Модель отклонения трактора от прямолинейного движения под действием внешних нецентральных сил

Автор: Жаков Андрей Олегович, Трояновская Ирина Павловна
Рубрика: Расчет и конструирование
Статья в выпуске: 3 т.20, 2020 года.
Бесплатный доступ
Особенностью тракторных агрегатов и строительно-дорожных машин является особое взаимодействие с грунтом. Силовое воздействие на базовый трактор осуществляется не только через движитель, но и со стороны рабочего органа. Часто внешняя сила со стороны рабочего органа является нецентральной, то есть ее линия действия не проходит через центр тяжести машины. Это приводит к неуправляемому вращательному сдвигу базового трактора. Машина теряет курсовую устойчивость и отклоняется от прямолинейного движения под действием внешних сил. Это неуправляемое криволинейное движение на сегодняшний день мало исследовано. Оно представляет собой совокупность прямолинейного управляемого движения и неуправляемого криволинейного сдвига. В статье разработана математическая модель неуправляемого движения трактора, состоящая из уравнений движения и системы силового равновесия. Силовое взаимодействие движителя с грунтом основано на математической теории трения. Результирующая касательная сила и стабилизирующий момент в контакте являются функциями координат мгновенного центра скольжения движителя относительно грунта. Различные коэффициенты трения в продольном и поперечном направлении позволили учесть анизотропию взаимодействия в контакте. Упругие свойства грунта и шины учитывались за счет переменного коэффициента трения. Квазистатическая математическая модель позволила построить реальную траекторию движения с учетом внешних факторов, определить боковое отклонение трактора от прямолинейного движения в любом месте пути. Исследование влияния значения внешней силы, ее направления и точки приложения на траекторию движения на различных типах грунта позволит в дальнейшем найти способы сохранения курсовой устойчивости машины при действии на нее внецентренных внешних сил.
Трактор, отклонение от прямолинейного движения, сила на рабочеморгане, уравнения движения, силовое равновесие, силы в контакте движителя с грунтом
Короткий адрес: https://sciup.org/147233481
IDR: 147233481 | УДК: 629.11 | DOI: 10.14529/engin200302
Tractor motion model with deviation from a rectilinear movement under the influence of external off-center forces
A feature of tractor aggregates and road construction machines is a special interaction with the soil. Force action on the base tractor occurs not only through the mover, but also from the side of the working body. Often the external force from the side of the working body is not a central force, that is, the line of its action does not pass through the machine center of gravity. This results in an uncontrolled rotational shift of the base tractor. The machine loses directional stability and deviates from a rectilinear motion under the action of external forces. This uncontrolled curvilinear movement has been little studied to date. It is a combination of rectilinear controlled motion and uncontrolled curvilinear shift. The article developed a mathematical model of uncontrolled tractor movement, consisting of motion equations and a system of force equilibrium. The force interaction of the propulsion device with the soil is based on the mathematical theory of friction. The resulting tangential force and the stabilizing moment in contact are functions of the coordinates of the instant center of motion of the propulsion relative to the ground. Various friction coefficients in the longitudinal and transverse directions made it possible to take into account the anisotropy of the interaction in the contact. The elastic properties of the soil and tires were taken into account due to the variable friction coefficient. The quasistatic mathematical model allows you to build a real motion trajectory taking into account external factors, to determine the lateral tractor deviation from rectilinear motion anywhere in the path. Investigation of the effect of the external force value, its direction and point of application on the movement trajectory on various soil will allow us to further find ways to maintain the machine directional stability when eccentric external forces act on it.
Текст научной статьи Модель отклонения трактора от прямолинейного движения под действием внешних нецентральных сил
В настоящее время широкий интерес вызывают различного рода беспилотные проекты. Основной проблемой проектирования таких средств передвижения является разработка автоматизированной системы управления машиной. И если в области создания беспилотных автомобилей в мире наметился определенный прогресс [1–3], то относительно тракторной и строительнодорожной техники эти вопросы находятся еще в самом зародыше.
Объясняется это отставание более сложным внешним воздействием на базовую машину в составе тракторного агрегата. В отличие от автомобиля любой тракторный агрегат подвержен внешнему воздействию не только со стороны движителя, но и со стороны рабочего органа. Подчас именно внешние силы со стороны рабочего органа определяют характер движения транспортного средства.
Если внешняя сила не проходит через центр тяжести, ее называют внецентровой. Она, как правило, создает дополнительный разворачивающий момент, изменяющий управляемое движение машины.
Примеры действия внецентренной внешней силы
Характерным примером может служить движение сельскохозяйственного тракторного агрегата [4, 5]. Например, при работе трактора с консольной косилкой (рис. 1) сила сопротивления на рабочем органе приводит к отклонению машины от прямолинейного курса. Аналогичная ситуация наблюдается при вспашке земли (рис. 2). Конструкция лемешного плуга такова, что возникающие на нем силы сопротивления, направленные по нормали к отвальной поверхности, созда- ют разворачивающий момент. Для сохранения прямолинейного движения водителю приходится постоянно подправлять машину [6, 7], что приводит к повышенной его утомляемости.

Рис. 1. Трактор с консольной косилкой
Рис. 2. Трактор с лемешным плугом на вспашке
Боковые нагрузки на базовую машину встречаются и при работе строительно-дорожной техники. Наиболее характерной машиной в этом случае является автогрейдер [8, 9]. Эта машина с помощью дополнительной навески позволяет обрабатывать дорожные обочины (рис. 3). При управляющем воздействии со стороны водителя, соответствующем прямолинейному движению, машина часто теряет курсовую устойчивость за счет внешнего воздействия [10].
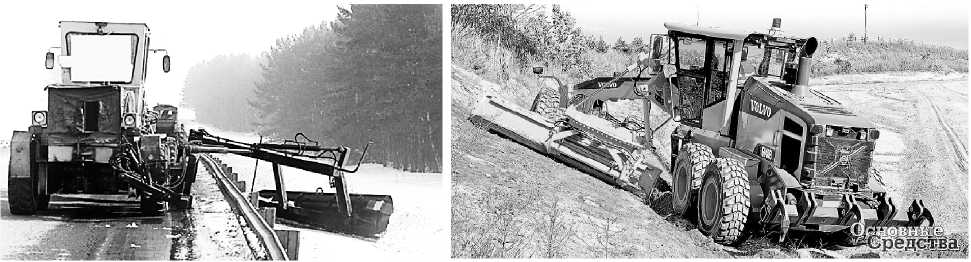
Рис. 3. Работа автогрейдера при чистке и укладке дорожных обочин
Отклонение трактора от управляемого прямолинейного движения возможно и при работе бульдозера. Так, в случае перекоса отвала (рис. 4) или работе с поворотным отвалом (рис. 5) вся внешняя нагрузка воспринимается одним краем, что тоже приводит к возникновению внешнего разворачивающего момента, влияющего на характер движения трактора [11, 12].
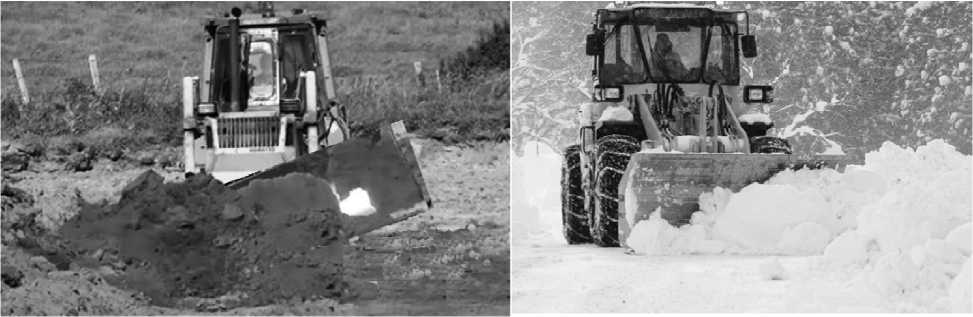
Рис. 5. Работа снегоочистительного трактора с поворотным отвалом
Рис. 4. Работа бульдозерного агрегата с перекосом отвала
Отклонение трактора от управляемого прямолинейного движения получило название пассивного увода [13, 14]. Этот вид движения на сегодняшний день мало изучен, поскольку криво-
Жаков А.О., Трояновская И.П.
линейное движение в основном исследуется на примерах активного поворота [15]. При создании различных систем помощи водителю воздействие внецентровых внешних сил на движение машины должно быть обязательно учтено.
Цель исследования
При проектировании беспилотных транспортных средств на первое место выходит задача управления. Однако ее решение невозможно без разработки математической модели движения с учетом всех внешних факторов. В связи с этим целью исследования является построение математической модели пассивного увода тракторного агрегата при воздействии внешних внецентрен-ных сил.
-
1. Математическая модель
Пассивный увод представляет собой совокупность двух типов движения:
– управляемого (при воздействии водителя) прямолинейного движения;
– неуправляемого (под действием внешних сил) пассивного сдвига.
Математическая модель увода представляет собой квазистатическую модель, состоящую из модели криволинейного движения и модели силового равновесия.
-
1.1. Уравнения движения
Все тракторные агрегаты являются машинами циклического типа, технологический цикл ко- торых включает рабочий и транспортный режим движения. Внешние нагрузки со стороны рабо- чего органа действуют в рабочем режиме, когда скорость движения трактора невысока и, как правило, постоянна V = const. Это позволяет пренебречь ускорениями.
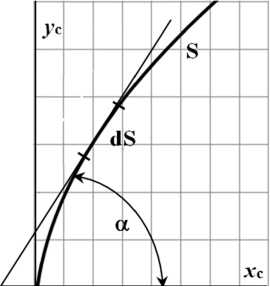
Рис. 6. Связь криволинейной координаты S с декартовыми координатами х с и у с
Построим модель отклонения тракторного агрегата от прямолинейного движения под действием внешних сил. Для этого преобразуем криволинейную координату S естественной системы подвижного трехгранника в декартовы координаты хс, ус на основе криволинейного интеграла первого рода (рис. 6).
При начальных нулевых координатах уравнения движения имеют вид:
cosadS sinadS
}
х с = 4
Ус = J$ где хс, ус - текущие координаты центра тяжести трактора;
dS – дифференциал криволинейной координаты в точке α – угол касательной к кривой в точке с осью x.
Запишем дугу S через радиус кривизны ρ и угол касательной α соотношением dS = pda. (2)
Учитывая, что dS = VdT и a = / (V / p)di , формулы (1) приобретают вид [16]: Т t V
^ с = J o Vcos^J0 - dz)dt
Ус = JoTvsin (Jo V dT)dt где t = 0.. .Т - время; V - скорость движения транспортного средства.
Таким образом, для построения траектории движения необходимо знать радиус кривизны ρ в каждый момент времени. Его значение определяется действием внешних сил. Для этого составим силовую модель.
-
1.2. Силовое равновесие
При пассивном уводе произвольного тракторного агрегата на него действуют силы со стороны движителя F и со стороны рабочего органа P. В каждый момент времени система действую- щих на трактор сил уравновешена, что позволяет записать уравнения равновесия:
Fx + Рх = 0,
I
Fy + Ру = 0, Мс + МС(Р) = 0, где Fx, Fy - сумма поперечных и продольных составляющих сил со стороны движителя, Mc - суммарный момент сопротивления в контакте движителя с грунтом; Px, Py,Mc(P) - суммарные проекции на декартовы оси и момент от суммы внешних сил со стороны рабочего органа.
Рассмотрим силовое равновесие на примере сельскохозяйственного трактора с лемешным плугом (рис. 7).
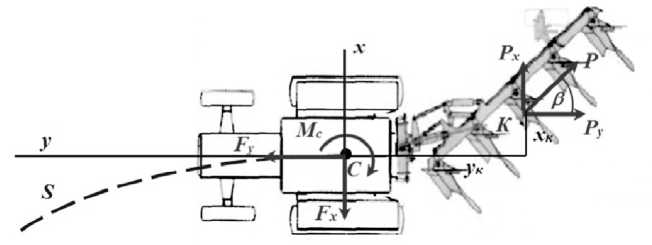
Рис. 7. Схема сил, действующих на тракторный агрегат при пахоте
Свяжем систему координат с центром С тяжести трактора. Приведем все силы на плуге к результирующей Р , приложенной в точке К , с координатами укхк. Тогда проекции внешней силы на плуге на декартовы оси будут равны:
Px = Psine, Py = —Pcose . (5)
Момент внешней силы относительно центра тяжести трактора в общем виде имеет вид:
M c (P) = Pxyk - P y Xk . (6)
-
1.3. Силы в контакте движителя с грунтом
Управляемое водителем движение является прямолинейным и характеризуется отсутствием относительного движения между опорами движителя (колесами или гусеницами). Это позволяет рассмотреть контакт с грунтом как единую площадку с разрывными вдоль и поперек пределами.
В силу того, что силы в контакте движителя с грунтом по своей природе являются силами трения [17], воспользуемся математической теорией трения. Силовые факторы при плоском скольжении движителя относительно грунта являются функциями координат мгновенного центра скольжения и имеют вид [18]:
F = —q ff ц / y. ф ^— d y d o ,
X W 7(У- Ф )2 + (х- у )2 1
F = q ff Ц ~^==== d y d o , У ^ 7(У-Ф)2 + (Х-Т)2
M = qH ^Y ^ V (У — Ф ) 2 + (х — Y ) 2 d y d p , M c = F y X — F x y — M .
где p - коэффициент сцепления движителя с грунтом; q - нормальное давление в контакте;
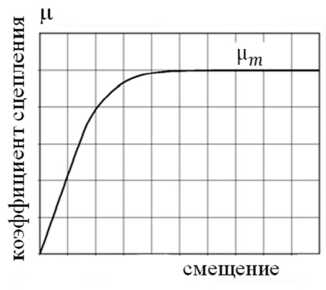
Рис. 8. Качественная зависимость коэффициента сцепления от смещения относительно грунта
x, y – координаты мгновенного центра скольжения при плос-
ком сдвиге; у, ф - текущие координаты точек контакта.
Наличие несимметричного профиля протектора шин или
грунтозацепов на гусеницах приводят к анизотропии взаимодействия, которая может быть учтена с помощью различных
коэффициентов сцепления в продольном ру и поперечном рх
направлении. В этом случае момент сопротивления в контакте
имеет вид [19]:
M = qH
ϕγ
Цх(у-ф)2+у(х-у)2
V(y-V)2 + (x-y)2
^у^ф.
Упругие свойства грунта и шины в контакте учтем по-
средством переменного коэффициента сцепления µ (рис. 8), зависящего от смещения [20–22].
Жаков А.О., Трояновская И.П.
Смещение движителя относительно грунта напрямую зависит от радиуса р кривизны траектории. Это позволяет записать переменный коэффициент сцепления в виде:
н = мЧ* ^. (9)
где ц т - максимальный коэффициент сцепления (при 100%-ном буксовании); th - функция гиперболического тангенса; λ – эмпирический коэффициент, характеризующий упругие свойства в контакте (грунта или шины).
В результате модель силового равновесия (4) с учетом всех преобразований (5)–(9) принима- ет вид:
^^^^^в
гг ^hHifc^ q ^Y 7(У-Ф)2 + (Х-У)
, 2
dyd^ + Рзипв = 0,
^ymth[ ХЙ^] (^-Y)
^ Д„ 7( У -ф)2 + (х-у)2 ^Ф - РС05 в = 0,
^™th[ XS](x"Y)
^ V(y_w) 2 +(x_Y) 2 ^Ф +
^^thl xs](y-v) л
-
+ yq II —, ^ —- аунф —
VY V(y~V)2 + (x~Y)2
^^^^^в
-
^^th| XS](y-V)2 + ^ymth[ ^^](^"Y)2 q| ----- / „ —----dv^v +
-
2. Результаты исследования (построение траектории)
vy Vcy-v^^+cX^Y)2
+ykPsvne + хкРсозв = 0.
Из уравнений (10) видно, что для каждой внешней сдвигающей силы со стороны рабочего органа (с модулем Р , углом наклона в и координатами точки приложения yfc , %fc ) можно однозначно определить координаты х, у мгновенного центра скольжения и радиус кривизны траектории ρ базового трактора. Далее на основе уравнений движения (3) строится траектория движения с учетом внешних сдвигающих сил со стороны рабочего органа (рис. 9).
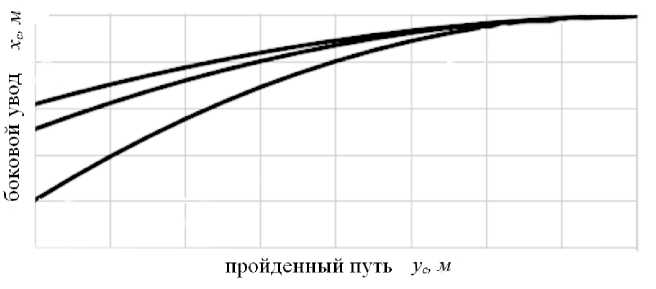
Рис. 9. Траектория увода сельскохозяйственного трактора при действии внешней нагрузки на плуге
Выводы
Тракторные агрегаты отличаются от транспортных средств тем, что контактируют с грунтом не только посредством движителя, но и рабочим органом. Внешние усилия со стороны рабочего органа порой оказывают существенное влияние на движение базовой машины. Анализ работы различных тракторных агрегатов позволил выявить явление пассивного увода – отклонения трактора от управляемого движения водителя за счет действия внецентровых внешних сил. Этот тип движения на сегодняшний день оказался мало исследованным.
Пассивный увод представляет собой совокупность прямолинейного управляемого движения и неуправляемого криволинейного сдвига под действием внешних сил. В статье разработана ма- тематическая модель пассивного увода трактора, состоящая из уравнений движения и системы силового равновесия.
Силовое взаимодействие основано на математической теории трения и позволяет учесть анизотропию в контакте движителя с грунтом, а также упругие свойства грунта и шины.
Квазистатическая модель увода позволяет:
-
– построить реальную траекторию движения с учетом внешних факторов;
-
– определить боковое отклонение трактора от прямолинейного движения в любом месте пути;
-
– оценить влияние значения внешней силы, ее направления и точки приложения на траекторию движения;
-
– исследовать влияние характеристик грунта и скорости движения на параметры движения.
Список литературы Модель отклонения трактора от прямолинейного движения под действием внешних нецентральных сил
- Грошев, А.М. Беспилотные транспортные средства: настоящее и будущее / А.М. Грошев, А.В. Тумасов // Транспортные системы. – 2016. – № 2. – С. 68–83.
- Zhang, S. Modelling of an unmanned ground vehicle with new skid-steering inputs / S. Zhang, V.V. Vantsevich // 19th International and 14th European-African Regional Conference of the ISTVS. – 2017. – Number Article 132306.
- The development of ground unmanned vehicles, driver assistance systems and components according to patent publications / A.M. Saykin, G.S. Tuktakiev, A.V. Zhuravlev, E.P. Zaitseva // IOP Conference Series: Materials Science and Engineering. – 2018. – Vol. 315(1). Number Article 012025. DOI: 10.1088/1757-899X/315/1/012025
- Tractor path tracking control based on binocular vision / S. Zhang, Y. Wang, Z. Zhu et al. // Information Processing in Agriculture. – 2018. – Vol. 5, no. 4. – P. 422–432. DOI: 10.1016/j.inpa.2018.07.003.
- Бойков, В.П. Улучшение курсовой устойчивости тракторов «Беларус» / В.П. Бойков, А.И. Бобровник, С.А. Дорохович // Наука и техника. – 2016. – № 15(3). – С. 183–192.
- Path tracking control method of agricultural machine navigation based on aiming pursuit model / H. Wang, G. Wang, X. Luo et al. // Nongye Gongcheng Xuebao/Transactions of the Chinese Society of Agricultural Engineering. – 2019. – Vol. 35, no. 4. – P. 11–19. DOI: 10.11975/j.issn.1002-6819.2019.04.002.
- Liu, H. Robust Finite-time Convergent Trajectory Tracking Control for Unmanned Surface Vehicle / H. Liu, L. Zou // Proceedings: 2019 Chinese Automation Congress. – 2019. – No. 8996836. – P. 4124–4129. DOI: 10.1109/CAC48633.2019.8996836.
- Автогрейдеры: учебное пособие / В.И. Баловнев, Р.Г. Данилов, Г.В. Кустарев, Н.Д. Селиверстов. – Москва, 2014. – 144 с.
- Anderson, M. Motor graders / M. Anderson // Better Roads. – 2011. – Vol. 81, no. 3. – P. 24–25.
- Шевченко, В.А. Экспериментальное исследование влияния показателей курсовой устойчивости автогрейдера / В.А. Шевченко, А.М. Чаплыгина // Вестник Харьковского национального автомобильно-дорожного университета. – 2014. – № 65, 66. – С. 221–226.
- Берестов, Е.И. Методика расчета усилий на рабочем оборудовании бульдозера / Е.И. Берестов, И.В. Лесковец // Вестник Полоцкого государственного университета. Серия В: Промышленность. Прикладные науки. – 2009. – № 2. – С. 33–38.
- Brown, J.M. Soil excavation improvement from bulldozer blade oscillation / J.M. Brown // SAE Technical Papers – 1978. DOI: 10.4271/780776.
- Troyanovskaya, I.P. Ploughing Tractor Lateral Withdrawal Model / I.P. Troyanovskaya, B.M. Pozin, N.K. Noskov // Procedia Engineering. – 2017. – Vol. 206. – P. 1540–1545. DOI: 10.1016/j.proeng. 2017.10.674.
- Dual circle tangential line-tracking model based tractor navigation control method / W. Zhang, Y. Ding, Z. Li et al. // Nongye Jixie Xuebao/Transactions of the Chinese Society for Agricultural Machinery. – 2016. – Vol. 47, no. 10. – P. 1–10. DOI: 10.6041/j.issn.1000-1298.2016.10.001.
- Гладов, Г.И. Параметры криволинейного движения специальных транспортных средств / Г.И. Гладов, Л.А. Пресняков // Автомобильная промышленность. – 2017. – № 5. – С. 22–23.
- Тарг, С.М. Краткий курс теоретической механики / С.М. Тарг. – М: Высшая школа, 2002. – 416 с.
- Interaction between elements of the track ground contacting area with the soil at curvilinear motion of the timber harvesting machine / V.E. Klubnichkin, E.E. Klubnichkin, G.O. Kotiev et al. // IOP Conference Series: Materials Science and Engineering. – 2018. – Vol. 386(1). – Number Article 012016. DOI: 10.1088/1757-899X/386/1/012016.
- Opeiko, F.A. Mathematical Theory of Friction / F.A. Opeiko. – Minsk, 1971. – 149 p.
- Жаков, А.О. Влияние анизотропии на силовое взаимодействие гусеничного движителя с грунтом при повороте машины / А.О. Жаков, И.П. Трояновская // Тракторы и сельхозмашины. – 2020. – № 2.
- Wang D. Modeling and analysis of skidding and slipping in wheeled mobile robots: Control design perspective / D. Wang, C.B. Low // IEEE Transactions on Robotics. – 2008. – Vol. 24, no. 3. – P. 676–687. DOI: 10.1109/TRO.2008.921563
- Evaluation of a soil in terms of resistance to simple compression, tensile strength for diametral
- compression and resilience module, considering results of different types of compactation / A.M. da Silva, L.C.F. Lopes Lucena, A.E.F. Lopes Lucena et al. // Anuario do Instituto de Geociencias. – 2016. – Vol. 39, no. 3. – P. 41–47. DOI: 10.11137/2016_3_41_47.
- Force chains as the link between particle and bulk friction angles in granular material / A.M. Booth, R. Hurley, M.P. Lamb, J.E. Andrade // Geophysical Research Letters. – 2014. – Vol. 41, no. 24. – P. 8862–8869. DOI: 10.1002/2014GL061981.
