Методы выявления ложных сигналов и искусственных радионавигационных полей

Автор: Веркин С. С.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 6-1 (105), 2025 года.
Бесплатный доступ
В работе был проведен всесторонний анализ проблемы несанкционированного ввода ложных сигналов и искусственных радионавигационных полей в спутниковые радионавигационные системы, функционирующие в условиях информационного воздействия. В процессе работы были разработаны и обоснованы инновационные методы их выявления, основанные на комплексном анализе параметров широкополосных сигналов и помеховых воздействий в частотно-временной области линейного пространства Гильберта. Особое внимание уделялось алгоритмам прогнозирования данных альманаха и мониторингу целостности навигационного поля, что позволило существенно повысить надежность и устойчивость функционирования навигационных систем к внешним дестабилизирующим факторам.
Ложные сигналы, искусственные радионавигационные поля, спутниковая радионавигация, информационное влияние
Короткий адрес: https://sciup.org/170210612
IDR: 170210612 | DOI: 10.24412/2500-1000-2025-6-1-271-277
Methods of detecting false signals and artificial radionavigation fields
The work carried out a comprehensive analysis of the problem of unauthorized input of false signals and artificial radio navigation fields into satellite radio navigation systems operating under information impact conditions. In the course of the work, innovative methods for their detection were developed and substantiated, based on a comprehensive analysis of the parameters of broadband signals and interference effects in the frequency-time region of the linear Hilbert space. Particular attention was paid to the algorithms for forecasting almanac data and monitoring the integrity of the navigation field, which made it possible to significantly increase the reliability and stability of the functioning of navigation systems to external destabilizing factors.
Текст научной статьи Методы выявления ложных сигналов и искусственных радионавигационных полей
В современных системах управления специального назначения средства и комплексы навигационного обеспечения интегрированы в информационный контур управления, образуя синергетическую связку с глобальной спутниковой связью. Эта интеграция вносит неоценимый вклад в системы управления войсками и оружием, многократно повышая их боевой потенциал и оперативную эффективность [1].
Интеграция навигационной информации в контур управления представляет собой критически важный, но одновременно и чрезвычайно ответственный фактор. Она требует от навигационных систем высокой степени надежности и достоверности предоставляемых данных. Однако радиолинии спутниковых радионавигационных систем (СРНС) характеризуются высокой уязвимостью к организованным информационным воздействиям, что может существенно снизить эффективность навигационного обеспечения и, как следствие, общую функциональность систем управления. Данный факт подтверждается на примере локальных вооруженных конфликтов. В связи с этим, исследование методов обнаружения ложных радионавигационных сигналов приобретает особую актуальность и значимость.
Информационное влияние на аппаратуру спутниковой навигации
Информационное воздействие на аппаратуру спутниковой навигации (АСН) пользователя представляет собой комплекс мероприятий, направленных на искажение, уничтожение или подмену радионавигационной информации, а также на создание искусственных радионавигационных полей. Эти действия осуществляются с целью нарушения функционирования навигационных систем, что может привести к значительным негативным последствиям для пользователей.
Средства информационного воздействия стремятся минимизировать затраты мощности передатчика помех при сохранении максимальной эффективности воздействия. Оптимальная помеха определяется как сигналоподобная помеха, структура которой максимально приближена к структуре радионавигационного сигнала. Это позволяет существенно повысить вероятность успешного воздействия на навигационные системы [1-3].
В условиях низкого уровня радионавигационного сигнала на входе приёмников АСН, создаваемые помехи могут оказывать значительное влияние на работу навигационных систем. Особенности информационного воздействия на АСН включают использование подсистем мониторинга, формирования и постановки оптимальных помех приведены на рисунке 1. Воздействие осуществляется, как правило, с помощью летательных аппаратов, охватывающих все радионавигационные линии, находящиеся в зоне подавления.
Таким образом, информационное воздействие на АСН представляет собой сложный и многогранный процесс, требующий высокой степени подготовки и профессионализма ис- полнителей. Эффективность данного воздействия зависит от множества факторов, включая энергетические соотношения сиг-нал/помеха, структуру помехи и особенности функционирования навигационных систем.
Средства информационного воздействия
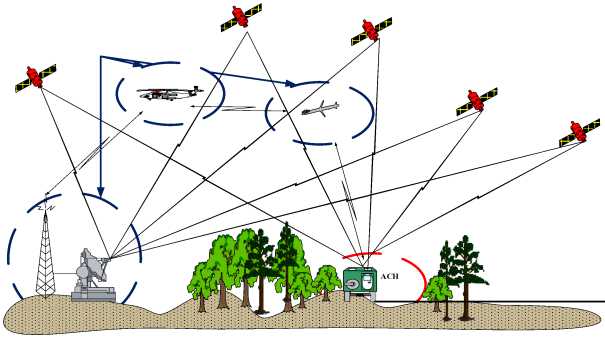
Рис. 1. Особенности информационного воздействия на аппаратуру спутниковой навигации
В качестве оптимальной помехи в работе рассматривается имитационная, так как по структуре она приближается к оптимальной. Имитационные помехи могут использоваться как ложные сигналы, а также для перегрузки каналов первичной обработки информации (блока поиска и захвата сигналов, следящие системы за параметрами навигационных сигналов) с целью нарушения функционирования навигационного приёмника. Оптимальная помеха должна формироваться процессом, сходным с навигационным сигналом (генераторным или ретрансляционным способом).
Методы выявления ложных радионавигационных сигналов и искусственных радионавигационных полей
Для защиты АСН от имитационных помех вначале необходимо их обнаружить. В работе предложено три способа обнаружения имита- ционных сигналов, основанных на измерении параметров сигналоподобных помех в частотно-временной области линейного пространства Гильберта, на использовании данных альманаха и алгоритмов прогнозирования движения навигационных космических аппаратов (НКА), а также на контроле целостно- сти радионавигационного поля.
Различимость структур радионавигацион- ных сигналов и имитационных помех в ча- стотно-временной области может быть опре- делена в линейном пространстве Гильбер- та [1, 4]. В пространстве Гильберта радиона- s (t)
вигационный сигнал
длительностью Т
можно представить в комплексной форме.
∞∞
s(t) = X[ak cos(®kt) + bk sin(®kt)] + j Xak sin(®kt) - bkcos(rokt)] k=0 k=0
s ( t ) s'(t )
В общем виде выражение (1) можно записать
s (t ) = s (t ) + js'(t )
где s '( t ) - сигнал, сопряженный по Гильберту с сигналом s ( t ); ® k = к to o = 2 п k / T - частотные составляющие спектра сигнала;
2 T 2 T ak = - \ s(t)cos(®kt)dt b = - I s(t)sin(^kt)dt
T 0 ; T 0
- коэффициенты преобразования.
Сигнал, определенный в виде (1) и (2), где вещественная и мнимая части сопряжены по Гильберту, называется аналитическим. Мнимая часть отличается от вещественного фазового сдвига на п/2. Поэтому процедуру вычисления взаимосвязи параметров сигналов и помех можно проводить на основе преобразования по Гильберту. Количественная оценка величины взаимосвязи в частотно-временной области может осуществляться с помощью коэффициента взаимного различия (КВР) [1, 4]:
^ qi = L 0 1
j s rq ( t ) x п qi( t ) dt
j s rq ( t ) x п qi ( t ) dt ’
0 J
где s rq ( t ) - радионавигационный сигнал r -й структуры в радиолинии и принятый на q -ой частоте (канале) АСН, r е {1,2,., R }, R - общее количество используемых структур сигналов, q е {1,2,., Q }, Q - общее число каналов, используемых для приема сигнала, то есть s rq ( t ) - это функция, определяющая структуру передаваемого варианта сигнала в канале;
x п qi ( t ) - некоторая детерминированная функция, характеризующая форму (структуру) I -й помехи на длительности Т элемента полезного сигнала в q -м канале приема, i е {1,2,..., N }, N - общее количество вариантов (структур) сосредоточенных помех, действующее на входе приемника;
x п qi ( t ) - функция (помеха), сопряженная с x п qi ( t ) по Гильберту;
L о - некоторая постоянная, не зависящая от структуры используемых сигналов и воздействующих помех, определяемая из условий нормирования КВР и удобства расчетов.
Таким образом, КВР безразмерная величина, которая определяет относительное перекрытие в частотно-временной области сигналов и помех. Чем меньше этот параметр, тем меньше взаимное влияние структур s rq ( t ) и X п qi ( t ).
Значение КВР q 2 rqi определяется огибающей двумерной функцией сигналов при А t rqi ^ 0 и А F rqi ^ 0 на длительности сигнала Т . Влияние каждого из этих параметров можно установить, как сечение по одномерной функции. В общем случае КВР для имитационной помех определяется при условии А t rqi ^ 0 и А F rqi ^ 0 для каждого конкретного типа сигналов и помех. Поэтому их можно рассматривать как независимые события.
Временное сечение одномерной функции имеет вид: А t rqi ^ 0, А F rqi = 0. Характер изменения нормированной функции q 2o rqi в зависимости от относительной временной (фазовой) расстройки f o А t rq при - Т/2 < A t rqi < Т /2 и фиксированной базе сигнала показан на рисунке 2.
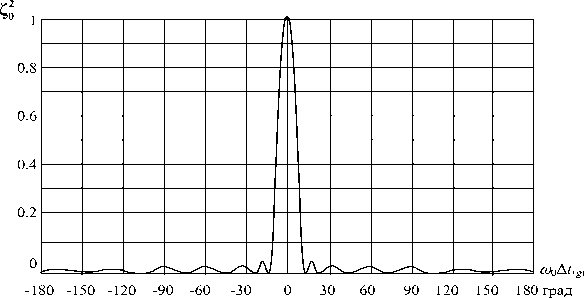
Рис. 2. Одномерная функция КВР во временной области
Влияние сдвига частот сигнала и помехи Д f rqi на g 2 rqi или g 2o rqi наиболее просто можно установить по второму сечению Д t rqi = 0, Д F rqi + 0 двухмерной функции. Характер изменения четной, непериодической функции g 2o rqi от Д F rqi при | Д F rqi | < 2 п / T показан на рис. 3. Для значений | Д F rqi | < 1/ T имеет область сильной взаимосвязи структур сигнала и помехи. Также наблюдаются нули при \ Д F rqi | = k / T и побочные максимумы при | Д F rqi | = ( к +0,5)/ T.
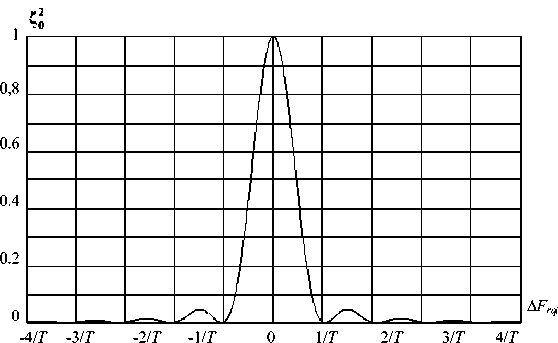
Рис. 3. Одномерная функция коэффициента взаимного различия в частотной области
Анализ параметров радионавигационных линии и линий радиоподавления показывает, что частотная расстройка сигнала и помехи является очень малой величиной и поэтому КВР в частотной области стремится к 1. Временная задержка ретрансляционной помехи значительна, что снижает величину КВР.
В данном случае, термин «взаимное различие» сигналов и помех не имеет статистического смысла, а определяется в процессе приема. Поэтому КВР более содержателен, поскольку охватывает как случаи, когда сигнал и помеха различны по своей структуре, так и случаи, когда помеха является некоторой копией полезного сигнала (имитационная помеха), отличающейся от сигнала, например, задержкой во времени Δ t, значением средней частоты Д F и т. д.
Искусственное радионавигационное поле обнаруживается путем фиксирования имитационных помех в трех и более каналах прие- ма, а АСН сигнализирует об этом пользователя световым и звуковым сигналом.
Способ обнаружения ложных радионавигационных сигналов на основе использования данных альманаха и алгоритмов прогнозирования движения НКА предполагает расчет времени моментов входа и выхода радионавигационных сигналов в шаровой сектор видимости НКА. Если НКА не входит в зону видимости, то принимается решение о воздействии или навязывании ложного радионавигационного сигнала. АПН принимает решение о ложном сигнале, который не используется в определении координат (частотный канал выключается).
Выделим задачи предлагаемого метода.
-
1. Для заданной зоны ввести геометрические характеристики топологии местности расположения АСН и произвести расчет угла маски:
Р м (а)
-
2. Провести имитационное моделирование движения НКА на интересующем периоде времени T и в заданном районе с помощью данных альманаха и специализированный программы для прогнозирования движения НКА в [1].
-
3. Вычислить для каждого НКА угол видимости Р {НКА( n (t))};
-
4. Сравнить расчетные и реальные параметры углов маски и углов видимости и принять решение о ложном источнике радионавигационного сигнала.
где H л – высота леса; R л – расстояние от АСН до края леса; α – угол наблюдения НКА. Угол маски характеризует степень влияния препятствий и рельефа.
Таким образом, данный метод позволяет обнаружить ложные радионавигационные сигналы с помощью расчета угла маски, алгоритмов прогнозирования движения НКА и данных альманаха. Для защиты от воздействия ложного источника необходимо сформировать «0» диаграммы направленности приемной цифровой антенной решетки (ЦАР) в направление предполагаемого источника.
Для идентификации имитационных помех можно использовать процедуры контроля целостности навигационного поля, позволяющие зафиксировать ситуации, когда радиосигналам СРНС нельзя доверять. Надежным методом контроля целостности СРНС является пеленгационный метод, основанный на анализе направлений на источники навигационных сигналов, получаемых путем пеленгации с использованием, например, ЦАР. Существующие алгоритмы принятия решения предполагают использование для каждой наблюдаемой группировки НКА своего оптимального по критерию Неймана-Пирсона порога принятия решения. Реализация таких алгоритмов связана с большими вычислительными затратами. Поэтому экономичнее применять алгоритм принятия решения на основе arctg —л • sin а IR.
фиксированного порога, не зависящего от вида наблюдаемой группировки НКА.
Пеленгация может производиться, например, интерферометрическим методом, основанном на измерении разностей фаз сигналов от НКА, принятых на разнесенные в пространстве элементы ЦАР. В этом случае в качестве дополнительных измеряемых параметров рассматриваются оценки пеленгационных параметров НКА - азимут ц изм и угол места в изм , которые сравниваются с пеленгационными параметрами ц расч и в расч рассчитанными на основе эфемероидных данных. В случае, когда по тем или иным причинам знание о взаимном положение НКА и АСН является неверным, т. е. при нарушении целостности навигационного поля, полученные при расчете пеленгационные параметры ц расч и в расч значительно отличаются от измеренных ц изм и в изм .
Для решения навигационной задачи необходимо обрабатывать сигналы как минимум от четырех НКА. В реальных условиях количество радионавигационных сигналов определяется количеством видимых НКА в зоне расположения АСН ( М – навигационных сигналов).
Для решения навигационной задачи и принятия решения о наличии или отсутствии целостности навигационного поля анализируются M - мерные выборки расчетных ц расч’ , в расч’ ( j = 1,…, M ) значений углов азимута и угла места для всех M -НКА и измеряемых ц изм’ , в изм’ значений тех же углов.
Когда нарушение целостности навигационного поля отсутствует (справедлива нулевая гипотеза H 0 ), оценки ( x 0 , y 0 , z 0 ) координат АСН близки к своим истинным значениям ( x и , у и , z и ), а расчетные ц расч\ в расч’ пелегационные параметры близки к измеренным ц изм’ , в изм’ , т.е. их математические ожидания совпадают:
ml {Ирасч(j)} = ml {Иизм^} = И0(j) ml {врасч(j)} = ml {iVj)} = ^jj где poj, Poj - истинные значения пеленгационных параметров j-го НКА относительно точки истинного положения.
При этом математические ожидания m1 {Низм(''}, ml {визм(j'} и ml {иизм(i'} ml Км(i'}
-
1 ', i, j = 1,..., M , i * j по различным
НКА значительно отличаются между собой.
В случае нарушения целостности навигационного поля (справедлива гипотеза H 1 ) значения математических ожиданий расчетных и измеряемых пеленгационных параметров для каждого НКА отличаются:
m i { и р,счп } = и 2ij * h1'1 = m i { и J j '}
Ш (в ( j '1 = B( j '/B( j ' = т!в ( j '1 m l {врасч } e2 * e1 m l {визм }
При этом значения математических ожиданий измеряемых пеленгационных параметров не зависят от номера НКА и равны одним и тем же значениям:
m l { И изм( ' ' } = m l { И изм( i ' } = M m l { визм( ' ' } = m l { lU i ' } = в1 ( i , j = 1,..., M '
где Р1и pi - пеленгационные параметры источника помех относительно точки истинного ml {ирасч®} ml {iW} положения АСН, а и яв ляются истинными значениями пеленгационных параметров j-го НКА относительно точки, координаты который были получены в ходе решения навигационной задачи в условиях нарушения целостности навигационного поля.
Таким образом, используя данный способ можно обнаружить ложные радионавигационные поля. Данный способ позволяет определить ложное радионавигационное поле, когда источник имитирует сигналы всех видимых НКА, что является преимуществом по сравнению свыше представленными методами.
Заключение
Проведенные исследования представляют собой ключевой компонент обеспечения навигационной безопасности систем управления войсками и оружием. Результаты данной работы обладают высокой практической значимостью для проведения радиомониторинга ложных сигналов и полей в пунктах контроля радионавигационного поля и автоматизированных систем навигации (АСН). Эти данные могут быть эффективно интегрированы в процесс проектирования радионавигационных систем и их компонентов, способствуя повышению их функциональной надежности и устойчивости к внешним воздействиям.
Перспективным направлением дальнейших исследований является детальная оценка погрешностей, связанных с обнаружением имитационных помех, а также анализ их влияния на эффективность функционирования навигационных систем. Это позволит разработать более точные и адаптивные алгоритмы для обнаружения и подавления ложных сигналов, что является критически важным для обеспечения бесперебойной работы систем управления в условиях сложной радиоэлектронной обстановки.
