Метод интегральных преобразований в решении задачи обнаружения малогабаритных транспортных средств на изображениях

Автор: Клячин А.А., Клячин В.А.
Журнал: Математическая физика и компьютерное моделирование @mpcm-jvolsu
Рубрика: Моделирование, информатика и управление
Статья в выпуске: 4 т.27, 2024 года.
Бесплатный доступ
В статье предложен способ формирования набора признаков на изображениях, основанный на трех интегральных преобразованиях - преобразование Радона, функции Стеклова и преобразование Фурье. С помощью дискретного аналога этих преобразований вычисляются значения, которые образуют набор признаков. В зависимости от параметров преобразований количество признаков можно изменять. Нами выбраны значения этих параметров таковыми, что количество признаков равно 903. Показано использование данного подхода при решении задачи обнаружения малогабаритных, а значит слабо заметных, транспортных средств на видеоснимках. Помимо этого, нами разработан улучшенный вариант метода наименьших квадратов, основанный на обработке полученных признаков с помощью некоторых преобразований меток обучающего набора изображений. Основная суть этого метода состоит в том, чтобы выполнить аффинное преобразование значения метки в некоторую малую окрестность ее первоначального значения. Априорные оценки показывают уменьшение погрешности аппроксимации с использованием метода наименьших квадратов. В работе также показано сравнение разработанного подхода со сверточными нейронными сетями. Данное сравнение позволяет сказать, что он им не сильно уступает по такому показателю, как процент правильных предсказаний. При этом, по времени выполнения предсказания представленный в статье метод работает в 3-4 раза быстрее в зависимости от используемой модели. В практической части работы были использованы программные средства библиотек OpenCV, Keras и Scikit-learn.
Классификация изображений, интегральные преобразования, метод наименьших квадратов, сверточная нейронная сеть, пространство признаков, модель классификации, компьютерное зрение
Короткий адрес: https://sciup.org/149147558
IDR: 149147558 | УДК: 519.688 | DOI: 10.15688/mpcm.jvolsu.2024.4.3
Method of integral transformations in solving the problem of detecting small vehicles in images
The article proposes a method for forming a set of features on images based on three integral transformations: the Radon transform, the Steklov function and the Fourier transform. Using a discrete analog of these transformations, the values that form a set of features are calculated. Depending on the transformation parameters, the number of features can be changed. We selected the values of these parameters such that the number of features is 903. The use of this approach in solving the problem of detecting small-sized, and therefore poorly visible, vehicles in video images is shown. In addition, we have developed an improved version of the least squares method based onprocessing the obtained features using some transformations of the labels of the training set of images. The main essence of this method is to perform an affine transformation of the label value into a small neighborhood of its original value. A priori estimates show a decrease in the approximation error using the least squares method. The paper also shows a comparison of the developed approach with convolutional neural networks. This comparison allows us to say that it is not much inferior to them in such an indicator as the percentage of correct predictions. At the same time, in terms of prediction execution time, the method presented in the article works 3-4 times faster depending on the model used. In the practical part of the work, software tools from the OpenCV, Keras and Scikit-learn libraries were used.
Текст научной статьи Метод интегральных преобразований в решении задачи обнаружения малогабаритных транспортных средств на изображениях
DOI:
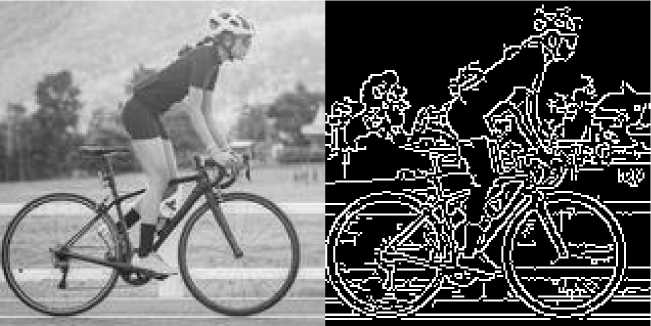
Научный центр безопасности дорожного движения при Министерстве внутренних дел Российской Федерации провел очередной информационно-аналитический обзор дорожно-транспортной аварийности в РФ за шесть месяцев 2023 г. . В своем отчете ведомство привело статистику по аварийности, которая связана с популярными на сегодняшний день средствами индивидуальной мобильности, такими как электрические самокаты и велосипеды.
За первое полугодие 2023 г. зарегистрировано 2 151 (+8,6 %) ДТП с пострадавшими велосипедистами, в которых погибли 89 (-29,4 %) и получили ранение 2 072 (+11 %) велосипедиста. Доля таких происшествий среди всех ДТП составила 3,8 %, что выше, чем в первом полугодии 2022 г. (3,7 %). Тяжесть последствий данных ДТП составила 4,1.
Нужно отметить, что велосипедист на проезжей части не редко представляет собой мало заметный объект, к тому же движущийся намного медленнее, чем движется поток машин. Следовательно, было бы весьма полезно иметь некоторое дополнительное устройство, предназначенное для отслеживания таких малогабаритных участников движения. В первую очередь для такого устройства потребуется соответствующее программное обеспечение. Следует сразу уточнить, что данное программное обеспечение должно работать почти в режиме реального времени, что накладывает на него определенные требования по скорости обработки видеокадров.
В настоящей работе мы предлагаем собственный подход к решению поставленной задачи. Именно, определяем набор специальных признаков на изображении, вычисление которых основано на ряде интегральных операторов, а также разрабатываем метод обработки полученных признаков с помощью некоторых преобразований меток обучающего набора изображений.

Рис. 1. Показатели аварийности с пострадавшими велосипедистами
1. Общая идея метода
В задачах компьютерного зрения чаще всего используют два подхода. Первый основан на заранее известной информации об объектах, которые изображены на снимках: это может быть их форма (используется контурный анализ), цветовой тон (используются различные методы цветовой фильтрации) и т. д. В этом случае для выделения и распознавания объектов применяются базовые алгоритмы обработки изображений [5]. Другой подход основан на применении методов машинного обучения, что предполагает выделение некоторых признаков, характеризующих изображенные объекты (см., например, [2; 6–8; 13; 15; 17; 18; 21]. Процесс обучения на достаточно большом наборе входных изображений позволяет определить наиболее характерные признаки, присутствующие в данном наборе. В следующих работах можно познакомиться как с задачами, решаемыми при помощи сверточных нейронных сетей, так и с их архитектурой [1; 3; 4; 12; 14; 16; 19; 20]. К примеру, в статье [10] инструмент нейронных сетей использовался в задаче пространственной реконструкции объектов на основе ряда его изображений. Нами в работе представлен иной подход вычисления признаков, основанный на различных интегральных преобразованиях. В частности, мы применяем идеи, опирающиеся на три интегральных преобразования: преобразование Радона [22], функции Стеклова [11] и дискретное преобразование Фурье [5].
Наш подход предполагает вычисление ряда числовых признаков для изображения с помощью определенных интегральных преобразований.
Для произвольной функции z = f (х,у) , определенной на плоскости (х, у) , полагаем
+ ∞
R(r, ф) = У f (г cos ф + t sin ф,г sin ф — t cos ф}И, -∞ где г > 0 и ф Е [0, 2п). Полученная функция R(r, ф) есть интеграл по всем прямым плоскости, которые описываются уравнениями х = г cos ф + t sin ф, у = г sin ф — t cos ф, t Е (-ж, +ж).
Полученная функция R(r, ф) называется преобразованием Радона функции f (х,у). Нужно отметить, что при определенных условиях на функцию f (х,у) она однозначно восстанавливается по ее преобразованию Радона. Если f (х,у) задает яркость точки (х,у) на изображении, то вместо интегралов по всем прямым будем рассматривать среднюю яркость по всем вертикальным, горизонтальным и диагональным линиям, то есть вычислять среднюю яркость по строкам, столбцам и диагоналям изображения. При этом подходе мы теряем часть информации. Однако, это вполне допустимо, так как при решении задач классификации изображений нет необходимости их полного восстановления.
Помимо преобразования Радона мы будем использовать оператор осреднения Стеклова В.А. (функции Стеклова). Для заданной функции z = f(х,у) и h > 0 по- лагают
x + h/ 2 y + h/ 2 f h (x,y) = — J j f(u,v)dvdu. x - h/ 2 y - h/ 2
Таким образом, f h (x,y) есть среднее значение функции f (х,у) в квадрате [х — h, ,х + + h ] х [у — h ,у — h ] . Известно, что для непрерывной функции f(х,у) семейство функций f h (x,y) равномерно сходится к исходной функции на компактных множествах при h ^ 0 . Для случая изображений мы заменим интегралы на суммы и результат такого преобразования будем рассматривать в отдельных точках. В итоге получим следующую конструкцию. Разбиваем входное изображение на блоки пикселов и в каждом блоке вычислим среднее значение яркости. Полученный набор значений записываем в отдельный массив. Здесь также происходит потеря информации и восстановить по этим данным изображение невозможно. Однако эти потери вполне допустимы при решении задач распознавания объектов на изображении, что будет показано в следующих разделах статьи.
Любое изображение размера Nc х Nr в оттенках серого цвета можно считать функцией двух переменных f (х,у) как функцию яркости точки (х,у), где х — номер столбца и у — номер строки. Введем обозначения sy(х) = j r
Nr
Nc
• 12f ( х,у), S X( у) = w • f ( х,у).
N С
У =0
Дугими словами, S y (х) — средняя яркость пикселов изображения f , расположенных в столбце х , S y (у) — средняя яркость пикселов изображения f , расположенных в строке у . Помимо этого, рассмотрим средние яркости, вычисленные по диагональным направлениям. Предположим, что N r = N c (в алгоритме мы все изображения приводим к квадратному виду). Пусть
1 У 1 Nr - 1
D y (у) = • ^f ( у — х,х\ D y ( у) = —--^f (N r — 1 + у — х,х ) , (2)
у+ 1 Х=0 Nr— у где у = 0,1, 2,...,Nr — 1. Функции Dy1_ (у) и D, (у) представляют собой средние значения яркостей точек, расположенных по диагоналям. Для вычисления средних значений яркости точек, расположенных на диагоналях другого направления, достаточно транспонировать матрицу изображения и воспользоваться формулами (2).
С определенной точностью введенные величины Sy(х), SX(у), Dy(у) и Dy(у) аппроксимируют (суммирование ведется только по вертикальным, горизонтальным и диагональным прямым) преобразование Радона изображения f. Поэтому, можно попытаться использовать их в задачах классификации изображений. Исходное изображение мы разбиваем на 4 равные части и данные вычисления выполняем для каждого из них. В итоге получаем, что количество признаков К = 4Nr + 3Nr.
Как уже было сказано, помимо преобразования Радона мы используем функции Стеклова. Для случая изображений определим их так. Зададим натуральное число q = = 2к + 1 , к = 0,1, 2,... , и для каждой точки (х,у) , х = к, к + q,..., k + [N r /q]q — q, у = = к, к + q, ...к + [N r /q]q — q , положим
1 к к
A q ( Х,У)= 2£ ^ + ( Х + КУ + V).
q и = - ки = — к
Данная величина определяет осредненное изображение. При этом A q (х,у) = f (х,у) когда q = 1 ( к = 0 ). На рисунке 2 можно видеть результат такого преобразования. Заметим, что общие очертания изображенного велосипедиста легко угадываются, что дает возможность использования полученных признаков в задачах классификации.

Рис. 2. Исходное изображение и изображение признаков S q( х,у )
Добавив эти значения, получим уже К = 7N r +
( ^ ) 2
признаков.
На рисунке 3 видим результат этих преобразований. После этого изображение разбивается на блоки размера q х q. В каждом таком блоке формируется набор светлых точек в виде массива, содержащего пару [х{,у{], где у^ — номер строки и Х{ — номер столбца г-ой светлой точки. Затем этот набор точек аппроксимируется прямолинейным отрезком, который описывается уравнением у = а • х + Ь. Параметры а, b вычисляются методом наименьших квадратов a =
г гг г^х* - Erf • Е vi i=1________i=1i гг r E J - E xi)
i=i \i=i/
ь =1 r
t *
\ i=1
— a •
t ^, i =1 /
где r — количество светлых точек в блоке.
Данные величины могут служить признаком на изображении, так как эти отрезки приближают набор белых точек в блоке (рис. 4). Получаем К = 7Nr + 3
( 7 ) 2
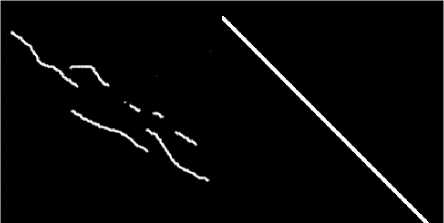
Рис. 4. Аппроксимация набора светлых точек прямолинейным отрезком
И, наконец, дополним вычисленные признаки коэффициентами дискретного преобразования Фурье, используя как действительную, так и мнимую части
1 Nc — 1 Nr -1 ( / Л
F (u,v) =
E E /(rfV)exP — ~Пт + *—\ ,
N г N c J00 JJ 1 \N C NJ J

Рис. 5. Исходная картинка и результат применения преобразования Фурье (8 х 8 коэффициентов)
При этом мы оставим только / 2 (I х I) комплексных коэффициента, находящихся в левом верхнем углу (для 0 < и < I и 0 < и < / ). В итоге для изображения будет сформирован набор из
К = 7N r + 3 ( N r ) + 2/ 2
числовых признаков, которые в дальнейшем будем использовать для решения задачи классификации. Далее опишем собственный подход к построению классификатора на основе метода наименьших квадратов.
2. Описание метода наименьших квадратов
Рассмотрим некоторое отображение f : R n ч R m , п , т > 0 , значения которого известны в конечном множестве точек X С R n
f(х г )= V i , г = 1,...,N, N = | X | .
Метод наименьших квадратов решает задачу поиска наилучшего линейного приближения отображения f в смысле минимизации величины
N
L(A) = ^ lAxi - yi |2 ч min, i=1
где минимум берется по всем матрицам A Е М т,п размерности т х п . Задача поиска этого минимума сводится к решению уравнения
-
V L(A) = 0.
Здесь градиент считается в пространстве М т,п со скалярным произведением
{ A, В ) = trA T B.
Представим множество X матрицей X Е М N п , а множество значений Y матрицей Y Е M N,m , располагая в строках координаты соответствующих точек
X ij = x j А = 1,..., N, j = 1, ...,п.
Y ij = y j ,г = 1, ...,N, j = 1, ...,m.
Градиент функции L(A) вычисляется исходя из формулы dL(H) = (УL(A\ Н) V H Е Мт,п.
N dL(H) = 2 £(Ax, - yi, Hx^ = i=1
N
= 2 ^(Axi ® Xi - yi ® Xi, H) = i=1
= 2 ( A • X T • X - Y T • X, H Y
Список литературы Метод интегральных преобразований в решении задачи обнаружения малогабаритных транспортных средств на изображениях
- Азаров, И. С. Сверточные нейронные сети для распознавания изображений / И. С. Азаров, А. С. Прокопеня // BIG DATA и анализ высокого уровня: сб. матер. VI Междунар. науч.-практ. конференции, Минск, 20-21 мая 2020 года. — Минск: Изд-во «Беспринт», 2020. — C. 271-280.
- Борзов, С. М. Классификация типов растительного покрова по гиперспектральным данным дистанционного зондирования земли / С. М. Борзов, О. И. Потатуркин // Вестн. Новосиб. гос. ун-та. Серия: Информационные технологии. — 2014. — № 12 (4). — C. 13-22.
- Васкан, В. Д. Обзор архитектур сверточных нейронных сетей для задачи классификации изображений / В. Д. Васкан // Электронный научнй журнал «ИТ-Стандарт». — 2021. — № 3. — C. 34-39.
- Голубков, А. М. Бинарная классификация изображений на примере задачи распознавания лиц / А. М. Голубков // Известия СПбГЭТУ «ЛЭТИ». — 2018. — № 7. — C. 26-30.
- Гонсалес, Р. Цифровая обработка изображений / Р. Гонсалес, Р. Вудс. — M.: Техносфера, 2005. — 1072 с.
- Гончарова, Е. Ф. Методы отбора признаков для задач классификации изображений земной поверхности / Е. Ф. Гончарова, А. В. Гайдель // Сборник трудов III международной конференции и молодежной школы «Информационные технологии и нанотехнологии». — Самара: Новая техника, 2017. — C. 535-540.
- Дорогов, А. Ю. Быстрая классификация JPEG-изображений / А. Ю. Дорогов, Р. Г. Курбанов, В. В. Разин // Интернет-математика 2005. Автоматическая обработка веб-данных. — 2005. — C. 147-172.
- Исследование эффективности классификации гиперспектральных спутниковых изображений природных и антропогенных территорий / С. М. Борзов, А. О. Потатуркин, О. И. Потатуркин, А. М. Федотов // Автометрия. — 2016. — № 52 (1). — C. 3-14.
- Воронина, В. В. Теория и практика машинного обучения: учебное пособие / В. В. Воронина. — Ульяновск: УлГТУ, 2017. — 290 с.
- Дряба, А. Ю. Построение 3D модели объекта по набору его изображений при помощи нейронной сети на базе алгоритма / А. Ю. Дряба // Математическая физика и компьютерное моделирование. — 2023. — Т. 26, № 4. — C. 31-42. — DOI: https://doi.Org/10.15688/mpcm.jvolsu.2023.4.1
- Жук, В. В. Аппроксимация функций и численное интегрирование / В. В. Жук, B. Ф. Кузютин. — СПб: Изд-во СПбГУ, 1995. — 352 с.
- : Abstract / Ministry of Science and Higher Education of the Russian Federation, Samara National Research University named after S. P. Korolev] Китаев, Д. Н. Сравнение сверточной нейронной сети и метода главных компонент в задаче классификации текстурных изображений / Д. Н. Китаев // LXVIII Молодежная научная конференция, посвященная 20-летию со дня начала эксплуатации Международной космической станции [Электронный ресурс]: тез. д / М-во науки и высш. образования Рос. Федерации, Самар. нац. исслед. ун-т им. С. П. Королева. — Самара: Изд-во «Самар. ун-т», 2018. — C. 88-89.
- Купенова, Э. М. Метод случайных лесов в задачах классификации спутниковых снимков / Э. М. Купенова, А. В. Кашницкий // Вестник ТвГУ. Серия «География и Геоэкология». — 2018. — № 3. — C. 99-107.
- Ле, М. Х. Сверточная нейронная сеть для решения задачи классификации / М. Х. Ле // ТРУДЫ МФТИ. — 2016. — № 8 (3). — C. 91-97.
- Морозова, И. В. Классификация размытых изображений и оценка параметров системы регистрации методами морфологического анализа / И. В. Морозова, А. И. Чуличков // Интеллектуальные системы. Теория и приложения. — 2005. — № 9 (1-4). — C. 321-344.
- Нежевенко, Е. С. Нейросетевая классификация гиперспектральных изображений на основе преобразования Гильберта — Хуанга / Е. С. Нежевенко, А. С. Феоктистов, О. Ю. Дашевский // Автометрия. — 2017. — № 53 (2). — C. 79-84.
- Осокин, В. В. О классификации изображений и музыкальных файлов / В. В. Осо-кин, Т. Д. Аипов, З. А. Ниязова // Интеллектуальные системы. Теория и приложения. — 2015. — № 19 (1). — C. 49-70.
- Пестунов, И. А. Классификация гиперспектральных изображений высокого пространственного разрешения / И. А. Пестунов, С. А. Рылов, П. В. Мельников // Журнал Сибирского федерального университета. Техника и технологии. — 2018. — № 11 (1). — C. 69-76.
- Сикорский, О. С. Обзор сверточных нейронных сетей для задачи классификации изображений / О. С. Сикорский, А. С. Прокопеня // Новые информационные технологии в автоматизированных системах. — 2017. — № 20. — C. 37-42.
- Солдатова, О. П. Применение сверточной нейронной сети для распознавания рукописных цифр / О. П. Солдатова, А. А. Гаршин // Компьютерная оптика. — 2010. — № 34 (2). — C. 252-260.
- Туркова, М. А. Корреляционные признаки для классификации текстурных изображений. / М. А. Туркова, А. В. Гайдель // Сборник трудов IV международной конференции и молодежной школы «Информационные технологии и нанотехнологии». — Самара: Новая техника, 2018. — C. 595-599.
- Deans, S. R. The Radon Transform and Some of its Applications / S. R. Deans, S. Roderick. —: New York: John Wiley & Sons, 1983. — 289 p.
