Метод прогноза и коррекции для моделирования автоколебательных систем

Автор: Зайцев В.В.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 2 т.22, 2019 года.
Бесплатный доступ
В работе предложен физически обоснованный алгоритм численного моделирования нелинейных колебательных и автоколебательных систем. Алгоритм базируется на дискретной во времени модели линейного осциллятора. Нелинейность учитывается введением в осциллятор дополнительных связей путем структурного анализа исходной системы. Для аппроксимации временной производной в нелинейных связях предложено использовать схему прогноза и коррекции. Несмотря на то что теоретически алгоритм имеет второй порядок точности, в рамках численного эксперимента с осциллятором Ван дер Поля он демонстрирует лучшие результаты, чем стандартный метод второго порядка - метод Хойна.
Колебательные и автоколебательные системы, нелинейность, конечно-разностная схема, прогноз и коррекция, спектр автоколебаний
Короткий адрес: https://sciup.org/140256088
IDR: 140256088 | УДК: 519.622 | DOI: 10.18469/1810-3189.2019.22.2.25-29
The predictor-corrector method for modelling of self-oscillatory systems
In the work physically reasonable algorithm of numerical modeling of nonlinear oscillatory and self-oscillatory systems is offered. The algorithm is based on discrete in time model of the linear oscillator. Nonlinearity is considered by introduction to the oscillator of additional communications by the structural analysis of an initial system. For approximation of a temporary derivative in nonlinear communications it is offered to use the scheme of the prediction and correction. In spite of the fact that theoretically the algorithm has the second order of accuracy, within the numerical experiment with Van der Pol oscillator it shows the best results, than a standard method of the second order - the Heun’s method.
Текст научной статьи Метод прогноза и коррекции для моделирования автоколебательных систем
Уравнения движения нелинейных осцилляторов (колебательных и автоколебательных систем), как правило, не имеют аналитических решений. Поэтому теоретический анализ нелинейных колебаний часто основан на использовании приближенных асимптотических методов [1; 2] или методов численного интегрирования задачи Коши для систем дифференциальных уравнений [3; 4]. Не пытаясь дать развернутую характеристику последних, отметим, что они в большинстве случаев являются следствиями формальных аппроксимаций интегродифференциаль-ных операторов уравнений движения конечными разностями [5]. В связи с этим с практической точки зрения интересны алгоритмы численного моделирования нелинейных динамических систем, базирующиеся на физических представлениях о протекающих в них процессах.
В настоящей статье описан метод прогноза и коррекции для моделирования нелинейных колебательных и автоколебательных систем томсоновского (резонансного) типа. Метод основан на использовании дискретной временной модели линейного резонатора (ДВ-осциллятора) в качестве основного динамического элемента системы. Нелинейности и обратные связи вводятся в ДВ-осциллятор способом структурного синтеза [6].
1. Вариант схемы прогноза и коррекции для колебательных систем
Значительное число нелинейных динамических систем можно описать дифференциальной моделью вида
d 2 x to o dx dt 2 Q dt
+ to o x — to o F
dx ) t , x , — I, dt J
где to o и Q - собственная частота и добротность линейного осциллятора, входящего в состав системы. Функция F ( ■ ) учитывает обратные связи и нелинейности системы. Предполагая в дальнейшем численное интегрирование задачи Коши для дифференциального уравнения (1) с шагом А, введем в уравнение безразмерную временную переменную т — t / А и запишем его в виде
d2x dx 2222
—-—+ 2nv + 4п Оqx — 4п О0F (т, x, у).(2)
d т2
Здесь О о — to o / to d — собственная частота, измеряемая в единицах частоты дискретизации to d — 2п / А; v — O o / Q - полоса резонатора. Временную производную осцилляций в (2) учитыва-
ет переменная
у (т) —
1 dx
2nO o d т
Рассмотрим «физически обоснованный» подход к разработке алгоритма численного интегрирования уравнения (2). Основным его положением
является требование о сохранении импульсного отклика h (т) линейного осциллятора, описываемого левой частью (2), в ходе временной дискретизации. При этом правую часть уравнения (2) формально предлагается считать внешним воздействием на осциллятор: f (т) = F ( т, x (т), у (т) ) .
Импульсный отклик (импульсная характеристика) осциллятора определяется уравнением d-h + 2nv — + 4n2Q 2 h = 4л2П 2 5(т).
d т2 d т 0 0
Более точную центральную разность предлагается использовать в комбинации «прогноз – коррекция», определив ее через прогнозируемое ( p )
значение xn как
( p )
y n - 1
( p ) n
- xn - 2
4nQ0
Полученная в рамках такого подхода схема прогноза и коррекции выглядит следующим образом:
x (p) - 2a cos ( 2nQ 0 ) x n - 1 + a2 x n - 2 =
Последовательность отсчетов hn = h (т n ) на временной сетке т n = n формирует импульсную характеристику линейного осциллятора в дискретном времени:
h n = 2kQo exp ( -nv n ) sin(2nQ0 n ), n = 0,1,2,...
Дискретное во времени преобразование Фурье (ДВПФ) последовательности (3) определяет ча- стотную характеристику
H ( j Q) =
2nQ0a sin(2nQ0) W ( j Q )
1 - 2a cos(2nQ0) W ( j Q ) + a2 W ( j 2Q ) ’
где W ( j Q ) = exp(- j 2nQ) — множитель задержки; a = exp(-nv) — множитель затухания.
В частотной области последовательности от- счетов осцилляций на выходе xn = x(n) и входе fn = f(n) представлены спектрами (ДВПФ) X (jQ) и F (jQ) . Известно, что спектры входного и выходного сигналов линейной систе- мы связаны частотной характеристикой как
X ( j Q ) = H ( j Q ) F ( j Q ) . Поэтому на основании (4)
можно записать выражение
( 1 - 2a cos(2nQ0) W ( j Q ) + a2 W ( j 2Q ) ) X ( j Q) = = 2nQ0a sin(2nQ0) W ( j Q ) F ( j Q).
Применив к (5) обратное ДВПФ, нетрудно восстановить связь последовательностей xn и fn :
x n -2a cos ( 2nQ 0 ) x n - i + a2 x n - 2 =
= 2nQ 0 asin ( 2nQ 0 ) f n - i .
С учетом того, что fn = F (n, xn, yn ), это равен- ство принимает вид xn-2a cos (2nQ0) xn-i + a2 xn -2 =
= 2nQ 0 asin ( 2nQ 0 ) F ( n - 1, x n - i , y n - i ) .
Способ аппроксимации производной y n - 1 в (6) определяет тип разностной схемы для сеточной функции xn . Аппроксимация левой разностью
( l ) = xn - 1 - xn - 2
y n - 1 2nQ0
позволяет получить простую явную схему, но имеет лишь первый порядок точности по Q 0 .
= 2nQ0asin (2nQ0) F (n - 1, xn-1, уn)-1), xn - 2a cos (2nQ) xn-1 + a2xn-2 =
= 2nQ 0 asin ( 2nQ 0 ) F ( n -1, x n - 1 , y n - 1 ) .
Теоретическая оценка точности разностной схемы (8) вызывает затруднения. Можно лишь отметить, что в работе [7] погрешность разностной аппроксимации дифференциального оператора в левой части уравнения (1) оценена как величина второго порядка малости. Также и погрешность разностной аппроксимации (7) 2 оценивается величиной, пропорциональной Q0 . Поэтому, условно определив (8) как схему второго порядка, оценим ее точность на конкретном примере.
2. Пример: осциллятор Ван дер Поля
В принятых выше обозначениях классическую модель автоколебательной системы – осциллятор Ван дер Поля – можно определить уравнением dx + 2nv — + 4n2Q2x = 4n2Q2Y(1 - x2)у. (9)
d т2 d т
Здесь параметр у характеризует глубину положительной обратной связи в системе. Он связан с параметром превышения порога генерации простым соотношением: p = у Q (порог генерации p = 1).
Для нелинейного осциллятора (9) схема прогноза и коррекции (8) имеет вид
x (p) - 2a cos ( 2nQ 0 ) xn - 1 + a2 xn - 2 =
= yasin ( 2nQ 0 ) ( 1 - x n - 1 ) ( x n - 1 - x n - 2 ) ,
2 (10)
xn - 2a cos ( 2nQ ) xn - 1 + a2 xn - 2 =
= 0.5yasin ( 2nQ 0 ) ( 1 - x n - 1 )( x n ) - x n - 2 ) .
Вычисления по (10) будем сопоставлять с вычислениями методами Рунге – Кутта четвертого порядка ( RK4 ) и Хойна (метод второ-
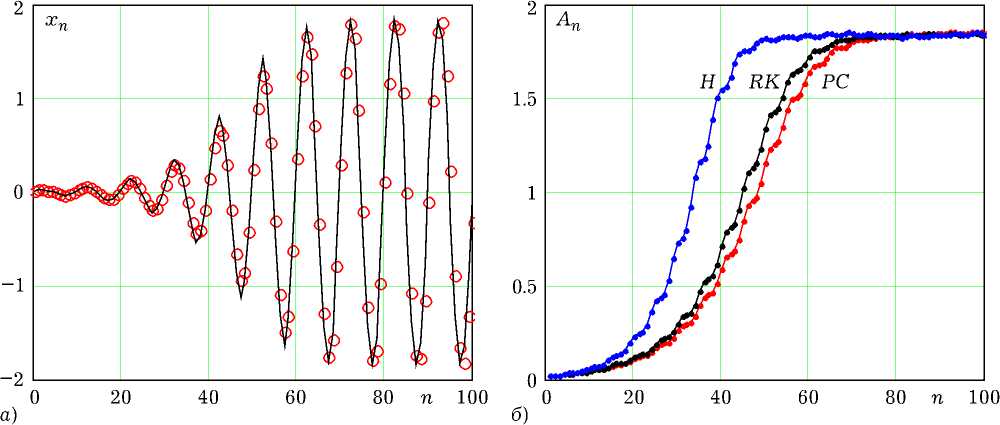
Рис. 1. Процесс установления автоколебаний
а) б)
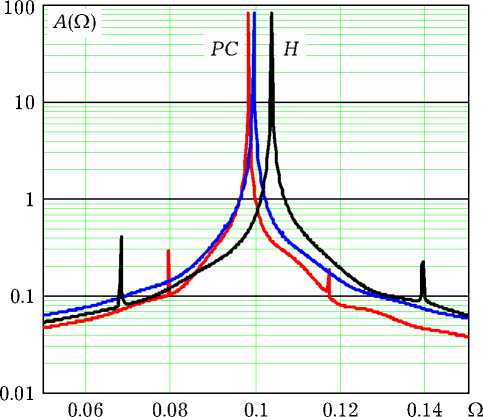
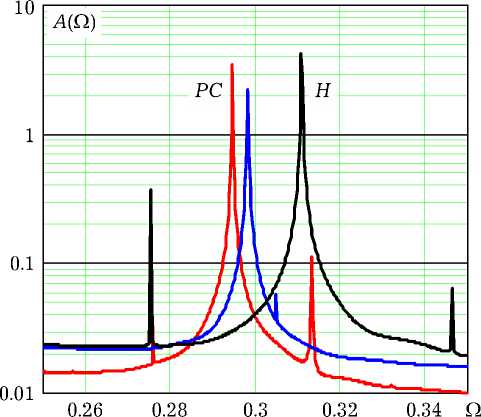
Рис. 2. Амплитудные спектры установившихся автоколебаний
го порядка). Метод RK4 , как наиболее точный, считается эталонным. При этом зафиксированы следующие значения параметров осциллятора Ван дер Поля: Q = 20 — типичное для автогенераторов значение; p = 7 — высокий уровень возбуждения; Qq = 0.1 — соответствует шагу интегрирования с десяти точками на период.
На рис. 1, а приведены графики процесса установления автоколебаний: точками отмечены значения xn , рассчитанные по методу (10), непрерывной линией – по методу RK4 . Временные зависимости огибающих в процессе установления показаны на рис. 1, б : РС – метод прогноза и коррекции (10); RK – метод Рунге – Кутта; Н – метод Хойна. Выделение огибающих проведено методом аналитического сигнала с использованием дискретного преобразования Гильберта.
Как следует из графиков, в переходном режиме результаты метода (10) более близки к результатам метода RK4 , чем к результатам метода Хойна. При этом все три метода дают практически одно и то же значение амплитуды установившихся автоколебаний.
Сравнение частот автоколебаний, рассчитанных тремя методами, проведем в спектральной области.
На рис. 2 показаны амплитудные спектры A (Q) = | Х ( j Q)| установившихся автоколебаний в окрестности частоты первой ( а ) и третьей ( б ) гармоник. Спектральные оценки получены 4096-точечным дискретным преобразованием Фурье. Они демонстрируют близость частот автоколебаний, рассчитанных методами (10) и RK4 : Q rk = = 0.0981 ± 0.0001; Q(1q) = 0.0994 ± 0.0001. Причем
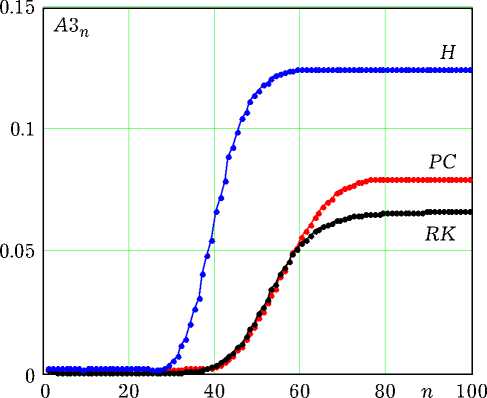
Рис. 3. Процесс установления амплитуды третьей гармоники эти частоты несколько ниже собственной частоты контура Ω0 = 0.1. Метод Хойна дает завышенное значение частоты: ΩH = 0.1035 ± 0.0001.
В качестве еще одной сравнительной характеристики методов можно использовать результаты генерации третьей гармоники автоколебаний. Временные зависимости ее амплитуды A 3 n , рассчитанные тремя анализируемыми методами, показаны на рис. 3. Метод (10) дает завышенное по сравнению с RK4 значение. Но еще большее превышение демонстрирует метод Хойна.
Таким образом, результаты приведенного тестового примера дают основания считать, что предложенная схема прогноза и коррекции (8) имеет преимущества в точности расчетов перед стандартными методами второго порядка.
Заключение
Описанный здесь метод может быть полезен в численных экспериментах с нелинейными осцилляторами [8], в том числе при наличии шумовых воздействий [9]. В последнем случае, учитывая необходимость обработки большого числа реализаций стохастических колебаний, рассматриваются варианты использования методов невысоких порядков, вплоть до модификаций метода Эйлера (см., например, [10]). Метод применим также для моделирования автоколебательных систем с запаздывающими связями, например, таких, как генератор, исследуемый в работе [11].
Отметим также, что результаты спектрального анализа численных решений указывают на то, что высшие гармоники основной частоты нелинейных колебаний в процессе дискретизации времени могут быть подвержены эффекту под- мены частот [12]. Так как в спектре нелинейных колебаний в большинстве систем присутствует третья гармоника, в качестве одного из условий адекватности численной модели можно принять условие ее генерации без эффекта подмены. Это означает ограничение на шаг временной дискретизации в виде неравенства ω0∆≤π/3, следующего из неравенства 3Ω0 ≤ 0.5.
Список литературы Метод прогноза и коррекции для моделирования автоколебательных систем
- Боголюбов Н.Н., Митропольский Ю.А. Асимптотические методы в теории нелинейных колебаний. Изд. 4-е. М.: Наука, 1974. 504 с.
- Ланда П.С. Нелинейные колебания и волны. Изд. 3-е. М.: Либроком, 2015. 552 с.
- Самарский А.А., Михайлов А.П. Математическое моделирование. М.: ФИЗМАТЛИТ, 2002. 302 с.
- Parker T.S., Chua L.O. Practical numerical algorithms for chaotic systems. N.-Y.: Springer-Verlag, 1989. 348 p. DOI: 10.1007/978-1-4612-3486-9
- Хайрер Э., Нерсетт С., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи. М.: Мир, 1990. 512 с.
- Зайцев В.В., Шилин А.Н. Отображения генератора Ван дер Поля-Дюффинга в дискретном времени // Вестник Самарского университета. Естественнонаучная серия. 2017. № 2. С. 51-59.
- Зайцев В.В., Карлов А.В., Карлов Ар.В. О численном моделировании томсоновских автоколебательных систем // Вестник Самарского государственного университета. Естественнонаучная серия. 2015. № 6. С. 141-150.
- Кузнецов А.П., Савин А.В., Седова Ю.В. Бифуркация Богданова - Такенса: от непрерывной к дискретной модели // Известия вузов. Прикладная нелинейная динамика. 2009. Т. 17. Вып. 6. С. 39-158.
- Нелинейные эффекты в хаотических и стохастических системах / В.С. Анищенко [и др.]. М.; Ижевск: Институт компьютерных исследований, 2003. 544 с.
- Фильтрация сигналов на фоне шума вблизи аттрактора / В.И. Нефедов, С.А. Решетняк, Г.Н. Третьяков [и др.] // Радиотехника и электроника. 2019. Т. 64. № 2. С. 175-180.
- DOI: 10.1134/S0033849419020165
- Балакин М.И., Рыскин Н.М. Мультистабильность и сложные колебательные режимы в генераторе с запаздывающим отражением от нагрузки // Письма в ЖТФ. 2019. Т. 45. Вып. 6. С. 33-35.
- DOI: 10.21883/PJTF.2019.06.47497.17551
- Зайцев В.В., Стулов И.В. О влиянии подмененных гармоник на динамику колебаний в дискретном времени // Известия вузов. Прикладная нелинейная динамика. 2015. Т. 23. Вып. 6. С. 40-46.
- DOI: 10.18500/0869-6632-2015-23-6-40-46
