства Российской Федерации № 426 утверждена Федеральная целевая программа «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014–2020 годы» [1], основная цель которой заключается в формировании конкурентоспособного и эффективно функционирующего сектора исследований и разработок в области прикладных исследований.
В Программе указано, что характерной чертой современного развития является переход к новому этапу формирования инновационного общества – построению экономики, базирующейся преимущественно на генерации, распространении и использовании знаний. Интенсификация производства и использование новых научно-технических результатов предопределило резкое сокращение инновационного цикла, ускорение темпов обновления продукции и технологий.
В качестве основных задач Программы указано создание опережающего научно-технологического задела межотраслевой направленности по приоритетам развития научно-технологи- ческой сферы, использующего результаты, полученные в рамках системы фундаментальных исследований, и востребованного отраслями экономики; обеспечение системного планирования и координации исследований и разработок на основе выстраивания системы приоритетов развития научно-технологической сферы, опирающейся на систему технологического прогнозирования и учитывающей приоритеты развития секторов экономики.
Авторы статьи более десяти лет принимают непосредственное участие как в практических разработках высокотехнологичной техники [2–4], так и в педагогической деятельности, направленной на подготовку инженеров и специалистов здравоохранения к работе с современными программно-аппаратными комплексами. За эти годы несколько раз произошла смена поколений компьютерной техники, технологий и устройств медицинского назначения. Это позволило авторам наблюдать динамику подготовки специалистов в области здравоохранения и инженерии в профильных вузах и сделать выводы о необходимости внедрения новых организационных и педагогических подходов в обучение.
Постановка задачи
В 90-е годы прошлого века информационные технологии становятся неотъемлемой частью деятельности специалистов здравоохранения, медицинская информатика является обязательным элементом образования врача.
В настоящее время в развитии науки происходят два взаимообратных процесса: с одной стороны, наблюдается дифференцирование наук, связанное с их все большей специализацией [5], с другой стороны – возникновение новых междисциплинарных направлений, являющихся результатом взаимного проникновения или симбиоза разных областей знания. Ярким примером являются медико-технические науки [6]. Действительно, анализ современных достижений в данной области показывает невозможность изолированного развития этих направлений, поскольку только их взаимодействие позволяет друг другу перейти на более высокий качественный уровень [7].
Технические науки, с одной стороны, предоставляют средства для получения новых знаний в медицине, с другой стороны, они сами являются предметом научных исследований. В качестве примеров можно привести разработку новых архитектур компьютеров и алгоритмов обработки данных (нейрокомпьютеры и нейроалгоритмы) и развитие интеллектуальных систем принятия решения, в основе которых лежат принципы работы мозга, создание роботизированных систем, имитирующих биомеханические объекты [8, 9], и многое другое.
Таким образом, мы приходим к выводу о том, что в современной науке никакие характеристики процессов, явлений или свойства предметов нельзя изучать изолированно, поскольку невозможно провести четкую грань между тем, где заканчивается сфера одной науки и начинается область другой науки.
Однако на сегодняшний день, несмотря на высокие достижения в области разработки инновационных объектов медицины и технологий, существуют серьезные проблемы, не позволяющие быстро вовлекать их в научный и хозяйственный оборот.
Проблема заключается в том, что врачи часто не осведомлены о возможностях, которые стали доступны в последнее время разработчикам лечебного и диагностического оборудования, а инженеры, в свою очередь, не всегда знают о потребностях врачей [10]. Причиной указанного парадокса является изолированность специалистов различных областей знаний, объективные трудности (финансовые, организационные), не позволяющие им принимать непосредственное участие в научно-практических конференциях по тематикам других наук, где обсуждаются перспективные направления данной области знаний, отсутствие необходимого информационного обеспечения инновационных проектов.
Причинами несвоевременного информирования и взаимного внедрения технологий также являются отсутствие межведомственного планирования рыночно ориентированных исследований, большая часть которых в настоящее время сохраняет узкую специализацию, не отвечает требованиям инвестиционной привлекательности, не содержит анализа прогнозной маркетинговой информации и четкой стратегии коммерциализации [11]. Как следствие, множество идей, интересных решений и оригинальных разработок мехатроники в наиболее «критических» областях современной науки и технологии, до сих пор не востребованы к внедрению в других областях, поскольку об этих разработках информирован лишь узкий круг специалистов [12].
Мехатроника и робототехника в развитии современной медицины
28 декабря 2012 г. распоряж ением Правительства Российской Федераци и была утверждена Стратегии развития медицинско й науки в Российской Федерации на период до 2025 года [13]. Целью Стратегии является разв итие медицинской науки, направленное на с оздание высокоте х нологичных инновационных пр одуктов, обеспечивающих на основе трансф ера инновационных техно логий в практическое здрав оохранение сохранение и укрепление здоров ья населения.
Стратегия направлена на ре ализацию государственной политики в сфер е здравоохранения, повышение качества и доступн ости медицинской помощи населению Росс ийской Федерации, включа я разработку инновацион ной продукции, освоение критически важны х технологий и ра з витие компетенций. Для достиже ния поставленных целей предусмотрено реш ение задач развития системы экспертизы (обоснова нного выбора) перспективных и приорите тных направлений, о ценки качества и результативно сти научных исследований и создание услов ий для устойчивого спроса на инновационную проду кцию и ее внедрения в практическое здравоо хранение.
Мехатроника и робототехника – это направления, включающие в себя комплекс идей, метод ов и средств для создания информационно -управляемых и программируемых механических систем с заданными функциями [14]. Это системные мировоззренческие на учные дисциплины, составляющие основы автоматиз ации любых объектов жизнедеятельности че ловека, и в этой свя зи они должны являться предмет ом изучения практически всех специальносте й.
Мехатроника традиционно воспринимается как часть общего с робото техникой образов ательного процесса, которая официально зафиксирована в перечнях учебных направлений. Однако точнее считать мехатронику и р обототехнику самостоятельными дисциплин ами, имеющими о б щую подобласть в виде робото технических систем и их компонентов, исп ользующих близкие принципы, методы проектирования и исследования [12].
Мехатроника предусматривает объединени е механики, электроники и информатики (рис. 1, а). Результатом этого союза станов ится появление интеллекта и синергического эффекта, что пока зано в [15]. Междисциплинарный характер мехатроники наглядно демонстрируе т логотип (рис. 1, б), предложенный МИРЭА.

а)
Рис. 1. Логотипы мехатроники (а) и ее междисциплинарного характера (б)
Электромеханические
Датчики
Моделирование систем системы

Симуляций компьютерное управление
Микроконтроллеры
б)
Правительством РФ принято решение о форсировании работ в области р обототехники, нар я ду с которой существенную рол ь в развитии техносферы играет мехатроника , являющаяся прио ритетным направлением развити я науки и техники, определяющим уровень п роизводства, конк у рентоспособность продукции, ка чество жизни, обороноспособность и безопа сность государства. В 2002 г. президентом Российско й Федерации В.В. Путным утверждены «Осн ов ы политики РФ в области развития и технологии на период 2010 г. и в дальнейшей перспект иве» [15], где мех а тронные технологии включены в число критических технологий.
Принципиальной для мехатроники является интеллектуализация как отдельных функциональных компонентов, так и общесистемных функций, что соответствует общетехническим тен- денциям. Успехи в области мехатроники, микро- (нано-) процессорной техники и информационных технологий приводят к необходимости разработки и создания нового типа систем обработки информации и управления – интеллектуальных [4]. Этот тип систем особенно важен в мехатро-нике, поскольку полезный приспособительный эффект является определяющим в любой функциональной системе, так как способствует достижению цели, которая выступает в том числе как системообразующий фактор. Усложнение решаемых задач, обеспечение высокой точности и надежности работы потребовало новых подходов к построению мехатронных систем, обеспечивающих гибкую обработку информации в условиях ее неполноты и противоречивости, принятия решения, синтеза и коррекции цепи, сложного воздействия окружающей среды [14].
Поскольку гибкая обработка информации и управление выходит за пределы традиционных подходов, то можно указать некоторые области исследования новых функций, а именно: распознавание и понимание разного рода информации типа рисунков, звуков речи и символьной информации, присущие естественным языкам; вывод и решение задач с помощью баз знаний, которые допускают прямую обработку информации и обладают способностью к обучению и самоорганизации; управление и автоматическое управление в интеллектуальных системах, функционирующих в реальном времени.
В настоящее время роботы играют колоссальную роль в развитии современной медицины. Медицина становится одним из главных векторов внедрения роботов и искусственного интеллекта. Главной целью развития медицинской робототехники является высокая точность и качество обслуживания, повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека.
Условно медицинских роботов можно классифицировать:
-
- роботизированные хирургические системы, применяемые для проведения сложных хирургических операций [16]. Данные системы не относятся к полностью автономным устройствам, но дистанционное управление инструментом обеспечивает врача точностью и повышенной управляемостью, дополнительной механической силой, уменьшает утомляемость хирурга, снижает риск инфицирования врача и пациента:
-
- роботы-симуляторы пациентов [17, 18], предназначенные для отработки навыков принятия решений и практических врачебных интервенций в лечении патологий. Роботы воспроизводят физиологию человека, моделирует клинические сценарии, реагируют на введение препаратов, анализируют действия обучаемых и соответствующим образом реагируют на клинические воздействия;
-
- экзоскелеты и роботизированные протезы, состоящие из механико-электрических элементов, микроконтроллеров с искусственным интеллектом, способные управляться от нервных окончаний человека [19];
-
- роботы для медицинских учреждений и роботы-помощники, являющиеся альтернативой медицинскому персоналу [20], которые обеспечивают уход за пациентом, помогая в реабилитации и обеспечивая постоянную связь с врачом;
-
- нанороботы – микророботы [21, 22], действующие в организме человека на молекулярном уровне.
На рис. 2 представлены примеры медицинских роботов: хирургический робот (рис. 2, а), реабилитационный робот (рис. 2, б) и робот удалённого присутствия для проведения консультаций с пациентом на расстоянии (рис. 2, в). Иллюстрации представлены на сайтах , и
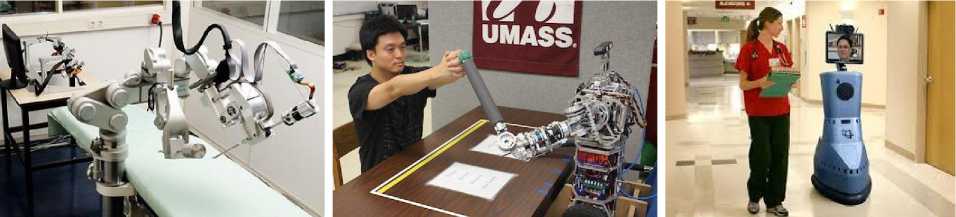
а) б) в)
Рис. 2. Примеры медицинских роботов
В работе [23] приведен анализ тенденций развития мехатроники и робототехники на фоне общих тенденций развития техники в целом. На основе бионического подхода, то есть подхода, при котором для получения хороших решений исследователи берут у живой природы удачные, жизнеспособные идеи, которые являются результатом длительной эволюции [24], выделены пять основных принципов развития мехатроники и робототехники:
-
- системный подход к созданию техники, унификация функциональных компонентов (биологическим аналогом является клеточное строение);
-
- интеграция функций на базе однородных структур (биологический аналог – нейронные структуры, пронизывающие все органы живых существ);
-
- поэтапность миниатюризации техники путем последовательного освоения разного порядка размерностей в виде отдельных ее поколений. Этот принцип непосредственно вытекает из естественного процесса непрерывного совершенствования технологий в направлении повышения точности. Каждое поколение любого вида техники требует соответствующих новых технологий. При этом для реализации последних необходимо технологическое оборудование, основанное на технике предыдущей размерности;
-
- создание в рамках искусственного интеллекта саморазвивающихся систем и техническое освоение неформализуемых (творческих) способностей человека.
Таким образом, понимая роль мехатроники и робототехники как неотъемлемой составляющую развития медицины и роль медицины в развитии мехатроники и робототехники, мы предположили, что педагогический подход к обучению врачей и инженеров в связанных областях также должен строиться на основе взаимодействия этих наук.
При проведении занятий в рамках повышения квалификации как специалистов здравоохранения, так и инженеров, возникает ситуация, при которой обучаемые и преподаватель становятся практически равноправными участниками образовательного процесса. В том случае, когда проводятся занятия у специалистов здравоохранения, преподавателем является специалист в области информатики и техники. Где в реальных условиях он может узнать о современных потребностях медицины в различных областях? Только у слушателей циклов повышения квалификации, представляющих различные регионы и отрасли медицины.
В том случае, когда проводится повышение квалификации у специалистов, связанных с разработкой современной техники, необходимо приглашение биологов или биомехаников, которые, в процессе проведения занятия, и сами узнают немало нового о текущих достижениях в области науки и техники.
Выводы
-
1. Одним из главных факторов, влияющим на инновационное развитие медицинской робототехники, является глубокая информированность специалистов здравоохранения и инженеров-робототехников во взаимных потребностях и современных достижениях.
-
2. Необходимо привлечение специалистов здравоохранения на циклы повышения квалификации инженеров-робототехников и инженеров – на курсы последипломного обучения врачей. Правильно сформированная структура занятий позволит обучаемым, узнав о новых возможностях изучаемой науки, способствовать (используя свои административные и профессиональные возможности) внедрению в практику здравоохранения методов, устройств и технологий; быть компетентными специалистами, то есть не только владеть современными средствами преобразования информации и информационными технологиями, но и обладать эрудицией, позволяющей применять указанные устройства и технологии для решения любых возникающих на практике задач, в том числе в условиях неопределенности и с использованием интеллектуальных и эвристических методов.
-
3. Результатом обучения с привлечением внешних специалистов является инициирование научных исследований в своей области, способствующей глобальной цели: прогрессу науки в целом.
Список литературы Мехатроника и робототехника как инновационное звено в развитии инженерного и медицинского образования
- Постановление правительства России от 21.05.2013 г. № 426 «О Федеральной целевой программе «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014-2020 годы». -http://www.fcpir.ru/participation_in_ program/formation_topics/resolution/
- Analog-to-Digital Converters of the Components of a Displacement with the Use of Microelectronic Sine-Cosine Magnetic Encoders/Yu.S. Smirnov,T.A. Kozina, E.V. Yurasova, A.V. Sokolov//Measurement Techniques. -2014. -Vol. 57, iss. 1. -P. 41-46.
- Повышение эффективности формирования эквивалентов составляющих перемещения/Ю.С. Смирнов, Д.А. Кацай, Е.В. Юрасова, И.С. Никитин//Материалы конференции «Информационные технологии в управлении» (ИТУ-2014). -СПб.: ОАО «Концерн «ЦНИИ «Электроприбор», 2014. -С. 710-719 с.
- Смирнов, Ю.С. Полифункциональный фазовый преобразователь перемещения/Ю.С. Смирнов, Е.В. Юрасова, Т.А. Козина//XII Всероссийское совещание по проблемам управления ВСПУ-2014. -М.: ИПУ им. В.А. Трапезникова РАН. 2014. -С. 7171-7182. -http://vspu2014.ipu.ru/proceedings/prcdngs/7171.pdf
- Викторов, В.А. Направления, принципы интеграции медицинских и технических наук/В.А. Викторов, C.B. Селищев, М.Б. Штарк//«БИОМЕДПРИБОР-2000»: материалы конф. -М., 2000. -http://www.mks.ru/library/conf/biomedpribor/2000/plen04.html (дата обращения 27.02.2015).
- Викторов, В.А. О развитии медико-технической науки/В.А. Викторов//Вестник РАМН. -2000. -№ 10. -С. 18-24.
- Овсяницкая, Л.Ю. Применение андрагогического подхода как общенаучной основы формирования информационной компетентности специалистов системы здравоохранения/Л.Ю. Овсяницкая//Вестник Томского государственного университета. -2015. -№ 390. -C. 194-201.
- Смелягин, А.И. Моделирование структуры роботов и манипуляторов/А.И. Смелягин, Е.В. Бабенко//Вестник Нижегородского университета им. Н.И. Лобачевского. -2011. -№ 4-2. -С. 315-317.
- Загорулько, Ю.А. Моделирование робота, управляемого речевыми сигналами/Ю.А. Загорулько//Известия Томского политехнического университета. -2011. -№ 5. -С. 98-102.
- Овсяницкая, Л.Ю. Юниарный подход в преподавании информатики и информационных технологий специалистам системы здравоохранения/Л.Ю. Овсяницкая//Фундаментальные исследования. -М.: ИД «Академия естествознания», 2013. -№ 4, ч. 2. -С. 448-452.
- Куракова, Н.Г. Управление инновационным потенциалом медико-биологических исследований: дис. … д-ра биол. наук/Н.Г. Куракова. -М., 2006. -284 с.
- Особенности информационного обеспечения безредукторных электромехатронных преобразователей/Ю.С. Смирнов, Д.А. Кацай, Т.А. Функ, Я.О. Анисимов//Материалы конференции «Информационные технологии в управлении» (ИТУ-2014). -СПб.: ОАО «Концерн «ЦНИИ «Электроприбор», 2014. -С. 729-737 с.
- Распоряжение Правительства РФ от 28.12.2012 № 2580-р «Об утверждении Стратегии развития медицинской науки в Российской Федерации на период до 2025 года». -http://government.ru/docs/7257/
- Смирнов, Ю.С. Электромехатронные преобразователи/Ю.С. Смирнов; под ред. А.Л. Шестакова. -Челябинск: Издат. центр ЮУрГУ, 2013. -360 с.
- Основы политики Российской Федерации в области развития науки и технологий на период до 2010 года и дальнейшую перспективу. (Утверждены Президентом РФ 30 марта 2002 г. № ПР-576). -http://archive.kremlin.ru/text/docs/2002/03/30293.shtml
- Гуськов, А.М. Численное моделирование операции стернотомии с помощью хирургического робота-манипулятора при движении по заданной траектории/А.М. Гуськов, М.С. Кузнецова//Наука и образование: электрон. науч.-техн. изд. -2013. -№ 5. -С. 145-162. -http://technomag.bmstu.ru/doc/599870.html
- Назаренко, К.А., Модель робота-симулятора безусловных рефлексов новорожденного/К.А. Назаренко, Е.С. Дубинина, А.А. Чередников//Вестник медицинских Интернет-конференций. -2014. -№ 5. -С. 692. -http://medconfer.com/node/3601
- Низовибатько, О.Б. Медицинские симулятивные центры -перспектива практического здравоохранения/О.Б. Низовибатько//Вестник Тамбовского университета. Серия: Естественные и технические науки. -2013. -№ 1. -С. 311-312.
- Арзамасцева, Т.А. Экзоскелеты: новинка военного дела и медицины/Т.А. Арзамасцева, С.М. Постников//Современные наукоемкие технологии. -2014. -№ 5-2. -С. 80.
- Первичный опыт использования роботов в повседневной клинической практике в РФ/Д.В. Иванов, А.Н. Лищук, А.Н. Колтунов, А.Н. Корниенко//Вестник новых медицинских технологий. -2010. -№ 4. -С. 175-176.
- Войтович, И.Д. Основные принципы изготовления медицинских нанороботов/И.Д. Войтович, А.И. Золот, Н.И. Ходаковский//Математические машины и системы. -2010. -№ 2. -С. 122-133.
- Хадарцев, А.А. Разработка и использование нанотехнологий в медико-биологических исследованиях/А.А. Хадарцев, В.А. Хадарцев//Вестник Росздравнадзора. -2010. -№ 3. -С. 63-67.
- Евтеева, Е.В. Задачи и закономерности развития мехатроники и робототехники/Е.В. Евтеева//Вестник Волжского университета им. В.Н. Татищева. -2009. -№ 14. -С. 86-90.
- Ёлкин, С.С. Бионический подход при создании комплекса моделей нейронов/С.С. Ёлкин, С.В. Ёлкин, Э.С. Клышинский//Институт прикладной математики им. Келдыша. -http://www.agpl.ru/bionic-neural-nets/publ-bionic-nets/48.html (дата обращения 27.02.2015).
