Методология агентного моделирования развития территориальных систем лесозаготовительного производства

Автор: Гулин К.А., Дианов С.В., Алферьев Д.А., Дианов Д.С.
Журнал: Экономические и социальные перемены: факты, тенденции, прогноз @volnc-esc
Рубрика: Отраслевая экономика
Статья в выпуске: 6 т.17, 2024 года.
Бесплатный доступ
В работе исследуются методологические и практические аспекты создания агент-ориентированных моделей, обеспечивающих поддержку принятия решений по развитию территориальных систем лесозаготовительного производства. Целью исследования является развитие методологии агент-ориентированного моделирования, направленной на разработку моделей территориальной системы лесозаготовки. Научная новизна и значимость исследования заключаются в создании специализированных подходов к разработке моделей лесозаготовительных систем, в которых проработаны вопросы создания пространственной сети, возможностей ее интеграции с геоинформационными системами, обеспечения возможности адаптации к сервис-ориентированному подходу при формировании элементов, обеспечение возможности формирования поведения агентов в части использования пространственных элементов модели. Рассматриваются задачи по развитию территориальных систем лесозаготовительного производства в России, в том числе создания эффективной транспортно-логистической сети. Анализируется инструментарий, применяющийся для решения обозначенных задач. В большинстве исследований сформулирована одна и та же цель - снижение общих эксплуатационных затрат на заготовку древесины. В связи с этим агент-ориентированное моделирование может претендовать на роль значимого инструментария для решения названной задачи. Главной проблемой является отсутствие методологической основы построения моделей, поэтому говорить о возможности создания единой методологии на текущий момент нельзя, перечень решаемых задач зачастую является необозримым. При этом имеется возможность сузить спектр решаемых вопросов за счет концентрации внимания на отдельных предметных областях. Исходя из этого, авторы анализируют существующие подходы к созданию агентных систем и на их основе формулируют собственный подход к созданию агент-ориентированных моделей территориальных систем лесозаготовительного производства. Представлен алгоритм конкретных шагов и стадий, необходимых для проектирования и реализации агент-ориентированных моделей. Он включает разработку контекстной диаграммы моделируемой системы, методику формирования концептуальной и функциональной структуры модели, инвариантной к инструментарию агент-ориентирован-ного моделирования. Рассматриваются аспекты построения пространственной среды моделей на основе интеграции моделей с геоинформационными системами. На текущий момент создан концепт агент-ориентированной модели лесозаготовок на территории Бабушкинского муниципального округа Вологодской области, в среде моделирования AnyLogic проработаны основные аспекты его реализации. Для создания полноценной модели необходима заинтересованность со стороны лиц, способных обеспечить предоставление реальных данных.
Система лесозаготовки, транспортная доступность лесных ресурсов, транспортно-логистическая сеть, методология агент-ориентированного моделирования, сервис-ориентированный подход
Короткий адрес: https://sciup.org/147247182
IDR: 147247182 | УДК: 630:330.4 | DOI: 10.15838/esc.2024.6.96.10
Agent-based modeling methodology for the development of territorial logging systems
The paper examines methodological and practical aspects of designing agent-based models that support decision-making on the development of territorial logging systems. The aim of the study is to design an agent-based modeling methodology to create models for a territorial logging system. Scientific novelty and significance of the research consist in the creation of specialized approaches to designing logging systems models, in which we elaborate on creating a spatial network, possibilities of its integration with geoinformation systems, ensuring the possibility of adaptation to a service-based approach in the formation of elements, enabling the formation of agents’ behavior in terms of using spatial elements of the model. We consider tasks related to the development of territorial logging systems in Russia, including the creation of an effective transport and logistics network. We analyze the toolkit used to solve the abovementioned tasks. Most studies have formulated the same goal - to reduce the total operating costs of harvesting wood. In this regard, agent-based modeling can claim to be a significant tool for solving this task. The main problem is lack of a methodological basis for building models; therefore, so far it is premature to talk about the possibility of creating a unified methodology, the list of tasks to be addressed is often endless. At the same time, it is possible to narrow the range of issues at hand by focusing on individual subject areas. Thus, we analyze existing approaches to the creation of agent-based systems and formulate our own approach to the creation of agent-based models of territorial logging systems. We put forward an algorithm of specific steps and stages to design and implement agent-based models. It includes creating a contextual diagram of the simulated system, a methodology to form a conceptual and functional structure of the model that is invariant to the tools of agent-based modeling. We consider constructing a spatial environment for models by integrating them with geoinformation systems. At the moment, the concept of an agent-based logging model has been created for the territory of Babushkinsky Municipal District of the Vologda Region, the main aspects of its implementation have been worked out in AnyLogic modeling environment. In order to desing a full-fledged model, there must be interest on the part of those who can provide actual data.
Текст научной статьи Методология агентного моделирования развития территориальных систем лесозаготовительного производства
В ключевых стратегических документах по развитию российского лесного комплекса предусмотрен его переход на модель устойчивого развития, обеспечивающую удовлетворение общественных потребностей в древесном сырье и других лесных ресурсах, сохранение экологической и социально-экономической роли лесов на основе использования современных научно-технических достижений, коренного обновления всех направлений деятельности и безубыточного лесного хозяйства1. В качестве важнейшего направления долгосрочной государственной политики в РФ определена интенсификация использования и воспроизводства лесов2.
Интенсивная модель отражает ведение устойчивого лесного хозяйства, обеспечение неистощительного лесопользования, увеличение экономической отдачи, сохранение биологических функций лесов. Ее применение связано с необходимостью решения задач по созданию устойчивой сырьевой базы на доступных территориях для переработки, по формированию сбалансированного внутреннего и внешнего рынков спроса на лесную продукцию, по обеспечению условий для долгосрочных инвестиций в лесной фонд и переработку, по реализации экономической модели интенсивного воспроизводства лесов, созданию системы долгосрочного планирования на всех уровнях лесного хозяйства (Русецкая, Санина, 2023).
Российская Федерация является мировым лидером по площади лесов, на ее территории находится свыше 20% всех лесов планеты3. По данным экспертной оценки Рослесинфорга, общая стоимость всех лесных ресурсов России на конец 2022 года равнялась 73,3 трлн рублей. Общая стоимость запасов древесины, которые можно использовать в коммерческих целях (вывоз и торговля древесиной и лесоматериалами, использование леса в качестве топлива) составляла 2,2 трлн рублей4. В 2022 году отпуск сырья увеличился на 1 млн м3, а с 2023 года объем лесных древесных ресурсов, ежегодно вводимых в экономический оборот, планируется увеличить в 30 раз, что приведет к увеличению числа объектов лесосечного фонда, доступных для новой аренды5.
Однако полноценное, но вместе с тем рациональное освоение этих запасов составляет существенную проблему. Если по запасам лесного фонда Россия находится на первом месте в мире, то по объему заготовки древесины – только на пятом. Так, в 2020 году в США было заготовлено 429,7 млн м3 леса (11,0% мирового объема), в Индии – 351,8 млн м3 (9,0%), в Китае – 341,7 млн м3 (8,7%), в Бразилии – 266,3 млн м3 (6,8%), в России – 217,0 (5,5%) (Русец-кая, Санина, 2023). Соседняя с Россией Финляндия, располагая лишь 0,5% лесных ресурсов планеты, осуществляет 1,5% от общего объема лесозаготовки (Русецкая, 2022).
По России в целом отношение фактического объема заготовки древесины к установленному допустимому объему ее изъятия (расчетной лесосеке6) в период с 2019 по 2021 год составляло в среднем 30,1%7. В отдельных регионах страны этот показатель еще ниже. Так, например, в Республике Коми в 2022 году расчетная лесосека была освоена на 28,3%8. В Томской области в 2020 году этот показатель составлял 18%9. В Арктической зоне РФ в 2021 году расчетная лесосека была освоена на 19,9%10. В Дальневосточном федеральном округе уровень освоения расчетной лесосеки составляет лишь 10,7%11.
Во многом такая ситуация связана с тем, что объем экономически доступной лесосеки значительно ниже по сравнению с той, которая определена в качестве расчетной (Орлов и др., 2022). По примерным оценкам, площадь экономически доступных лесов, в которых возможно получение прибыли при лесопользовании, не превышает 1/5 площади лесов страны12. Одним из основных факторов, определяющих экономическую доступность лесных ресурсов, является транспортный, формирующий значительную долю затрат, связанных с производством лесопродукции (Прядилина, Петров, 2020, с. 152).
Недостаточно высокая степень развитости транспортной инфраструктуры и транспортной освоенности лесов сдерживает рост лесной промышленности и снижает уровень ее инвестиционной привлекательности. Так, например, в Северо-Западном федеральном округе существующие лесовозные магистрали составляют по протяженности лишь 29% от требуемого количества, а в целом технологическая сеть веток по протяженности – 36% от величины, требуемой для полного транспортного освоения лесов СЗФО (Бжеленко и др., 2021). В связи с этим развитие лесной транспортной инфраструктуры, и строительство лесовозных дорог в частности, является важнейшей задачей для российского лесопромышленного комплекса (Бжеленко и др., 2021).
Традиционные методики проектирования транспортных сетей ориентированы на проектирование лесных дорог экстенсивной модели лесопользования, не уделяют должного внимания транспортному обеспечению задач интенсивной модели. По некоторым оценкам, общая требуемая протяженность автомобильных дорог общего пользования, лесных магистралей, веток и усов на единицу площади при интенсивной модели (20,5 км / 1000 га) почти в два раза выше, чем при экстенсивной модели (11,8 км / 1000 га) (Ларин и др., 2022).
Оптимизация транспортно-логистической сети выступает одним из важных аспектов планирования цепочки поставок. В лесной промышленности, поскольку транспортировка является основной статьей затрат на поставку сырой древесины, при планировании транспортировки распределение должно осуществляться таким образом, чтобы свести к минимуму общее перемещение древесины. Снижение транс- портных расходов за счет передового планирования и повышения эффективности послужило стимулом для исследователей. Значительная часть исследований была посвящена разработке методологии планирования и систем поддержки принятия решений для выполнения крупных и сложных задач маршрутизации транспортных средств при транспортировке лесоматериалов или круглых лесоматериалов (Audy et al., 2022).
Для оптимизации логистики в лесной промышленности используются различные методы, включая систему поддержки принятия решений (DSS) и методы сетевого анализа (Parsakhoo et al., 2017); алгоритмы оптимизации колоний муравьев (ACO) (Chung, Contreras, 2011; Lin et al., 2014; Lin et al., 2016; Lin et al., 2017); алгоритм пчелиной колонии (artificial bee colony optimization, ABC) (Jamhuri et al., 2020; Jamhuri et al., 2021; Jamaluddin et al., 2023); алгебраическое моделирование (Peyroy et al., 2021); оптимизация генерации столбцов (Palmgren et al., 2003; Palmgren et al., 2004; Rey et al., 2009; Rix et al., 2015); подход линейного программирования – транспортный симплексный алгоритм (Devlin, Talbot, 2014; Lotfalian et al., 2022); модель целочисленного программирования в сочетании с генерацией столбцов (Bordon et al., 2021); модель смешанного целочисленного программирования MIP + ГИС (Najafi, Richards, 2013); модель смешанно-целочисленного линейного программирования MILP (Aydinel et al., 2008; Van Dyken et al., 2010; Moad et al., 2016; Bordon, 2018; Balaman, 2018); модель смешанного целочисленного нелинейного программирования (Shabani, Sovlati, 2013); метод нечетких е-ограничений (Balaman et al., 2018); модель линейного программирования (Acuna, 2017; Boukherroub et al., 2017, Flisberg et al., 2015; Frisk et al., 2010; Forsberg et al., 2005); алгоритм имитации отжига (Han, Mirphy, 2012); геоинформа-ционные системы (Dean, 2011; Danilovic et al., 2013; Olsson et al., 2017; Duka, et al. 2020); машинное обучение (Almeida et al., 2022).
Российские исследователи также применяют инструменты моделирования при решении проблем научного обеспечения развития лесозаготовительной промышленности. В статье (Антонова, 2011) представлена математическая модель оптимального транспортного освоения арендуемых лесных участков с учетом сроков примыкания и возможностью минимизировать затраты на лесозаготовку и строительство лесовозных дорог; ее реализация методом динамического программирования позволит увеличить объемы освоения лесосечного фонда и повысить рентабельность работы предприятия. В работе (Антонова и др., 2015) на основе системного подхода, математико-картографического моделирования, геоанализа и вычислительного машинного эксперимента средствами ГИС разработаны методика, математическая модель, алгоритм и программный комплекс PTOL на базе ГИС MapInfo для решения задачи размещения лесосек и транспортного освоения лесов. В статье (Гончарова, 2018) разработана схема лесовозных дорог с использованием теории графов. В публикации (Бжеленко и др., 2021) путем разработки оптимизационной модели в среде MS Excel с помощью подсистемы «Поиск решения» и ГИС-проекта транспортной инфраструктуры СЗФО методами геоанализа был выполнен расчет оптимальных параметров ширины грузосборочных зон лесных дорог и требуемой их протяженности на единицу площади для условий СЗФО. В исследовании (Мотовилов и др., 2023) предложены математическая модель для определения оптимального расположения пеллетных производств в регионе и алгоритм ее реализации, основанные на теории методов оптимальных решений.
В последние годы для решения логистических задач в лесной отрасли все более активно применяются имитационные модели. Они обеспечивают преимущества для управленческого планирования в случае непредвиденных обстоятельств в нестационарных системах в условиях неопределенности по сравнению с ментальными, концептуальными, физическими или математическими моделями. Такие методы имитационного моделирования, как дискретно-событийное моделирование (DES), агентно-ориентированное моделирование (ABS) и системная динамика (SD), являются общими основами для отображения реальной системы (Borshchev, 2014).
Помимо дискретно-событийного моделирования, в последние годы в исследованиях лесного комплекса стало использоваться агентно-ориентированное моделирование (АОМ), широко применяемое для решения различных задач моделирования производства логистики в территориально-распределенных производственных системах в различных отраслях промышленности, например электроэнергетике (Divenyi, Dan, 2013), нефтяной промышленности (Sinha et al., 2011), металлургии (Azar et al., 2021), агропромышленном производстве (Naghavi et al., 2020) и т. д. Вместо определения поведения глобальной системы модель АОМ определяет поведение субъектов, которые существуют вместе в окружающей среде и общаются друг с другом и со своей средой. Факторы, влияющие друг на друга на совокупном уровне, знать не обязательно, но если известно поведение отдельных участников, то АОМ может моделировать глобальное поведение (Borshchev, Filippov, 2004). В этом заключается преимущество АОМ по сравнению с другими методами моделирования, такими как системная динамика (SD) или DES, которые имеют ограничения в этом отношении. В частности, в лесном секторе часто существуют разные люди и объекты, такие как операторы, операционные менеджеры, машины и т. д., которые взаимодействуют друг с другом и окружающей средой.
В работе (Karttunen et al., 2013) осуществлено имитационное моделирование экономически эффективной интермодальной контейнерной цепочки поставок лесной щепы посредством сочетания агентно-ориентированного и дискретно-событийного моделирования.
В исследовании (Holzfeind et al., 2021) агентноориентированный подход использовался для анализа и моделирования системы лесозаготовительных и транспортных операций в лесном секторе в горных условиях с ограниченным пространством. Совокупность агентов, помещенных в среду пространственной модели и выступающих в качестве агентов верхнего уровня, составили канатные трелевочные установки, грузовики и отдельные сортировочные линии. Было оценено влияние на поведение системы и ее производительность таких параметров, как погодные условия, вместимость складских мощностей, количество задействованных грузовиков и сроки их заказов. Функциональность модели оценивалась с использованием предполагаемых данных по лесозаготовке, основанных на предположениях, личных знаниях, общей информации и данных из опубликованной литературы. Модель может быть применена для поддержки оперативного планирования лесозаготовок на канатной трелевочной установке и транспортировки заготовленной древесины на промышленные предприятия.
В работе (Helo, Rouzafzoon, 2023) выполнено моделирование с целью минимизации транспортных затрат при сборе бревен из нескольких регионов и доставке их в ближайший пункт сбора. Дана агентно-ориентированная модель, всесторонне охватывающая ключевые элементы цепочки поставок древесины и представляющая подразделения как взаимодействующие автономные агенты. Моделирование сочетает в себе такие компоненты, как маршрутизация географических информационных систем (ГИС), потенциальное местоположение объектов, места сбора бревен, размер автопарка, расстояние перевозки леса грузовиками и поездами. Результаты моделирования представлены в виде диаграмм временных рядов, таких как количество используемых грузовиков, инвентарь объектов и расстояние поездки. Кроме того, применены различные сценарии моделирования для исследования потенциальных местоположений объектов и количества грузовиков, а также определения оптимального местоположения объекта и размера автопарка.
Результаты анализа моделей, методов и алгоритмов построения лесозаготовительных си- стем позволяют утверждать, что в настоящее время агент-ориентированное моделирование, несмотря на все существующие сложности по его использованию, является наиболее перспективным и наиболее адекватным подходом для решения задачи снижения общих эксплуатационных затрат на заготовку древесины. В определенной степени для моделирования подобных систем могут использоваться эволюционные алгоритмы и дискретно-событийное моделирование. Но их возможности ограничены описанием достаточно примитивного поведения элементов системы, которое определяется на общемодельном уровне. Территориальные системы лесозаготовительного производства относятся к системам, в которых элементам присуще собственное поведение, связанное со складывающимися для них ситуационными факторами в определенные моменты времени. И именно агент-ориентированное моделирование допускает использование разнообразных механизмов реализации поведения как на уровне моделей поведения отдельных агентов, так и на общемодельном уровне. Но ключевой проблемой является отсутствие методологической основы построения агент-ориентированных моделей. При этом говорить о возможности создания единой методологии на текущий момент нельзя, так как перечень решаемых здесь задач является существенным и зачастую необозримым. Особенную сложность вызывают вопросы адекватного представления поведения агента, методов адаптации, вывода в условиях неопределённости. Поэтому агентное моделирование будет развиваться вместе с развитием других направлений математики и информатики. Однако имеется возможность сузить спектр решаемых вопросов за счет концентрации внимания на отдельных предметных областях. В связи с этим основной целью представленного исследования является развитие методологии агент-ориентированного моделирования, направленной на разработку моделей территориальной системы лесозаготовки. Научная новизна и значимость исследования заключаются в создании специализированных подходов к разработке моделей лесозаготовительных систем, в которых проработаны вопросы создания пространственной сети, возможностей ее интеграции с геоинформационными системами, обеспечения возможности адаптации к сервис-ориентированному подходу при формировании элементов, обеспечение возможности формирования поведения агентов в части использования пространственных элементов модели. В результате обеспечивается последовательный и полный цикл этапов, начиная с анализа предметной области и заканчивая практической реализацией и использованием моделей.
Методы
Существующие методики разработки АОМ исследованы в работах (Алфимцев и др., 2013; Аксенов и др., 2016; Зубарева и др., 2016). Наиболее подробно они описаны А.Н. Швецовым, разделившим существующие методологии на четыре класса: базирующиеся на объектноориентированных методах и технологиях с использованием соответствующих расширений (Agent UML, P2P Agent Platform, ADELFE, INGENIAS, O-MASE); использующие традиционные методы инженерии знаний (MAS CommonKADS); основанные на организационно-ориентированных представлениях (Gaia, ПВ-сети, М-архитектура, SODA, ANEMONA, ASPECS, GORMAS, ROMAS); комбинирующие в различной степени методы трех первых классов (Tropos, PASSI, Prometeus) (Швецов, 2016).
Каждая из обозначенных выше методологий предлагает свой набор базовых элементов и инструкций, а в некоторых случаях и программное инструментальное средство для создания агентных систем. Все это разнообразие подходов, в свою очередь, приводит к необходимости объединения и обобщения методологий проектирования в рамках проектов по реализации моделей. На практике конкретная реализация многоагентной системы может рассматриваться как программа, обладающая специфичным поведением и функционирующая в гетерогенной среде (Николайчук и др., 2019). В связи с этим особое значение приобретает общая концепция, лежащая в основе формирования агентных систем, позволяющая иметь единый взгляд на формирование ролевой модели. Здесь отмечаем два подхода, развиваемых российскими исследователями: концепция сетей потребностей и возможностей (ПВ-сетей) и метаметодология проектирования мультиагентных интеллектуальных систем (МАИС).
Согласно концепции ПВ-сетей, каждой заявке, заказу и другим потребностям и возможностям (производственные ресурсы, станки, оборудование, транспортные средства, персонал) присваиваются программные агенты, которые договариваются с другими агентами и планируют выполнение заказов «точно в срок» или «как можно раньше», что позволяет обеспечить поддержку коллективного согласования и принятия решений в реальном времени на различных этапах планирования и исполнения производственного плана в различных подразделениях, работающих совместно над решением общих задач. Постоянный поиск соответствий между конкурирующими и кооперирующими агентами потребностей и возможностей на виртуальном рынке системы позволяет строить решение любой сложной задачи как динамическую сеть связей, гибко изменяемую в реальном времени (Skobelev, 2015).
Метаметодология проектирования МАИС (Швецов, 2016) основана на отражении выбранного подпространства реального или виртуального мира во всей возможной полноте его эмпирически проявленных и не проявленных свойств. Для этого используется понятие модельного пространства мира (МПМ) как высокоуровневого гносеологического концепта, охватывающего ту часть реальности, которая моделируется МАИС, и компоненты внешней среды, которые существуют в онтологическом единстве с МАИС. Особенностью метаметодологии является включение в область изменчивой действительности как реальных, так и виртуальных миров, которые уже являются информационными представлениями других миров (возможно, также виртуальных). Таким образом, возникает многоуровневое вложенное представление о мире, в котором существуют и действуют физические и информационные сущности. Такой подход дает возможность рассматривать анализ, моделирование и проектирование собственно МАИС как единый многоуровневый итерационный процесс, позволяющий получить модели МПМ с различной степенью детализации действительности.
Касаясь вопросов методологии проектирования агент-ориентированных моделей, нельзя не отметить имеющиеся спецификации описа- ния данного вида моделей. Наиболее часто используются спецификация DREAM (descriptive agent-based modeling) и Протокол ODD (Overview, Design concepts and Details).
В соответствии со спецификацией DREAM на начальном этапе осуществляется создание комплексной сетевой модели, которая в графическом виде отображает основные элементы модели. Комплексная сетевая модель может быть преобразована в модель спецификации, содержащую набор конструкций спецификации, отражающих прямое однозначное соответствие ее с конструкциями агент-ориентирован-ной модели. В соответствии со спецификацией создается агент-ориентированная модель. Таким образом, в итоге формируется конструкция согласованных элементов спецификации DREAM. От комплексной сетевой модели можно перейти к спецификациям, а от них – к агент-ориентированной модели. Возможен и обратный переход (Niazi, 2011).
Ключевая идея, лежащая в основе разработки протокола ODD, состоит в создании общего формата и стандартной структуры, с помощью которых можно было бы задокументировать все элементы модели. Это обеспечивает простоту и полноту описания моделей, повышает эффективность их создания и восприятия. Тем самым упрощается процесс воспроизведения модели, следовательно, появляется возможность более осознанно говорить о ее адекватности (Grimm et al., 2020).
Спецификации нельзя позиционировать в качестве методологий (они для этого и не предназначены). Но, безусловно, они могут быть вписаны как компоненты методологий, в особенности на этапах анализа и валидации.
Результаты и обсуждение
Авторами осуществляется развитие собственной концепции создания агент-ориенти-рованных моделей. Её идеологической основой является метаметодология построения МАИС, а ролевая и функциональная модели базируются на объект-ориентированном подходе и концепции ПВ-сетей. В нашей интерпретации это сервис-ориентированный подход (Гулин и др., 2023). Концепция определяет основные правила создания разрабатываемой агент-ори-ентированной системы управления лесным комплексом: определение целевых показате- лей и критериев оценки эффективности функционирования системы в условиях существования мобильных элементов; формирование пространственного графа функционирования системы с учетом существующей инфраструктуры, способного отображать мобильность элементов системы; определение состава и параметров объектов системы в соответствии с сервис-ориентированной парадигмой; определение моделей поведения объектов системы с учетом их мобильности и направленности на предоставление/потребление сервисов; распределение объектов системы в узлах пространственного графа; обеспечение возможности манипулировать параметрами и структурой пространственного графа, структурой и параметрами объектов, первичным распределением объектов в узлах пространственного графа; обеспечение возможности интерактивного получения результатов; интегрированность моделей с информационными системами, содержащими информацию о реальных процессах в системе.
Концепция лежит в основе методологии разработки агент-ориентированных моделей, отдельные аспекты которой представлены в статье (Швецов, Дианов, 2019). Концепция была использована при создании концепта модели лесозаготовок на территории Бабушкинского муниципального округа Вологодской области (далее – концепт модели).
Процесс формирования модельного пространства обеспечивается использованием контекстной диаграммы. На контекстной диаграмме в наглядном виде изображаются внешние объекты и их взаимодействия с системой. Здесь четко и понятно показаны необходимые внешние интерфейсы с кратким пояснением, что передается внутрь и наружу. Таким образом, мы имеем наглядное представление о входах и выходах системы. При этом для рассматриваемого вида пространственно-распределенных систем предложено выделить отдельно два контура взаимодействия между внешними объектами и системой: контур управления целевыми установками на внутрисистемном уровне и контур управления правилами организации функционирования системы. Эти два контура взаимодействуют с системой через внешние объекты-посредники. Воздействуя на систе- му постоянно, они формируют ее поведение. В отличие от взаимодействий, осуществляемых непосредственно между внешними объектами и системой, типы взаимодействия этих контуров являются опосредованными, т. е. осуществляемыми через посредников. В данном случае в качестве посредников выступают внешние объекты, которые имеют как взаимодействие с другими внешними объектами, так и взаимодействия с системой. Контекстная диаграмма региональной лесозаготовительной системы представлена на рисунке 1.
С использованием контекстной диаграммы и сформированного концептуального пространства формируются часть набора исходных данных для моделирования, управляемые параметры модели и показатели моделирования. Так, исходя из представленной на рисунке 1 контекстной диаграммы можно определить следующие параметры:
– исходные данные для моделирования: цены на перевозку лесозаготовительной техники, цены на автомобильное топливо, цены на продукцию лесозаготовительной отрасли;
– управляемые параметры: целевые показатели, новые элементы дорожной сети, финансирование содержания дорожной сети, размещение объектов системы лесозаготовки, параметры изъятия лесов на участке;
– показатели моделирования: значения целевых показателей, размер оплаты услуг по перевозке лесозаготовительной техники, размер оплаты заправки техники топливом, объем поставленной продукции системой лесозаготовки.
Контекстная диаграмма также позволяет четко определить параметры работы с моделью системы, которые являются отправной точкой для формирования ее концептуального пространства.
Рис. 1. Контекстная диаграмма региональной лесозаготовительной системы
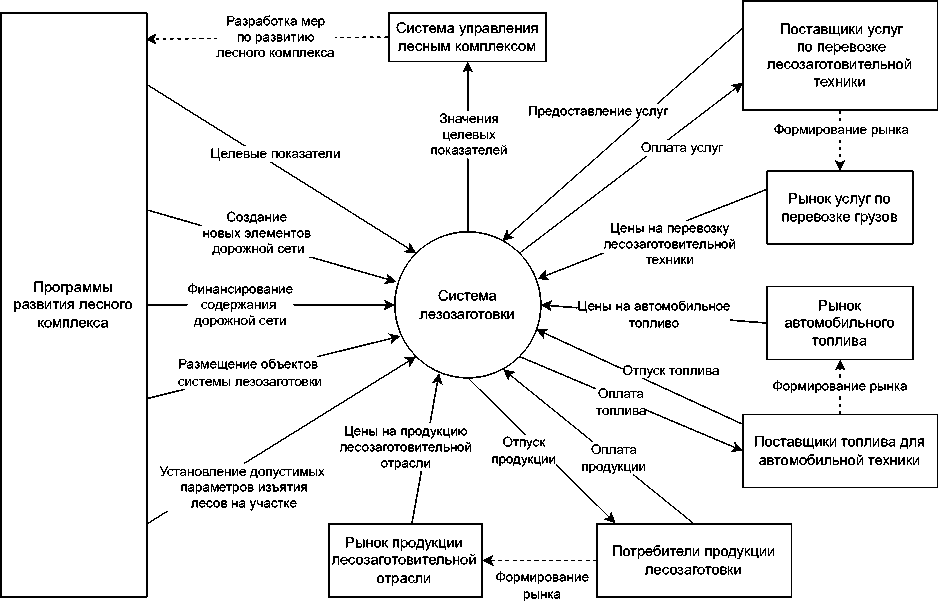
Источник: составлено авторами.
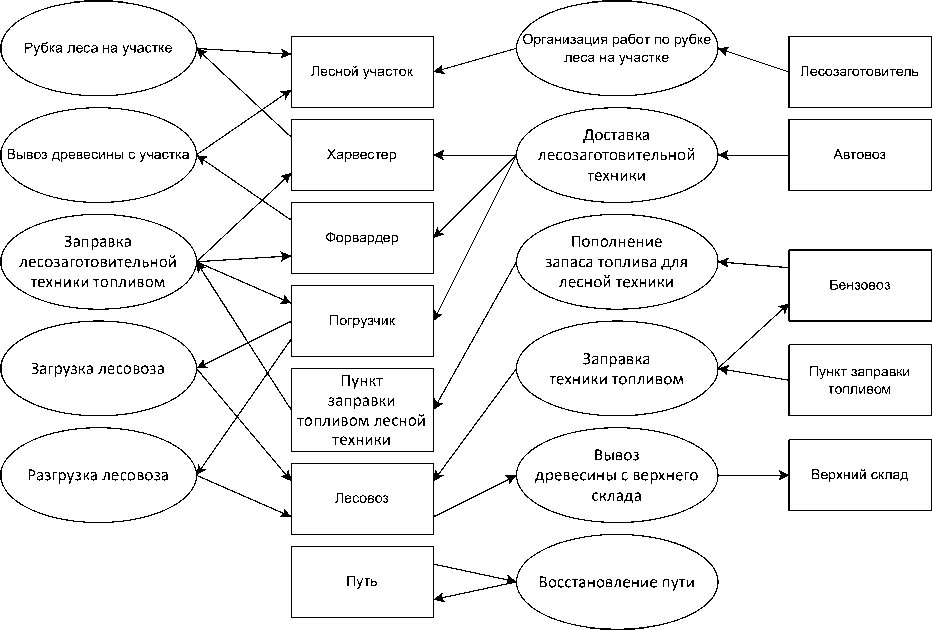
На первом шаге формирования концептуальной структуры модели определяются объекты, содержащие атрибуты, непосредственно формирующие ее исследуемые показатели. Далее для всех пар «объект – атрибут» каждого идентифицированного на первом шаге объекта определяется перечень процессов, с которыми связано изменение значений соответствующих атрибутов. Для всех процессов определяются субъекты реализации, которые, по своей сути, представляют собой следующий набор идентифицированных объектов модели. На следующем шаге для каждой связки «субъект – процесс» определяются три блока атрибутов: целеустанавливающие, инициализирующие и формирующие. Целеустанавливающие атрибуты формируют мотивационную составляющую запуска процесса. Инициализирующие атрибуты участвуют в описании ситуации, при которой становится возможным запуск процесса. Формирующие атрибуты определяют степень воздействия процесса на изменяемый атрибут. Процесс идентификации составляющих концептуальной структуры модели завершается на шаге, при котором не появляется новых связок «объект – атрибут». Далее оформляется структура объектов модели. В таблице 1 представлена структура объекта Харвестер.
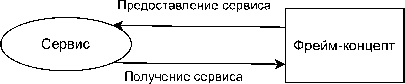
Дальнейший этап по формализации модели связан с формированием структуры сервисов во взаимосвязи с объектами модели. Идентифицированные в концептуальной структуре модели процессы позиционируются в качестве сервисов. Каждый сервис имеет две стороны отношений с объектами: предоставляющие сервис и потребляющие сервис. Эти отношения отображаются с использованием ОС-проекции (рис. 2).
С каждым отношением «Получение сервиса» связываются модули мотивации. Данные модули имеют единственный выходной параметр со значениями «мотивирован» либо «не мотивирован». Например, для отношения между объектом «Харвестер» и сервисом «Заправка лесозаготовительной техники топливом» определен модуль мотивации «востребован». Логика его содержимого заключается в том, что если у объекта «Харвестер» имеется владелец (заполнен целеустанавливающий атрибут «Принадлежность»), то выходной параметр модуля мотивирования имеет значение «мотивирован».
Для реализации сервисов в их структуре на уровне связанных с сервисом объектов формируются модули идентификации, планирования и реализации сервиса. Между модулями могут устанавливаться связи, обеспечивающие пере-
Таблица 1. Структура объекта Харвестер
|
Харвестер |
H(N_h) |
||
|
Атрибут |
Диапазон значений |
Единицы измерения |
Обозначение |
|
Идентификатор |
Буквенно-числовое обозначение |
H_id |
|
|
Место постоянной дислокации |
Идентификатор элемента Узел |
H_loc |
|
|
Место текущей дислокации |
Идентификатор элемента Узел |
H_cloc |
|
|
Место работы |
Идентификатор элемента Узел |
H_rloc |
|
|
Принадлежность |
Идентификатор элемента Лесозаготовитель |
H_vlad |
|
|
Масса |
Числовое значение |
кг |
H_mass |
|
Производительность |
Числовое значение |
куб. м / час |
H_eff |
|
Объем топливного бака |
Числовое значение |
литр |
H_vbak |
|
Текущий уровень топлива |
Числовое значение |
литр |
H_cbak |
|
Средний расход топлива |
Числовое значение |
л / час |
H_rt |
|
Стоимость обслуживания в фазе эксплуатации |
Числовое значение |
руб. / час |
H_stobe |
|
Стоимость обслуживания в фазе простоя |
Числовое значение |
руб. / час |
H_stobp |
|
Скорость перемещения |
Числовое значение |
км / час |
H_spped |
|
Время эксплуатации |
Числовое значение |
час |
H_te |
|
Источник: составлено авторами. |
|||
Рис. 2. ОС-проекция модели
Обозначения:
Источник: составлено авторами.
дачу параметров. На входе они имеют определенное множество значений атрибутов объектов модели. Для каждого модуля приводится описание алгоритмов его реализации.
Модуль идентификации оперирует текущими значениями выходного параметра модуля мотивации и инициирующего параметра «Текущий уровень топлива» объекта «Харвестер». Если первый имеет значение «мотивирован», а второй имеет значение ниже определенной величины, то модуль идентификации запускается.
Пример описания модулей представлен на рисунке 3.
ОС-проекция и проекция модулей сервисов далее реализуются в средах агент-ориентиро-ванного моделирования.
На следующем этапе формируется пространственная структура элементов модели. Здесь определяется набор узлов размещения объектов модели, задается система координат и в соответствии с ней определяется размещение узлов и сети взаимодействия между узлами. Далее происходит размещение выявленных объектов модели в узлах.
Качественное представление транспортных сетей в моделях имеет важное значение. Они, с одной стороны, должны отображать существующую дорожную сеть, с другой стороны, должны предоставлять возможность формировать сеть предполагаемых к построению лесных дорог. Кроме того, следует обеспечить связь параметров объектов дорожных сетей с элементами
Рис. 3. Проекция модулей сервиса «Заправка лесозаготовительной техники топливом»
Пункт заправки топливом лесной техники
Заправка лесозаготовительной техники топливом
Харвестер
Местоположение; Принадлежность

Объм топлива; скорость заправки
Объем топлива
Реализация
Путь
Начало;
Окончание; Длина

Текущий уровень топлива;
Время эксплуатации Место текущей дислокации;
Принадлежность
Текущий уровень топлива
Инициализация
Текущий уровень Объем бака;
топлива Текущий уровень топлива
Длина;
Качество дорожного покрытия;
Износостойкость

Качество дорожного покрытия
"прибыл для заправки";
Идентификатор Харвестера
"заправлен"

Реализация
Скорость перемещения; Средний расход топлива; Масса;
Место работы; Идентификатор Харвестера
Планирование
"необходима заправка"
Маршрут
-
1. После получения сообщения "прибыл для заправки" определяется необходимый объем заправки для Харвестера с переданным в сообщении идентификатором и сравнивает его с объемом имеющегося топлива.
-
2. При наличии необходимого объема, со скоростью заправки изменяется объем топлива пункта заправки и текущий уровень топлива Харвестера. При достижении текущим уровнем топлива значения, равного объему бака Харвестера, процесс изменения параметров прекращается. Готовится сообщение "заправлен" в адрес модуля реализации Харвестера.
-
3. При отсутствии необходимого объема запускается таймер.
По истечении времени таймера происходит возврат к пункту 1.


-
1. Заканчивает рубку леса.
-
2. Определяется скорость перемещения по каждому из путей маршрута.
-
3. Осуществляется перемещение Харвестера по маршруту.
-
4. После прохождения пути изменяется качество его дорожного покрытия.
-
5. При перемещении изменяется текущий уровень топлива и время эксплуатации Харвестера.
-
6. После перемещения по маршруту готовится сообщение в адрес модуля реализации Пункта заправки топливом лесной техники "прибыл для заправки" и Идентификатором Харвестера.
-
7. После получения сообщения "заправлен" определяется маршрут до места работы.
-
8. Определяется скорость перемещения по каждому из путей маршрута.
-
9. Осуществляется перемещение Харвестера по маршруту.
-
10. После прохождения пути изменяется качество его дорожного покрытия.
-
11. При перемещении изменяется текущий уровень топлива и время эксплуатации Харвестера.
-
12. Возобновляется рубка леса.
-
1. Определяются пункты заправки лесозаготовительной техники, принадлежащие владельцу
-
2. Определяется маршрут.
-
3. Готовится сообщение в адрес модуля реализации с маршрутом перемещения.
Харвестера и выбирается ближайший.

При снижении уровня топлива ниже определенной величины готовится сообщение "необходима заправка" в адрес модуля планирования
Источник: составлено авторами.
агент-ориентированных моделей. При этом необходимо, отталкиваясь от существующих в системах агент-ориентированного моделирования механизмов реализации пространственных сетей, сформулировать и реализовать механизмы имитации функционирования сети дорог, используемых в процессах лесохозяйственной деятельности.
Многие из существующих агент-ориентиро-ванных сред (например, программные среды AnyLogic, NetLogo, GAMA) обеспечивают возможность формирования пространственных сетей за счет интеграции с геоинформационными системами (ГИС). Таким образом, в агент-ориентированных моделях можно использовать информацию о существующей дорожной сети, которую содержат геоинформационные системы. При этом модели представляются более реалистичными и наглядными. Интеграция обеспечивается за счет сервисов, предоставляемых современными Web-ГИС. К ним относятся тайловые сервисы и сервисы предоставления шейп-файлов. Помимо внешнего вида, из географических данных агенты получают точные размеры моделируемых объектов, что позволяет разрабатывать более адекватные модели. В разработанной нами концепции дорожная сеть разбивается на отдельные участки – пути. С каждым путем ассоциируется отдельный агент, который содержит характеристики пути.
Полученная дорожная сеть для лесозаготовок на территории Бабушкинского муниципального округа Вологодской области представлена на рисунке 4. В качестве источника картографических данных использовался портал OSM (OpenStreetMap), где можно получить отдельные шейп-файлы автомобильных дорог, лесных дорог и лесных кварталов. Необходимые для модели карты были созданы при помощи инструментария ГИС QGIS, позволяющего загружать, редактировать и просматривать географические данные. Для поиска и отбора необходимых данных использовался плагин QGIS QuickOSM.
Дорожную сеть, полученную из ГИС, можно дополнять с использованием имеющихся в агент-ориентированных средах специализированных элементов. К ним, как правило, относятся элементы, позволяющие создавать точечные и полигональные объекты, а также соединять их.
В соответствии с разработанной концепцией создания агент-ориентированных моделей определена схема принятия управленческих решений. Она использует результаты, зафиксированные в процессах взаимодействия объектов модели при оказании услуг. Взаимодействие осуществляется в конфигурации территори-
Рис. 4. Дорожная сеть для лесозаготовок на территории Бабушкинского муниципального округа Вологодской области
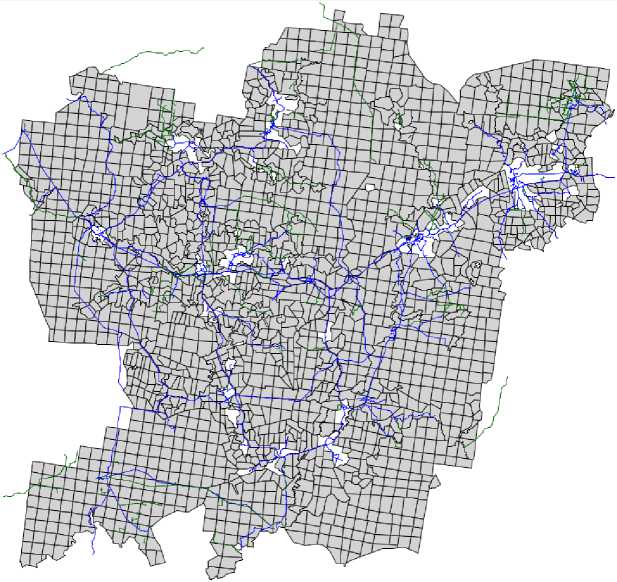
Источник: составлено авторами.
альной транспортной сети, которая определяет характеристики взаимодействия. В процессе оказания услуг формируются значения заданного набора параметров в рамках оценки успешности функционирования модели – целевых показателей. Основная цель моделирования заключается в нахождении при имеющихся ресурсах (ограничениях) наиболее оптимальной архитектуры функционирования моделируемой системы (структуры транспортной сети, количества, характеристик и мест постоянной дислокации объектов) исходя из значений целевых показателей. В процессе моделирования формируются различные архитектурные композиции моделируемой системы. Количество возможных вариантов ограничивается спецификой предметной области и имеющимися ограничениями ресурсов. Производится моделирование по каждому из вариантов в течение определенного времени моделирования. По результатам рассчитываются значения показателей эффективности модели, которые являются производными от значений параметров объектов модели, фиксируемых в ходе моделирования. Набор полученных показателей для каждой модели сравнивается с набором целевых показателей. По результатам определяется наиболее оптимальный вариант архитектуры моделируемой системы.
Заключение
В результате исследования разработан алгоритм конкретных шагов и стадий, необходимый для проектирования и реализации агент-ориен-тированных моделей, обеспечивающих поддержку принятия решений по формированию эффективной инфраструктуры для использования лесных ресурсов. Он базируется на сервис-ориентированном подходе к проектированию агент-ориентированных моделей и включает последовательный и полный цикл этапов, начиная с анализа предметной области и заканчивая практической реализацией и эксплуатацией моделей. Его отличительной особенностью является использование на этапе концептуального проектирования разработанных схем функционирования моделируемой агент-ориентированной системы и ее объектов. На первой стадии осуществляется разработка вербальной модели: формальное описание моделируемой системы, определяются цели моделирования, целевые показатели и критерии оценки модели. На стадии концептуального проектирования среды функционирования объектов определяются элементы пространственного графа (узлы и пути) и их атрибуты. Данный процесс, с одной стороны, осуществляется с учетом среды реальной предметной области, с другой стороны, может содержать элементы ее предполагаемого развития.
Затем следует стадия концептуального проектирования объектов модели. На основе анализа вербальной модели в соответствии с сервис-ориентированным подходом идентифицируются объекты модели. В результате получается набор объектов с закрепленными за ними потребностями и сервисами, параметрами мобильности, атрибутами и структурой модулей моделей проведения. На стадии формализации модели прорабатывается содержание модулей моделей поведения объектов. В ходе реализации шагов данной стадии происходит уточнение концептуальной модели среды функционирования объектов и концептуальной модели объектов. Следующая стадия – формирование архитектуры агент-ориентированной модели. На основе анализа результатов, полученных на стадиях концептуализации и формализации, определяются состав и структура агентов модели. Здесь же определяются наборы управляемых параметров и параметров оценки результатов моделирования, а также механизмы формирования параметров оценки результатов моделирования.
Далее следует стадия реализации модели, осуществляемая с использованием программного инструментария. Формируется первоначальный набор элементов модели, задаются их начальные параметры и пространственное размещение. На стадии эксплуатации модели проводятся экспериментальные исследования, связанные с изменением управляемых параметров. Для отдельных целей моделирования системы (при необходимости оценки ее различных конфигураций) может быть определена стадия реконфигурации модели. Здесь возможны два варианта: во-первых, повторение стадий реализации (формирование новой конфигурации первоначального набора элементов модели, их начальных параметров и пространственного размещения) и экспериментальных исследований; во-вторых, повторение ста- дии концептуального проектирования среды функционирования объектов (реконфигурация среды функционирования агентов) с последующим повторением стадий реализации и экспериментальных исследований. Заключительная стадия связана с оценкой полученных результатов.
Алгоритм конкретных шагов и стадий, необходимых для проектирования и реализации агент-ориентированных моделей, был апробирован в рамках создания концепта агент-ориентированной модели инфраструктуры лесозаготовки на территории Бабушкинского муниципального округа Вологодской области.
Список литературы Методология агентного моделирования развития территориальных систем лесозаготовительного производства
- Аксенов К.А., Спицина И.А., Крохин А.Л. (2016). Сравнительный анализ методов разработки информационных систем на основе мультиагентного подхода // Компьютерный анализ изображений: Интеллектуальные решения в промышленных сетях (CAI-2016): сборник научных трудов. Екатеринбург: Учебно-методический центр Уральского политехнического института. С. 205—207.
- Алфимцев А.Н., Локтев Д.А., Локтев А.А. (2013). Сравнение методологий разработки систем интеллектуального взаимодействия // Вестник Московского государственного строительного университета. № 5. С. 200-208.
- Антонова Т.С. (2011). Рациональное размещение лесовозных автомобильных дорог при разработке проектов освоения лесов для заготовки древесины // Известия Санкт-Петербургской лесотехнической академии. № 197. С. 130-138.
- Антонова Т.С., Тюрин Н.А., Громская Л.Я. (2015). Методика размещения лесосек и транспортного освоения лесов лесозаготовительного предприятия на базе геоинформационных систем // Технология колесных и гусеничных машин. № 2 (18). С. 12-18.
- Бжеленко П.В., Антонова Т.С., Тюрин Н.А. (2021). Количественная оценка объемов лесного дорожного строительства для полного транспортного освоения лесов в Северо-Западном федеральном округе // Цифровые технологии в лесном секторе: материалы II Всероссийской научно-технической конференции-вебинара. Санкт-Петербург. СПб.: Санкт-Петербургский государственный лесотехнический университет имени С.М. Кирова. С. 32-34.
- Гончарова М.В. (2018). Разработка схемы лесовозных дорог с использованием теории графов // Молодые ученые в решении актуальных проблем науки: материалы Всероссийской науч.-практ. конф. студентов, аспирантов и молодых ученых. Красноярск. С. 30-32.
- Гулин К.А., Дианов С.В., Алферьев Д.А., Дианов Д.С. (2023). Проблемы агент-ориентированного моделирования формирования эффективной территориальной сети лесных дорог // Экономические и социальные перемены: факты, тенденции, прогноз. Т. 16. № 1. С. 68-84. DOI: 10.15838/esc.2023.1.85.4
- Зубарева М.Г., Цветков А.А., Хамуш А.Л. [и др.] (2016). Методологии проектирования мультиагентных систем // Технические науки в России и за рубежом. М.: Буки-Веди. С. 3-8.
- Ларин С.М., Громская Л.Я., Тюрин Н.А. (2022). Особенности транспортного обеспечения интенсивной модели лесного хозяйства // Сборник статей по материалам научно-технической конференции Института технологических машин и транспорта леса по итогам научно-исследовательских работ 2022 года. СПб.: Санкт-Петербургский государственный лесотехнический университет имени С.М. Кирова. С. 51-55.
- Мотовилов Г.К., Антонова Т.С., Тюрин Н.А. (2023). Обоснования региональной инфраструктуры пеллет-ного производства методом гравитационной модели // Сборник статей по материалам научно-технической конференции Института технологических машин и транспорта леса по итогам научно-исследовательских работ 2022 года. СПб.: Санкт-Петербургский государственный лесотехнический университет имени С.М. Кирова. С. 12-16.
- Николайчук О.А., Павлов А.И., Столбов А.Б. (2019). Методическое и программное обеспечение процесса гибкой разработки агентных имитационных моделей // Девятая всероссийская научно-практическая конференция по имитационному моделированию и его применению в науке и промышленности, Екатеринбург, 16-18 октября 2019 года. Екатеринбург: Издательство Уральского государственного педагогического университета. С. 215-222.
- Орлов А.М., Ковалев А.П., Громыко О.С., Грищенова Ю.А. (2022). О проблемах и перспективах заготовки древесины в лесах Дальнего Востока // Природообустройство. № 2. С. 108-115. DOI: 10.26897/19976011-2022-2-108-115
- Прядилина Н.К., Петров А.П. (2020). Использование практики разработки схем транспортного освоения лесов в региональных программах развития лесного сектора // Вестник Алтайской академии экономики и права. № 5. С. 152—158.
- Русецкая Г.Д. (2022). Реализация концепции устойчивого развития в управлении лесным хозяйством // Известия Байкальского государственного университета. Т. 32. № 3. С. 512—526. DOI: 10.17150/2500-2759.2022.32(3).512- 526
- Русецкая Г.Д., Санина Л.В. (2023). Переход к освоению интенсивной модели использования и воспроизводства лесов // Baikal Research Journal. Т. 14. № 1. C. 91-104. DOI: 10.17150/2411-6262.2023.14(1).91-104
- Швецов А.Н. (2016). Агентно-ориентированные системы: методологии проектирования. Вологда: Вологодский государственный университет. 192 с.
- Швецов А.Н., Дианов С.В. (2019). Методика разработки агент-ориентированных моделей сложных систем // Вестник Череповецкого государственного университета. № 1(88). С. 48-58. DOI: 10.23859/1994-06372019-1-88-5
- Acuna M. (2017). Timber and biomass transport optimization: A review of planning issues, solution techniques and decision support tools. Croatian Journal of Forest Engineering, 38(2), 279-290.
- Akhtari S., Taraneh S., Siller-Benitez D.G., Roeser D. (2019). Impact of inventory management on demand fulfilment, cost and emission of forest-based biomass supply chains using simulation modelling. Biosystems Engineering, 178, 184-199. DOI: https://doi.org/10.1016/j.biosystemseng.2018.11.015
- Almeida R.O., Munis R.A., Camargo D.A. et al. (2022). Prediction of road transport of wood in Uruguay: Approach with machine learning. Forests, 13(10), 1737. DOI: 10.3390/f13101737
- Asikainen A. (2001). Simulation of logging and barge transport of wood from forests on islands. International Journal of Forest Engineering, 12(2), 43-50. DOI: 10.1080/14942119.2001.10702445
- Audy J.-F., Ronnqvist M., D'Amours S., Yahiaoui A.-E. (2022). Planning methods and decision support systems in vehicle routing problems for timber transportation: A review. International Journal of Forest Engineering, 34(5), 1-25. DOI: 10.1080/14942119.2022.2142367
- Aydinel M., Sowlati T., Cerda X., Cope E., Gerschman M. (2008). Optimization of production allocation and transportation of customer orders for a leading forest products company. Mathematical and Computer Modelling, 48(7-8), 1158-1169. DOI: 10.1016/j.mcm.2007.12.025
- Azar A., Mashayekhi M., Mojataba A., Hossein S. (2021). Modeling steel supply chain and estimating its consumption through ABM methodology. Industrial management Perspective, 11(41), 33-51. DOI: 10.52547/jimp.11.1.33
- Balaman S.Y., Matopoulos A., Wright D.G., Scott J. (2018). Integrated optimization of sustainable supply chains and transportation networks for multi technology bio-supplier based production: A decision support system supplier based on fuzzy e-constraint method. Journal of Cleaner Production, 172, 2594-2617. DOI: 10.1016/j. jclepro.2017.11.150.
- Beaudoin D., LeBel L., Soussi M.A. (2013). Discrete Event Simulation to Improve Log Yard Operations. CIRRELT Working Paper. Quebec. Available at: https://www.cirrelt.ca/Doc
- Berg S., Bergstrom D., Nordfjell T. (2014). Simulating conventional and integrated stump- and round-wood harvesting systems: a comparison of productivity and costs. International Journal of Forest Engineering, 25(2), 138-155. DOI: 10.1080/14942119.2014.941640
- Bordón M., Montagna J.M., Corsano G. (2018). An exact mathematical formulation for the optimal log transportation. Forest Policy and Economics, 95, 115-122. DOI: 10.1016/j.forpol.2018.07.017
- Bordón M., Montagna J.M., Corsano G. (2021). Solution approaches for solving the log transportation problem. Applied Mathematical Modelling, 98(4), 611-627. DOI: 10.1016/j.apm.2021.06.003
- Borshchev A, Filippov A. (2004). From system dynamics and discrete event to practical agent-based modelling: Reasons, techniques, tools. In: Kennedy M., Winch G.W., Langer R.S., Rowe J.I., Yanne J.M. (Eds). Proceedings of the 22nd International Conference of the System Dynamics Society; July 25—29; Oxford (UK). Littleton (MA): System Dynamics Society.
- Borshchev A. (2014). The Big Book of Simulation Modeling: Multimethod Modeling with AnyLogic. Chicago, IL. Boukherroub T., LeBel L., Lemieux S. (2017). An integrated wood pellet supply chain development: Selecting among feedstock sources and a range of operating scales. Applied Energy, 198, 385-400. DOI: 10.1016/j. apenergy.2016.12.013
- Chung W., Contreras M. (2011). Forest transportation planning under multiple goals using ant colony optimization. In: Ant Colony Optimization Methods and Applications. DOI: 10.5772/13805
- Danilovic M., Stojnic D., Novkovic N., Dragan G.P. (2013). The state of forest roads and determining an optimum density of a forest road network using GIS. Forest Review, 44, 6—10.
- Dean D.J. (2011). Finding optimal routes for networks of harvest access roads using GIS-based techniques. Canadian Journal of Forest Research, 27(1), 11-22. DOI: 10.1139/cjfr-27-1-11
- Devlin G., Talbot B. (2014). Deriving cooperative biomass resource transport supply strategies in meeting co-firing energy regulations: A case for peat and wood fibre in Ireland. Applied Energy, 113, 1700-1709. DOI: 10.1016/ j.apenergy.2013.09.019
- Divenyi D., Dan A. (2013). Agent-based modeling of distributed generation in power system control. IEE Transactions in Sustainable Energy, 4(4), 886-893. DOI: 10.1109/TSTE.2013.2253811/
- Buka A., Bomber Z., Porsinsky T, Papa I., Pentek T. (2020). The influence of increased salvage felling on forwarding distance and the removal — a case study from Croatia. Forests, 12(1), 7. DOI: 10.3390/f12010007
- Flisberg P., Frisk M., Ronnqvist M., Guajardo M. (2015). Potential savings and cost allocations for forest fuel transportation in Sweden: A country-wide study. Energy, 85, 353—365. DOI: 10.1016/j.energy.2015.03.105
- Forsberg M., Frisk M., Ronnqvisty M. (2005). FlowOpt — a decision support tool for strategic and tactical transportation planning in forestry. International Journal of Forest Engineering, 16(2), 101—114. DOI: 10.1080/14942119.2005.10702519
- Frisk M., Gothe-Lundgren M., Jornsten K., Ronnqvist M. (2010). Cost allocation in collaborative forest transportation. European Journal of Operational Research, 205(2), 448—458. DOI: 10.1016/j.ejor.2010.01.015
- Grimm V., Railsback S.F., Vincenot C.E. et al. (2020). The ODD protocol for describing agent-based and other simulation models: A second update to improve clarity, replication, and structural realism. Journal of Artificial Societies and Social Simulation, 23(2), 7. DOI: 10.18564/jasss.4259
- Gronalt M., Rauch P. (2018). Analyzing railroad terminal performance in the timber industry supply chain — a simulation study. International Journal of Forest Engineering, 29(1), 162—170. DOI: 10.1080/14942119. 2018.1488913
- Han S.K., Murphy G.E. (2012). Solving a woody biomass truck scheduling problem for a transport company in Western Oregon, USA. Biomass and bioenergy, 44, 47—55. DOI: 10.1016/j.biombioe.2012.04.015
- Helo P., Rouzafzoon J. (2023). An agent-based simulation and logistics optimization model for managing uncertain demand in forest supply chains. Supply Chain Analytics, 4, 100042. DOI: 10.1016/j.sca.2023.100042
- Holzfeind T., Kanzian C., Gronalt M. (2021). Challenging agent-based simulation for forest operations to optimize the European cable yarding and transport supply chain. International Journal of Forest Engineering, 32(1), 77— 90. DOI: 10.1080/14942119.2021.1850074
- Jamaluddin J., Kamarudin N., Mohd Hasmadi I., Ahmad S.A. (2023). Optimizing timber transportation planning for timber harvesting using bees algorithm in Malaysia. Journal of Environmental Management, 340, 117977. DOI: 10.1016/j.jenvman.2023.117977
- Jamhuri J., Norizah K., Mohd Hasmadi I., Azfanizam A.S. (2021). Bees algorithm for forest transportation planning optimization in Malaysia. Forest Science and Technology, 17(2), 88—99. DOI: 10.1080/21580103.2021.1925597
- Jamhuri J., Norizah K., Mohd Hasmadi I., Siti A.A. (2020). Timber transportation planning using bees algorithm. IOPConference Series: Earth and Environmental Science, 463, 012171. DOI: 10.1088/1755-1315/463/1/012171
- Karttunen K., Lattila L., Korpinen O.-J., Ranta T. (2013). Cost-efficiency of intermodal container supply chain for forest chips. Silva Fennica, 47, 1—24. DOI: 10.14214/sf.1047
- Kogler C., Rauch P. (2018). Discrete event simulation of multimodal and unimodal transportation in the wood supply chain: A literature review. Silva Fennica, 52(4), 1—29. DOI: 10.14214/sf.9984
- Kogler C., Rauch P. (2019). A discrete event simulation model to test multimodal strategies for a greener and more resilient wood supply. Canadian Journal of Forest Research, 49, 1298—1310. DOI: 10.1139/cjfr-2018-0542
- Kons K., La Hera P., Bergstrom D. (2020). Modelling dynamics of a log-yard through discrete-event mathematics. Forests, 11(2), 155. DOI: 10.3390/f11020155
- Lin P., Contreras M.A., Dai R., Zhang J.A. (2016). A multilevel ACO approach for solving forest transportation planning problems with environmental constraints. Swarm and Evolutionary Computation, 28, 78—87. DOI: 10.1016/j.swevo.2016.01.003
- Lin P., Dai R., Contreras M.A., Zhang J. (2017). Combining ant colony optimization with 1-opt local search method for solving constrained forest transportation planning problems. Artificial Intelligence Research, 6(2), 27. DOI: 10.5430/air.v6n2p27/
- Lin P., Zhang J., Contreras M.A. (2014). Applying pareto ant colony optimization to solve bi-objective forest transportation planning problems. In: Proceedings of the 2014 IEEE 15th International Conference on Information Reuse and Integration. DOI: 10.1109/IRI.2014.7051970
- Lotfalian M., Peyrov S., Adeli K., Pentek T. (2022). Determination of optimal distribution and transportation network (wood transportation in Iran). Croatian Journal of Forest Engineering, 43(2), 313—323. DOI: 10.5552/ crojfe.2022.1779
- Lundbâck M., Hâggstrôm C., Fjeld D., Lindroos O., Nordfjell T. (2022). The economic potential of semi-automated tele-extraction of roundwood in Sweden. International Journal of Forest Engineering, 33(3), 271—288. DOI: 10.1080/14942119.2022.2103784
- Marques A.F., de Sousa J.P., Rônnqvist M., Jafe R. (2014). Combining optimization and simulation tools for short-term planning of forest operations. Scandinavian Journal of Forest Research, 29(sup1), 166—177. DOI: 10.1080/02827581.2013.856937
- Moad K., François J., Bourrières J.P., Lebel L., Vuillermoz M. (2016). A bi-level decision model for timber transport planning. In: 6th International Conference on Information Systems, Logistics and Supply Chain ILS Conference. June 1—4, Bordeaux, France. Mobini M., Sowlati T., Sokhansanj S. (2011). Forest biomass supply logistics for a power plant using the discrete-event simulation approach. Applied Energy, 88(4), 1241-1250. DOI: 10.1016/j.apenergy.2010.10.016
- Mohd Hasmadi I., Kamaruzaman J. (2009). Planning of access road using satellite technology and best path modeling. Modern Applied Science, 3(3), 83. DOI: 10.5539/mas.v3n3p83
- Naghavi S., Karbasi A., Kakhki M.D. (2020). Agent based modelling of milk and its productions supply chain and bullwhip effect phenomena (Case study: Kerman). International Journal of Supply and Operations Management, 7(3), 279-294. DOI: 10.22034/IJSOM.2020.3.6
- Najafi A., Richards E.W. (2013). Designing a forest road network using mixed integer programming. Croatian Journal of Forest Engineering, 34(1), 17-30.
- Niazi M.A. (2011). Towards a Novel Unified Framework for Developing Formal, Network and validated Agent-Based Simulation Models of Complex Adaptive Systems. Ph.D. Thesis. University of Stirling. Olsson B.A., Hannrup B., Jonnsôn M. et al. (2107). A decision support model for individual tree stump harvesting options based on criteria for economic return and environmental protection. Scandinavian Journal of Forest Research, 32(3), 246-259. DOI: 10.1080/02827581.2016.1236983
- Palmgren M., Rônnqvist M., Vârbrand P. (2003). A solution approach for log truck scheduling based on composite pricing and branch and bound. International Transactions in Operational Research, 10(5), 433-447. DOI: 10.1111/1475-3995.00420
- Palmgren M., Rônnqvist M., Vârbrand P. (2004). A near-exact method for solving the log-truck scheduling problem. International Transactions in Operational Research, 11(4), 447-464. DOI: 10.1111/j.1475-3995.2004.00469.x
- Parsakhoo A., Mostafa M., Shataee S., Lotfalian M. (2017). Decision support system to find a skid trail network for extracting marked trees. Journal of Forest Science, 63(2), 62-69. DOI: 10.17221/36/2016-JFS
- Peyrov S., Lotfalian M., Adeli K., Pentek T. (2021). Optimization of wood distribution and transportation network with emphasis on rail transport. Journal of Forest Research and Development, 7(3), 427-441. DOI: DOI: 10.30466/ jfrd.2021.121097
- Puodziunas M., Field D. Roundwood handling at a Lithuanian sawmill - discrete-event simulation of sourcing and delivery scheduling. Baltic Forestry, 14(2), 163-175+223.
- Rey P.A., Muñoz J.A., Weintraub A. (2009). A column generation model for truck routing in the Chilean forest industry. INFOR: Information Systems and Operational Research, 47(3), 215-221. DOI: 10.3138/infor.47.3.215
- Rix G., Rousseau L.M., Pesant G. (2015). A column generation algorithm for tactical timber transportation planning. Journal of the Operational Research Society, 66(2), 278-287. DOI: 10.1057/jors.2013.170
- Saranen J., Hilmola O.-P. (2007). Evaluating the competitiveness of railways in timber transports with discrete-event simulation. World Review of Intermodal Transportation Research, 1(4), 445-458. DOI: 10.1504/ WRITR.2007.017097
- Shabani N., Sowlati T. (2013). A mixed integer non-linear programming model for tactical value chain optimization of a wood biomass power plant. Applied Energy, 104, 353-361. DOI: 10.1016/j.apenergy.2012.11.013
- She J., Chung W, Kim D. (2018). Discrete-event simulation of ground-based timber harvesting operations. Forests, 9(11), 683. DOI: 10.3390/f9110683
- Sinha A.K., Aditya H.K., Tiwary M.K., Chan F.T.S. (2011). Agent-oriented petroleum supply chain coordination. Expert Systems with Applications: An International Journal, 38(5), 6132—6145. DOI: 10.1016/j.eswa.2010.11.004
- Skobelev P. (2015). Multi-agent systems for real time adaptive resource management. In: Leitao P., Karnouskos S. (Eds). Industrial Agents: Emerging Applications of Software Agents in Industry. Elsevier.
- Van Dyken S., Bakken B.H., Skjelbred I. (2010). Linear mixed-integer models for biomass supply chains with transport, storage and processing. Energy, 35(3), 1338—1350. DOI: 10.1016/j.energy.2009.11.017
- Wolfsmayr U.J., Merenda R., Rauch P., Longo F., Gronalt M. (2016). Evaluating primary forest fuel rail terminals with discrete event simulation: A case study from Austria. Annals of Forest Research, 59(1), 145—164. D0I:10.15287/afr.2015.428
