Методы и алгоритмы разделения смеси сигналов. I. Применение декорреляции и статистик второго порядка

Автор: Меркушева А.В., Малыхина Г.Ф.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Математические модели
Статья в выпуске: 2 т.19, 2009 года.
Бесплатный доступ
Анализируется задача разделения смеси сигналов (с восстановлением вида ее компонент) при отсутствии информации о пропорциях и типе смешивания. Доступная измерительная информация поступает в информационно-измерительную систему с ее сенсоров. Рассмотрены методы и структура алгоритмов, необходимых для разделения смеси сигналов. Алгоритмы основаны на декорреляции многомерного измерительного сигнала, разложении ковариационной матрицы по собственным значениям и на использовании нейронной сети.
Сигналы, смесь, разделение, методы, алгоритмы, декорреляция, нейронная сеть
Короткий адрес: https://sciup.org/14264602
IDR: 14264602 | УДК: 681.51;
Methods and algorithms for decomposition of signal mixture I. Application of decorrelation and second order statistics
The problem of signal mixture decomposition (with reconstruction of the form of its components) is analyzed with no information concerning the proportions and type of mixing. The available measurement information enters the IMS from its sensors. Methods and algorithm structures (necessary for mixture decomposition) are studied. The algorithms are based on decorrelation of multi-dimension signal, covariation matrixes decomposition, and on using the neural network.
Текст научной статьи Методы и алгоритмы разделения смеси сигналов. I. Применение декорреляции и статистик второго порядка
В области обработки многомерных сигналов значительную роль играет декорреляция компонент сигнала, которая может быть как внутриканальной ("временной") или межканальной ("пространственной"), так и полной, т. е. пространственно-временной. Способы декорреляции основаны на статистиках второго порядка (СВП) и применяются в методе подпространств для спектрального анализа и обработки массивов. Декорреляция часто применяется на стадии предварительной обработки и способствует улучшению свойства сходимости в адаптивной системе, уничтожению избыточности или снижению шума. Пространственная декорреляция (называемая также отбеливанием) считается необходимым (но не достаточным) условием для применения более сильных вероятностных критериев независимости сигналов. После отбеливания задачи разделения сигналов смеси или анализа главных компонент (АГК) [1], [2], [3] становятся легче и в значительно меньшей степени плохо обусловленными [4], т. к. после отбеливания разделение компонент смеси (РКС) оп- ределяется уже ортогональной матрицей. Кроме того, как будет показано, пространственновременная и временная декорреляции могут быть использованы для идентификации матрицы, смешивающей компоненты первичного многомерного сигнала, и, таким образом, для разделения сигналов смеси — первичных сигналов источника (СИ). Для этой цели служат адаптивные и устойчивые к шуму алгоритмы (УША) пространственного отбеливания, ортогонализации, пространственновременной и задержанной во времени декорреляции без дополнительной информации о процессе смешивания компонент СИ. Дополнительно ниже будут рассмотрены УША для разделения нестационарных сигналов смеси.
ПРОСТРАНСТВЕННАЯ ДЕКОРРЕЛЯЦИЯ — ПРЕОБРАЗОВАНИЕ ОТБЕЛИВАНИЯ
Для ряда алгоритмов, которые используются с целью разделения сигналов смеси (РСС), регистрируемых на сенсорах информационно-измерительной системы (ИИС), требуется отбеливание.
сенсоров x ( k ), представляющего результат смешивания H компонент первичного сигнала источника s ( k )
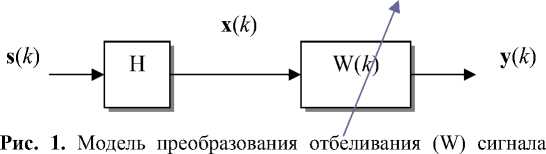
Случайный вектор-сигнал у (со средним, равным нулю) считается "белым", если его ковариационная матрица R уу = { у - у т } = I „ , т. е. Е{ yy^ } = 5е . 1) При отбеливании над вектором-сигналом x ( к ) (на сенсорах), который является результатом процедуры смешивания H первичного m -вектора-сигнала s ( к ) (H и s — неизвестного вида), осуществляется предварительная обработка в форме преобразования (рис. 1): у ( к ) = W - x ( к ), где x ( к ) = H - s ( к ).
Таким образом, у ( к )— отбеленный вектор, W — отбеливающая ( n х m ) матрица, причем если m > n (и известно n ), то W одновременно снижает размерность вектора данных с m до n .
Матрица W выбирается так, чтобы ковариационная матрица Е{ у - у т } стала единичной матрицей I n , и, следовательно, компоненты отбеленных векторов у ( к ) взаимно не коррелированны и имеют единичную дисперсию
R уу = Е{ у - у т } = E{W - x - x T - W T } =
= W-R xx - W T = I.
Ковариационная матрица (КМ) сигналов сенсоров x ( к ) является симметричной и положительно определенной и может быть представлена своим разложением
R xx = V x - Л х - V x = V x - л X /2 - л X /2 - V x T , (1)
где V x — ортогональная матрица и Л x = = Диаг .{ Л , Л 2 ,..., Л п } — диагональная матрица с положительными собственными значениями Л > /_ . > ,..., д , > о.
Матрица декорреляции W (называемая отбеливающей матрицей (ОМ), или преобразованием Махаланобиса [5]) выражается соотношением (2) или (3):
W = Л - 1/2
т 1 1
- Vx = Диаг. ^ -.=,-.=
W = U- Л-1/2 - Vx, тН'V- (2)
Л п
где U — произвольная ортогональная матрица (т. е. U - U T = I n ).2)
В случае, если x ( к ) = v ( к ) и v ( к ) — окрашенный гауссов шум с R vv = E{ v - v T } ^ ст 2-1 n , то отбеливающее преобразование превращает его в сигнал белого шума (сигнал с одинаково распределенными и (статистически) независимыми отсчетами (ОРНО)).
Для численной оценки ОМ матрицы W целесообразно использование адаптивного алгоритма, для которого требуется критерий оптимизации. Система декорреляции у ( к ) = W - x ( к ) использует выход системы смешивания x ( к ) = H - s ( к ) и обеспечивает диагональную форму КМ: R уу = = Е{ уу т } = Л, где Л = Диаг . Ц , ^ 2 ,..., Л п } (в частности, Л = I n ).
Выходные сигналы у будут некоррелированными, если Е{ yy j } = 0 при i ^ j ( V i , j ) и r ii = Е{ y2} = Л > 0, ( V i ), поэтому высокая степень декоррелированности соответствует минимуму n n 2
критерия J2 (W) = (1 /2)! !|rj | при ограниче-i =1 i =1; j * i нии ri ^ 0 (например, ri = 1 для Vi).
Адаптивный алгоритм получения ОМ W при условии равных дисперсий
Критерий для этого случая имеет вид3)
nn
J 2(W) = (1 / 4) !! (Е{ yy} - Л5 ,)2 = i = 1 j
= -4||Е{ уу T} - Л| f.
Для получения адаптивного алгоритма используется преобразование (4):
R уу = Е{ уу T } = E{W xx T W T } =
= E{WH T S (WH) T } = GR ss G T = GG T , (4)
где G = W - H — объединенная матрица преобразования от s к у, и можно принять, что R ss = E{ s - s T } = I n .
Критерий оптимизации (КО) приобретает форму J 2(W) = 4|gg t - л| |2 = 4 tr { ( GG T - Л ) - ( GG t - Л ) } . Минимум КО реализуется методом градиентного
R =Е{уут}= A-1/2.Vt-V-A -Vt- Л-1/2 = 1
yy yy xxxxxx n nR = U-A-1/2-Vt-V-A -Vt-V -A-1/2-Ut=I уу x x x x x x x n '
спуска, который определяет процедуру (5) получения элементов матрицы G. С учетом того, что R yy = GG T , (5) преобразуется в (6):
dH/d t ~ 0 ), матричная форма приобретает вид
dW
-—H = ц (Л - R yy ) - WH d t
и, следовательно,
dgj = - 9J2(W) f f JW) 9rrkp_ dt dgy k=1 p-I arkpj agtJ ’
dW
-- = ц (Л - R yy ) - W. d t
Это выражение соответст
вует алгоритму в дискретном времени:
nn
2 A g y-S r k g kj - T r pi g pj k = 1 p = 1
ц
С учетом симметрии КМ R yy , т. е. r j = r , (6) приобретает более простую форму
d g j
= Ц dt
n
2Agy -E rikgkj k=1
( i , J = 1,2,
n )•
В матричном виде (7) соответствует выраже-
нию
dG т
— = ц (Л - R yy ) - G = ц (Л - GGT) - G, а при-d t
нимая во внимание, что G = W - H, и считая, что H очень медленно изменяется со временем (т. е.
W( i +1) = W( i) + n (Л - Ryly)) - W( i).(8)
При равных дисперсиях Л = I, и (8) переходит в (8 ):
W( i +1) = W( i) + n (I - R(l?) - W( i).(8
КМ R yy может оцениваться с помощью выражения
N-1
R y = (y - y T) =- Е y ( i ) ( k ) [ y ( i ) ( k ) ] ,
N k=0
где y ( i ) ( k ) = W( i ) - x ( k ).
Альтернативно, можно оценивать матрицу декорреляции (или ОМ) в реальном времени (РВ), используя подход на основе скользящего среднего [6] и следующие преобразования:
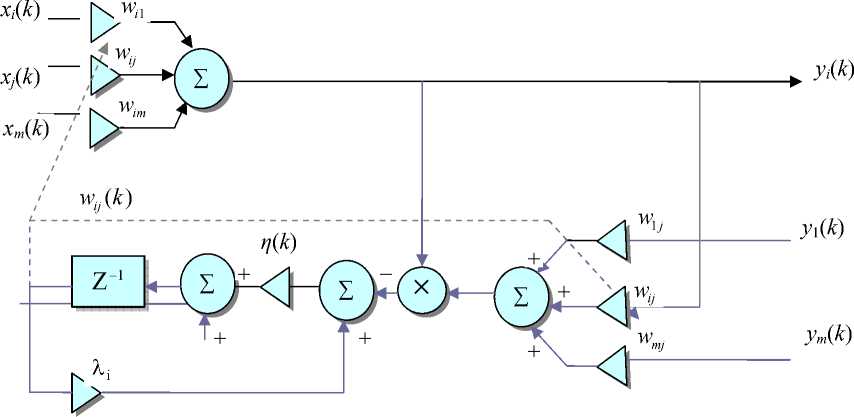
Рис. 2. Блок-схема процедур, обеспечивающих выполнение обучающего алгоритма (11)
W( к + 1) = W( k ) + п (к ) ( л - I^) ) W( к ) = = W( к ) + n ( к ) ( л - W( к ) 1< к W T ( к ) ) W( к ), где 0 < п ( к ) < 0.5;
R* = (1 — п ИД . + П о У ( к ) у т( к ), где п 0 G [0,1] — скорость обучения.
Для обучения в РВ можно быстро (хотя и более грубо — без операции математического ожидания) оценить КМ по соотношению R yy ) = у ( к ) у т ( к ). Тогда алгоритм обучения (вместо (8)) будет иметь более простой вид (11) (см. рис. 2):
A W( к ) = W( к + 1) - W( к ) =
= П ( к ) ( л - У ( к ) у Т ( к ) ) • W( к )•
При Л = I (11) упрощается до (11 * ):
A W( к ) = W( к + 1) - W( к ) =
= п ( к ) ( I - у ( к ) у т ( к ) ) W( к ).
(11*)
Разделение компонент смеси (РКС) при декорреляции измерительных сигналов и пространственная декорреляция
Все правила отбеливания могут использоваться для алгоритмов РКС на основе нейронной сети. Алгоритм, который итеративно использует правило (11) при условии Л = I, достигает равновесия, когда КМ выходного сигнала R уу становится равной
R уу = Е{ у • У T } = E{W xx T W T } =
-
= WE{ xx T }W T = WR xx W T = I n . (12)
Поэтому, принимая симметричность матрицы W, можно получить точку равновесия W * :
W * = R - x /2 = V x Л - 1 /^ , (13)
где V x — ортогональная матрица (т. е. W W T = I n ); Лx — диагональная матрица, полученная разложением КМ (R xx ) по собственным значениям:
T xx x x x .
Это значит, что сигналы выхода у, (к) будут взаимно ортогональными и с единичной дисперсией. В общем случае "пространственная" декорреляция недостаточна для разделения сигналов даже при линейной их смеси. Однако если смешивающая матрица H симметрична, то алгоритм декорреляции с симметричной ОМ W непосредственно выполняет РСС, поскольку при простом предположении, что Rss = In, выполняется условие R„ = H2. Следовательно, W = H-1 = R-’/2 = xx * xx
= V Л-V2vT v x 2 ^x v x .
Удаление смещения, присущего зашумленным данным
Если измерительные данные сигналов на сенсорах зашумлены, т. е. x ( к ) = x ( к ) + v ( к ) и при этом x ( к ) = H s ( к ) и у ( к ) = W( к ) x ( к ) являются оценками (векторных) сигналов на сенсорах и на выходе ОМ без компоненты шума, то аддитивный шум v ( к ) в составе x ( к ) вносит смещение в оценки декоррелирующей матрицы W. КМ выходных векторов определяется выражением
R уу = Е{ у • У T } = WR xx W T + WR vv W T , (14)
где R xx = E{ x ( к ) • x T ( к ) }; R vv = E{ v ( к ) • v T ( к )}.
Принимая, что КМ шума можно оценить (т. е. R vv = G V " I ), модифицированный адаптивный алгоритм (11*), дающий удаление смещения, имеет вид:
A W( к ) = п ( к )[I - куу > + W( к )R vv W T ( к )] W( к ), (15) где ^ = (1 - n -R^ + п у ( к ) у T ( к )•
Для R vv = g V I алгоритм (11 * ), работающий в РВ со стохастическим градиентом, определяется выражением
A W( к ) =
-
= п ( к ) ( I - у ( к ) у T ( к ) + G W( к ) W T ( к ) ) W( к ). (16)
Устойчивый к шумам алгоритм отбеливания с обучающими выборками (batch algorithm)
Для данных с шумами, кроме адаптивного алгоритма без смещения, связанного с наличием шума, может быть применен алгоритм отбеливания с обучающей выборкой. Такой подход иногда называют методом, основанным на подпространствах. Для наиболее простого случая, когда КМ шума можно моделировать в виде R vv = G 2 1, а дисперсия шума мала (т. е. отношение сигнал/шум относительно велико — превосходит некоторый порог), использование этого метода позволяет сравнительно просто оценить дисперсию шума и число компонент источника сигналов. Устойчивый к шумам алгоритм отбеливания (декорреляции) включает следующие этапы.
-
1) Вычисление КМ по измерительным данным (по так называемой "выборочной" КМ): R xx = HR ss H T + C V I m = HH T + C V I m . Эта оценка
Диаг . <

выполняется асимптотически (при достаточно большой выборке) и в предположениях независимости сигналов — компонент смеси, единичной их дисперсии и отсутствия корреляции с белым шумом.
-
2) Вычисление разложения КМ по собственным значениям:
A гр
T xx x x x
= [V s V ]
(V s ,V n ] t =
= Vs Лs VT + Vn Лn VN, где VS g Rmхn, т. е. V — матрица размерности (m х n), содержащая собственные векторы, связанные с n главными собственными значениями в матрице VS = Диаг.{1,12,...,In} с убывающими величи-нами4).
-
3) Оценка C 2 путем вычисления средней величины ( m – n ) младших собственных значений и определение ранга матрицы H . Это может быть выполнено поиском большого зазора в распределении собственных величин или применением информационного критерия Акаике (Akaike) [8].
-
4) Определение ОМ5) :
W = лs1/2vT = [Лs - cv:I]-1/2Vj = и отбеленный вектор-сигнал сенсоров — y = W- x.
МЕТОД РСС, ОСНОВАННЫЙ НА СВП И ВРЕМЕННÓЙ СТРУКТУРЕ СИГНАЛОВ
Решение задач разделения сигналов смеси состоит в идентификации смешивающей матрицы (ИСМ), т. е. матрицы H или ее псевдообратной6). Метод ИСМ основан на совместном использовании статистик второго порядка (корреляционных матриц сигналов с различными временными задержками) и временнóй структуры сигналов источника (СИ). Этапы реализации метода включают процедуры, обеспечивающие разложение по собственным значениям (РСЗ), обобщенное разложение по собственным значениям (ОРСЗ) и процедуры, определяющие одновременную диагонализацию (ОД). Сигналы источника (СИ) ( n -вектор s ( k ) — компоненты смеси) могут иметь произвольное распределение, но не исчезающие временные корреляции. Таким образом, анализируется модель смешивания, в которой m -мерный вектор — сигнал сенсоров x ( k ) = H s ( k ) + ν ( k ) формируется неизвестной ( m х n ) -матрицей H, причем m > n , а v ( k ) — аддитивный вектор шума, независимый от s ( k ).
Таким образом, задача ИСМ или РСС осуществляет оценку смешивающей матрицы H или псев-дообратной (разделяющей смесь) матрицы W = H + , обеспечивающей получение первичных СИ s ( k ), исходя только из конечного числа данных наблюдения { x ( k )}, k = 1,…, N . При этом все алгоритмы РСС, не использующие априорной информации, дают результат с элементом неопределенности относительно масштаба и порядка компонент восстановленного сигнала s ( k ). Так, оценка H смешивающей и W разделяющей матриц удовлетворяет соотношению G = W - H = H + H = PD, где G— общее преобразование, объединяющее системы смешивания и разделения сигналов; P — некоторая матрица перестановок; D — масштабирующая матрица. Такая степень неопределенности, как правило, не бывает существенной при анализе результата РСС, т. к. важен вид компонент СИ s ( k ).
Для задачи РСС нередко используют предположение о статистической независимости компо- нент СИ, поэтому иногда перепутывают анализ независимых компонент (АНК) и РСС. Однако для разделения сигналов можно использовать более слабое условие, принимая, что они имеют временные структуры с различными автокорреляционными функциями (АКФ)7) и/или они нестационарны с изменяющимися по времени дисперсиями. Методы, которые используют либо временнýю структуру источников (главным образом корреляции второго порядка), либо их нестационарность, являются методами, основанными на применении статистик второго порядка. Эти методы (в отличие от метода РСС, основанного на статистиках высокого порядка), не подразумевают определенности о распределении источников или о нелинейности активационной функции нейронов сети [10].
Таким образом, далее будут рассмотрены методы и алгоритмы РСС, которые для получения ИСМ используют обучение на отдельных интервалах сигналов сенсоров и их пространственно-временнýю декорреляцию. При этом предполагается присутствие пространственно коррелированных, но белых (для каждого сенсора) шумов, которые не обязательно должны быть гауссовыми. Кроме того, для подходящего набора задержанных по времени корреляций измерительных данных получена устойчивая к шумам оценка СМ H. Основные положения, на которых базируется последующий анализ.
П.1. Смешивающая матрица H имеет полный ранг.
П.2. Источники пространственно некоррелиро-ваны, имеют различные автокорреляционные функции, но в то же время в каждом канале они являются коррелированными по времени (окрашенными) стохастическими сигналами с нулевым средним.
П.3. Источники являются стационарными или нестационарными сигналами 2-го порядка (т. е. с дисперсиями, которые изменяются со временем).
П.4. Шумы V ( к )} являются независимыми от СИ, могут быть пространственно коррелированными, но во временнóй шкале они белые, т. е. E{ v ( к ) v T ( к - p )} = R v ( p ), где 5 p 0— символ Кронекера, R v — произвольная ( m х m ) матрица
Основные процедуры: одновременная диагонализация и разложение по собственным значениям
С учетом основных допущений (положения П.1–П.4) корреляционные матрицы вектора сигна- лов на сенсорах x(k) удовлетворяют соотношениям (при p * 0):
R x (0) - E{ x ( к ) x T ( к )} = HR s (0)H T + R v (0); (17)
R x ( p ) - E { x ( к ) x T ( к - p )} = HR s ( p ) H T .
Из П.2 следует, что R s (0) = E{ s ( к ) s T ( к )} и R s ( p ) = E { s ( к ) s T ( к - p )} являются ненулевыми различными диагональными матрицами.
В случае, если число сенсоров больше, чем компонент смеси, и КМ шума имеет специальную форму R vv = R v (0) = E{ v ( к ) v T ( к )} = т. I m , тогда дисперсия шума Т (для относительно высокого отношения сигнал/шум) может быть оценена по наименьшему собственному значению матрицы R x (0) (или по среднему значению ( m – n ) младших собственных значений этой матрицы), а несмещенная КМ R x (0) оценена в виде
R x (0) = R x (0) - т I „ = HR s ( p )H T .
Для того чтобы оценить смешивающую матрицу H (с точностью до масштабирования и перестановки), следует выполнить одновременную диагонализацию двух КМ: R x (0)и R x ( p ) в соответствии с (17)8).
При числе сенсоров, равном числу СИ ( m = n ) выполнение одновременной диагонализации двух КМ (ОД_2КМ), включает два этапа9). ˆ
-
1) Оценивается первая КМ: R x (0) = (1/ N ) х х ^ N = 1 ( x ( к ) x T ( к ) ) - т 21 n , и для нее выполняется РСЗ: R x (0) = V x Л x V x T . После этого выполняется отбеливание посредством линейного преобразования x ( к ) = Q x ( к ) = Л - 1/2 V x T x ( к ), где Q = Л - 1/2 V x T . Это приводит к двум соотношениям:
R x (0) —
-
— (1/ N ) • Z L [ x ( k ) x T ( k )] = QR x (0)Q T = I n ,
R x ( p ) —
-
— (1/ N ) • Z* N , [ x ( k ) x T ( k - p )] = QR x ( p )Q T . k 1
2) Используется ортогональное преобразование для матрицы R x ( p ). РСЗ для R x ( p ) имеет вид R x ( p ) — V x A x V x . На основе (17) и (18) получается соотношение
R x ( p ) — QR x ( p )Q T — QH R s ( p ) H T Q T .
Следовательно (при различающихся собственных значениях (СЗ) матрицы Л x ), смешивающая матрица выражается соотношением H — Q - 1 V x —
-
— V x A x 2 V x , и оценка ее получается с точностью до масштаба и матрицы перестановок.
В случае, когда число сенсоров больше количества СИ ( m > n ) алгоритм для ИСМ более сложен. Процедуры, обеспечивающие выполнение алгоритма, можно разбить на шесть этапов.
-
1) Оценка КМ сигналов сенсора:
R x (0) — (1/ N ) Z N >( k ) x T ( k )].
-
2) Выполнение РСЗ для R x (0):
R x (0) — U x E x v x — V x A x v x —
-
— V Л S V j + V n л n V T ,
где ( m x n )-матрица V S — [ v 1 , v 2,..., v n ] содержит собственные векторы, связанные с n главными собственными значениями матрицы Л S — — Диаг . ^ > A 2 > ,..., A n ] (в убывающем порядке). Аналогично, ( m х ( n - 1 ) ) -матрица V N содержит собственные векторы шума, соответствующие собственным значениям10)
Л n — Диаг . Ц ,+ 1 > A n + 2 > ,..., А т } (при A n > A n + 1 ).
-
3) Оценка дисперсии о ^ белого шума как среднее значение ( m - n ) младших СЗ.
-
4) Выполнение (устойчивого относительно белого шума) преобразования отбеливания x ( k ) — Л -1/2 V j x ( k ) — Q x ( k ) , где A S — — Диаг .{( A 1 - r v), A - r l^. a - r i:.
-
5) Оценка КМ вектора x ( k ) для временной задержки p (хороший результат дает p = 1) и выполнение РСЗ для КМ R x ( p ) — (1/ N ) х x Z N — 1 [ x ( k ) x T ( k - p )] — U x E x V T .
-
6) Проверка того, что для выбранного p все СЗ матрицы E x различны. Если нет, то повторение этапа 4) с другим значением p .
При условии, что все СЗ различны и отстоят друг от друга достаточно далеко, можно оценить СМ H и (если необходимо) зашумленные СИ s :
H — Q + U x — V S A j /2U x ;
y ( k ) — s( k ) — U T x ( k ) — U T A -1/2 V j x ( k ).
Достаточно часто уже при p = 1 алгоритм успешно разделяет окрашенные источники с различающимися спектрами мощности, однако точность результата снижается при наличии существенного шума [11]. Устранение этого недостатка позволяет использование двух КМ R х ( p 1 ) и R x ( p 2) при p 1 ^ p 2. Т к. по временной характеристике шум — белый и, следовательно, R x ( p 1 ) — HR s ( p JH T ; R x ( p 2 ) — HR , ( p 2 )H T , то получается не зависящая от шума оценка матрицы W, реализующая РСС независимо от распределений вероятности и пространственной структуры (межканальной корреляции) вектора шума [12].
УСОВЕРШЕНСТВОВАННЫЙ АЛГОРИТМ ИСМ НА ОСНОВЕ СВП И СИММЕТРИЧНОГО
СПОСОБАРСЗ
Улучшенные характеристики алгоритма для ИСМ (применительно к методам анализа независимых компонент [3] или РСС) достигаются при использовании "средней структуры СЗ" для набора КМ или матриц кумулянт [13], [14], имеющих различающиеся временные задержки. Из-за ограниченности объема измерительных данных (искаженных наличием шума) в структуре СЗ этих матриц есть различия, а в отдельных случаях СЗ могут быть вырожденными (т. е. некоторые из СЗ совпадают). Поэтому в рассматриваемом алгоритме полезно использовать достаточно большой набор матриц [15].
Устойчивая к шуму ортогонализация СМ для окрашенных сигналов
Для модели смеси СИ х ( k ) = H s ( k ) + v ( к ), где х ( к ) — измеряемый m -вектор сигналов сенсоров, H — ( m х n )-СМ полного ранга, s ( к ) — n -вектор коррелированных по времени СИ, задача (устойчивой к шуму — робастной) ортогонализации состоит в получении линейного преобразования х ( к ) = Q х ( к ), такого что общая ( n х n )-СМ A = QH является ортогональной и не имеющей смещения, обусловленного аддитивным белым шумом v ( к ).
Робастная ортогонализация (РО) приводит общую (объединенную) СМ к ортогональной форме и является важной процедурой предварительной обработки для ряда методов РСС. РО реализует линейную комбинацию КМ, нечувствительную к аддитивному белому шуму. Комбинация имеет вид: R x ( а ) = £ K a R x ( p i ), где K = 5-20 [16].11 ) При подходящем выборе коэффициентов { а , } матрица R x ( а ) — симметричная и положительно определенная (СПО).
Алгоритм РО включает этапы, отражающие основные преобразования и логику процедур решения задачи ортогонализации.
-
1) Оценка набора КМ вектора-сигнала сенсоров для выбранных временных задержек ( p 1 , p 2,..., pK ) и получение ( m х mK )-матрицы R = [R х ( P 1)--R X ( Р к )], в которой R х ( p ) = = ( Д x ( к ) x T ( к - P i )) + (x ( к - P i ) x T ( к )} ) • ( 1/ 2 ) . Для матрицы R проводится РСЗ, т. е. R = U - E • VT, где U = [U s U v ]— ( m х m )-матрица (U s = [ur .. u n ] размера ( m х n )); V — ( mK х mK )-ортогональная матрица; E — ( m х mK )-матрица, у которой левые n столбцов содержат подматрицу Диаг. { т 1 , т 2 ,..., T n } (при невозрастающем порядке величин T i ), а правые ( mK - n ) столбцов равны нулю12 ) . Число неизвестных СИ n может быть определено как число главных СЗ (за которыми следуют младшие СЗ, соответствующие векторам
подпространства шума). При этом предполагается, что КМ шума R v = т 2 1 m и дисперсия шума относительно низкая, т. е. T V << T n .
-
2) Вычисление R i = U T R х ( p i )U s для i = 1,2,..., K .
-
3) Выбор начального вектора параметров а = [ а 1, а 2,..., a K ] .
-
4) Вычисление R = ^ K a i R i .
-
5) Вычисление РСЗ матрицы R; проверка, что R положительно определенная: если да, то переход к 7, если нет, то к 6.
-
6) Выбор собственного вектора u, соответствующего наименьшему СЗ матрицы R, и обновление а , с заменой а на а + 8 , где 8 =
-
7) Вычисление СПО матрицы R х ( а ) = = Е K a i R х ( p i ) и выполнение РСЗ матрицы R х ( а ):
R х ( а * ) = [U s ,U n ] •
E S 0 0 E n _
• [U s ,U n ] T ,
где а * — набор параметров a i после сходимости алгоритма, а матрица U S содержит собственные векторы, связанные с n главными СЗ матрицы E s = ДиагД т р Т р..., T n }.
-
8) Выполнение преобразования робастной ортогонализации: х ( к ) = Q ^ х ( к ), где Q = E S 1/2 U T .
Описанный алгоритм целесообразно дополнить следующими замечаниями.
— Алгоритм сходится независимо от выбора начальных условий для а [16]13).
— В случае отсутствия шума последние ( m - n ) СЗ матрицы R х ( а ) равны нулю, так что E n = 0.
— При равном числе СИ и сенсоров ( m = n ) пп. 1) и 2) в алгоритме не нужны. Просто полагаем R i = R х ( p i ) = ( R х ( p i ) + R T ( p i ) ) - 1/2.
— Для m > n линейное преобразование х = Q х(к), кроме ортогонализации, позволяет оценить число СИ, т. е. матрица ортогонализации понижает массив сигналов сенсоров до n-мерного вектора, поэтому при условии, что отношение сигнал/шум относительно высоко, можно оценить число СИ.
― Если определить новую смешивающую матрицу в виде A = QHD 1/2 , где D = ^ i t a i R( Р i ) — диагональная (масштабирующая) матрица с положительными элементами, то AA T = I n (т. е. матрица A ортогональная). Таким образом, условие ортогональности необходимо для РСС с помощью процедуры РСЗ.
Алгоритм, основанный на обобщенной процедуре РСЗ
С использованием робастной ортогонализации строятся усовершенствованные варианты алгоритма ИСМ, основанные на простой процедуре РСЗ или обобщенной, ОРСЗ.
Набор матриц {R 1 - X- R2} (R 1— симметричная, R2 — симметричная и положительно определенная матрица, X — параметр, принимающий различные значения) называют симметрично определенным пучком матриц (СОПМ)14). Для СОПМ существует матрица V = [ v 1 . . v n ] , которая выполняет одновременную диагонализацию R1 и R2 :
V T R 1 V = D , ; V T R2 V = D2 (19) при условии, что диагональная матрица D 1 D - 1 имеет не равные элементы. Это можно преобразовать в задачу ОРСЗ следующим образом:
R , V = R 2 V Л, (20)
где Л = Диаг .{ Х , X 2,..., X n } = D 1 D - 1 (или R 1 v , = = X i R2 v , , i = 1,2,..., n ) при условии, что все собственные значения X , = X i ( D 1 ) / X i ( D 2) различны.
Из условия (20) совместной диагонализации матриц, образующих СОПМП, следует, что обобщенный собственный вектор V является решением в том смысле, что H = (V T ) - 1 .
Алгоритм имеет недостатки, отмеченные Чои, Сичоки и Амари (Choi, Cichocki, Amari) [10]: при некоторых значениях p1и p2 КМ Rx(Pi) = Ri и Rx(p2) = R2 не могут быть положительно определенными, а иногда ошибка за счет шума затрудняет получение симметричности этих матриц. Последний недостаток исключает- ся за счет замены Rx(p1) и Rx(p2) и Rx(p2):
на R x ( p 1)
R x ( Р 1 ) = 0.5{R x ( Р 1 ) + R T ( Р 1 )}; R x ( p 2 ) = 0.5{R x ( p 2 ) + R T ( Р 2 )}.
^
Если же матрица R x ( p 2) не является положительно определенной, то вм е сто нее вводится линейная комбинация КМ R x ( а ) = £ K a , R x ( Р , ) и набор коэффициентов { а , } выбирается так, чтобы матрица R x ( α ) была положительно определенная.
Алгоритм двухэтапного симметричного РСЗ
Вместо подхода на основе ОРСЗ для ИСМ возможно использование обычного симметричного РСЗ в двухэтапной форме. Считая, что число СИ неизвестно и сигналы на сенсорах искажены шумом, а также используя набор КМ и описанные процедуры робастной ортогонализации, мы можем алгоритм с двухэтапным симметричным РСЗ представить в виде следующей последовательности процедур.
-
1) Выполнени е робастного ортогонального преобразования x ( k ) = Q x ( к ) так, чтобы объединенная матрица смешивания A = QH была ортогональной.
-
2) Вычисление линейной комбинации набора КМ вектора x ( k ) с задержками времени { p }:
R x ( в = z ,M 1 / И x ( р )
при произвольных Д .
-
3) Выполнение РСЗ (или ОРСЗ) в виде: R _ ( Д ) = U _ -2 x - U T и проверка того, что у набора параметров Д и p i у диагональной матрицы 2 x все СЗ различны. Если нет, то повторение 2 и 3 с отличающимся набором параметров. При различающихся и достаточно удаленных друг от друга СЗ можно оценить (без смещения за счет шума) СМ: H = Q + U x и оценить СИ:
у ( к ) = S ( к ) = U x x ( к ) = U T Q x ( к ). (22)
ОБЪЕДИНЕННАЯ ДИАГОНАЛИЗАЦИЯ
Помимо рассмотренного алгоритма с усредненной структурой СЗ и использованием РСЗ и ОРСЗ для решения задачи идентификации смешивающей матрицы может применяться процедура приближенной объединенной диагонализации [18], [19]. Целью этой процедуры является получение (ортогональной) матрицы U, которая диаго- нализирует сразу несколько матриц
M i = UD i U T + E i ( i = 1,2,..., L ), (23)
где M i — ( n x n )-матрица данных (КМ с задержкой времени, или матрица кумулянт); D i — диагональная матрица; ε i — аддитивная ошибка; U — матрица шумов. Для L > 2 задача переопределена и имеет только приближенное решение.
Приближенная объединенная диагонализация (ПОД) выполняется с использованием минимиза- L 2 ции критерия: J ( U , D i ) = 2| M i - UD i UT|| ; при- i = 1
чем минимизация осуществляется по матрице ортогонализации U и по набору диагональных матриц D i . Это достигается методом сменяемой частичной минимизации: сначала одного набора компонент критерия, а потом другого. Так, если на k -й итерации получена оценка U k , то следующим этапом минимизируется J (U k ,D i ) относительно набора D i .
Задача оценки матрицы U может решаться минимизацией вспомогательного критерия:
Ln 2
J (U)=-221 uTM. uJ = i =1 j =1
L 2
-
= - 2| |Диаг -{и т M i U}|| , (24)
i = 1
где ||Диаг .{-}||— норма вектора, состоящего из диагональных элементов матрицы.
Критерии предполагают, что матрица U ортогональная, а вектор измерительных данных на сенсорах предварительно обработан с использованием процедуры отбеливания. Матрицы M i имеют различную форму. В простом случае для окрашенных СИ с различающимися спектрами можно использовать КМ вида M i = R x ( p i ) = = E{ x ( k ) x T ( k - p i )} и для ИСМ применять алгоритм Белоучрани (Belouchrani) [20]. Для отбеленных сигналов сенсоров ортогональная СМ A определяется соотношением A = QH = U (при условии, что хоть одна из матриц D i имеет различные диагональные элементы). Оценка СИ имеет вид s ( k ) = U T Q( k ) x ( к ), а оценка СМ — H = Q+ U T .
Таким образом, робастный алгоритм для ИСМ на основе СВП включает следующие этапы [21]:
-
1) Выполнение процедуры робастной ортогонализации: x ( k ) = Q x ( k ).
N x2 x(k)xT (k - pi) = QRx (pi )QT для набора вре-k=1
менных задержек ( p 1, p 2,..., pL ) .
-
3) Выполнение ПОД: R x ( p i ) = UD i U T для V i , т. е. с использованием алгоритма Кардосо (Cardoso) [19] или Вакса (Wax) [23], оценивается матрица U.
-
4) Оценка СИ: s ( k ) = U T Q( k ) x ( k ) и СМ: H = Q + U .
Модификация алгоритма для ИСМ на основе СВП при нестационарных сигналах
Идентификация смешивающей матрицы, определяющее звено в цепи процедур, реализующих РСС, имеет свои особенности при нестационарных СИ. Метод использует информацию о временнóй структуре СИ. Аддитивный шум предполагается белым или нежелательные помехи и шум — стационарными.
Предварительно отбеленные измерительные данные на сенсорах разделяются на блоки (с временным окном T i ), для которых определяются КМ. Для случая, когда СИ имеют изменяющуюся дисперсию и неисчезающие временные корреляции, с учетом упомянутых ранее предположений П.1-П.4 выполняются соотношения:
R x (T , p , ) = AR , (T i , p , )A T , V i , I ; 5 R x ( T , j p , ) = A 5 R , (T , T j , p , )A T
V i , l,j > i ,
где A — ( n x n )-ортогональная смешивающая матрица; p l — временнáя задержка; T i — i -е вре-меннóе окно, а дифференциальная КМ определяется соотношением
5 R x (T i , T j ,pt ) = R , (T i , p , ) - R , ( T j ,pt ) ( i * j ). (26)
Таким образом, алгоритм на основе СВП для ИСМ при нестационарных сигналах источника включает следующие этапы [12], [23].
-
1) Применение робастной ор т огонализации и получение отбеленного вектора x ( k ) = Q x ( k ). На этом этапе используются все доступные отсчеты данных.
-
2) Разделение (окном T i ) пр о странственно отбеленных сенсорных данных { x ( k )} на L нена-кладывающихся блоков и оценка набора КМ R x ( Ti , pi ) (для i = 1,..., L ; I = 1,..., M ), т. е. для каждого интервала данных, вырезанного окном, вычисляется M различных КМ для x ( k ). (Часто достаточно использовать M = 1, L = 20 и 10-100 отсчетов в каждом блоке).
-
3) Определение ортогональной матрицы U для вех {R x ( Ti , pl )} , используя метод приближенной объединенной диагонализации (ПОД), который удовлетворяет условию U T R x (T i , p l ) U = D i l , где {D i , l } — набор диагональных матриц.
-
4) Вычисление смешивающей матрицы H = Q + U .
Сравнение алгоритмов
Модификация алгоритма ИСМ для нестационарных сигналов достаточно устойчива к белому шуму независимо от вида его распределения. В качестве меры качества функционирования (МКФ) алгоритма применяется показатель, определяемый соотношением
n -мерный s ( t ), которые связаны линейным преобразованием x ( k ) = H s ( k ) + e ( k ) (где H — неизвестная СМ размера ( m x n ) и е ( k ) — m -вектор шума), в общем случае коррелированны, т. е. R xs = = E{ xs T } ^ 0, но ошибка, или шум е, не коррелированна с s . Поэтому целесообразно найти матрицу H такую, чтобы новая пара векторов e = x – – H s и s стала некоррелированной друг с другом:
R e s = E{ es T } = E{( x - H s ) s T } = 0.
МКФ =--1--x
n ( n - 1)
n
n
Z z
-
k = i max
1 + z
g ki
-
k = i max
1 ^ , (27)
где gij — это элемент ( i , j ) общей матрицы системы, реализующей РСС: G = WH; max j gij — представляет максимальную величину среди элементов вектора i -й строки матрицы G; max j gji — максимальную величину среди элементов вектора i -го столбца матрицы G. Когда достигается РСС, МКФ становится близким к нулю (например, менее чем 0.01).
При большом значении отношения сигнал/шум (ОСШ) рассмотренные алгоритмы работают достаточно хорошо. Определенное различие алгоритмов по МКФ проявляется при низких значениях ОСШ: робастный алгоритм на основе СВП и объединенной диагонализации КМ превосходит алгоритм, использующий только СВП и приближенную объединенную диагонализацию (ПОД). Робастный алгоритм для нестационарных сигналов, основанный на ПОД, почти при всех значениях ОСШ превосходит другие алгоритмы. Однако для ОСШ ниже 6 дБ робастный алгоритм, использующий только ПОД, превосходит остальные.
Кросс-корреляционая матрица R es представляется иначе в виде
R e s = E{ xs T - H ss T } = R X s - HR ss .
Следовательно, оптимальная СМ, освобождающая от корреляции (уничтожающая корреляцию), выражается соотношением
Н оп ТИМ . = R xs R - s = E{ xs T } • ( E{ ss T } ) - 1 . (28)
Для условий пространственно окрашенного шума и независимости его от СИ оценка минимальной КМ ошибки (или сигнала шума) определяется соотношением
R ее = E{ ee T } = R xx - R xs R^R sx .
В случае, когда вектор шума пространственно белый, КМ имеет вид R ее = ст ^ I. При этом для относительно большого ОСШ для дисперсии шума ст 2 используется оценка
СТ 2 = (минимальному собственному значению КМ R xx )
или альтернативная оценка в виде
СТе2 = (среднему значению
младших СЗ матрицы R xx ).
ОСВОБОЖДЕНИЕ ОТ КОРРЕЛЯЦИИ
Реализация пространственной декорреляции, называемой также освобождением от корреляции, играет важную роль в области обработки сигналов.
Два вектора-сигнала — m -мерный x ( t ) и
Идентификация СМ на основе процедуры освобождения от корреляции
В задаче РСС неизвестными являются СМ H и СИ s . При решении этой задачи для получения необходимых оценок возможно использовать модифицированную функцию F ( H , s) и построенный на ее основе алгоритм для ИСМ [24]:
F ( H, s) = R е, = Б{ е § T }, (29)
где е ( k ) = x ( k ) - H s и x = [ xp x 2 , . , x m ] T ; s = [,?1, s2,...,s;m ]— фильтрованный вектор-сигнал сенсоров x ( k ) и оценка СИ s ( k ). Более точно сиг-
-
налы сенсоров и оценки сигналов источника являются фильтрованными с использованием фильтров с одинаковыми передаточными функциями
B (z)=Z L==1 bPz-1, т- е- j k)=Z L=1 b x1k - p ) si( k)=Z P=1 bPs^ k- p )
( j = 1,2,--., m );
( i = 1,2,---, n )-
Выбор фильтра B ( z ) зависит от статистических особенностей СИ и шума. Описанный подход пригоден, когда СИ окрашенные, т. е. они имеют вре-меннýю структуру. Из (29) получается соотношение для оценки смешивающей матрицы
^ ^ л 1
H = R x s R - 11 -
Для случая, когда число сенсоров больше, чем количество СИ (m > п) , СИ окрашенные и КМ R ee аддитивного и некоррелированного (с СИ) шума известна или для нее есть оценка, может быть использован робастный относительно шума алгоритм в следующей форме.
-
1) Произвольная инициализация смешивающей матрицы H и оценка СИ по соотношению
§< k ) = (м r - e H) - 1 H T R - e x ( k ), (31)
где Rˆ ee — оценка КМ шума.
-
2) Вычисление СМ Hˆ (на основе оценки СИ s ˆ( k ) в 1) по соотношению
/У /X A .
H = R x s R - 1 ,
где R i 5 = ( 1/ N ) £ N = 1 x ( k ) 5 T ( k ) и R ,, = ( 1/ N ) x x Z N is( k ) 5 T ( k )- k 1
-
3) Чередующееся повторение 1) и 2) до достижения сходимости.
Более сложный вариант алгоритма соответствует (нередко встречающемуся) случаю недостаточно определенной задачи, когда число сенсоров меньше количества СИ ( m < n ). Решение задачи основано на методе Рао и Креутца-Дельгано (Rao, Kreutz-Delgano) [25], который реализован в виде алгоритма. Последовательность процедур алгоритма дает итеративную оценку s ( k ) и H.15)
-
1) После инициализации (аналогичной предшествующему алгоритму) оценка сокращенного числа компонент СИ:
s i + 1 ( k ) = D s ( l ) H T ( H k D s ( l ) H T + a i I ) - 1 x ( k ),
V k , l = 1,2,---,
где D,|( l ) = Диаг - {| s i |J s 2 1 |,^J s ni I} ; s ji обозначает оценку s ˆ j ( k ) на j -й внутренней итерации и α l — подходяще выбранный параметр регуляризации [4].
-
2) Итеративная оценка смешивающей матрицы H:
H k + 1 = H k - n k [ H k R 55 - R x5 - y k H k ] , (34) где Y k = tr [i H T ( H k IR 5s - IR X 5 ) ] — коэффициент забывания, который в процессе итераций обеспечивает примерное постоянство нормы у матрицы H (а это предохраняет от получения тривиального решения H= 0).
-
3) Повторение с чередованием 1) и 2) до получения сходимости решения.
ЗАКЛЮЧЕНИЕ
Дана модель формирования смеси ненаблюдаемых сигналов и показаны основные подходы к задаче восстановления вида этих сигналов без априорной информации (или с минимальными ее элементами). Показаны основные подходы к формализации задачи разделения смеси сигналов, включая анализ независимых компонент, отделение сигнала от шума и оценку дисперсии шума по младшим собственным значениям ковариационной матрицы.
― Проанализированы несколько вариантов алгоритмов для решения задач идентификации смешивающей матрицы (ИСМ) и решения задачи разделения сигналов смеси (РСС). Алгоритмы отличаются сложностью и приспособлены к различным условиям и требованиям экспериментальных исследований по восстановлению вида сигналов, которые формируют на сенсорах информационноизмерительной или информационно-управляющей систем измерительную информацию:
-
• наличие или отсутствие шума, вид распределения его компонент, коррелированность компонент шума в каналах (наличие или отсутствие так называемой пространственной корреляции шума), наличие временнóй структуры компонент шума;
-
• наличие корреляции сигналов на сенсорах, которая дает возможность получать оценку ковариационных матриц, и наличие временнóй структуры этих сигналов на каждом отдельном сенсоре;
-
• стационарность или нестационарность сигналов источника;
-
• соотношение количества сигналов в смеси: соотношение размерности вектора-сигнала источника ( n ) и число сенсоров в ИИС ( m ), т. е. m > n , m = n или m < n .
― Алгоритмы РСС основаны на статистиках второго порядка (т. е. на дисперсии, корреляционных функциях, ковариационных и кросс- корреляционных матрицах).
― Рассмотрен обобщенный показатель, определяющий меру качества функционирования алгоритма ИСМ.
― Даны основные преобразования, связанные с получением алгоритмов ИСМ и РСС:
-
• преобразование отбеливания, обеспечивающее пространственную (межканальную) декорреляцию, и критерий оптимизации этой процедуры;
-
• адаптивная оценка матрицы (обратной к СМ), реализующей РСС, получение этой матрицы с помощью нейронной сети.
