Метод определения тензора инерции на программных движениях

Автор: Мельников В.Г., Едачев А.С., Мельников Г.И., Шаховал С.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение
Статья в выпуске: 1-2 т.12, 2010 года.
Бесплатный доступ
Представлен новый метод идентификации осевых и центробежных моментов инерции в точке те ла, матрицы тензора инерции тела на устройствах с трением и аэродинамическим сопротивлением. Предложено исполнительное устройство и система реверсивно-симметричных программных движений, обеспечивающая определение инерционных параметров с точностью, не зависящей от трения. Предложено исполнительное устройство, осуществляющее метод
Реверсивно-симметричное движение, собственное вращение, тензор инерции, программное управление, идентификация
Короткий адрес: https://sciup.org/148198961
IDR: 148198961 | УДК: 681.5
Method of identification the inertia tensor on program movements
The new method of identification the axial and centrifugal moments of inertia in a point of a body, a tensor matrix is presented to inertia of a body on devices with friction and aerodynamic resistance. The executive device and the system of reversive-symmetric program movements providing definition of inertial parameters with accuracy, not dependent on friction is offered. The executive device which is carrying out a method is offered.
Текст научной статьи Метод определения тензора инерции на программных движениях
Элементы тензора инерции и моменты инерции. Тензор инерции в точке О твердого тела в связанной с телом системе Oxyz задают матрицей осевых и центробежных моментов инерции вида
J =
I x I yx I zx
I xy I y I zy
I yz I z
1 = Iyx = -j PxydV
V
Момент инерции тела относительно оси, заданной ортом e i , вектор-строкой e i =[ e ix e iy e iz ], представляется в виде произведения век-тор-строки U =[ I x I y I z I xy I yz I xz ] и вектор-столбца A i , составленного из квадратов и двойных произведений направляющих
222 2
i i , i ix iy iz ix iy iy iz ix iz , i = 1,...,6
Рассмотрим виртуальный конус с осью Oz, углом (2α) при вершине O, на конусе равномерно распределим пять осей с ортами e1,..., e5, орт e6 направим вдоль оси Oz, орт e1 расположим в плоскости Oxz, а последующие орты получаем последовательно поворотами на угол β=72o вокруг Oz. Получаем ei = [cos(tp - в), sin(tp - P), ctga]sina, i = 1,...,5, e6 = [0,0,1].
Посредством горизонтального объединения шести матричных равенств (2) получаем уравнение UA = I 0 , и формулу для вектор-строки U :
U = I о B ,
I о = [ 1 1 ,---, 1 6 ]
A = [ A ,---, A 6J
B = A - 1 ,det B = 1/det A
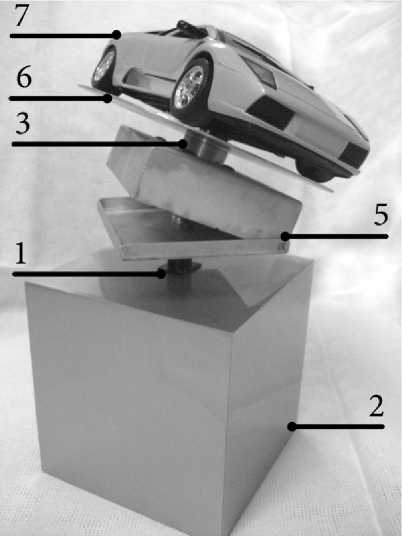
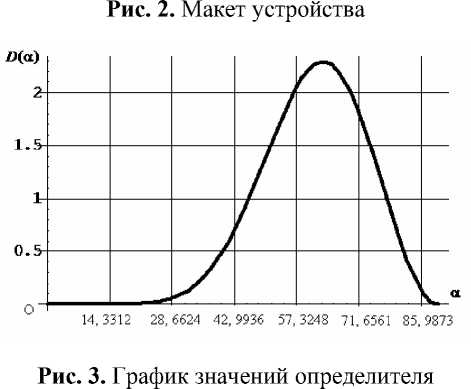
Исполнительное устройство (рис. 1, рис. 2) состоит из сервопривода 1 с робастной системой управления, платформы 2 , шагового двигателя 3 , подъемника 4 , шарнира 5 , платформы 6 с закрепленным на ней изделием 7 . По условиям эксплуатации желательно, чтобы угол α был небольшим, но с другой стороны при малом α имеем малое значение определителя D ( α )=det A , т.е. – плохо обусловленную задачу [11]. На рис. 3 показан график значений определителя, представленного функцией D ( α )=27,95 sin8 α cos2 α , максимальное значение D max ≈2,29 достигается в случае направления ортов по осям икосаэдра, при угле α 0 ≈63,43o. Будем считать систему достаточно хорошо обусловленной при выполнении условия: | D ( α )|≥0,5, т.е. при значении угла из интервала a e [40 0 ; 82] (рис. 3).
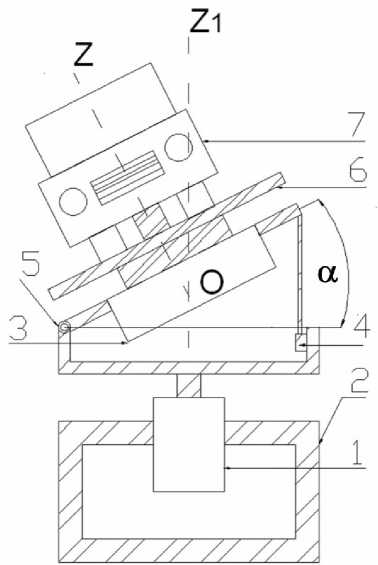
Рис. 1. Схема устройства
Расчетная формула для моментов инерции. Осевой момент инерции твердого тела будем определять на следующих реверсивных тормозных-разгонных вращениях, состоящих из замедленного вращения на угловом интервале [v0V1 = V0 + д], д > о с повторением в обратном порядке вращения на интервале [V1,V0]. Торможение может быть неуправляемым, но замеряемым, допускается замеряемый выбег за пределы интервала до некоторого значения Vr = v(tr). Затем осуществляем обратное движение, рассчитанное по замеренному движению. Пусть методом точечной аппроксимации получено уравнение торможения V = f (t) при t e [10, tr ], тогда уравнение обратного движения есть v = f (t') при t' = 10 + tr -1. Работа сил тяжести равна нулю ввиду вертикальности оси вращения, поэтому программные движения можно выполнять в любом ограниченном угловом интервале. По теореме кинетической энергии на тормозном и обратном вращении имеем уравнения
(Iо + IX«12 - «o ) = 2(A + V),
(Iо +1« - « )= 2(A ‘ + V') (4)
« 1 = V & ( 1 1 ), to o = 4 ( 1 o )
Здесь A , A ' – работы крутящего момента на интервале [ у 0 , ^ 1 ] ; V , V ' - работы диссипативных сил, I – момент инерции изделия, I 0 – приведенный момент инерции исполнительного устройства. Вычитая почленно уравнения (4), получаем расчетную формулу, определяющую осевой момент инерции тела через разность работ крутящего момента
- 1
-
1 = (A '- A)(« - «4 ) - Io
. (5)
Формула (5) не содержит работы диссипативных сил и может быть использована на динамически симметричных устройствах с существенным трением и аэродинамическим сопротивлением, удовлетворяющих условию равенства их работ на тормозном и обратном движении, что можно обеспечить симметричной оболочкой на изделии.
В конце первого эксперимента включается электродвигатель собственного вращения для поворота на угол ∆φ=720 и установки изделия в новом угловом положении по отношению к оси Oz 1 . Выполняется 5 испытаний. Шестое испытание выполняем при установке α =0 (рис. 1), где в расчетах следует применить формулу Гюйгенса-Штейнера. Итак, по формуле типа (5) находим 6 осевых моментов инерций изделия I 1 ,…, I 6 , при этом осевые моменты инерции устройства I 01 ,…, I 06 находят заранее на отдельных испытаниях устройства без нагрузки.
Допустим, что замеряется потребление двигателем электроэнергии E и E ' на рассматриваемых угловых интервалах. Она расходуется на механические работы A + V и A ' + V ' , а также - на омические потери и на изменение электромагнитного поля
E = A + V + 3,
E ' = A Ч V ' + 3 ,
A '- A = E '- E - ( 3'-3 ), 3> 3
Подставляя последнее равенство в (5), получим энергетическую формулу
I = (E - E'+ 3 - 3)(«2 - «12)-1 -1o, (6)
выражающую момент инерции тела относительно каждой оси через разность потребляемой электроэнергии и разность омических потерь в контурах. Потери 3’ , 3 можно оценить на испытании с эталонным телом.
Пусть угол φ не фиксирован, медленно изменяется, обеспечивая непрерывное изменение положения в теле оси Oz 1 . Тогда имеем угловую скорость сферического движения в виде « = у к 1 + ф к к ф к 1 , и с малой погрешностью можно применить формулы типа (5) на интервалах времени [ 1 , -, t i + 1], i = 1,...,5 , на которых φ получает изменение 720.
Работа выполнена при финансовой поддержке гранта РФФИ 06-08-01338-а и гранта Комитета по науке и высшей школе Санкт-Петербурга за 2009г.
Список литературы Метод определения тензора инерции на программных движениях
- Гернет, М.М. Определение моментов инерции/М.М. Гернет, В.Ф. Ратобыльский. -М.: Машиностроение, 1969. -130 с.
- Previati, G. Advances on inertia tensor and centre of gravity measurement: The INTENSO+ system/G. Previati, G. Mastinu, M. Gobbi//SAWE pa-per. -2009. -№ 3465.
- Беляков, А.О. Определение моментов инерции крупногабаритных тел по колебаниям в упругом подвесе/А.О. Беляков, А.П. Сейранян//Известия Российской академии наук. Механика твердого тела. -2008. -№ 2. -С. 49-62.
- Bogdanov, V.V. A Suite for Measuring Mass, Coordinates of the Center of Mass, and Moments of Inertia of Engineering Components/V.V. Bogdanov, V.S. Volobuev, A.I. Kudryashov, V.V. Travin//Measurement Techniques. -2002. -V. 45, № 2. -P. 168-172.
- Hahn, H. Development of a measurement robot for identifying all inertia parameters of a rigid body in a single experiment/H. Hahn, M. Niebergall//IEEE Trans. Control Systems Technol. -2001. -N9 (2). -P. 416-423.
- Банит, Ю.Р. Определение тензора инерции Международной космической станции по телеметрической информации/Ю.Р. Банит, М.Ю. Беляев, Т.А. Добринская и др.//Космические исследования. -2005. -Т. 43, № 2. -С. 135-146.
- Алексеев, К.Б. Определение динамических параметров космического летательного аппарата по признакам динамической асимметрии/К.Б. Алексеев, А.В. Шадян//Машиностроение и инженерное образование. -2007. -№ 2. -С. 53-58.
- Мельников, В.Г. Способ определения тензора инерции тела.//Патент РФ на изобр. -2009, №2262678, Бюлл. №6 от 27.02. 2009 -C.35.
- Melnikov, V.G. A new method for inertia tensor and center of gravity identification//Nonlinear Analysis. -2005. -V. 63. -№ 5-7 -P. 1377-1382.
- Мельников, В.Г. Энергетический метод параметрической идентификации тензоров инерции тел//Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики. -2010. -№ 1. -С. 59-63.
- Шаховал, С.Н. Исследование матричных алгебраических уравнений, определяющих тензор инерции через осевые моменты инерции//Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики. -2008. -№ 47. -С. 196-199.
