Модель отклонения медицинской иглы при движении в тканях человека

Автор: Дружинин В.Г., Морозов В.А., Никитин С.А., Харламов В.В.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 4 (82) т.22, 2018 года.
Бесплатный доступ
Представлена математическая модель, описывающая отклонение медицинской стальной инъекционной иглы при ее движении в фантоме мягких тканей (имитация тканей человека). Данная модель необходима для обеспечения корректировки роботы роботизированной системы при проведении операций брахитерапии или схожих операций, где требуется высокоточное позиционирование кончика иглы. Поскольку кончик иглы является асимметричным, то при движении в тканях игла будет деформироваться, что приведет к ее отклонению от прямолинейного движения. Таким образом, внедряя и поворачивая иглу вокруг своей оси, можно провести кончик иглы по заданной траектории. Разрабатываемая модель необходима для корректировки движения иглы в тканях человека или для прогнозирования оптимальных мест прокола. В работе рассмотрена общая постановка задачи и решена одна из подзадач, а именно расчет отклонения кончика иглы при поступательном движении в однородном материале. Приведены результаты моделирования для различной плотности материала и различного угла острия иглы. Проведено сравнение экспериментальных данных с результатами, полученными при расчете с помощью разработанной модели.
Брахитерапия, роботизированная система, инъекционная игла, отклонение иглы
Короткий адрес: https://sciup.org/146281841
IDR: 146281841 | УДК: 51-72, | DOI: 10.15593/RZhBiomeh/2018.4.03
Model of the deviation of the medical needle during the movement in human tissue
In this paper, a mathematical model describing the deviation of the medical steel needle when it moves in the phantom of soft tissues (human tissues). This model will expect for use in the operational mode, where high precision positioning of the tip of the needle is necessary. The needle have asymmetric tip and because when the needle moves, it to deviate from rectilinear motion. Thus, by inserting and rotating the needle around its axis, it is possible to move the tip of the needle along a predetermined path. Consequently, having developed the model with its help, it will be possible to track the movement of the needle in the tissues or to predict optimal puncture points. The general formulation of the problems is considered and one of the sub-tasks is solved, as well as the available calculation of the needle tip deflection during the translational movement in a homogeneous material. The article shows the model used and the simulation results for different material densities and different needle tip angles. Comparison of the experimental data with the results obtained in the calculation using the proposed model is given.
Текст научной статьи Модель отклонения медицинской иглы при движении в тканях человека
В настоящее время в медицине для выполнения операций различной сложности широко применяются робототехнические комплексы. На сегодняшний день в Центральном научно-исследовательском и опытно-конструкторском институте робототехники и технической кибернетики разработан макет роботизированной системы «ОнкоРОБОТ» для брахитерапии рака предстательной железы (РПЖ) [2, 3]. Данная процедура проводится посредством внедрения микроисточников радиоизлучения в предстательную железу максимально близко к опухоли. Основная сложность заключается в подведении кончика иглы к целевой точке (опухоли) при проведении операции.
Морозов Виктор Александрович, д.ф.-м.н., профессор кафедры физической механики, Санкт-Петербург
Никитин Сергей Александрович, начальник лаборатории медицинской техники, Санкт-Петербург
Преимущества использования роботов по сравнению с традиционными методами заключаются в том, что роботизированный манипулятор способен обеспечить практически любую требуемую точность наведения инструмента и его контролируемого силового воздействия, что позволяет рассчитывать не только на повышение качества освоенных в настоящее время операций, но и создание базиса для разработки принципиально новых хирургических технологий. Другим важным преимуществом является отсутствие прямого контакта врача с радиоактивными источниками, что позволит обезопасить медицинский персонал от сопутствующего радиационного облучения.
Из-за своих геометрических особенностей и прилагаемых нагрузок в процессе выполнения операции игла деформируется, что приводит к ее отклонению от прямолинейного движения.
Таким образом, необходимо построить модель и создать на ее основе такой программный продукт, который позволяет прогнозировать и корректировать движение иглы при работе роботизированной системы.
Совместив данный продукт с другими системами, можно будет прогнозировать более оптимальные точки для прокола при проведении операции, корректировать движение иглы для повышения точности. Отладив данную модель и дополнив ее моделью вязкоупругих тканей, можно будет моделировать процесс проведения операции в различных целях, к примеру, для обучения работников медицинской сферы.
Управление движением иглы осуществляется путем поворота иглы вокруг своей оси. При этом кончик иглы поворачивается, а вместе с ним и плоскость изгиба дуги, тем самым изменяется направление дальнейшего движения. При ведении иглы вдоль прямолинейной траектории ее необходимо постоянно поворачивать.
Рассматриваются так же возможности применения гибких игл [9]. Основные преимущества, которые дает использование таких игл, ‒ это возможность реализации криволинейных траекторий движения иглы в теле пациента, возможность корректировки траектории движения иглы в процессе введения и возможность существенного уменьшения общего объема травмированных тканей человека при проведении операций. Иглы с высокой степенью гибкости изготавливаются из специальных материалов. Для проведения операций иглы начинают делать более сложными и многофункциональными.
Для моделирования отклонения иглы при ее движении в тканях человека в настоящее время используется достаточно большое количество подходов. В работе [7] моделирование проводилось с использованием неголономной кинематической модели. Как отмечают сами авторы, поскольку работа проводилась в первом приближении, то результаты моделирования сильно отличаются от экспериментальных.
В работе [8] математическое моделирование оптимальной криволинейной траектории движения иглы осуществлялось с помощью алгоритмов планирования траектории. Формирование траектории выполнялось с помощью координат, конфигурирующих область. Здесь выделялись те ее части, которые необходимо обходить, и те части, которые могут являться возможным вариантом траектории. Выделение таких областей предлагается выполнить с помощью четырех методов: метода потенциальных полей, метода дорожных карт, метода декомпозиционного планирования и метода координатных сеток.
В работе [6] рассматривается несколько методов для моделирования движения иглы. Первый подход – кинематический. Он описывает траекторию движения исходя из привязки к глобальной системе координат и предполагает, что благодаря конструктивной особенности кончика игла будет перемещаться по круговой траектории. Для данного метода описания предполагается использование unicycle model и bicycle model. Впервые данные методы были использованы в работе [10]. Поскольку предложенные модели не учитывают взаимодействие иглы с окружающими тканями, то они пригодны для описания взаимодействия иглы с достаточно мягкими тканями.
Второй подход – механический. Он описывает систему взаимодействия сил между иглой и тканью, в которой она находится. С одной стороны, требуются силы для перемещения иглы внутри ткани, с другой стороны, на тело иглы воздействуют силы трения, силы распределенной нагрузки, а в силу несимметричности кончика иглы на него также воздействует сила, оказывающая давление со стороны ткани.
Также для механического описания иглы можно использовать уравнения изгиба тонких гибких стержней [5]. С помощью такого подхода удобно будет оценивать устойчивость стержня – иглы.
В «классических» системах для процедур брахитерапии применяются исключительно обычные металлические прямые иглы. Исходя из этого, целесообразна разработка модели для описания отклонения стальной иглы при движении в тканях человека. В данной работе будет использован новый подход для описания сил, действующих на кончик иглы.
Постановка задачи
Общая постановка задачи
Необходимо разработать модель для определения положения кончика асимметричной медицинской инъекционной иглы (рис. 1) в системе координат манипулятора Oxyz при поступательном и вращательном движении иглы.
Рис. 1. Форма используемой иглы
Данная задача является объемной и междисциплинарной. Для ее решения нужно затронуть несколько разделов механики и есть большое количество начальных и граничных условий. При предложенном численном решении не должно быть использовано большое количество ресурсов, и оно должно подходить для итерационного решения во время работы системы. Приведем возможные задачи:
-
1. Расчет движения иглы в плоскости Oxy , деформация иглы в зависимости от поступательного движения.
-
2. Расчет движения иглы в трехмерном пространстве в зависимости от вращательного и поступательного движения.
-
3. Моделирование процесса прокола, получение изгиба иглы перед внедрением ее в ткани (нагрузка и разгрузка иглы в процессе прокола).
-
4. Моделирование движения иглы через материалы различной плотности (кожа, мышцы, орган).
-
5. Моделирование влияния сил, создаваемых тканью при ее деформации, на поверхность иглы.
-
6. Моделирование силы трения при внедрении иглы в ткани.
-
7. Моделирование деформации вязкоупругих тканей.
Как видно из приведенных пунктов, для полного решения задачи необходимо учитывать достаточно много параметров. В данной работе рассматривается первый пункт.
Постановка решаемой задачи
Необходимо разработать модель для определения положения кончика асимметричной иглы (рис. 1‒3) в системе координат Oxy при поступательном движении иглы в тканях человека (1). Модель должна учитывать параметры иглы и параметры среды, с которой она взаимодействует.
Также примем, что игла не может сжиматься, поскольку плотность среды намного ниже, чем плотность иглы.
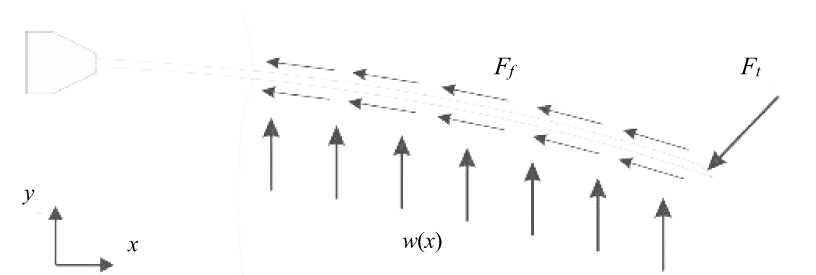
Рис. 2. Перемещаемая игла в тканях человека
На рис. 2 представлены возможные силы, действующие на иглу при ее движении:
-
• F t – сила, действующая на кончик иглы;
-
• F f ‒ сила трения, возникающая при движении иглы внутри ткани;
-
• w ( x ) – распределенная нагрузка (сила, которую оказывает ткань на поверхность иглы).
Уравнение равновесия сил может быть представлено в следующем виде:
F needle = F + Ff + * ( *), (1)
где F needle – сила, с которой внедряется игла.
В данной работе будет рассмотрена более простая постановка задачи:
F„„, = Ft . (2)
На рис. 3 показаны учитываемые силы, действующие на иглу, которые рассмотрим при решении задачи в первом приближении:
-
• F – сила, действующая на кончик иглы;
-
• l ( t ) – длина иглы;
-
• v – скорость движения иглы в тканях человека;
-
• α ‒ гол наклона острия иглы;
-
• γ ‒ угол, под которым действует сила.
В данной постановке мы не будем учитывать изгиб иглы под действием силы тяжести, так как при проведении эксперимента игла прокалывала фантом мягких тканей сверху вниз. При таком движении иглы воздействие силы тяжести пренебрежимо мало и не влияет на искривление иглы.
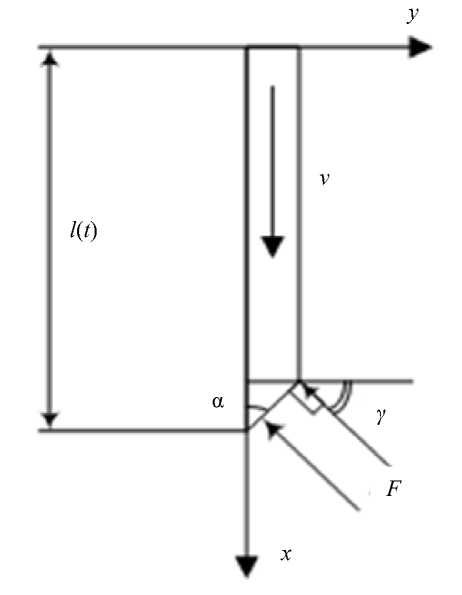
Рис. 3. Действующие на иглу силы
Модель
Для решения поставленной задачи отклонение кончика и угол отклонения будем рассчитывать по формулам [1]
y = ,
n 3 EJ ,
0 =FK*, 2EJx где n ‒ текущая итерация моделирования; yn ‒ перемещение кончика иглы на текущем шаге времени; F ‒ сила, действующая на кончик иглы при ее движении; lx ‒ осевой момент инерции; l(t) ‒ длина иглы, находящаяся в тканях человека; t ‒ время; E ‒ модуль Юнга; θ ‒ угол смещения.
В данном случае осевой момент вычисляется по формуле
J "D X , (5) x 12
где s ‒ толщина стенки иглы; D ‒ диаметр среднего сечения иглы (рис. 4).
В данном случае игла представляется в виде консольной балки с жесткой заделкой с одной стороны. Местом закрепления будем считать место прокола. Тогда получается, что с ростом времени длина балки будет увеличиваться. Таким образом, при каждом шаге по времени будет рассчитываться новое отклонение.
Размер элементарных клеток (молекул) во много раз меньше, чем габаритные размеры иглы. Скорость перемещения иглы в среде достаточно низкая, а плотность среды достаточно высокая по сравнению с воздухом. Исходя из этого, для моделирования внешней силы F needle при перемещении иглы в тканях человека можно использовать силу лобового сопротивления
F = C ρν S , (6)
где C ‒ коэффициент сопротивления; ρ ‒ плотность; v ‒ скорость перемещения иглы;
S ‒ характерная площадь тела, S = V 3 , где V ‒ объем тела [4].
В табл. 1 приведены параметры, которые будут использованы при расчетах.
Таблица 1
Параметры для расчетов
|
Наименование параметра |
Значение |
|
d внеш ‒ диаметр иглы внешний, м |
0,001 |
|
d внутр ‒ диаметр иглы внутренний, м |
0,0008 |
|
E ‒ модуль Юнга, н/м2 |
2,0 ⋅ 1011 |
|
ρ ‒ плотность, кг/м3 |
900–1500 |
|
v ‒ скорость перемещения иглы, м/с |
0,003–0,03 |
|
C ‒ коэффициент сопротивления формы |
0,82 |
|
l ‒ максимальная длина иглы, м |
0,1 |
Для расчета отклонения иглы по выражениям (1) и (2) учитывается только проекция силы F на ось Oy.
На рисунке 5 показана схема приложенной силы воздействия среды
FP = F ⋅ cos γ , (7)
где F - проекция на ось Oy силы, действующей на кончик иглы при ее движении.
В данной постановке задачи по предложенным выражениям (3), (4), (6) будем рассчитывать отклонение итерационно, суммируя его с предыдущими шагами. Тем самым будет сохраняться отклонение на каждом шаге моделирования:
n - 1
y all = ∑ y n , (8)
где n ‒ текущая итерация моделирования; y - суммарное отклонение иглы при ее движении в тканях человека; y - отклонение иглы на текущем шаге времени.
Рис. 4. Параметр D для расчета осевого момента инерции
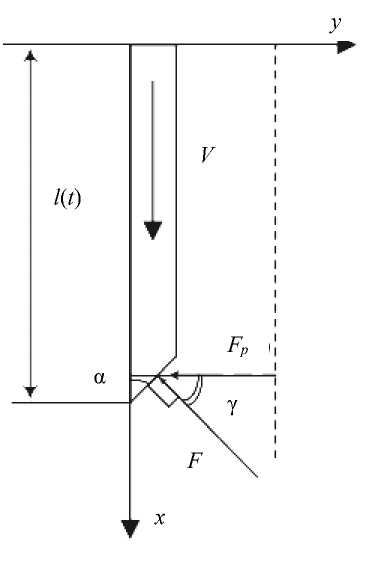
Рис. 5. Схема приложенной силы воздействия среды
Моделирование
Так как ткань может быть неоднородна или в каждом отдельно взятом случае средняя ее плотность может быть различна, то моделирование проводится для разных значений плотности среды (от 900 до 1500 кг/м3). Также моделирование осуществляется для значений скорости в диапазоне от 0,003 до 0,03 м/с. Для моделирования будут использованы углы острия иглы а = 30, 45, 60 ° .
В табл. 2 приведены результаты численных расчетов для соответствующих углов острия иглы.
Таблица 2
Результаты расчетов нагруженного состояния для разных углов острия иглы при различной плотности материала и скорости введения
|
Линейная скорость, мм/с |
Величина отклонения кончика иглы, мм |
||||
|
1500 кг/м3 |
1300 кг/м3 |
1100 кг/м3 |
1000 кг/м3 |
900 кг/м3 |
|
|
Угол острия иглы 30° |
|||||
|
3 |
0,026 |
0,022 |
0,019 |
0,017 |
0,016 |
|
6 |
0,104 |
0,090 |
0,076 |
0,069 |
0,062 |
|
9 |
0,233 |
0,202 |
0,171 |
0,155 |
0,140 |
|
12 |
0,414 |
0,359 |
0,304 |
0,276 |
0,248 |
|
15 |
0,647 |
0,561 |
0,474 |
0,431 |
0,388 |
|
18 |
0,932 |
0,807 |
0,683 |
0,621 |
0,559 |
|
21 |
1,268 |
1,099 |
0,930 |
0,845 |
0,761 |
Окончание табл. 2
|
Линейная скорость, мм/с |
Величина отклонения кончика иглы, мм |
||||
|
1500 кг/м3 |
1300 кг/м3 |
1100 кг/м3 |
1000 кг/м3 |
900 кг/м3 |
|
|
Угол острия иглы 30° |
|||||
|
24 |
1,656 |
1,435 |
1,214 |
1,104 |
0,994 |
|
27 |
2,096 |
1,816 |
1,537 |
1,397 |
1,258 |
|
30 |
2,588 |
2,243 |
1,898 |
1,725 |
1,553 |
|
Угол острия иглы 45° |
|||||
|
3 |
0,037 |
0,032 |
0,027 |
0,024 |
0,022 |
|
6 |
0,146 |
0,127 |
0,107 |
0,098 |
0,088 |
|
9 |
0,329 |
0,285 |
0,242 |
0,220 |
0,198 |
|
12 |
0,585 |
0,507 |
0,429 |
0,390 |
0,351 |
|
15 |
0,915 |
0,793 |
0,671 |
0,610 |
0,549 |
|
18 |
1,317 |
1,142 |
0,966 |
0,878 |
0,790 |
|
21 |
1,793 |
1,554 |
1,315 |
1,195 |
1,076 |
|
24 |
2,342 |
2,030 |
1,717 |
1,561 |
1,405 |
|
27 |
2,964 |
2,569 |
2,174 |
1,976 |
1,778 |
|
30 |
3,659 |
3,171 |
2,683 |
2,440 |
2,196 |
|
Угол острия иглы 60° |
|||||
|
3 |
0,045 |
0,039 |
0,033 |
0,030 |
0,027 |
|
6 |
0,179 |
0,155 |
0,131 |
0,120 |
0,108 |
|
9 |
0,403 |
0,350 |
0,296 |
0,269 |
0,242 |
|
12 |
0,717 |
0,621 |
0,526 |
0,478 |
0,430 |
|
15 |
1,120 |
0,971 |
0,822 |
0,747 |
0,672 |
|
18 |
1,613 |
1,398 |
1,183 |
1,076 |
0,968 |
|
21 |
2,196 |
1,903 |
1,610 |
1,464 |
1,318 |
|
24 |
2,868 |
2,486 |
2,103 |
1,912 |
1,721 |
|
27 |
3,630 |
3,146 |
2,662 |
2,420 |
2,178 |
|
30 |
4,482 |
3,884 |
3,287 |
2,988 |
2,689 |
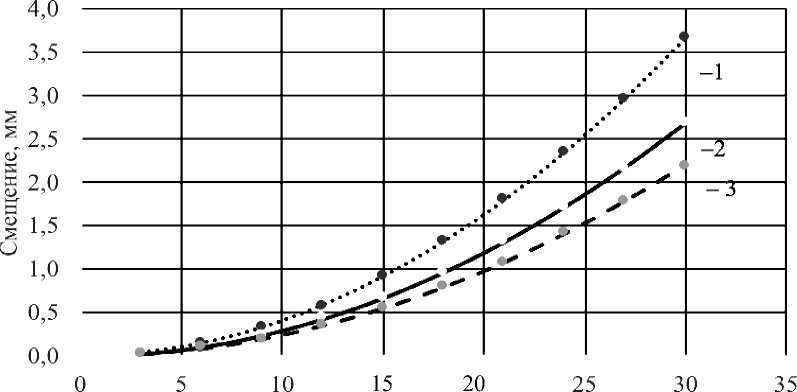
На рис. 6 приведены графики, показывающие отклонение иглы при ее внедрении с различным углом острия при плотности материала 1500 кг/м3. Из графиков на рис. 6 видно, что игла с меньшим углом острия менее отклоняется от прямолинейного движения.
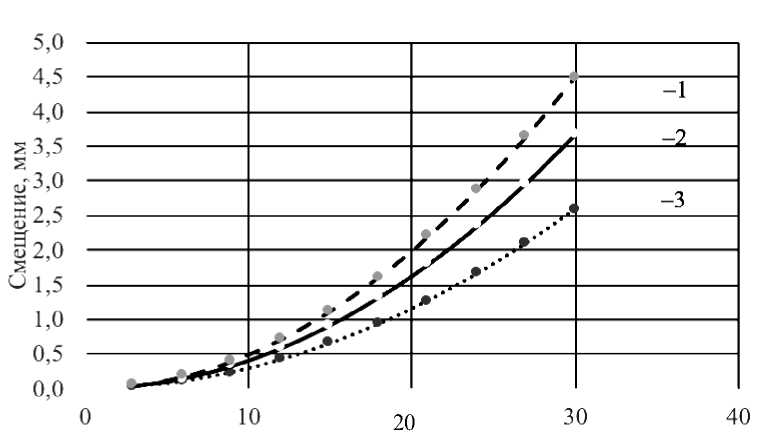
На рис. 7 показаны графики отклонения кончика для иглы с острием 45 ° при ее движении в материалах с разной плотностью.
Из графиков на рис. 7 видно, что среда с более низкой плотностью менее влияет на отклонение иглы.
Для корректной работы данной модели требуется достаточно малый шаг по времени. В табл. 3 приведены данные, показывающие необходимый шаг по времени для соответствующих скоростей внедрения иглы.
Скорость, мм/с
Рис. 7. Графики отклонения иглы в зависимости от скорости при различной плотности материала: 1 – 1500 кг/м3; 2 – 1100 кг/м3; 3 – 900 кг/м3
Скорость, мм/с
Рис. 6. Графики отклонения иглы в зависимости от скорости при различных углах острия: 1 - 30 ° , 2 - 45 ° , 3 - 60 °
Эксперимент
На рис. 8 показана испытательная установка для проведения эксперимента. На рис. 9, 10 приведены пример используемой иглы для проведения экспериментов, а также фантом мягких тканей, в теле которого делаются проколы. Игла имеет угол острия 45°. Плотность фантома тканей ≈ 1500 кг/м3.
Таблица 3
|
Линейная скорость, мм/с |
Шаг по времени, с |
|
3 |
3,33·10‒6 |
|
9 |
1,11·10‒6 |
|
15 |
6,67·10‒7 |
|
21 |
4,77·10‒7 |
|
24 |
4,17·10‒7 |
|
27 |
3,71·10‒7 |
|
30 |
3,34·10‒7 |
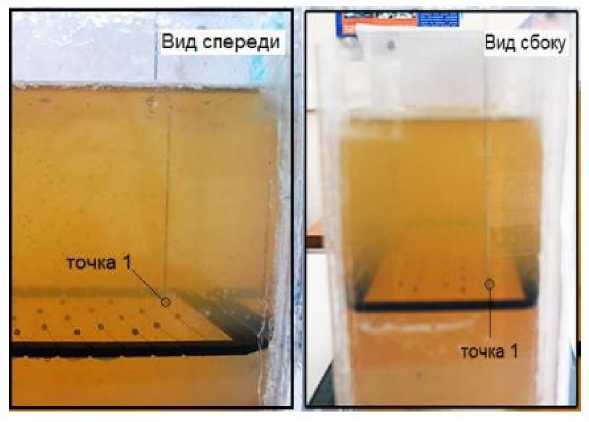
Рис. 10. Фантом мягких тканей и игла
Игла перемещалась вертикально в диапазоне скоростей от 3 до 30 мм/с с помощью робота-манипулятора. С помощью моторизованного микроскопа производилась сверка места положения кончика иглы с координатной сеткой.
Координатная сетка в виде прямоугольника, расположенного на глубине 100 мм, включает 100 точек с шагом в 10 мм.
В табл. 4 представлены результаты эксперимента.
Таблица 4
Результаты эксперимента
|
Линейная скорость, мм/с |
Величина отклонения кончика иглы, мм |
|
3 |
0,1 |
|
6 |
0,16 |
|
9 |
0,24 |
|
12 |
0,39 |
|
15 |
0,62 |
|
18 |
0,93 |
|
21 |
1,44 |
|
24 |
2,2 |
|
27 |
3,3 |
|
30 |
4,94 |
Анализ результатов моделирования
В табл. 5 приведены данные эксперимента и модели для иглы с углом острия 45° и плотностью фантома мягких тканей 1500 кг/м3.
На рис. 11 показаны экспериментальный и расчетный графики зависимости отклонения от скорости. Из рисунка видно, что эти зависимости несильно отличаются друг от друга. Из этого можно сделать вывод, что данный подход применим для определения отклонения при движении иглы.
Таблица 5
|
Линейная скорость, мм/с |
Величина отклонения кончика иглы, мм |
|
|
эксперимент |
модель |
|
|
3 |
0,1 |
0,037 |
|
6 |
0,16 |
0,146 |
|
9 |
0,24 |
0,329 |
|
12 |
0,39 |
0,585 |
|
15 |
0,62 |
0,915 |
|
18 |
0,93 |
1,317 |
|
21 |
1,44 |
1,793 |
|
24 |
2,2 |
2,342 |
|
27 |
3,3 |
2,964 |
|
30 |
4,94 |
3,659 |
Скорость, мм/с
Рис 11. Графики зависимости отклонения кончика иглы от скорости:
1 – результаты эксперимента; 2 – результаты моделирования
Неточность моделирования можно объяснить большим количеством допущений, которые на следующих итерациях разработки модели будут учтены.
Из графика на рис. 11 можно сделать вывод, что экспериментальная зависимость отклонения иглы имеет большую нелинейность, чем расчетная.
Для дальнейшего описания поведения среды и учета данных нелинейностей при движении иглы можно будет воспользоваться формулами Чаплыгина ‒ Блазиуса. Данный подход позволит более точно учесть влияние формы иглы при взаимодействии с внешней средой. Более корректная формулировка силы, создаваемой средой, позволит увеличить точность во всем диапазоне скоростей.
Заключение
В данной работе был произведен анализ существующих методов описания отклонения иглы при ее движении в тканях человека.
Проведена декомпозиция процесса разработки полной модели, описывающей отклонение иглы при ее взаимодействии с данной средой, определены этапы разработки модели.
Разработана модель, описывающая отклонение иглы в реальном времени. Для построения модели использовался новый подход. Суть его заключалась в том, что внешняя сила, действующая на иглу, представлялась в виде силы лобового сопротивления. Данный подход был взят из гидроаэромеханики, что позволило достаточно сильно упростить модель. Данная упрощенная модель может быть легко интегрирована в системы управления.
Благодарности
Статья подготовлена при финансовой поддержке Министерства науки и высшего образования РФ в рамках выполнения государственного задания № 12.4161.2017/4.6.
Список литературы Модель отклонения медицинской иглы при движении в тканях человека
- Беляев Н.М. Сопротивление материалов. - М.: Наука, 1976. - 607 с.
- Грязнов Н.А., Киреева Г.С., Харламов В.В., Сенчик К.Ю., Новицкий Д.В., Никитин С.А. Управление роботом для брахитерапии на основе информации ультразвукового датчика // Робототехника и техническая кибернетика. - 2016. - T. 1. - С. 67-71.
- Грязнов Н.А., Киреева Г.С., Харламов В.В., Сенчик К.Ю., Новицкий Д.В., Никитин С.А. Перспективы использования оригинальной роботизированной системы для брахитерапии рака предстательной железы // Вестник хирургии им. И.И. Грекова. - 2017. - Т. 176, № 1. - С. 107-111.
- Идельчик А.Е. Справочник по гидравлическим сопротивлениям. - М.: Машиностроение, 1992. - С. 469-500.
- Икрин В.А. Сопротивление материалов с элементами теории упругости и пластичности. - М.: Издательство АСВ, 2004. - С. 159-165.
- Abayazid M. Integrating deflection models and image feedback for real-time flexible needle steering // IEEE Transactions on Robotics. - 2013. - Vol. 29. - P. 542-553.
- Jienan D. Medical needle steering for lung biopsy: experimental results in tissue phantoms using a robotic needle driver // Imaging Science and Information Systems (ISIS) Department of Radiology, Goergetown University Medical Center. - Washington, 2008.
- Kemal F. Advanced path planning for a neurosurgical flexible catheter. - Delft University of Technology, 2012. - P. 14-18.
- Seong Y.K., Luca F., Ferdinando R. Closed-loop planar motion control of a steerable probe with a "programmable bevel" inspired by natureю Department of Mechanical Engineering, Imperial College. - London, 2010. - P. 970-983.
- Webster R.J., Kim N.J.S., Cowan J., Chirikjian G.S., Okamura A.M. Nonholonomic modeling of needle steering // Int. J. Robot. Res. - 2006. - Vol. 25, № 5/6. - P. 509-525.
