Метод синтеза системы зонального сетецентрического управления транспортными процессами

Автор: Михеева Татьяна Ивановна, Михеев Сергей Владиславович, Головнин Олег Константинович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-4 т.18, 2016 года.
Бесплатный доступ
В статье описывается метод решения задачи синтеза системы, обеспечивающий мониторинг, сетецентрическое (зональное) управление, оптимизацию, анализ транспортных объектов, процессов и явлений.
Управление транспортными процессами, атрибутно-ориентированное проектирование, анализ транспортной инфраструктуры, модель транспортного потока, параметризация объекта
Короткий адрес: https://sciup.org/148204773
IDR: 148204773 | УДК: 004.9
Method of synthesis of zonal network-centric transport management system
The article describes the method for solving the problem of synthesis of system, providing monitoring, network-centric (zonal) management, optimization, analysis of transport objects, processes and the environment.
Текст научной статьи Метод синтеза системы зонального сетецентрического управления транспортными процессами
Современный мир всё в большей степени приобретает облик единого информационного пространства. Его бурное развитие диктует необходимость поиска новых решений, делающих возможным управление сложными процессами с нетривиальными структурами данных, и предоставления пользователю доступа к информации из любой точки этого пространства. Информация в современном мире является одним из наиболее востребованных ресурсов. Не являются исключением и системы управления транспортными процессами (ТрПр).
Система управления транспортными процессами включает в себя не только технические средства организации движения (светофоры, знаки), предназначенные для непосредственного управления транспортными потоками (ТрП), но и программное обеспечение, необходимое для организации диспетчерских центров, обеспечения обслуживающих организаций оперативной и достоверной информацией, визуализации состояния транспортной инфраструктуры (рисунок 1). Система управления объединяет средства сбора, хранения и анализа данных, поступающих с различных технических устройств (датчики, радарные детекторы, метеоинформационные системы) с перекрестков и других зон управления [1, 2].
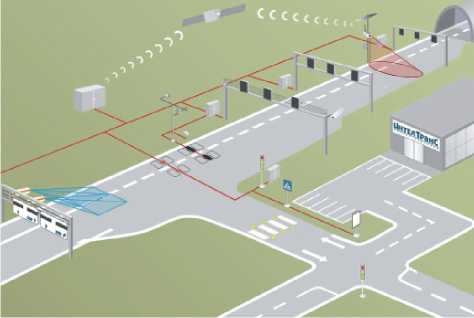
Рис. 1. Система управления транспортными процессами моделей управления транспортными процессами невозможно без пространственной привязки управляющих устройств – технических средств организации дорожного движения (ТСОДД), выявления топологических зон управления [3]. Хранение и манипулирование геопространственными и атрибутными данными моделей может с высокой степенью эффективности осуществляться в среде геоинформационной системы [2, 4], позволяющей построить геоинформационную модель транспортной сети урбанизированной территории, отражающей все изменения транспортной инфраструктуры (ТрИ) реального мира.
СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ
Процесс функционирования системы управления транспортными процессами предусматривает учет ряда показателей, характеризующих такое свойство системы, как качество управления, описываемое вектором критериев Q = {qi$Q2,...,Qm }, содержащим критериальные характеристики Q1,Q2,...,Qm их m-мерного пространства Cm [2]. Совокупность оценочных функций Q образует глобальный критерий оптимальности функционирования системы управления на основе зональных декомпозиций. Пространство всех возможных решений задачи управления характеризуется областью определения оценочных функций. При выборе наивысшего ранга управления, обеспечивающего управление всей транспортной инфраструктурой мегаполиса, важной задачей является определение степени взаимного влияния отдельных транспортных ситуаций, распределенных на урбанизированной территории.
Систему управления ТрПр, имеющую в своем арсенале геоинформационную систему, резонно строить не по иерархическому, а по сетецентрическому принципу [5, 6]. Согласно этому принципу, управление, а также каждый объект, явление или процесс транспортной инфраструктуры, статический или динамический, объединены в единое информационное пространство сферы управления, через которое происходит обмен информацией, объекты классов получают все необходимые сведения об имманентных свойствах и текущих параметрах объектов своего и чужих классов, что повышает эффективность управления, как отдельным объектом, группой объектов, так и всей системой в целом. При такой организации распределенные по большой территории объекты ТрИ могут постоянно получать новые данные о целях и действиях других объектов и процессов, прямо или косвенно влияющих друг на друга, а центр управления ТрИ – синтезируемая система – имеет реальную картину функционирования всей инфраструктуры в целом и информацию о состоянии наполняющих ее объектов. В плане оперативного управления географически распределенными объектами сетецентрическая операция основана на современных информационных сетевых технологиях [7], хорошо защищенных устойчивых каналах связи с высокой пропускной способностью, обеспечивающих мониторинг объектов и процессов [8], интеграцию различных по семантике зон управления и целеполагания в высокоадаптивную, глобальную интеллектуальную транспортную систему.
Наличие приоритета задач, решаемых составными частями системы, различие целей (критериев), которые должны достигаться на каждом ранге (слое) управления, диктует необходимость выделения рангов, на которых реализуются различные виды управления ТрПр, регламентируемые стандартизированными паттернами управления (рис. 2).
Ранг управления L – декомпозиционный слой системы, предназначенный для решения задач ZL , вытекающих из исходного множества целей управления Z* ={z 1,z2,...,zn}. Для выделения ранга управления множество критериальных характеристик C разбивается на RL попарно непересекающихся частей [9]. Таким образом, каждый ранг управления с соответствующей сте- пенью декомпозиции регламентируется некоторым вариантом синтеза подсистемы управления, заданным подмножеством CiL . Таким образом, оптимизацию Q можно рассматривать в виде последовательной оптимизации критериев EL на соответствующих подмножествах CiL , благодаря связи между глобальным критерием Q и совокупностью локальных критериев EL.
Полученную последовательность наилучших ~i вариантов СiL построения системы управления транспортными процессами, обеспеченную для всех необходимых рангов проектирования системы, запишем как
~
C d C d ... d С, N , где El ( C ,L ) = extr El ( C ) . (1) i 1 i 2 i N L
C L e C
Такая последовательность приводит к реше- нию задачи управления транспортными процессами, т.к. CN = Cj и в силу предположения о свойствах локальных критериев оптимальности Q(Cj) = extrQ(Cj) [9].
В дополнение к ранговой декомпозиции целей управления введем понятие зональной декомпозиции, позволяющей осуществить сублокальную оптимизацию управления внутри некоторой зоны параметров данного ранга си- стемы управления.
Зона управляющего воздействия Л - декомпозиционный элемент некоторого ранга (уровня) управления L системы, предназначенный для A решения задач ZL , вытекающих из исходного множества целей управления Z ={ z 1,z 2,..., zn}.
Расширение зоны управляющего воздействия внутри одного ранга происходит за счет объединения зон при неизменном ранге одного или многих критериев оптимизации.
В задаче оптимизации сравнение решений по предпочтительности осуществляется с помощью заданных на множестве ^ решений числовых функций (частных критериев) ^ . Каждое решение характеризуется значением W = ^.(U ) . Выбор оптимального решения сводится к нахождению оценки из множества
Q ( U ) = J w G C m w = Q (U ), U e^l , (2)
где w – один из показателей качества управления.
Например, УДС делится на различные по виду управления и размерам зоны, в которых необходимо проводить мониторинг и контроль параметров отдельных объектов ТрИ, выявить наиболее загруженные участки УДС, очаги аварийности – места концентрации дорожно-транспортных происшествий, изменить дислокацию технических средств организации дорожного движения, откорректировать структуру све-
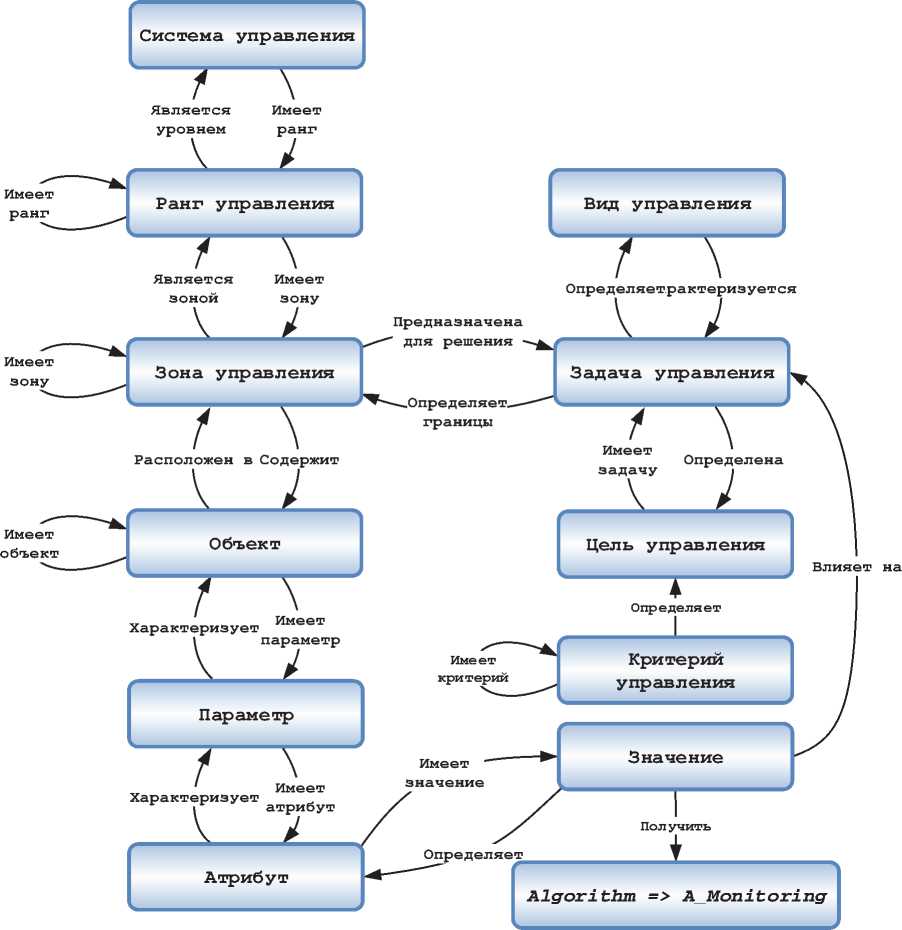
Рис. 2. Паттерн управления транспортными процессами
тофорного цикла для повышения пропускной способности участка УДС.
Метод сетецентрического управления (рис. 3) представлен последовательностью шагов, обеспечивающих управление, как отдельными объектами ТрИ, определенными атрибутами этих объектов, зоной и рангом управления, так и всей системой управления транспортной инфраструктурой в целом.
Шаг 1. Определение необходимости управления
На данном этапе по параметрам и статистике данных об объектах ТрИ определяется необходимость управления, исходя из уровня безопасности участка УДС.
Шаг 2. Определение ранга управляющего воздействия, вида зоны и вида управления
Определяются ранг управления L, виды зоны управления, вид и параметры управления, вытекающие из исходного множества целей управления Z * = {z 1, z 2,..., zn}. Вид управления U = {и 1,и2,...,ип} определяется, например, исходя из уровня безопасности участка УДС, вида конкретного управления, необходимости мониторинга параметров транспортных потоков, ограничениями, накладываемыми на параметры объектов ТрИ [10-12].
Шаг 3. Определение атрибутов объектов и параметров ТрИ
Выполнение задач Z = {z 1,z2,...,zn} , решаемых на данном этапе, подразумевает определение атрибутов управляющих и управляемых объектов, обобщенных параметров функционирования ТрИ, влияющих на эффективность управления в выбранной зоне с учетом граничных значений. Локальные критерии ^ = UL,8^,...,s^L }, необходимые для оценки L 12 rL свойств вариантов декомпозиционных элементов, строятся на основе глобального критерия

Определение необходимости управления

Определение ранга, вида и зоны управления

Определение атрибутов объектов и параметров Три
Формирование целевой функции
Определение принципа выделения зоны управления

Построение алгоритмов управления
Построение паттерна определения весовых коэффициентов
Рис. 3. Метод сетецентрического управления транспортной инфраструктурой оптимальности и оценивают способность разработанных вариантов СiL системы выполнять задания ZL данного ранга декомпозиции системы.
В качестве агрегированного параметра ТрИ, характеризующего и влияющего на управление, как отдельными объектами, так и явлениями и сложными процессами, протекающими на улично-дорожной сети, принимаем индикатор, который определим как индекс эффективности n управления f (w) = ^а, • wz . Индекс эффек-i=1
тивности управления (рис. 4) зависит от многих факторов, обеспечивающих оптимальное, безопасное и гармоничное функционирование ТрИ, среди которых немаловажная роль отводится безопасности движения транспортных средств (риску возникновения дорожного-транспорт-ных происшествий), параметрам объектов ТрИ, влияющим на величину средней транспортной задержки D , необходимой и достаточной дислокации технических средств организации дорож- ного движения, законопослушности участников дорожного движения [13–16].
На данном шаге используются методы, формирующие матрицы атрибутов и их рангов ( Algorithm ⇒ A_ExpertEvaluation ), методы построения значимости параметров объектов в процессе обеспечения безопасности и управления движением ( Algorithm ⇒ A_Signifi cantParameters ).
Метод управления движением включает в себя использование таких параметров транспортных потоков, как интенсивность Ik , скорость vi , параметров УДС: конфликтные точки на пере-~ крестке pX,j. Конфликтные точки делятся на ~ ~
-
9 , j 9 , j
точки ответвления ps , слияния Ри и пересечения p9,j . Типы и количество конфликтных точек на разных типах перекрестков представлены на рисунках 5–7.
Количество и тип конфликтных точек опре- деляют максимальную сложность i-го участка
~ ~ ~ ~ ~ ~ ~ ~
θ θθ θθ θθ
УДС pXi = k θ s ⋅ psi + ku θ ⋅ pui + kc θ ⋅ pci , где p θ s i
θ количество точек ответвления, pui слияния и ~
θ pñi пересечения, коэффициенты уровня опас-
9 9 9
ности конфликтной точки ks , ku , kc , соответ ственно [4].
Шаг 4. Формирование целевой функции
n
f ( w ) = Е а- w . (3)
, = 1
Определяются значения в есовых коэффициентов α и оценки w ∈ W управления объектами ТрИ:
-
w – числовое значение атрибута объекта ТрИ;
α – весовой коэффициент, показывающий, уровень значимости объекта ТрИ w в рамках множества всех рассматриваемых в данной зоне управления параметров.
Целевая функция (3) управления функционированием объектов транспортной инфраструктуры формируется, исходя из набора атрибутов этих объектов, включенных в индекс эффективности управления ТрИ, сводится к определению зон и задач, входящих в указанные на рисунке 4 индикаторы, и их веса (значимости) в общем наборе выбранных параметров. Индекс гармони-зированности потока формируется при слиянии двух значимых индексов: индекса оптимального управления потоками и индекса законопослушности участников дорожного движения. Целевая функция формируется из объектов, в наибольшей

Рис. 4. Метод формирования индекса эффективности управления транспортными процессами
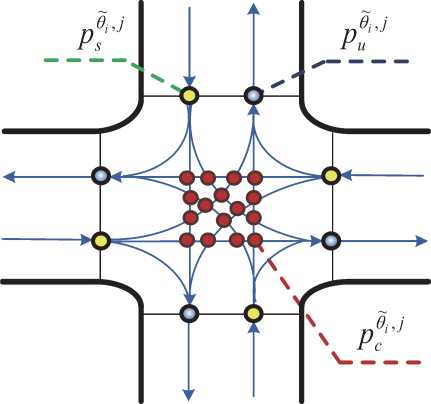
Рис. 5. Конфликтные точки на классическом перекрестке
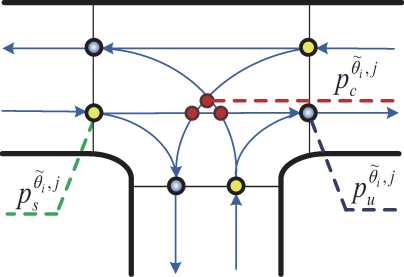
Рис. 6. Конфликтные точки на Т-образном перекрестке
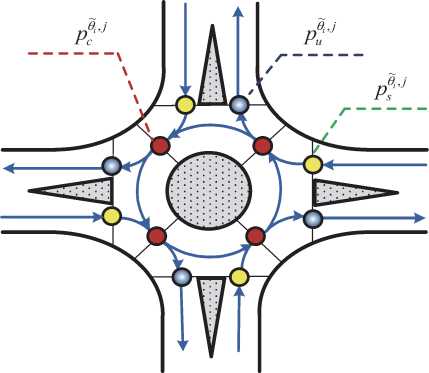
Рис. 7. Конфликтные точки на кольцевом перекрестке степени значимых в данной зоне управления, и при расширении зоны управления – в идеале – всех, влияющих на главный показатель, объектов и выявлению их значимости a i .
По значению индекса эффективности управления в заданной зоне из библиотеки выбирается соответствующий метод управления, который
обеспечивал бы оптимум функции цели Z .
Глобальный критерий оптимального управления образуется из совокупности оценочных функций Q , область определения которых
характеризует пространство всех возможных решений задач управления для различных зон. Критерии качества выстраиваются в зоны согласно соответствующему уровню локальной цели управления z i .
Оценку w0 е W будем называть оптимальной (по <) относительно W , если не существует
оценки w е W такой, что:
V i : w i < w 0;
m
—Eai( wi- w0) >0, i=1
где a i - весовые коэффициенты.
В случае использования метода главного критерия исходная задача сводится к задаче оптимизации по одному (глобальному) критерию Q l :
Q i ( U ) ^ min, U еЖ ;
m
- ^ al ( Q i (U ) -Q , ( U о ) ) > &, при Q.(U о ) = W-, i = 1
где ^ o - ограничение.
Г (5)
Шаг 5. Определение принципа выделения зоны управления
На данном этапе определяется, по какому принципу происходит выделение зоны управления, используется тот или иной метод управления, выбираемый из библиотеки управления.
Применяются методы определения границ зоны управления, вида и параметров управления. Паттерн управления U = { и 1 , u 2,..., ип } (вид управления) определяется, исходя из необходимости мониторинга параметров объектов транспортной инфраструктуры, ограничений, накладываемых на параметры объектов ТрИ (уровня безопасности участка УДС), вида конкретного управления транспортными потоками и перевозочным процессом.
Для выделения зоны управления множество критериальных характеристик ранга управления L системы E = СiL разбивается на RA попарно непересекающихся частей. Полученные подмножества EiA соответствуют зонам распространения управляющего воздействия.
Алгоритм последовательной оптимизации сублокальных зональных критериев ζ A на соответствующих подмножествах EiA Z A = { Z 1 , Z 2 ,-•-, Z m } строится на основе связи глобального критерия Ω и совокупности локальных ε L и зональных критериев ζ A [2].
Шаг 6. Построение алгоритмов управления
На основе паттерна управления выполняется построение алгоритмов управления транспортными потоками, светофорными объектами, дорожными знаками, заторами и другими объектами, явлениями и процессами ТрИ.
Задача расчета управляющих воздействий состоит в нахождении U , обеспечивающего выполнения в смысле (4) условия:
Q i (U ) ^ min , при U е^ . (6)
Каждая задача скалярной оптимизации решается независимо одна от другой, в результате чего получаем m оптимальных точек. Известно, что условию (6) в смысле (4) удовлетворяет ряд значений U ∈ ℜ , образующих множество Парето [2]. Для получения однозначного решения задачи необходимо провести анализ приоритета (важности) отдельных компонентов Ω и определить критерий предпочтения. Одним из возможных путей сведения многокритериальной задачи к однокритериальной является использование весовых коэффициентов и перевод ряда компонент в состав ограничений. Смысл подобной постановки задачи заключен в том, что система управления должна минимизировать один из показателей. Следует отметить, что решение задачи (5) является и слабоэффективным решением задач (4, 6), а если оно единственно, то и эффективным (по ≤ ).
Шаг 7. Построение паттерна определения весовых коэффициентов
Построение паттерна математического метода искусственного интеллекта определения весовых коэффициентов, основано на нейронных сетях, экспертных оценках, предикатах.
В качестве паттерна метода определения весовых коэффициентов используем паттерн «Информационный эксперт ИТС» . Информационный эксперт – класс объектов транспортной инфраструктуры ИТС, владеющий имманентной атрибутикой свойств (информацией) и обладающий функциональной спецификацией свойств (операциями), распределяет функциональные обязанности выполнения той или иной операции между классами, обладающими необходимыми способностями к выполнению возлагаемых на них обязательств. В качестве информационного эксперта используются классы объектов транспортной инфраструктуры различного назначения.
Информационный эксперт ИТС метода автоматического построения графовой модели УДС по слою участков электронной карты ( Algorithm ⇒ A_NetworkAutoCreate ) [17]. Информационный эксперт хранит информацию об объектах УДС, в силу распределения хранения которых, появляется необходимость в средстве централизованного хранения, доступа и редактирования информации. В методе использованы информационные эксперты, отвечающие за объекты разных типов: участки Θ , узлы V и дуги E графовой модели УДС.
Информационный эксперт ИТС метода принятия решения о перераспределении транспортных потоков ( Algorithm ⇒ A_FlowDistributionDecision ) [17]. Появление гибких целей управления транспортным процессом (проведение культурно-массового мероприятия, проезд охраняемой автоколонны, возникновение инцидента на УДС и др.) приводит к необходимости перераспределения ТрП на УДС. В качестве исходных данных для метода A_FlowDistributionDecision используется граф УДС, представленный экземпляром класса «Граф_УДС» , и гибкая цель, представленная атрибутом класса «Дерево_целей» . Атрибуты объектов класса «Граф_УДС» агрегируются в классе «Дерево_целей» (рис. 8), предназначенного для достижения гибкой цели путём решения задачи поиска оптимального плана управления.
Класс «Дерево_целей» осуществляет поиск оптимального плана перераспределения транспортных потоков и выдает рекомендации по управлению. Реализация паттерна обеспечивает обработку значений атрибутов графа УДС для достижения гибкой цели с помощью формирования множества целей управления – объектов класса «Цель_управления» , определенных не только целью, но и конкретным алгоритмом управления.
Класс «Дерево_целей» использует в качестве основных методов Algorithm ⇒ A_Постро-
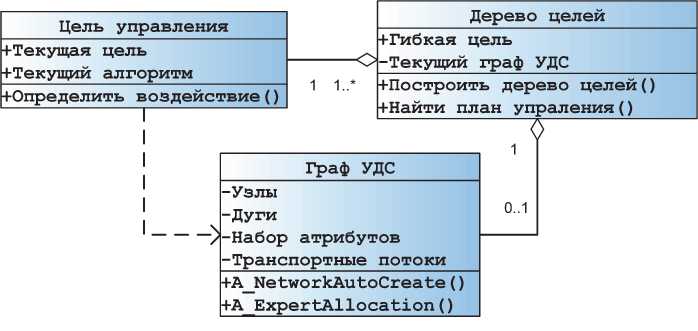
Рис. 8. Диаграмма реализации паттерна «Информационный эксперт ИТС»
ить_дерево_целей и A_Найти_план_управления , являющихся расчетными процедурами данного класса. Атрибут Текущий_алгоритм – параметр, идентифицирующий метод поиска способа достижения текущей цели управления, определенной атрибутом Текущая_цель .
Шаг 8. Анализ транспортной инфраструктуры на основе зональности атрибутов
Анализ функционирования транспортной инфраструктуры подразумевает определение уровня состояния объектов ТрИ, находящихся в зонах управления A различных рангов L : нормальное состояние, состояние затрудненного управления, аварийное состояние.
Выработанное из библиотеки управляющее воздействие ui отличается от того воздействия на объект U , которое обрабатывается исполнительным механизмом. Это связано с тем, что время реализации отлично от нуля [18]. Выбор управляющего воздействия ui из области допустимых U = { u i } , i = 1,2,..., n происходит в соответствии с заданной целью управления Z * и алгоритмом ф :
U = ф ( X , Y\ Z * , Т ) , (7)
A где X – атрибуты объектов и процессов ТрИ [19];
Y – состояние объекта управления;
Т - параметры окружающей среды.
Одной из особенностей рассматриваемой модели является то, что ее объект активный, т.е. состояние Y ' объекта зависит не только от характеристик Т среды и воздействий U , но и от параметров X A , которые изменяются в зависимости от имманентных целей Z^O объекта. Эти цели, как правило, отличаются от целей управления Z * системы. Таким образом, состояние Y объекта управления является функцией характеристик окружающей среды Т , воздействий U , параметров X A : Y = F ( X A , Y ,U, Т ) .
Для подсистемы управления транспортными потоками можно выделить три класса ситуаций на УДС:
. нормальное состояние YO – свободный поток;
. ситуация затрудненного управления YC – насыщенный поток;
. аварийная ситуация YJ – состояние затора.
Поддержание эффективности системы при переходе от одного класса ситуаций к другому связано с принятием решения об изменении управления ui [4]. Реализуемое в большинстве подсистем жесткое многопрограммное управление характеризуется в основном тем, что в его основе лежит модель объекта Yt = F(Ut , Y t .-д t, X A ) . Воздействия Ut выбирают из библиотеки управляющих воздействий – некоторого фиксированного набора параметров X A . Коррекция сводится к пересмотру X A в моменты времени, интервалы между которыми значительно превышают шаг управления Д t = ( t i — t i - 1 ) .
В существующих системах состояние объекта характеризуется с помощью информации, поступающей от детекторов транспорта, установ-
X ленных на участках Q i улично-дорожной сети. На основе этой информации рассчитываются значения интенсивности Ik и скорости потока vi в этих точках.
При гибком управлении модель представляется как
-
Y ‘ = F ( X -A — д , • Y ' —д, • X A - U ) , U i е U R , (8)
где U R – множество допустимых управляющих воздействий.
Шаг 9. Выбор подсистемы управления объектами ТрИ в зоне Ai
Выполнение задач Z = { z 1, z 2,..., zn}, ре -шаемых на данном шаге, характеризуется качеством управляющих воздействий на ТрП 8L = {s,1L, 8^ ,...,8^ } - набором критериев управления, таких как: длительность транспортной задержки D, длина очередей у перекрестка Q) , безопасность движения, запрещенный проезд на красный свет светофора, превышение допусти- мой скорости движения и др. В зависимости от выбранного критерия управления определяется метод и подсистема, предназначенные для решения задачи zi в зоне Ai [4].
Между отдельными критериями оптимизации, как в количественном отношении, так и в качественной оценке управления существуют определенные зависимости. Перечисленные критерии находятся в тесной функциональной зависимости от времени задержки D .
При выборе перекрестка в качестве зоны управления A одним из возможных видов управления является оптимальное распределение транспортных потоков, находящихся в зоне Ai действия светофорного объекта. Функционирование перекрестка описывается следующими атрибутами управления транспортными процессами [4]:
-
. множество допустимых состояний ТрП Y = { yt } , i = 1,2,..., n ;
-
. множество допустимых управлений U = { u i , u ...... U n } ;
-
. алгоритм перехода из одного состояния в другое в соответствии с выбранным методом управления yt + i = ф{y t , u } ;
-
. функция цели Z * (Y ) .
Например, на основе модели управляемого перекрестка, руководствуясь поставленной задачей по определению зоны оптимального применения управляющих алгоритмов, необходимо найти такой метод управления ТрП, который обеспечивал бы оптимум функции цели, т.е. в соответствии с выбранным критерием эффективности управления, – минимум транспортной задержки D ( Algorithm ^ A_CoordLightMinDelay ). Функция цели может быть задана суммой оценочных функций D i = ф ( y i , y i + 1 ) , получаемых при каждом переходе из состояния yi в состояние
T - 1
y „i: Z " ( Y ) = 2 D , .
i = 0
РЕЗУЛЬТАТЫ
Эффективность сетецентрического управления транспортными процессами рассмотрим на примере г. Сургут. Сургут является самым большим по численности и самым автомоби-лизированным городом в Ханты-Мансийском автономном округе – Югре. По данным переписи населения 2015 г. в Сургуте проживает около 340 тыс. человек, уровень автомобилизации на 2015 г. по данным Госавтоинспекции – около 520 ТрС на 1000 жителей.
На основе проведенных исследований выработаны рекомендации по изменению существующей организации дорожного движения на улично-дорожной сети г. Сургута, которые позволили повысить безопасность движения, снизить уровень аварийности на 7,29%, повысить пропускную способность транспортной сети в среднем на 13,7%. По результатам внедрения программного обеспечения был разработан проект организации дорожного движения, согласно которому необходимо установить 6235 дорожных знаков, 138 светофоров, 28,1 км пешеходных ограждений, 37 радарных детекторов. В среднем для г. Сургута транспортная задержка снизилась на 12 с на один участок УДС [20]. Годовая экономия составит 24540 транспортных часов, что согласно [21] приводит к возникновению общего годового экономического эффекта – 119 975 тыс. руб.
ЗАКЛЮЧЕНИЕ
Разработан метод синтеза системы мониторинга, сетецентрического (зонального) управления, оптимизации, анализа транспортных объектов, процессов и явлений. Разработанный метод позволяет понять природу и характеристики транспортных потоков, исследовать транспортные процессы после введения управляющих воздействий.
Список литературы Метод синтеза системы зонального сетецентрического управления транспортными процессами
- Бурков С.М., Маркелов Г.Я., Пугачев И.Н. Задачи системного анализа и методология формирования интеллектуальной системы управления транспортным комплексом города//Вестник Тихоокеанского государственного университета. 2013. № 4 (31). С. 83-90.
- Михеева Т.И. Структурно-параметрический синтез интеллектуальных транспортных систем. Самара: Самар. науч. центр РАН, 2008. 380 с.
- Cantarella G.E. Day-to-day dynamic models for Intelligent Transportation Systems design and appraisal//Transportation Research Part C: Emerging Technologies. 2013. Т. 29. P. 117-130.
- Михеева Т.И., Михеев С.В., Головнин О.К. Параметризация управляющих объектов урбанизированной территории//Известия Самарского научного центра Российской академии наук. 2015. Т. 17. № 2 (5). С. 1058-1062.
- Затуливетер Ю.С., Фищенко Е.А. Графодинамические системы с сетецентрическим управлением в математически однородном поле компьютерной информации//Управление большими системами. 2010. № 30.1. С. 567-604.
- Амбарцумян А.А. Сетецентрическое управление на сетях Петри в структурированной дискретно-событийной системе//Управление большими системами: сборник трудов. 2010. № 30.1. С. 506-535.
- Мультиагентные технологии для разработки сетецентрических систем управления/А.В. Иващенко, О.В. Карсаев, П.О. Скобелев, А.В. Царев, Р.М. Юсупов//Известия ЮФУ. Серия: Технические науки. 2011. № 3 (116). С. 11-23.
- Ризванов Д.А., Юсупова Н.И. Интеллектуальная поддержка принятия решений при управлении ресурсами сложных систем на основе многоагентного подхода//Онтология проектирования. 2015. Т. 5. № 3 (17). С. 297-312.
- Рапопорт Э.Я. Структурное моделирование объектов и систем управления с распределенными параметрами. М.: Высш. шк., 2003. 299 с.
- Апатцев В.И., Лысиков М.Г., Ольшанский М.А. Идеология интеллектуального управления сложными транспортными системами//Наука и техника транспорта. 2014. № 2. С. 62-64.
- Бородакий В.Ю. Разработка модели и метода решения задачи размещения центров обработки данных в сетецентрической системе//Вестник РУДН. Серия: Математика. Информатика. Физика. 2009. №3. С. 25-33.
- Гатиятуллин М.Х., Загидуллин Р.Р. Интеллектуальная транспортная система для крупных городов//Вестник НЦБЖД. 2010. № 5. С. 76-82.
- Комаров В.В. Методические особенности разработки архитектуры интеллектуальных транспортных систем//Известия Московского государственного технического университета «МАМИ». 2012. Т. 1. № 1. С. 130-138.
- Yang W.D., Wang T. The Fusion Model of Intelligent Transportation Systems Based on the Urban Traffic Ontology//Physics Procedia. 2012. Т. 25. P. 917-923.
- Kolosz B., Grant-Muller S., Djemame K. Modelling uncertainty in the sustainability of Intelligent Transport Systems for highways using probabilistic data fusion//Environmental Modelling & Software. 2013. Т. 49. P. 78-97.
- Жанказиев С.В. Обоснование определения зоны оптимальной установки для интеллектуальной транспортной системы//Вестник МАДИ. 2010. № 2. С. 100-106.
- Михеева Т.И., Головнин О.К., Федосеев А.А. Паттерновое проектирование интеллектуальных транспортных систем //Современные проблемы науки и образования. 2012. № 6. URL: http://www.science-education.ru/106-7967 (дата обращения 10.09.2016).
- Михеева Т.И., Сапрыкин О.Н. Идентификация зависимостей и пространственно-распределенных данных с использованием нейросетевых технологий//Вестник Самарского государственного технического университета. Серия: Технические науки. 2007. № 1(19). С. 40-47.
- Омарова Г.А. Основные этапы процесса прогнозирования и планирования транспортных потоков//Проблемы информатики. 2012. № 3. С. 62-68.
- Оценка социально-экономического эффекта публикации открытых данных на примере данных общественного транспорта Москвы/Р.Е. Артамонов, С.Б. Датиев, А.Б. Жулин и др. М.: Изд. дом Высшей школы экономики, 2015. 92 с.
