Методы и средства поддержки принятия решений водителя автомобиля по ограничению скоростного режима

Автор: Варламова Светлана Александровна, Федосеева Кристина Александровна
Рубрика: Управление в социально-экономических системах
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
Данная работа посвящена распознаванию дорожных знаков. Актуальность этой задачи обусловлена вопросами безопасности дорожного движения. Развитие современных компьютерных технологий позволило многим автопроизводителям установить системы технического зрения в серийные автомобили. За последние несколько лет компьютерное зрение набрало огромную популярность. Одной из задач компьютерного зрения является распознавание образов. Однако основными проблемами таких систем является низкая точность обнаружения, -а также невозможность некоторых систем распознавать российские дорожные знаки. Представлено описание системы распознавания дорожных знаков RoadAR на базе Android как наиболее бюджетный и доступный вариант решения задачи. Выполнено тестирование системы RoadAR в ясную, пасмурную погоду и в темное время суток. В результате был сделан вывод, что большинство систем распознают дорожные знаки, ограничивающие скоростной режим, но не контролируют зону действия знака. В связи с этим необходимо разработать алгоритмы распознавания дорожных знаков, которые отменяют знак «Ограничение максимально допустимой скорости». В работе представлен общий алгоритм распознавания знаков, использующий фильтр Гаусса, бинаризацию, поиск геометрических фигур и сравнение с эталоном. Кроме того, представлен алгоритм распознавания знака «Начало населенного пункта», основанный на алгоритме Кэнни, сегментации и распознавании символов на знаке. Информация о распознанных знаках будет далее использоваться в системе поддержки принятия решений водителя. Алгоритм поддержки принятия решений водителя базируется на правилах дорожного движения, распознанных знаках и данных скорости автомобиля.
Распознавание, дорожный знак, сегментация, дорожное движение, поддержка принятия решений
Короткий адрес: https://sciup.org/147232222
IDR: 147232222 | УДК: 004.93 | DOI: 10.14529/ctcr180407
Methods and means of car driver decision support for speed limitation
This article is about road signs determination. The urgency of this task is determined by the issues of road safety. The development of modern computer technology has allowed many car manufacturers to establish vision systems in production cars. Over the past few years, computer vision has gained immense popularity. One of the tasks of computer vision is image recognition. However, the main problems of such systems are low detection accuracy, as well as the inability of some systems to recognize Russian traffic signs. The description of the road signs recognition system RoadAR based on Android is presented, as the most budgetary and affordable solution of the problem. The RoadAR system was tested in clear, cloudy weather and at night. As a result it was concluded that most systems recognizes limiting speed road signs, but do not control the zone of the sign. In this regard, it is necessary to develop algorithms for recognizing road signs that cancels the sign “Limitation of the maximum permissible speed”. The paper presents a general algorithm for character recognition using a Gaussian filter, binarization, the search for geometric shapes, and comparison with a standard. In addition, algorithms for recognizing the sign “The Beginning of the Settlement”, based on the Canni algorithm, segmentation and character recognition on the sign, is presented. The information on the recognized signs will be further used in the driver’s decision support system. The driver decision support algorithm is based on traffic rules, recognized signs and vehicle speed data.
Текст научной статьи Методы и средства поддержки принятия решений водителя автомобиля по ограничению скоростного режима
С каждым годом количество автомобилей на дорогах увеличивается. К сожалению, не все водители соблюдают правила дорожного движения (ПДД), в результате возрастает количество дорожно-транспортных происшествий (ДТП). Одной из причин нарушения ПДД является превышение скорости. Скоростной режим нарушается по нескольким причинам, одной из которых является невнимательность. Ситуация на дорогах такова, что периодически приходится предугадывать действия других водителей, и больше обращать внимание на транспортные средства. В результате можно не заметить какие-либо дорожные знаки. Кроме того, дорожные знаки иногда находятся очень высоко или, наоборот низко, какие-то знаки перекрываются другими объектами, например, опорами освещения, что также затрудняет их прочтение. Поэтому вопрос обнаружения и распознавания знаков дорожного движения является достаточно актуальной задачей.
В последние несколько лет задача обнаружения дорожных знаков решалась многими учеными в разных странах [1–3].
На сегодняшний день разработкой систем распознавания дорожных знаков занимаются многие крупные зарубежные производители автомобилей. Большинство из данных систем являются системами контроля скорости, которые созданы для обеспечения безопасности дорожного дви-
Варламова С.А., Федосеева К.А.
жения. Однако данные системы способны распознавать только ограниченный набор знаков и, как правило, привязаны к конкретной марке автомобиля.
Независимо от производителя, все системы распознавания дорожных знаков состоят из видеокамеры, электронного блока управления, средства вывода информации и устройства подачи звукового оповещения водителю.
Работа любой из систем происходит по следующему принципу:
-
• Видеокамера фиксирует все дорожные знаки в зоне их расположения, справа и сверху по ходу движения, и после передает их изображение в электронный блок управления.
-
• После того как электронный блок управления принял изображения от видеокамеры, он выполняет:
-
а) распознавание формы и размеров дорожного знака;
-
б) распознавание цвета контура знака и фона;
-
в) распознавание текстовых и цифровых надписей, например, величина скорости;
-
г) анализ фактической скорости автомобиля;
-
д) сравнение скорости автомобиля с максимально допустимой скоростью.
-
• После этого на устройство вывода информации при необходимости выводится визуальное и звуковое предупреждение в случае несоблюдения водителем правил дорожного движения [4–7].
Помимо встроенных систем распознавания дорожных знаков в автомобилях, существует мобильное приложение RoadAR на базе Android . Приложение RoadAR включает в себя функции видеорегистрации, распознавания дорожных знаков, предупреждения водителя о зоне их действия [8]. Алгоритм работы RoadAR следующий. Устройство на платформе Android закрепляется на стекло, камерой по ходу движения. Распознанные на устройстве знаки система сохраняет на сервере в общую базу, откуда потом они попадают к другим водителям, кроме всего прочего это позволяет в следующий раз заранее предупредить водителя о наличии знака, даже если он закрыт, к примеру, автобусом. После распознавания знака устройство с помощью GPS -модуля сравнивает текущую скорость движения со скоростью, ограниченной знаком, и в случае нарушения выдает оповещение.
Приложение RoadAR остается работоспособным и без работающего Интернета: если выключить GPS -модуль, устройство все равно будет распознавать знаки через камеру, но не сможет понять их местоположение и сравнить с текущей скоростью движения. Если же GPS -модуль включен, то приложение может уведомлять о нарушении ПДД звуковым сигналом, знаком во весь экран и суммой грозящего штрафа.
Многочисленные исследования показали, что точность систем распознавания знаков зависит от множества факторов: погодных условий, времени суток, погодных условий и т. д. Точность систем распознавания дорожных знаков, встроенных в автомобиль, оценивалась в [9]. Исследования показали, что точность распознавания этих систем завышена, фактически она составляет 70–85 %. Кроме того, часть таких систем не распознают российские дорожные знаки. Интерес представляет оценка системы RoadAR . Тестирование было выполнено в ясную погоду, в пасмурную погоду и в темное время суток, результаты экспериментов представлены в таблице.
Результаты натурных экспериментов с системой RoadAR
|
Погодные условия |
Детектировано (точность локализации) |
Не детектировано |
Ложное детектирование |
|
Ясная погода |
29 (82,9 %) |
6 |
7 |
|
Пасмурная погода |
14 (87,5 %) |
2 |
4 |
|
Ночное время суток |
21 (72,7 %) |
9 |
9 |
Точность локализации рассчитывалась по следующей формуле:
Количество детектированных знаков
Точность локализации = .
Общее число знаков
В пасмурную погоду приложение распознало больше знаков, чем в ясную. Наихудший результат по точности распознавания (73 %) дал эксперимент в ночное время суток. Ложных срабатываний системой в ясную также оказалось больше, чем в пасмурную.
Управление в социально-экономических системах
В результате тестирования и изучения систем распознавания дорожных знаков было выявлено, что большинство систем распознает дорожные знаки, ограничивающие скоростной режим, но не контролируют зону действия дорожного знака.
Исходя из этого было принято решение разработать алгоритмы распознавания дорожных знаков, которые отменяют знак «Ограничение максимально допустимой скорости». Например, к ним относятся «Автомагистраль», «Начало населенного пункта», «Конец населенного пункта», «Конец зоны ограничение максимальной скорости», «Конец зоны всех ограничений» и другие.
Общий алгоритм распознавания знаков представлен на рис. 1. Программная система считывает последовательность кадров с камеры, преобразует их в цветовую модель HSV [10] и устраняет шумы c помощью фильтра размытия по Гауссу [11]. После этого система выделяет предполагаемый знак, вырезая верхнюю правую часть кадра, и производит бинаризацию [12]. По выделенной области предполагаемого дорожного знака система распознает его путем поиска геометрических фигур, которыми могут быть дорожные знаки, и отбирает полученные области по существенным признакам (цвет, размер). После этого происходит распознавание внутренней области предполагаемого знака с помощью сравнения с эталоном. Для распознавания внутренней области система обращается к базе данных.
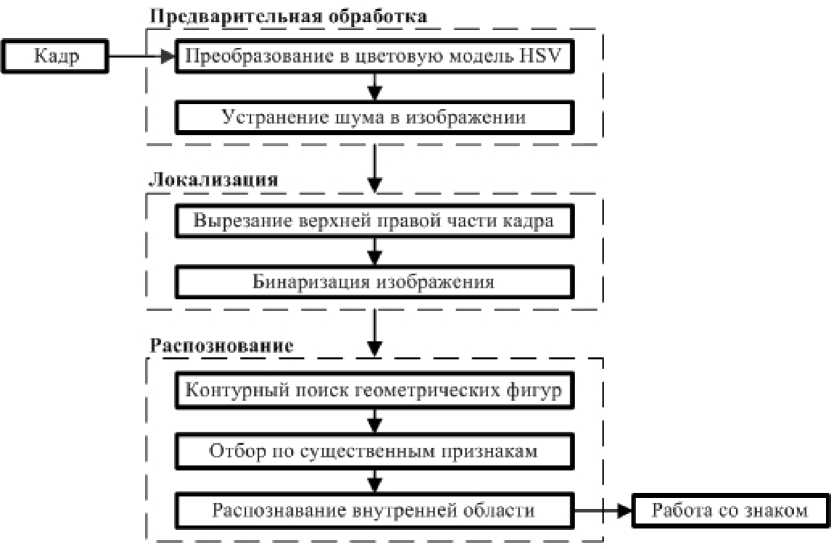
Рис. 1. Работа системы с полученным кадром
Внешний вид знаков, отменяющих знак «Ограничение максимально допустимой скорости», сильно отличается друг от друга, поэтому блок «Работа со знаком» для каждого знака будет свой.
На рис. 2 представлен алгоритм распознавания знака «Начало населенного пункта» в виде черного текста на белом фоне.
Первым этапом является нахождение контура прямоугольника при помощи алгоритма Кэнни [13, 14]. Затем производится отбор найденных областей, где высота равна 350 мм, ширина – 1050 мм, 450 мм или 1350 мм. Данные размеры соответствуют ГОСТ Р 52290-2004 [15]. Отбор полученных областей по белому фону необходим, так как согласно пункту 1.2 ПДД [16] «Начало населенного пункта» кроме знака черного текста на белом фоне может обозначаться знаком с белым текстом на синем фоне, но на дороге, обозначенной данным знаком, не действуют ограничения скорости, установленные ПДД для движения в населенном пункте.
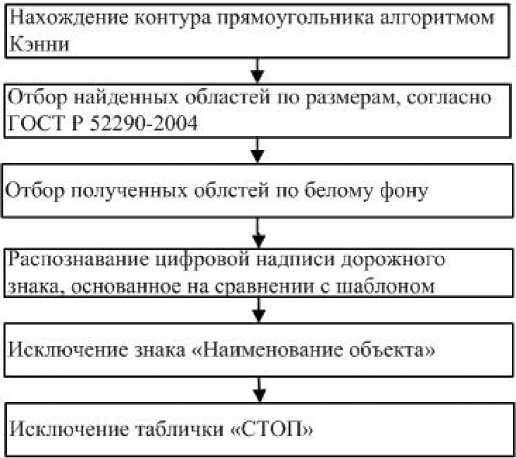
Рис. 2. Алгоритм распознавания знака «Начало населенного пункта»
Распознавание цифровой надписи дорожного знака, основанное на сравнении с эталоном
База эталонов состоит из изображений русского алфавита, цифр и знаков препинания: A…Я, а…я, 0…9, точка, тире согласно ГОСТ Р 52290–2004. Для распознавания символов на знаке необходимо:
-
а) выполнить сегментацию изображения на отдельные символы. Для этого необходимо посчитать количество черных пикселов в каждой вертикали; в тех вертикалях, где сумма равна нулю, есть разрыв между символами;
-
б) получить крайние значения первого элемента: положение слева, справа, сверху, снизу;
-
в) найти левую точку. В цикле проверить вертикали, если найден черный пиксель, то это первая левая точка;
-
г) найти правую точку. В цикле проверить суммы черных пикселов в вертикалях; если сумма по вертикали равна нулю, то достигнут конец элемента;
-
д) аналогично пунктам в, г найти верхнюю и нижнюю точки;
-
е) для нахождения следующих элементов точкой поиска является правая точка предыдущего элемента;
-
ж) каждый полученный элемент сравнить с каждым изображением из базы эталонов. Сравнение двух изображений заключается в подсчете совпадающих черных точек;
-
з) искомый эталон должен дать близкое к 100 % совпадение черных пикселей.
Знаки «Наименование объекта» и таблички «СТОП» необходимо исключать из найденных областей, поскольку по внешним признакам они близки к знакам «Начало населенного пункта». Для исключения знака «Наименование объекта» распознанные символы необходимо сравнить со специально подготовленным списком, состоящим из слов, которые могут встретиться на данном знаке. Такими словами могут быть: улица, переулок, река, район и т. п. А так как ГОСТ Р 52290– 2004 [15] допускает сокращать на знаках русские и английские слова, то в списке исключений должны содержаться и сокращения данных слов. Для того чтобы исключить табличку «СТОП» необходимо отбросить найденные знаки, в которых последовательность символов образует слово «стоп».
Однако распознавание знаков – это только часть задачи. Информация о распознанных знаках будет далее использоваться в системе поддержки принятия решений водителя [17, 18].
В первую очередь производится поиск знака «Ограничение максимальной скорости», зона действия которого, согласно ПДД, может быть ограничена путем его установки в сочетании с табличкой «Зона действия». В этом случае после проезда обозначенной на табличке дистанции ограничение максимальной скорости отменяется. Исходя из этого, если знак «Ограничение мак-
Управление в социально-экономических системах симальной скорости» системой был найден, то далее необходимо определить наличие таблички «Зона действия», на которую распространяется найденный знак.
-
1. Если табличка «Зона действия» найдена, то на указанную на табличке протяженность запоминается скорость, указанная на знаке «Ограничение максимальной скорости». Если расстояние, указанное на табличке, не пройдено автомобилем, то максимально допустимая скорость сравнивается с фактической скоростью автомобиля.
-
2. Если таблица «Зона действия» не найдена, то согласно ПДД [16] для завершения зоны действия знака существует ряд ситуаций. Зона действия знака «Ограничение максимальной скорости» распространяется: до такого же знака с другим значением скорости; до знака «Начало населенного пункта» с белым фоном; до знака «Конец зоны ограничения максимальной скорости»; до знака «Конец зоны всех ограничений»; от места установки до ближайшего перекрестка, а в населенном пункте при отсутствии перекрестка – до знака «Конца населенного пункта».
Исходя из этого, скорость, указанная на знаке, сравнивается с фактической до тех пор, пока не будет найден один из вышеперечисленных знаков, или пока система не определит, что на проезжей части имеется перекресток. Признаками перекрестка являются:
-
а) светофоры;
-
б) дорожный знак «Круговое движение»;
-
в) дорожные знаки «Примыкание второстепенной дороги», которые устанавливаются только перед перекрестками;
-
г) табличка «Направление главной дороги»;
-
д) предупреждающие знаки «Пересечение с второстепенной дорогой», «Примыкание второстепенной дороги» и «Пересечение равнозначных дорог»;
-
е) знаки приоритета «Главная дорога» и «Уступите дорогу»;
-
ж) знак «Конец главной дороги».
Если в выделенном участке знак ограничения скорости не найден, то тогда определяется, является ли найденный знак началом населённого пункта, после которого максимально допустимая скорость не должна превышать 60 км/ч, согласно ПДД [16]. Если системой был найден знак «Конец населенного пункта», то фактическая скорость автомобиля должна быть не больше 90 км/ч. Если был найден знак «Автомагистраль», то разрешается движение со скоростью не более 110 км/ч. Если фактическая скорость автомобиля превышает максимально допустимую, то водителю выдается звуковое оповещение.
Для измерения фактической скорости все существующие системы распознавания дорожных знаков используют GPS , однако у GPS есть свои недостатки [19]. Во-первых, постоянная связь приложения с GPS очень сильно разряжает батарею – до 20 % за час работы. Во-вторых, время на инициализацию занимает от 10 секунд до нескольких минут. В-третьих, при определенных условиях сигнал может не доходить либо приходить, но со значительными задержками или искажениями. Большая облачность и плотная листва деревьев также могут ухудшать прием сигнала со спутников. Кроме этого, сигнал GPS могут также исказить помехи, возникающие в результате магнитных бурь, или помехи от наземных источников радиосигнала. Исходя из этого, для измерения фактической скорости автомобиля было принято использовать сканер, предназначенный для диагностики автомобиля ODBII , который считывает данные с электронного блока управления в автомобиле. Данный сканер может считывать порядка 150 датчиков, среди которых температура охлаждающей жидкости, число оборотов двигателя, уровень топлива, а также скорость и пройденное расстояние.
В результате работы выполнен анализ существующих средств распознавания дорожных знаков. Сделан вывод, что существующие системы не контролируют зону действия знака «Ограничение максимально допустимой скорости». Для решения этой проблемы предложен общий алгоритм распознавания знаков и разработаны 12 алгоритмов для распознавания знаков, которые отменяют знак «Ограничение максимально допустимой скорости». А также предложен алгоритм поддержки принятия решений водителя. Реализация предложенных алгоритмов возможна с помощью библиотеки компьютерного зрения OpenCV и сканера ODBII .
Варламова С.А., Федосеева К.А.
Список литературы Методы и средства поддержки принятия решений водителя автомобиля по ограничению скоростного режима
- Shneier, M. Road sign detection and recognition / M. Shneier // Proc. IEEE Computer Society Int. Conf. on Computer Vision and Pattern Recognition. - 2005. - P. 215-222.
- A New Approach for In-Vehicle Camera Traffic Sign Detection and Recognition / A. Ruta, F. Porikli, Y. Li et al. // IAPR Conference on Machine Vision Applications (MVA), Session 15: Machine Vision for Transportation. - 2005.
- Road Sign Detection in Images / R. Belaroussi, P. Foucher, J.P. Tarel et al. // A Case Study, 20th International Conference on Pattern Recognition (ICPR). - 2010. - P. 484-488.
- Система распознавания дорожных знаков. - http://systemsauto.ru/active/traffic_sign_ recognition.html.
- Система распознавания дорожных знаков: как она работает?. - http://www.slav-avto.ru/ posts/678/.
- Назначение и применение системы распознавания дорожных знаков. - http://carextra.ru/ obzory/sistema-raspoznavaniya-dorozhnyih-znakov.html.
- Moving objects control under uncertainty / I.S. Kobersy, D.V. Shkurkin, A.V. Zatonskiy et al. // ARPN Journal of Engineering and Applied Sciences. - 2016. - Vol. 11, no. 5. - P. 2830-2834.
- RoadAR антирадар и регистратор для Android. - http://freesoft.ru/roadar_umnyy_ videoregistrator.
- Проверяем системы распознавания знаков в деле. - https://www.zr.ru/content/articles/ 444117-proverajem_sistemy_raspoznavanija_znakov_v_dele/.
- Прикладное использование M2M-технологий: разработка iOS-приложений для распознавания дорожных знаков. - http://www.azoft.ru/blog/ios-prilozhenie-dlja-raspoznavanija-dorozhnyh-znakov/.
- Гонсалес, Р. Цифровая обработка изображений / Р. Гонсалес, Р. Вудс. - М.: Техносфера, 2005. - 1072 c.
- Затонский, А.В. Использование бликовых отражений для автоматического распознавания параметров пены при флотации калийных руд / А.В. Затонский, С.А. Варламова // Обогащение руд. - 2016. - № 2 (362). - С. 49-56.
- Оператор Кэнни. - https://ru.wikipedia.org/wiki/Оператор_Кэнни.
- Детектор границ Канни. - https://habrahabr.ru/post/114589/.
- ГОСТ Р 52290-2004. Технические средства организации дорожного движения. Знаки дорожные. Общие технические требования. - http://www.nppskmost.ru/files/GOST_P_52290_2004_1.pdf.
- ПДД 2018 РФ с изменениями от 18 марта 2018 года. Раздел 10. Скорость движения. - http://www.pdd24.com/pdd/pdd10.
- Mathematical and software of the distributed computing system work planning on the multiagent approach basis / S.A. Oleinikova, O.Ya. Kravets, E.B. Zolotukhina et al. // International Journal of Applied Engineering Research. - 2016. - Vol. 11, no. 4. - P. 2872-2878.
- Zatonsky, A.V. Balance model of conversation of passengers flows in residental part of city / A.V. Zatonsky // World Applied Sciences Journal. - 2014. - Vol. 30, no. 12. - P. 1772-1775.
- Затонский, А.В. Имитационная балансовая модель остановки городского общественного транспорта / А.В. Затонский, Ю.И. Володина // Грузовое и пассажирское автохозяйство. - 2013. - № 12. - С. 70-77.
