Метод контроля мелкомоторной координации как инструмент профессионально-прикладной физической культуры

Автор: Померанцев А.А.
Журнал: Человек. Спорт. Медицина @hsm-susu
Статья в выпуске: S2 т.23, 2023 года.
Бесплатный доступ
Цель: разработать универсальный метод контроля мелкомоторной координации для лиц различных профессий.
Синергия, синкинезия, мелкая моторика, комбинаторный анализ, жест, пальцы, нейронная сеть
Короткий адрес: https://sciup.org/147242150
IDR: 147242150 | УДК: 612.763 | DOI: 10.14529/hsm23s207
Fine motor skill control for professionally oriented physical education
Aim. To create a universal method for fine motor skill control for people of different professions.
Текст научной статьи Метод контроля мелкомоторной координации как инструмент профессионально-прикладной физической культуры
A.A. Pomerantsev, , Lipetsk State Pedagogical P. Semenov-Tyan-Shansky University, Lipetsk, Russia
Введение. Мастерство во многих профессиях определяется уровнем владения мелкой моторикой. Пианисты, дирижеры, спортсмены, киберспортсмены, хирурги, музыканты, стоматологи, ювелиры имеют специфические двигательные задачи, которые решаются с помощью кисти [7]. Пять пальцев действуют согласованно, формируют профессиональные мышечные синергии, которые, доведенные до автоматизма, переходят в синкинезии [5]. Очевидно, что каждой профессии присущ определенный набор профессиональных синергий мелкой моторики [4, 6].
Задачи исследования: 1) используя положения комбинаторного анализа выявить теоретически возможные синергии пальцев рук человека; 2) разработать метод контроля мелкомоторной координации на основе регистрации времени построения синергий; 3) апробировать предложенный метод на практике; 4) представить перспективы разработанного метода для профессионально-прикладной физической культуры.
Материалы и методы. Теоретическая часть была направлена на выявление всех возможных синергий мелкой моторики, основанных на сгибании – разгибании пальцев [3]. Для определения общего количества синергий
использовались положения и формулы комбинаторного анализа [2]. Практическая часть заключалась в регистрации синергий у человека и анализе полученных данных.
В исследовании приняла участие девочка 7 лет из подготовительной группы детского сада, не имеющая отклонений в психическом и физическом развитии. На исследование было получено письменное разрешение родителей.
Тестирование проводилось с помощью разработанной авторами специализированной компьютерной программы FingerFit версия 5.0, на основе авторского метода [1].
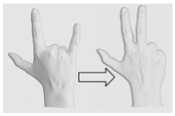
Процедура прохождения теста FingerFit заключалась в следующем. На экран компьютерного монитора выводился жест-команда, представляющий сочетание согнутых и выпрямленных пальцев левой руки. Тестируемая при виде изображения должна была сформировать правильный жест-ответ, который состоял из противоположной комбинации согнутых и выпрямленных пальцев руки. Правильность ответа и время реакции фиксировалось с помощью фреймворка нейронной сети MediaPipe Hands, определяющей жест в автоматическом режиме на основе анализа видеопотока.
Результаты исследования. С одной стороны, время построения обратного жеста определяется сложностью самого жеста, с другой стороны, кибернетической нагрузкой (κ) выполнения двигательного действия. Под кибернетической нагрузкой мы понимаем количество пальцев, участвующих в изменении жеста. Для формализации задачи каждый жест был записан в виде двоичного шифра (τ), в котором выпрямленный палец обозначается единицей, а согнутый – нулем (табл. 1).
В приведенном случае кибернетическая нагрузка κ = 2.
Поскольку возможное сочетание выпрямленных и согнутых пальцев одной руки составляет 25 = 32, то количество комбинаций смены жестов равно n = 210 = 32 · 32 = 1024. Из этого количества необходимо исключить
n0 = 32 повторяющихся жеста, когда не происходит смены пальцев, а также случаи сгибания или разгибания одного пальца n 1 = 160. Окончательное количество синергий высшего уровня составляет n synergy = n – n 0 –n 1 = 832 (табл. 2).
Кибернетическая нагрузка может складываться из исключительно сгибания пальцев или исключительно разгибания пальцев (табл. 3).
Кроме синергий сгибания или разгибания могут быть комбинированные синергии, образованные одновременно сгибанием и разгибанием пальцев (табл. 4). Так, синергия с кибернетической нагрузкой κ = 5 может быть образована одновременным сгибанием 2 пальцев (–2) и разгибанием 3 пальцев (+3).
Комбинированные синергии состоят из набора более простых синергий. Например,
Пример определения кибернетической нагрузки при смене жеста
An example of determining the cybernetic load when changing a gesture
|
p |
i |
med |
a |
min |
|
|
Исходный жест / Initial gesture, τ 1 |
1 |
1 |
0 |
0 |
1 |
|
Конечный жест / Resulting gesture, τ 2 |
1 |
1 |
1 |
0 |
0 |
|
Синергия / Synergy, ς |
0 |
0 |
1 |
0 |
1 |
Таблица 1
Table 1
Примечания. Обозначения пальцев приводятся в соответствии с их латинскими названиями: p – большой палец (pollex), i – указательный палец (index), med – средний (digitus medius), a – безымянный (annularis), min – мизинец (digitus minimus).
Note. Fingers are abbreviated by their latin titles, namely p – pollex, i – index, med – digitus medius, a – annularis, min – digitus minimus.
Таблица 2
Table 2
Количество комбинаций синергий верхнего уровня
Top-level synergy combinations
|
Кибернетическая нагрузка Cybernetic load, κ |
0 |
1 |
2 |
3 |
4 |
5 |
|
Кол-во комбинаций Number of combinations |
32 |
160 |
320 |
320 |
160 |
32 |
Таблица 3
Table 3
Количество комбинаций синергий сгибания/разгибания пальцев
Number of combinations of finger flexion/extension synergies
Для оценки синергий нами был разработан метод контроля, реализованный в виде
компьютерного приложения FingerFit 5.0. Непосредственный алгоритм контроля жестов был реализован с помощью фреймворка нейронной сети MediaPipe Hands.
С целью апробации предлагаемого метода были зарегистрированы и проанализированы синергии мелкой моторики правой руки девочки 7 лет, не имеющей отклонений или задержек в развитии. Общее время прохождения теста составило 467 с (табл. 5).
В результате случайного появления жес-
Таблица 4
Table 4
Количество комбинированных синергий, образованных одновременно сгибанием и разгибанием пальцев
The number of combined synergies formed by simultaneous flexion and extension of the fingers
|
Кибернет. нагрузка Cybernetic load |
Комбинация Combination |
Количество вариантов комбинации Number of options |
Количество вариантов для уровня нагрузки Number of options with respect to load |
|
2 |
–1/+1 |
160 |
160 |
|
3 |
–1/+2 |
120 |
240 |
|
–2/+1 |
120 |
||
|
4 |
–1/+3 |
40 |
140 |
|
–2/+2 |
60 |
||
|
–3/+1 |
40 |
||
|
5 |
–1/+4 |
5 |
30 |
|
–2/+3 |
10 |
||
|
–3/+2 |
10 |
||
|
–4/+1 |
5 |
Таблица 5
Table 5
Результаты тестирования (профиль) мелкой моторики по тесту FingerFit 5.0 Fine motor skill profiling with the FingerFit test
|
№ |
τ |
ς |
t |
κ |
№ |
τ |
ς |
t |
κ |
№ |
τ |
ς |
t |
κ |
|
1 |
00011 |
11111 |
9 |
5 |
12 |
10110 |
11110 |
21 |
4 |
23 |
00110 |
10101 |
10 |
3 |
|
2 |
10100 |
10111 |
7 |
4 |
13 |
11100 |
01010 |
8 |
2 |
24 |
01011 |
01101 |
12 |
3 |
|
3 |
00100 |
10000 |
6 |
1 |
14 |
11001 |
00101 |
12 |
2 |
25 |
00001 |
01010 |
5 |
2 |
|
4 |
10001 |
10101 |
7 |
3 |
15 |
10000 |
01001 |
4 |
2 |
26 |
11000 |
11001 |
9 |
3 |
|
5 |
01111 |
11110 |
7 |
4 |
16 |
10010 |
00010 |
11 |
1 |
27 |
00101 |
11101 |
14 |
4 |
|
6 |
11111 |
10000 |
7 |
1 |
17 |
01001 |
11011 |
20 |
4 |
28 |
01110 |
01011 |
11 |
3 |
|
7 |
00111 |
11000 |
40 |
2 |
18 |
01100 |
00101 |
11 |
2 |
29 |
01101 |
00011 |
41 |
2 |
|
8 |
10111 |
10000 |
5 |
1 |
19 |
11110 |
10010 |
7 |
2 |
30 |
11011 |
10110 |
13 |
3 |
|
9 |
00000 |
10111 |
3 |
4 |
20 |
00010 |
11100 |
11 |
3 |
31 |
11101 |
00110 |
11 |
2 |
|
10 |
01010 |
01010 |
20 |
2 |
21 |
10101 |
10111 |
75 |
4 |
32 |
11010 |
00111 |
36 |
3 |
|
11 |
01000 |
00010 |
7 |
1 |
22 |
10011 |
00110 |
7 |
2 |
Примечание. Жест и синергия представлены в порядке p-i-med-a-min. № – порядок появления жестов в тесте, τ – шифр жеста, ς – шифр синергии , t – время ответной реакции построения обратного жеста, κ – кибернетическая нагрузка.
Note. Gesture and synergy are provided in the following order: p-i-med-a-min. № is the order of appearance of gestures in the test, τ – gesture cipher, ς – synergy cipher , t – response time of the reverse gesture, κ – cybernetic load.
тов было выявлено 145 синергий, в том числе синергий высшего уровня: κ 4 – 7, κ 3 – 8, κ 2 – 11; всего синергий нижнего и высшего уровней: κ 4 – 12; κ 3 – 46, κ 2 – 87. Наиболее сложной оказалась синергия, включающая согласованное движения 4 пальцев: одновременное разгибание мизинца, большого и среднего пальца и сгибание безымянного пальца, со временем построения 75 с (см. табл. 5).
Заключение. Разработанный метод контроля мелкомоторной координации является универсальным инструментом оценки мелкой моторики у лиц различных профессий. Применительно к требованиям конкретной профессии метод позволяет выявить слабо развитые синергии и построить комплекс упражнений для развития мелкой моторики в рамках профессионально-прикладной физической культуры.
Список литературы Метод контроля мелкомоторной координации как инструмент профессионально-прикладной физической культуры
- Пат. 2717365 C1 Российская Федерация. Способ оценки мелкой моторики рук / А.А. Померанцев, А.Н. Старкин; заявитель и патентообладатель Липецкий гос. пед. ун-т. им. П.П. Семенова-Тян-Шанского. - № 2018147383; заявл. 27.12.2018; опубл. 23.03.2020.
- Холл, М. Комбинаторика / М. Холл; под ред. А.О. Гельфонд, В.Е. Тараканова; пер. с англ. С.А. Широковой. - М.: Мир, 1970. - 423 с.
- Evaluation of Finger Force Control Ability in terms of Multi-finger Synergy / M. Lee, J. Lee, J. Shin, J. Bae // IEEE Transactions on Neural Systems and Rehabilitation Engineering. - 2019. - P. 1-11. DOI: 10.1109/tnsre.2019.2932440
- Kim, K. Effect of Kinetic Degrees of Freedom on Multi-Finger Synergies and Task Performance during Force Production and Release Tasks / K. Kim, D. Xu, J. Park // Scientific Reports. - 2018. - No. 8. - Art. 12758. DOI: 10.1038/s41598-018-31136-8 EDN: MSRWCA
- Latash, M.L. One more time about motor (and non-motor) synergies / M.L. Latash // Experimental Brain Research. - 2021. - Vol. 239 (10). - P. 2951-2967. DOI: 10.1007/s00221-021-06188-4 EDN: BFCVDR
- Madarshahian, S. Synergies at the level of motor units in single-finger and multi-finger tasks / S. Madarshahian, M.L. Latash // Experimental Brain Research. - 2021. - Vol. 239 (9). - P. 2905-2923. DOI: 10.1007/s00221-021-06180-y EDN: ZKBHJP
- Multi-finger synergies and the muscular apparatus of the hand / C. Cuadra, A. Bartsch, P. Tiemann et al. // Experimental Brain Research. - 2018. - Vol. 236 (5). - P. 1383-1393. DOI: 10.1007/s00221-018-5231-5 EDN: YFVCQX
