Метод касательного управления системой «хищник-жертва»

Автор: Кириллов А.Н., Иванова А.С.
Рубрика: Математическое моделирование
Статья в выпуске: 1 т.18, 2025 года.
Бесплатный доступ
Исследуемая модель представляет собой систему трех обыкновенных дифференциальных уравнений, два из которых - система Лотки - Вольтерра с изъятием особей популяции хищников, одно - дифференциальное уравнение относительно пищевой привлекательности участка. Решается задача сохранения видового состава биосообщества участка за счет изъятия особей популяции хищников. Доказано существование кривой, разделяющей множество, соответствующее всевозможным значениям начальных численностей популяций, на два: точками одного необходимо управлять для предотвращения миграции хищников, для точек другого множества управление не требуется. Проведено аналитическое и численное исследование кривой. Предложен метод касательного управления, позволяющий сохранить видовую структуру биосообщества участка. Построены процессы управления, соответствующие предложенному методу, из которых с помощью численного моделирования найден оптимальный, в смысле минимизации вмешательства в естественные процессы биосообщества и затрат на его реализацию.
Пищевая привлекательность участка, система лотки-вольтерра, динамическая система, процесс управления, численный метод
Короткий адрес: https://sciup.org/147248008
IDR: 147248008 | УДК: 517.977 | DOI: 10.14529/mmp250102
Method of tangential control of "Predator-prey" system
A researched model is actually a system of three ordinary differential equations, two of which are the Lotka-Volterra system where species of predator population are removed and the other one is a differential equation regarding trophic attractiveness of the patch. The problem of preserving diversity of biological society is solved by excluding predators. The existence of a curve dividing the multitude equal to various meanings of basic number of populations into two is proved: the points of the first are to be controlled in order to prevent predators' migration, the second set of points does not require control. Analytical and numerical researches of the curve have been conducted. A method of tangential control has been suggested as the one that allows to save the species structure of bio population on the patch. Control processes were constructed according to the suggested way, later the most effective one has been chosen with the help of numerical modelling in terms of its minimal invasion into natural processes of bio population and its expenses.
Текст научной статьи Метод касательного управления системой «хищник-жертва»
В работе рассматривается участок, содержащий популяцию жертв. Предполагается, что в некоторый момент времени на участке появляется популяция хищников. Появление хищников может быть естественным, как результат миграции в поисках ресурса питания, или искусственным – как результат его интродукции для борьбы с инвазивной популяцией жертв. Последнее является одним из методов борьбы с инвазивными видами [1]. Исследуемая модель представляет собой систему трех обыкновенных дифференциальных уравнений, два из которых относительно численностей популяций хищников и жертв, одно – относительно пищевой привлекательности участка. Впервые понятие пищевой привлекательности участка введено одним из авторов в работе [2]. Предполагается, что популяция хищников мигрирует с участка в случае его недостаточной пищевой привлекательности. Решается задача сохранения популяции хищников на участке за счет изъятия особей популяции хищников и перемещения их на другой участок. В предлагаемой статье развита тема работ [3, 4]. В работах [3, 4] задача сохранения видового состава биосообщества решается соответственно за счет постоянного и периодического/квазипериодического изъятия особей. В настоящей работе предлагается новый метод решения поставленной задачи – метод касательного управления, позволяющий сохранить видовую структуру участка при помощи изъятия особей популяции хищников на одном конечном временном промежутке. Этим представленная работа существенно отличается от работы [3], в которой для сохранения видов производится изъятие особей на бесконечном временном промежутке, и работ [4, 5], в которых подразумевается периодическое изъятие особей на конечных временных промежутках. Очевидно, метод касательного управления позволяет существенно снизить антропогенную нагрузку на биосообщество. Причем в отличии от работ [6, 7], в которых предложены методы оптимального управления, максимизирующие функцию полезности, но изрядно сокращающие численность популяций; лейтмотивом настоящей работы является сохранение видовой структуры биосообщества при помощи наименьшего вмешательства в его естественные процессы.
Доказано существование кривой, разделяющей множество, соответствующее всевозможным значениям начальных численностей, на два: точками одного из которых необходимо управлять для предотвращения миграции хищников, для точек другого множества управление не требуется, видовой состав сохраняется естественным образом. Проведено аналитическое и численное исследование данной кривой.
На основе метода касательного управления в работе построены процессы управления, сохраняющие видовую структуру биосообщества участка. Для реализации процессов используется численный метод, разработанный в [5]. Причем в [5] численный метод разработан для вычисления периода процесса управления, построенного в [4], а в настоящей работе этот метод применяется для нахождения временных промежутков изъятия особей процессов метода касательного управления. Также при помощи численного моделирования из построенных в работе процессов найден оптимальный в смысле минимизации затрат и вмешательства в естественные процессы биосообщества.
1. Модель и постановка задачи
Пусть х(і),у(і) - численные характеристики популяций жертв и хищников в момент времени t ^ 0 соответственно, причем t = 0 - время появления популяции хищников на участке, x 0 = х(0),у о = у (0) - начальные численности жертв и хищников соответственно. Будем считать, что хищники появляются на участке при выполнении условия Х о /у о > А , где 0 < А - заданная пороговая постоянная, характеризующая минимальное количество жертв, необходимое организму хищника в единицу времени для поддержания всех жизненных функций, то есть участок благоприятен для хищников в смысле объема пищевого ресурса, приходящегося на одного хищника. Пусть при t ^ 0 взаимодействие « хищник-жертва » задается системой Лотки - Вольтерра
Х = x(a — by ), у = y(kbx — m), (1)
где a – коэффициент прироста жертв в отсутствии хищников, bx – количество жертв, потребляемых одним хищником в единицу времени, k – доля полученной с потребляемой хищником биомассой энергии, которая расходуется им на воспроизводство, m – коэффициент смертности хищников в отсутствии жертв, причем, a, b, k, m считаются положительными постоянными ( k < 1 ). Учитывая поведение траекторий системы (1), можно заметить, что существует множество точек z o = (х о ,у о ) Е { х > Ау } таких, что положительные полутраектории с начальными точками z 0 переходят в область { х < Ау } , что вызывает тенденцию к миграции хищников c участка, в следствии недостатка пищи. Сделаем важное предположение. Очевидно, миграция хищников c участка не начинается мгновенно, то есть в такой момент времени t * > 0 , что x(t*)/y(t * ) = А , при условии x(t)/y(t) > А, t Е [0,t * ) . В течение некоторого времени, когда x(t)/y(t) < А , хищники будут оставаться на участке. Для моделирования инерционности начала миграции c участка в [2] предложено понятие пищевой привлекательности участка, а именно, величины n(t) , задаваемой выражением вида
t
t
/ х(т,х о ,у 0 ) А
(х(т, х о , у о ) — Ау (т, х о , у о )) dT = J у (т, х о , у о ) ( у (т x — ) — А] dT,
где (х(т,х о ,у о ),у(т,х о ,у о )) - решение системы (1), причем (х(0, х о , у о ), у(0,х о ,у о )) = z o и х о /у о > А . Величина n(t) характеризует накопление избытка (при
х(т,Х о ,уо)/у(т,Х о ,у о ) > А ) или недостатка (при x(т,x o ,y o )/y{т,Х o ,yo) < А ) пищи для хищников на промежутке [0,t] . Значимость рассмотрения величины отношения x/y при описании динамики популяций обоснована в [8]. Множитель y в подынтегральном выражении позволяет учесть объем популяции хищников.
Будем полагать, что все особи популяции хищников покидают участок в такой момент времени t = t , что x(t)/y (t) < А , n(t) = 0 , при условии n(t) > 0 , t Е (0, t) . Это предположение основано на принципе ≪ стада себялюбцев ≫ , предложенном в [9] для объяснения скопления особей во времени и в пространстве.
Итак, получаем систему трех обыкновенных дифференциальных уравнений, описывающую взаимодействие ≪хищник–жертва≫, хс = x(a — by), у = у (kbx — m), п = х — Ау
при условии n(t) А 0 , причем последнее уравнение системы получено дифференцированием (2).
В работе предполагается, что для предотвращения миграции хищников с участка производится изъятие некоторой части популяции хищников. Как известно, действия по изъятию широко практикуются для сохранения видовой структуры биосообщества. Пусть и Е { 0 }U R + - интенсивность изъятия хищников с участка, цель которого - сохранение условия n(t) > 0 для любого t > 0 . Описание и будет дано ниже. Тогда системы (1) и (3) примут соответственно вид
Хс = x(a — Ьу), у/= у (kbx — m — и) (4)
и
Хс = x(a — Ьу ), у = у (kbx — m — и), п = x — Ау
при n(t) А 0 . Пусть a(z 0 ,и) - траектория системы (4), проходящая через точку z 0 = (x 0 ,у 0 ) и являющаяся выпуклым овалом. В дальнейшем будем считать, что траектории a(z 0 ,u) вложены в R + х R и a(z 0 ,и) С п = { (z, 0) : z Е R + } , где z = (x,y) . Пусть r(t,M 0 ,и) = (x(t,M 0 ,и),у(к М 0 ,и),п(к М 0 ,и)) - решение системы (5), соответствующее управлению и , причем r(0, M 0 , и) = M 0 = (x 0 ,у 0 , 0) , r(M 0 , и) = { r(t, M 0 , u),t А 0 } - соответствующая траектория.
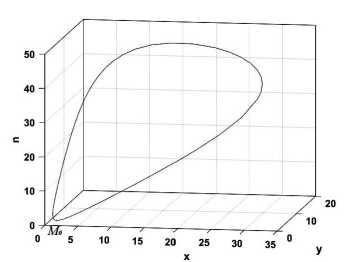
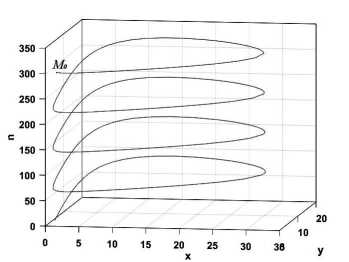
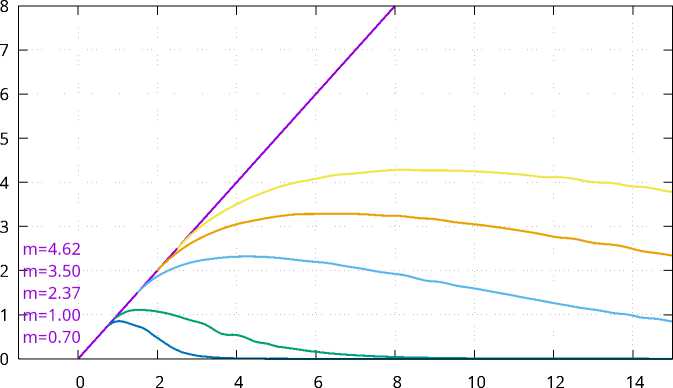
Поскольку правые части первых двух уравнений системы (5) не содержат переменную п, то траектории r(M0, и) системы (5) принадлежат цилиндрическим поверхностям S(a(z0,и)) с направляющими a(z0,u) и образующими, ортогональными плоскости {(x,y, 0)} (см. рис. 1). Таким образом, фазовое пространство системы (5) представляет собой дизъюнктное объединение инвариантных цилиндрических поверхно- стей
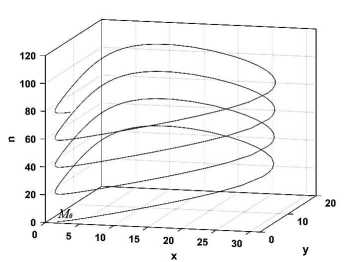
m + u λ < ak
А m+u ak
λ> m+u ak
Рис. 1. Траектории r(M 0 ,u) системы (5) в зависимости от значений параметров a, k, m, u, λ
Определение 1. Допустимым управлением будем называть кусочно постоянную функцию времени и : { 0 } U R + ^ { 0 } U R + , принимающую два значения 0 , и * > 0 . При этом количество переключений u с одного значения на другое не более двух и последнее значение равно 0 .
Смысл предлагаемого управления мотивируется двумя факторами: простотой практической реализуемости и возвратом фазовой точки на цилиндрическую поверхность S(a(z 0 , 0)) . Второй фактор объясняется желанием нанести меньший ущерб биосообществу, который вызван внешним вмешательством (управлением).
Постановка задачи. Для начальной точки M 0 = (— 0 ,y 0 , 0) , причем х 0 /у о > А , найти такое допустимое управление u , что:
1) n(t, M0, и) > 0 при t > 0;
2) n(t, Мо, и) > 0 при t > 0, и > 0.
2. Предварительные сведения
Замечание 1. Второе условие мотивируется тем, что в процессе управления пищевая привлекательность должна возрастать.
Ниже приведем некоторые свойства траекторий системы (5). Пусть T (z 0 ,u) — период решения (x(t, z 0 , и), y(t, z 0 , и)) системы (4). Обозначим A(t,M 0 ,u) = n(t + T (z 0 ,u),M 0 ,u) — n(t, М 0 ,и) .
Лемма 1. При любом t Е { 0 } U R +
A(M< 0 .u)= ' ( m^ - А ) . (6)
b ak
|
Доказательство. Обозначим для краткости T0 = T (z 0 ,u) . Переписывая в виде — = a — by, - = kbx — m — и, |
систему (4) |
|
и интегрируя на промежутке [0,T 0 ] , получаем |
|
|
f T0 тм - аТ0 f T0 ,и - (m + '“)Г 0 J 0 y(t)dt = b . /0 —(t)dt = kb . |
|
|
где для краткости (—(t),y(t)) = (—(t, z 0 , и), y(t, z 0 , и)) . Тогда |
|
|
A(t,M 0 ,и)= / (—(t) — Ay(t))dt — / (—(t) — Ay(t))dt = / (—(t) — J 0 Jo tt |
Ay (t)')dt. |
|
Учитывая Т 0 -периодичность подынтегральной функции, получаем |
|
|
A(t, М
0
, и) = /
T
0
(—(0
—
Ay(t))dt = |
— A ) • |
Замечание 2. Лемма 1 позволяет ввести обозначение A(t, М 0 ,и) = A(z 0 ,и) .
Следствие 1. Из (6) следует, что в зависимости от значения параметра λ возможно три случая:
n(t, M o , u) < n(t + T(z o , u), M o , u), если A < ma + u , n(t, M o , u) > n(t + T (z o , u), M o , u), если A > m+U , n(t, M o , u) = n(t + T(z o , u), M o , u), если A = ma + u .
Далее введем луч p = {(x,y, 0) : x = Ay} С п, который разбивает конус п на два открытых конуса: p+ = {(x,y, 0) : x > Ay} С п, p- = {(x,y, 0) : x < Ay} С п. Положение равновесия системы (4) имеет вид r=(m+ua ^ -7i где 0 C u — константа. Нетрудно показать, что включение R Е р+ равносильно условию A < m+u, R Е p- равносильно A > ma+u, R Е p равносильно A = m+U.
Очевидно, если A = m+ku , то при каждом соответствующем значении u > 0 и A > 0 найдется z o Е R ++ , при котором овал a(z o , u) имеет единственную общую точку с лучом p , а именно точку касания Q(u) = a(z o ,u) П p . Нетрудно показать, что
A(a + m + u) a + m + u
Q; 6(1 + kA) ,7b(r+kA)) . (8)
Уравнение траектории a(z o ,u) системы (4), проходящей через точку z o = (x o ,y o ) , имеет вид (при u = 0 см., например, [10])
f = f (x, y, x o , у о , u) = a In y — by + (m + u) In x — kbx — c = 0, (9)
где
c = c(x o ,y o ,u) = a In y o — by o + (m + u) In x o — kbx o .
3. Кривая l(u), аналитическое исследование
В дальнейшем, в настоящей статье, рассматривается случай, при котором на параметр λ наложено следующее ограничение
λ< m , ak
что, как отмечено выше, равносильно принадлежности равновесия R системы (1) области p + : R Е p + . Это объясняется существенным различием методов решения поставленной задачи управления при условии (10) и при A ^ m/(ak) . Экологический смысл условия (10) состоит в том, что хищнику для поддержания всех жизненных функций в единицу времени необходимо малое количество питательного ресурса (жертв).
Для системы (5) справедлив результат.
Лемма 2. Пусть A < m/(ak).
-
а) Пусть a(z o ,u) П p = { A, B } — такие точки, что x(A) < x(B). Тогда существует единственная точка C = C(a(z o ,u)) Е a(z o ,u) П p + , и соответствующий момент времени t(C ) > 0 такие, что:
al) r(t(C),C,u) = A Е (OQ(u)), где p D (OQ(u)) - открытый промежуток луча p;
-
a2) если M E (AC) E a(z 0 ,u) П p + , где (AC) — полуоткрытая дуга овала a(z 0 , и) с концами A и C, то n(t, M, и) > 0 для любого t > 0 ;
-
a3) если M E (CB) E a(z 0 ,и) П р + , где (CB) — открытая дуга овала a(z 0 ,u), то существует t(M ) > 0 такое, что при t E (0,t(M)) имеем n(t,M,u) > 0, при t = t(M) — n(t(M ),M,u) = 0.
-
b) Пусть a(z 0 ,u) П p = Q(u) или a(z 0 ,u) П p = 0 . Тогда n(t,M,u) > 0 для любых M E p + U { Q(u) } и t > 0 .
Замечание 3. Естественно, A и B - точки пересечения овала a(z 0 ,u) и луча p , как и точка C , зависят от овала a(z 0 ,и) . Для краткости используются обозначения, не подчеркивающие этот факт.
Доказательство. a1) Рассмотрим решение r(t,A,u) системы (5). Пусть t(BA) > 0 такой момент времени, что r( - t(BA), A, и) = B' = (x(B),y(B),n(B ‘ )) , причем n(t,A,u) > 0 для любого t E ( - t(BA), 0) . Заметим, что x(B) = Xy(B) x(A) = Xy(A) . Cуществование t(BA) следует из того, что n(0, A, u) = 0 , а фазовая точка, двигаясь по траектории r(A,u) , попадает в точку A из области { (x,y,n) : x < Xy } , в которой n(t) < 0 .
Пусть T(A,и) - период решения (x(t,A,u),y(t,A,u)) системы (4) и A ’ = r( - T(A, и), A, и) . Согласно лемме 1, n( - T(A, и), A, и) = n(0,A,u) — A(A,u) = 0 — A(A,u) < 0 .
Учитывая, что n( — t(BA), A,u) > 0 , получаем существование такого — t* E ( - T(A, и), — t(AB )) , что n( — t * , A, и) = 0 . Тогда, C = r( — t * , A, и) .
Утверждения a2), a3) леммы следуют из непрерывности и единственности решений.
Утверждение б) очевидно, поскольку n(t, M, и) > 0 для M = Q и n = 0 в точке Q .
□
Из леммы 2 следует существование кривой, принадлежащей π и имеющей единственную общую точку с каждой траекторией a(z o ,и) . Обозначим эту кривую 1(и) . Из леммы 2 следует, что 1(и) E p + . Кроме того, 1(и) примыкает к точке касания Q(u) .
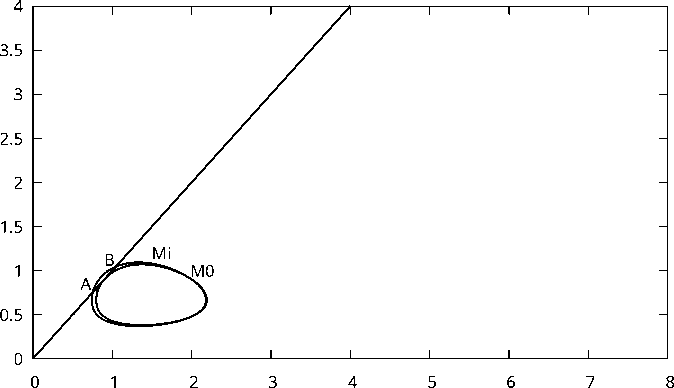
Кривая 1(0) разбивает область р + на два непересекающихся множества (см. рис. 2): p + = p + U p + U { 1(0) } , где p + - множество, снизу ограниченное положительной полуосью Ox , сверху - (OQ(0)) U l(0) , p + - множество, снизу ограниченное 1(0) , сверху - (Q(0) + то ) = { (x,y, 0) : x = Xy,x > x(Q(0)) } . Из леммы 2 следует, что если M o E p + , то управлять системой не требуется, то есть полагаем и = 0 для t ^ 0 . Управление требуется в случае M o E p ^ .В дальнейшем область p ^ будем называть областью ухода .
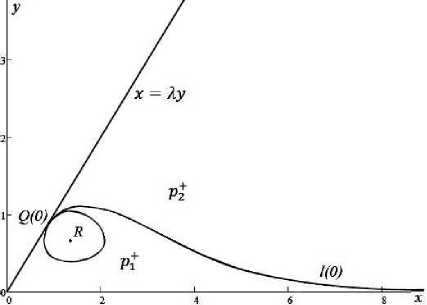
Рис. 2. График кривой 1(0) при a = 1, 0,b = 1, 5, k = 0, 5,m = 1, 0, X = 1, 0
Дадим аналитическое описание кривой l(0) = l . Пусть точка (x i , - i ) Е l , обозначим через t(x i ,y i ,- 1 ) время движения фазовой точки из (x i ,- i ) в точку A = (x 1 ,- 1 ) = (X- 1 ,- 1 ) Е (OQ(0)) (см. лемму 2). Для краткости t(x i ,y i ,y 1 ) = t l . Из (1) получаем
— = a — by, - = kbx — m.
Интегрируя последние равенства на промежутке [0,ti], получаем tl xdT = -1 fln -(ti) + mt\ , /tl ydT = 1 (ati — In xt).(11)
bk yl 0 bx
Очевидно, по смыслу tl , выполнено равенство tl
(x(t, Mi, 0) — X-(t, Mi, 0))dT = 0, где Mi = (xi,-i, 0). Подставив (11) в (12), получим
In — + Xk In —-1 + (m — XakF = 0.
yl
Подставив в (9) x 0 = x i ,y 0 = y i ,x = x 1 = Xy 1 , y = - 1 ,u = 0 , получим
(a + m)ln -i — (1 + kX)byi + (m In X — c(xi ,-i)) = g(-i,xi,-i) = 0.
При фиксированных x , y l уравнение (14) имеет два решения, меньшее из которых дает точку A (см. лемму 2). Пусть это решение y 1 = g(xi,y i ) , то есть A = (Xg(xi,y i ),g(xi,y i' )) . Подставляя - i = g(xi,- i ) в (13), получим
h(xi,y i' ) = (1 + Xk) ln g(xi,y i' ) — In y i — Xk In x i + (m — Xak)t i (xi,y i , g(xi,y i' )') + Xk In X = 0.
Итак, h(xi,y i ) =0 - уравнение кривой l .
4. Кривая l(u), численное исследование
Разработана программа для построения наименьшего сектора Sl, содержащего кривую l, при заданных значениях параметров a, b, k, m, λ (см. рис. 3). Для любой точки Qi = (x(Q) + ip, (x(Q) + ip)/X) Е (Q, +w), где Q = Q(0); i = 0,1, 2, 3,...; p > 0 поточечно строится траектория f (x,y, x(Qi),y(Qi), 0) = 0 путем разбиения отрезка [xmin,xmax] на d частей точками xj = xmin + j (xmax — xmin)/d и численного решения уравнения f (xj, y, x(Qi), y(Qi), 0) = 0 методом хорд для нахождения соответствующих xj значений -j, где xmin = min{x(t, Qi, 0) : 0 < t < T(Qi, 0)},xinax = max{x(t, Qi, 0) : 0 C t < T(Qi, 0)}, d - натуральное число, j = 0,d. Для каждой точки траектории (xj,-j) Е {(x,y) : f (x,y,x(Qi),y(Qi), 0) = 0,x > Xy} при движении от точки A к точке B против часовой стрелки с помощью метода, предложенного в [5], вычисляется значение интеграла
/о ( x (t
, x j ,- j , 0) — X - (t , x j , - j , 0))dT ,
где (x(0,x j ,- j , 0),y(0,x j ,- j , 0)) = (x j ,- j ),t 2 = max F , где
F = { t : t Е [0,T(Q i , 0)),x(t) = Xy (t) } .
Из леммы 7 ([2, стр. 329],) следует, что для любого i = 1,2,3,... найдется такой отрезок [x j * ,X j * +1 ] , что
Г2 (x(t,
X j * ,y j * , 0) - Ay(t,x j * ,y j * , 0))dT > 0,
/ ( x (t
, X j * +1 ,y j * +i , 0) - Ay(t, X j * +i ,y j * +1 , 0))dT < 0.
В силу непрерывности (15) по t 2 найдется такая точка C(x(C),y(C )) G { (x, y) : f (x,y,x(Q i ),y(Q i ), 0) = 0,x G [x j- * ,X j * +i ] } , что f t 2 (x(t,C, 0) - Ay(t,C, 0))dT = 0 . Обозначая через l + кривую, полученную объединением точек (x j * ,y j * ) , для которых интеграл (15) принимает последнее положительное значение, а через l - кривую, полученную объединением точек (x j * + 1 ,y j * + 1 ) , для которых интеграл (15) принимает первое отрицательное значение, получим сектор S l с вершиной в точке Q , ограниченный снизу кривой 1 + , сверху кривой l - (рис. 3), содержащий l . При d G то получим x j * ,x j * +1 G x(C ) и в качестве кривой l можно рассматривать l + или I — . Далее, для определенности, в качестве кривой l будем рассматривать l - . Поскольку l разбивает полуплоскость р + на два непересекающихся множества р + и р + , причем для предотвращения ухода популяции хищников точками р + нужно управлять, для точек р + видовой состав сохраняется естественным образом ( и = 0 для любого t ^ 0 ), то важно понимать, как изменяется кривая l , как следствие область ухода р + , при варьировании параметров модели. Проведем численное иccледование кривой l .
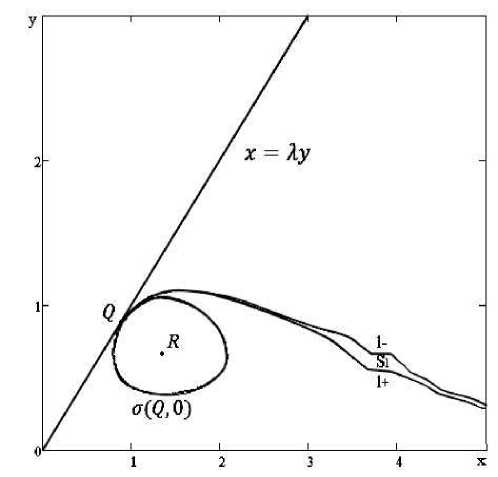
Рис. 3. Наименьший сектор S l , содержащий кривую l , при a = 1,0, b = 1,5, k = 0, 5,m = 1, 0,Л = 1, 0,d = 100, p = 0,1
Пусть начальные значения параметров a = 1, 0, b = 1, 5, k = 0, 5, m = 1, 0, A = 1, 0 . Численно исследуем поведение кривой l при поочередном варьировании каждого из параметров.
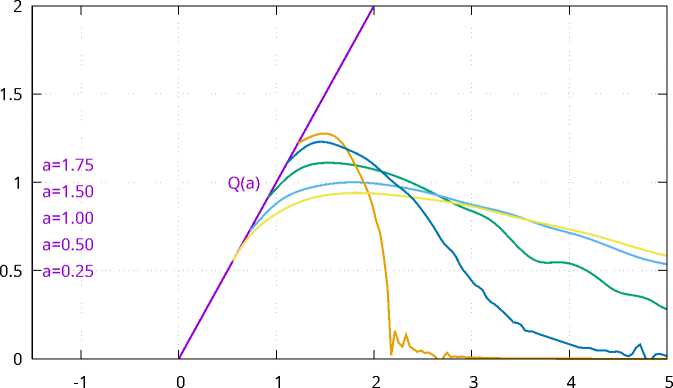
Варьирование параметра a
Поскольку кривая l имеет смысл только в случае A < m/(ak) и все параметры, кроме a , фиксированы, то область допустимых значений а есть (0, 2) . Координаты x(Q),y(Q) точки Q (8) - строго возрастающие линейные функции параметра а .
Пример на рис. 4 показывает, как меняется взаимное расположение кривых l при изменении a . Во-первых, кривые l , соответствующие разным значениям a , пересекаются, во-вторых, с ростом параметра a происходит сжатие кривой l вдоль оси Ox , увеличение max { y : (x, y) Е 1 } и области ухода.
x
Рис. 4. Взаимное расположение кривых 1 при различных значениях параметра а Е (0, 2) и постоянных b = 1, 5, к = 0, 5, m = 1, 0, А = 1, 0
Варьирование параметра b
Дифференцированием (7) и (8) по b несложно показать, что координаты R и Q – убывающие функции параметра b . На рис. 5 представлено пять экземпляров кривой l , соответствующих разным значениям b . По результатам численного исследования можно сделать следующие выводы. Во-первых, кривые l , соответствующие различным значениям b , не пересекаются, во-вторых, при увеличении значения параметра b область ухода увеличивается.
Варьирование параметра k
По экологическому смыслу, область допустимых значений параметра к есть (0,1) . Дифференцированием по k координат точки Q (8) нетрудно показать, что координаты точки Q – убывающие функции k . На рис. 6 представлены графики кривых l , соответствующие пяти значениям k . Кривые, соответствующие различным k , не пересекаются. С ростом k происходит увеличение области ухода.
Варьирование параметра m
Поскольку на λ наложено ограничение (10), то область допустимых значений m есть промежуток (0, 5, + то ) . На рис. 7 представлено пять экземпляров кривых 1 , соответствующим различным значениям m . Положение равновесия R с ростом m сдвигается по прямой y = a/b вправо, координаты точки Q возрастают. Анализируя численно полученные кривые l , получаем следующее. Во-первых, кривые не пересекаются, во-вторых, рост естественной смертности популяции хищников приводит к уменьшению области ухода.
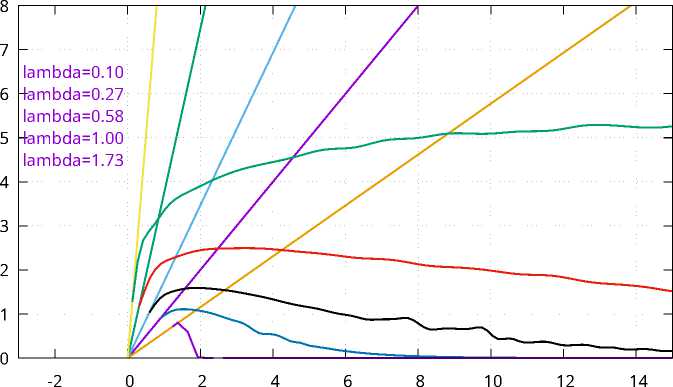
Варьирование параметра λ
В силу того, что 1 существует только при А < m/(ak) , область допустимых значений А есть (0,2) . На рис. 8 представлено пять кривых 1 и пять лучей x = Ay , соответствующих пяти различным значениям А Е (0, 2) . При увеличении A y(Q) убывает, а x(Q) возрастает. Сравнивать области ухода, соответствующие различным А ,
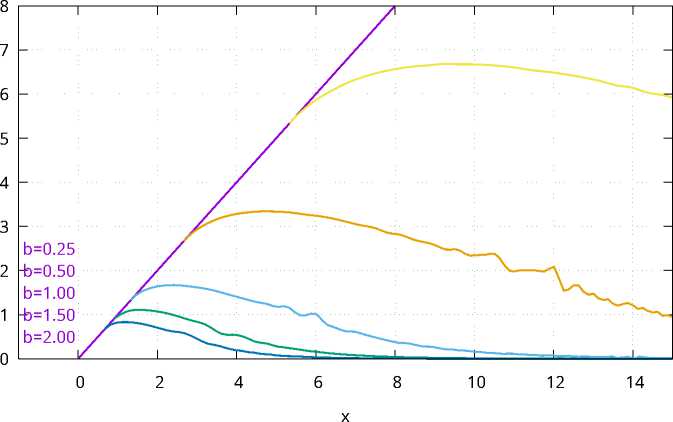
Рис. 5. Взаимное расположение кривых l при различных значениях параметра b и постоянных a = 1,0, k = 0, 5,m = 1, 0, A = 1, 0
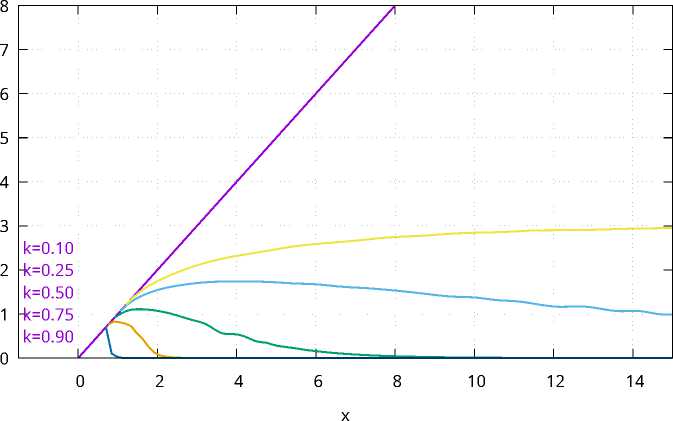
Рис. 6. Взаимное расположение кривых l при различных значениях параметра k и постоянных a = 1, 0, b = 1, 5, m = 1, 0, A = 1, 0
сложно, поскольку, кроме изменения положения кривой l , меняется и положение луча x = Ay .
Таким образом, численное исследование кривой l позволяет получить следующие свойства кривой l , которые мы формулируем в качестве гипотез.
H1. Пересечение кривых l происходит только при изменении значения параметра a .
H2. Область допустимых значений x i - промежуток [x(Q), + то ) .
H3. При x l ^ то y l ^ 0 + 0 .
H4. При возрастании a, b, k и убывании m происходит увеличение области ухода.
С одной стороны при увеличении a жертв становится больше, значит, у хищников становится меньшим желание уйти. С другой стороны, численные результаты
x
Рис. 7. Взаимное расположение кривых l при различных значениях параметра m и постоянных a = 1,0, b = 1, 5, к = 0, 5, A = 1, 0
X
Рис. 8. Взаимное расположение кривых l при различных значениях параметра A Е (0, 2) и постоянных a = 1, 0, b = 1, 5, к = 0, 5, m = 1, 0
показывают, что с увеличением a область ухода увеличивается, то есть вероятность ухода хищников в этом случае увеличивается. Можно показать, что в достаточно малой окрестности (OQ) , принадлежащей р + , нет точек кривой l , что подтверждается численно. С ростом a начальный участок l приближается справа к прямой, параллельной Oy , проходящей через точку, соответствующую max { y l : (x l ,y l ) Е l } ; когда a = 2 , кривая l вырождается в (OQ) , то есть нарушается непрерывное изменение кривой l при изменении a . Из системы Лотки – Вольтерра следует, что при увеличении a увеличивается x , y , но отношение x/y уменьшается, то есть область ухода увеличивается. Этот парадокс согласуется с парадоксом, отмеченным в [10], согласно которому, изымая жертв и не изымая хищников в системе Лотки – Вольтерра, мы не влияем на среднюю численность жертв, а средняя численность хищников при этом уменьшится (см. теорему 5.4 (закон изменения средних) в [10, стр. 151]).
5. Метод касательного управления
Пусть Mo = (zo, 0) E p+. Для Mo построим процессы управления, при которых выполнены условия 1-2 задачи, причем изъятие предлагается начинать в момент времени t = t1 - время попадания траектории системы (5) на плоскость x = Ay, поскольку при t < t1 n(t, M0, 0) > 0, а при t ^ t1 имеем n(t, M0, 0) С 0. Далее, разделив второе уравнение системы (4) на первое, получим dy y(kbx — m — u)
dx x(a — by)
Откуда при x = Ay имеем dy kbλy - m - u dx A (a — by)
Значит, тангенс угла наклона касательной, проведенной к траектории системы (4), соответствующей управлению u , через точку B(x(B ), y(B)) прямой x = Ay - линейная возрастающая функция u ( y(B ) > a/b ). Пусть u * = (k + 1/A)bx(B ) — a — m - управление, при котором dy/dx = 1/A . Таким образом, получаем, что при u < u * не будет выполнено условие 2 задачи, при u ^ u * условие 2 будет выполнено, но поскольку в работе ищется наименьшее антропогенное воздействие, сохраняющее видовой состав биосообщества, то далее рассматривается именно случай касательного управления u = u * .
Процесс управления 1
Пусть B' = r(t 1 ,C, 0) = (x(t 1 ,C, 0),y(t 1 ,C, 0),n(t 1 ,C, 0)) , где t 1 = min F ( F определено в (16)), C E a(z 0 , 0) П l(0) ,
n(B') = n(t 1 , C,
•E"
(x — Ay)dT,
u * = (k + 1 /A)bx(B) — a — m ; k 1 - наименьшее натуральное число, при котором выполнено неравенство
n(t i , M o , 0) + k i A(B, u * ) > n(B ‘ ).
Теорема 1. Если для любого t E [0,t 1 ) U [t 1 + k 1 T(B,u * ), + to )
-
u = 0,
для любого t E [t1 ,t1 + k1T(B,u*)) u = u*, то
-
1) u – допустимо,
-
2) n(t, M o , u) > 0 для любого t > 0, n(t, M o , u) ^ 0 для любого u > 0 .
Доказательство. 1) Очевидно, что
A(a + m) b(1 + kA) .
x(B) > x(Q) =
Следовательно, x(B )b(1 + kA) λ
> a + m.
Значит, u * > 0 , то есть и - допустимо.
-
2) При t Е (0,t 1 ) n(t,M 0 , 0) > 0 , следовательно, поскольку n(0,M 0 , 0) = 0 , то n(t,M 0 , 0) > 0 для любого t Е (0,t 1 ) . Покажем, что при и = и * n(t,M o ,u) ^ 0 . Разделив второе уравнение системы (4) на первое, получим
dy y (kbx — m — и)
dx x(a — by)
Подставив в последнее равенство x = x(B) = Ay(B), y = y(B), и = и*, получим dy =1 dx (x(B),y(B)),u=u* A
Следовательно, B - точка касания траектории a(B,u*) и луча р. Из леммы 2 (b) получаем, что при t Е [t1 ,t1 + k1 T(Beu*)), и = и* имеем nl(t,M0,u) > 0 и n(t,M0,и) ^ n(t1, М0,и) > 0. Осталось показать, что n(t,M0,u) > 0 для любого t Е [t1 + k1T(B,u*), +м). Поскольку k1 выбрано таким образом, что n(ti + kiT (В,и*),Мо
и ) =
(x — Ay)dT + k 1 A(B, и * ) > n(B ‘ )
и A(z 0 , 0) > 0 , то n(t, M 0 , и) > 0 для любого t Е [t 1 + k 1 T(B, и * ), + м ) .
Процесс управления 2
Лемма 3. Пусть а(М 1 ,и 1 ), a(M 1 , и 2 ) - траектории ситемы (4), соответствующие разным значениям и 1 ,и 2 и имеющие общую точку M 1 (x 1 ,y 1 , 0) . Тогда траектории имеют вторую общую точку M 2 (x 2 ,y 2 , 0), причем x 2 = x 1 .
Доказательство. Уравнения траекторий a(M1 ,и1), а(М1,и2) имеют вид a ln y — by + (m + и1) In x — kbx — (a In y1 — by1 + (m + и1) In x1 — kbx1) = 0, a In y — by + (m + и2) In x — kbx — (a In y1 — by1 + (m + и2) In x1 — kbx1) = 0.
Таким образом, получили систему двух уравнений с двумя неизвестными. Вычитая из второго уравнения системы первое, получим
(и 2 — u 1 )(ln x — In x 1 ) = 0.
Поскольку и 2 = и 1 , то x = x 1 .
Из леммы 3 следует, что a(M0, 0) П а(Б,и*) = B U D, причем x(D) = x(B). Известно, что 0 < t1 - первый момент времени, при котором x(t1, M0,0) = x(B). Пусть t1 < t1 + t3 - второй момент времени, при котором x(t1 + t3, Mo,и*) = x(B); t1 +13 < t1 +13 +14 - третий момент времени, при котором x(t1 +13 +14, Mo, 0) = x(B); k2 – наименьшее натуральное число, при котором выполнено неравенство t1 t1 +t3+t4
/ (x — Ay)dT + k 2 (x — Ay)dT > n(B').
Теорема 2. Если для любого t Е [0,ti) U (J
t 1 + (p — 1)(t 3 + t 4 ) + t 3 , t 1 + p(t 3 + t 4
p =1 ,k 2
U t i + k 2 (t 3 + t ^ ), + to^
u = 0, для любого t Е U [t1 + (p - 1)^3 + t4),t1 + (p - 1)(t3 + t4)+ t3^
p =1 ,k 2
U = U*, то
-
1) u – допустимо,
-
2) n(t, M 0 , u) > 0 для любого t > 0 , n(t, M 0 , u) ^ 0 для любого u > 0 .
Доказательство. 1) Допустимость u доказана в пункте 1 доказательства Теоремы 1.
2) Так как по условию x0> Xy0 и при t Е ^0, t1 + k2(t3 + t4)^ имеем n(t, M0, u) = x(t, M0, u) — Xy(t, M0, u) > 0, то n(t, M0, u) > n(0, M0, u) = 0. Далее, поскольку
n(t1 + k2(t3 + t4), Mo,
u)= [ 0
(x — Xy )dT + k2
t1+t3 +t4
t1
(x — Xy)dT > n(B')
и A(z0, 0) > 0, то n(t, Mo, u) > 0 для любого t Е
t1 + k2(t3 + t4), +ТО^ .
□
6. Численное моделирование процессов 1 – 2
Для реализации процесса управления 1 необходимо вычислить t 1 ,k 1 ,T(B,u*) процесса управления 2 - t 1 ,t 3 ,t 4 ,k 2 . При вычислении t i ,k j ,T (B,u*) где i = 1, 3,4 , j = 1, 2 , используется численный метод, разработанный в [5] для нахождения периода траектории системы Лотки – Вольтерра. В [5] предложена модификация метода Вольтерра [11], которая заключается в разбиении траектории a(z o ,u) на четыре дуги, при котором период вычисляется как сумма четырех собственных интегралов с приближенно найденными пределами интегрирования и неявно заданными функциями в подынтегральных выражениях. Причем пределы интегрирования и значения подынтегральных функций вычисляются методом хорд, приближенные значения интегралов находятся методом трапеций. Погрешность каждого из интегралов является суммой погрешностей, вносимых применяемыми методами. В [5] получена формула для оценки сверху погрешностей вычисления интегралов. С более подробным описанием численного метода можно ознакомиться в [5].
Далее процессы управления 1 и 2 строятся для начальных точек Q o = Q , Q i Е { (x,y, 0) : x = Xy } , i = 1,5 . То есть рассматривается случай, при котором t 1 = 0 , следовательно, j’11 (x — Xy)dT = 0 . То есть для точек Q i k 1 и k 2 принимают максимальные значения. Это значит, что расходы на изъятие будут максимальны.
Введем обозначения:
-
u i – управление, при котором Q i является точкой касания траектории f (x, y, Q i , u i ) = 0 и прямой x = Xy ;
T(Q i , 0) - период траектории f (x, y, Q i , 0) = 0 ;
n i (B ’ ) определено в (17);
T(Q i ,u i ) - период траектории f (x,y,Q i ,u i ) = 0 ;
A(Q i ,u i )= Q ( m + u i — X) ;
-
k 1i определено в (18), причем для Q i t 1 = 0 ;
C 1i = k 1i T(Q i ,u i )u i - затраты, необходимые на реализацию процесса управления 1;
-
t 3 i , t 4 i определены в описании процесса управления 2;
S ?i = ft 3^ (x - Ay)dT , где x = x(T,Q i ,U i ),y = y(т,Q i ,U i ) , т G [0,t 3 i ] ;
S 4i = t^ + t 4 i (x - Ay)dT , где x = х(т, Q i , 0),y = y (т, Q i , 0) , т G [t ?i ,t 3i + t^ ] ;
t i = t ?i + t 4 i , S i = S ?i + S 4 i ;
k 2 i определено в (19), причем для Q i t 1 =0 ;
C 2 i = k 2 i t 3 i u i — затраты, необходимые на реализацию процесса управления 2.
В табл. 1, 2 представлены результаты, полученные при a = 1,0, b = 1,5, к = 0, 5,m = 1, 0, А = 1, 0 . Погрешность вычисления T(Q i , 0) , T(Q i ,u i ) не превосходит 5.00 х 10 - ? , i = 0,5 . Для любой точки Q i ,i = 1,5 , k 1i = k 2 i = 1 . Сравнивая численно полученные затраты C 1i и C 2i , можно сделать вывод о том, что оптимальным в смысле минимизации затрат и вмешательства в естественные процессы биосообщества является процесс управления 2. Кроме этого, с ростом i затраты C 1 i и C 2 i возрастают.
Таблица 1
Зависимость C 1i от положения точки Q i G { (x,y, 0) : x = Ay } , i = 0,1,..., 5 , при a = 1, 0, b = 1, 5, k = 0, 5, m = 1, 0, A = 1, 0
|
i |
Q i |
u i |
n i (B' i ) |
т (Q i , 0) |
т (Q i ,u i ) |
A(Q i ,U i ) |
k 1i |
C 1i |
|
0 |
(0,89,0,89) |
0,00 |
0,00 |
6,41 |
6,41 |
4,27 |
0,00 |
0,00 |
|
1 |
(0,90,0,90) |
0,02 |
2,04 х 10 - 5 |
6,41 |
6,34 |
4,43 |
1 |
0,16 |
|
2 |
(1,00,1,00) |
0,25 |
1,72 х 10 - 2 |
6,42 |
5,82 |
5,82 |
1 |
1,45 |
|
3 |
(1,10,1,10) |
0,47 |
9,25 х 10 - 2 |
6,46 |
5,43 |
7,06 |
1 |
2,58 |
|
4 |
(1,20,1,20) |
0,70 |
0,23 |
6,51 |
5,14 |
8,22 |
1 |
3,60 |
|
5 |
(1,30,1,30) |
0,92 |
0,40 |
6,58 |
4,90 |
9,32 |
1 |
4,53 |
Таблица 2
Зависимость C 2 i от положения точки Q i G { (x,y, 0) : x = Ay } , i = 0,1,..., 5 , при a = 1, 0, b = 1, 5, k = 0, 5, m = 1, 0, A = 1, 0
|
i |
Q i |
u i |
n i (B' i ) |
t 3i |
S 3i |
t 4i |
S 4i |
t i |
S i |
k 2i |
C 2i |
|
0 |
(0,89,0,89) |
0,00 |
0,00 |
1,57 |
0,24 |
4,83 |
4,03 |
6,41 |
4,27 |
0 |
0 |
|
1 |
(0,90,0,90) |
0,02 |
2,04 х 10 - 5 |
1,57 |
0,25 |
4,75 |
4,01 |
6,32 |
4,26 |
1 |
0, 04 |
|
2 |
(1,00,1,00) |
0,25 |
1, 72 х 10 - 2 |
1,51 |
0,34 |
4,07 |
3,88 |
5,58 |
4,22 |
1 |
0,38 |
|
3 |
(1,10,1,10) |
0,47 |
9, 25 х 10 - 2 |
1,46 |
0,43 |
3,53 |
3,82 |
5,00 |
4,26 |
1 |
0,69 |
|
4 |
(1,20,1,20) |
0,70 |
0,23 |
1,42 |
0,51 |
3,14 |
3,85 |
4,56 |
4,36 |
1 |
0,99 |
|
5 |
(1,30,1,30) |
0,92 |
0,40 |
1,38 |
0,59 |
2,84 |
3,93 |
4,23 |
4,52 |
1 |
1,28 |
Далее, численно исследуем, как изменяются затраты C 2 в зависимости от u . Пусть a = 1,b = 1, 5, k = 0, 5,m = 1, начальная точка M 1 = (1,1, 0) фиксирована, A = 1 , интенсивность изъятия особей растет, причем начальное значение и = и * = 0,25 соответствует касательному управлению. Поскольку, во-первых, точки пересечения траекторий системы Лотки - Вольтерра при и = 0 и и > u * , M 1 , M 2 , не зависят от значения u , во-вторых, тангенс угла наклона касательной, проведенной к траектории, соответствующей и > и * , через точку M 1 - линейная возрастающая функция и , то в процессе управления 2 вместо интенсивности изъятия и = и * может быть испольнована интенсивность и > и * . В табл. 3 в зависимости от и ^ и * представлены значения t 3 – время движения по цилиндру с управлением, S 3 – величина изменения n при движении по цилиндру с управлением за временной промежуток длины t 3 , k 2
- количество оборотов в процессе управления 2, C 2 (и) - затраты, соответствующие управлению u . Проанализировав результаты, можно сделать вывод о том, что с ростом u время движения по цилиндру с управлением убывает, а суммарные затраты растут. Таким образом, при решении поставленной задачи оптимальным значением и является касательное и = и * . Использование в процессе 2 интенсивности и > и * влечет неоправданные расходы.
Таблица 3
Зависимость C 2 от u
|
u |
t 3 |
S 3 |
k 2 |
С 2 (и) |
|
0,25 |
1,51 |
0,35 |
1 |
0,378 |
|
0,75 |
0,84 |
0,23 |
1 |
0,628 |
|
1,25 |
0,57 |
0,17 |
1 |
0,714 |
|
1,75 |
0,43 |
0,13 |
1 |
0,756 |
|
2,25 |
0,35 |
0,11 |
1 |
0,781 |
|
2,75 |
0,29 |
0,09 |
1 |
0,797 |
|
3,25 |
0,25 |
0,08 |
1 |
0,809 |
|
3,75 |
0,22 |
0,07 |
1 |
0,817 |
|
4,25 |
0,19 |
0,06 |
1 |
0,824 |
|
4,75 |
0,17 |
0,05 |
1 |
0,829 |
|
5,25 |
0,16 |
0,05 |
1 |
0,833 |
7. Обобщение процесса управления 2
Пусть M 0 = (z 0 , 0) E p + . С помощью численного анализа выясним, в какой момент времени t E [0,t 1 ] выгоднее переключаться со значения и = 0 на значение и = 0 , соответствующее касательной траектории. Разобьем дугу [M o B ] С a(z o , 0) С p + U p на n частей точками M o = (x o ,y o , 0),M 1 = (x i ,y i , 0 ),..., M n-i = (х п-і ,У п-і , 0),M n = (x n , y n , 0) = B . Далее для каждой точки M i , i = 0, n , вычисляются:
-
1) и і - управление, при котором a(x i ,y i ,u i ) П p = Q i , причем
A(a + m + и і ) a + m + иЛ Q i = Q ( u 1 = (, b(1 + kA) ’ b(1 + kA) ) ■
Вычисляется u i следующим образом. Подставив в (9)
A(a + m + ui) a + m + иі x0 = xi,y0 = yi,x = b(1 + kX) ,y = b(1 + kX)
и обозначив через и сумму a + m + иі, получим и ln и + Ри + Q = 0,
где Р = ln bx i (1+ kA ) - 1 , 0 < Q = a In jy i + b(y i + kx i ) . При фиксированных X i .y i уравнение (20) имеет два решения, меньшее из которых дает искомое u i .
-
2) t i 3 , описание которого дано ниже.
Поскольку, в силу леммы 3, a(M0,0) П a(Mi,ui) = Mi U Mi, причем x(Mi) = x(M[) = xi, то найдутся следующие моменты времени: t(M0Mi) E [0,t1] - первый момент времени, при котором x(t(MoMi),Mo, 0) = xi; t(MoMi) + t3 — второй момент времени, при котором x(t(MoMi) + t3, Mo, ui) = xi; t(MoMi) + t3 + t\ — третий момент времени, при котором x(t(MoMi) + t3 + t^,Mo, 0) = xi, t(MiB) - наименьшее время движения фазовой точки траектории a(Mo, 0) из точки Mi в точку B. Заметим, что ti = t(Mo Mi)+ t(Mi B).
-
3) n(t 1 + t 3 + t 4 , M o , u) по формуле:
rt i ttM O o M i )+ti 3 tt(Mo M i )+t 3 +t i 4
n(t 1 +1 3 + t ^ , M o ,u) = J (x — Xy)dT + j (x — Xy )dT + j i (x — Xy)dT.
-
4) Если n(t 1 + t 3 + t ^ ) > n(B ’ ) , то вычисляются затраты на изъятие особей:
C i = t 3 u-
Создана программа для вычисления затрат, необходимых на реализацию данного процесса управления, i = 0,n (табл. 4). Анализируя численные результаты, можно сделать следующиий вывод. Если начать изъятие с интенсивностью u 0 при t = 0 , то суммарные затраты на реализацию процесса управления будут минимальны, если же начать изъятие в момент времени t = t 1 , то есть реализовать исходный процесс управления 2, то затраты будут максимальны. Таким образом, получаем, что наиболее выгодно начинать изъятие при t = 0 (рис. 9).
Таблица 4
Зависимость C i от M i Е [M o B] , i = 0,10 , a = 1, 0,b = 1,5,k = 0, 5,m = 1, 0, X = 1, 0, x o = 2, 0, y o = 0, 9, n = 10 ( n(B ‘ ) = 0, 04 )
|
x i |
y i |
u i |
i t 3 |
n(t i +1 3 +1 ^ ) |
C i |
|
2,00 |
0,90 |
0,03 |
0,40 |
2,62 |
0,01 |
|
1,90 |
0,95 |
0,04 |
0,46 |
3,01 |
0,02 |
|
1,81 |
1,00 |
0,04 |
0,50 |
3,30 |
0,02 |
|
1,71 |
1,03 |
0,04 |
0,52 |
3,54 |
0,02 |
|
1,62 |
1,06 |
0,05 |
0,53 |
3,74 |
0,02 |
|
1,52 |
1,08 |
0,05 |
0,53 |
3,91 |
0,03 |
|
1,43 |
1,09 |
0,06 |
0,53 |
4,06 |
0,03 |
|
1,33 |
1,09 |
0,07 |
0,51 |
4,20 |
0,04 |
|
1,23 |
1,09 |
0,09 |
0,49 |
4,31 |
0,04 |
|
1,14 |
1,07 |
0,12 |
0,45 |
4,42 |
0,06 |
|
1,04 |
1,04 |
0,34 |
0,38 |
4,51 |
0,13 |
Заключение
Рассмотрена модель, описывающая взаимодействие хищников и жертв на некотором участке, причем по предположению жертвы не покидают участок, а хищники мигрируют с участка в случае его недостаточной пищевой привлекательности. Поставлена задача сохранения видового состава биосообщества данного участка за счет изъятия особей популяции хищников. Доказано существование кривой, разделяющей множество всевозможных значений начальных численностей на два: область ухода – множество, точками которого необходимо управлять для предотвращения миграции
x
Рис. 9. Исходная траектория a(zo, 0) и траектория a(zo,uo), соответствующая оптимальному управлению, в смысле минимизации затрат и внешнего воздействия хищников с участка, и множество, для точек которого управление не требуется, то есть видовой состав сохраняется естественным образом. В работе предложен метод касательного управления и построены соответствующие процессы управления. С помощью численного моделирования найден процесс управления, при котором затраты и вмешательство в естественные процессы биосообщества минимальны.
Работа проводилась при финансовой поддержке РНФ в рамках научного проекта 23-21-00092.
