Моделирование динамики систем твёрдых и упругих тел: обзор пакетов моделирования

Автор: Хасенов И. М., Титов В. В., Сергеев А. В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Математическое моделирование. Численный эксперимент
Статья в выпуске: 8 т.17, 2024 года.
Бесплатный доступ
В статье представлен обзор существующих программных пакетов (сред) моделирования твердотельной и упругой динамики системы тел для сложных многокомпонентных механизмов робототехнических систем применительно к операциям сервисного обслуживания и орбитальной сборки космических аппаратов. Пакеты сравниваются по нескольким критериям и делается вывод о возможности применения их в рамках стенда полунатурного (hardware-in-loop) моделирования в земных условиях. Особое внимание уделяется возможности использования результатов построения конечно элементных моделей (КЭМ), а также возможность использования редуцированных моделей. Ключевым требованием к системам является возможность их использования в имитационном моделировании в реальном масштабе времени.
Суперэлемент, твердые тела, упругие элементы, динамика системы тел, hardware-in-loop (hil)-моделирование
Короткий адрес: https://sciup.org/146282967
IDR: 146282967 | УДК: 004.94.031.43:629.785.083.4
Flexible multibody dynamics: a review of simulation packages
A review of flexible multibody dynamics simulation packages is presented. The packages are studied for application in the real time hardware-in-loop simulators of in-orbit servicing processed. Particular attention is paid to import and reuse of the finite element (FEM) models already developed for the spacecraft and/or robotic system as well as their reduced versions. The crucial requirement for the packages to be checked is the architectural features providing possibility of real time execution.
Текст научной статьи Моделирование динамики систем твёрдых и упругих тел: обзор пакетов моделирования
Цитирование: Хасенов И. М. Моделирование динамики систем твёрдых и упругих тел: обзор пакетов моделирования / Хасенов И. М., Титов В. В., Сергеев А. В. // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(8). С. 1100–1115. EDN: ECVHBE
Задачи моделирования конструкций космических аппаратов
Задача сборки и обслуживания крупногабаритных конструкций в космосе не является новой и насчитывает уже более трех десятилетий своего развития [1, 2]. Реально проведенные экспериментальные исследования операции сервисного обслуживания космических аппаратов на орбите немногочисленны, но уже имели место в истории. Примерами могут служить: ETS-VII (KIKU-7) [3], Dexter (CSA) [4], Orbital Express [5], др.
В рамках любой миссии важными этапами являются предварительная подготовка (анализ проблемы, планирование, моделирование исполнения, т.д.), исполнение и контроль за ним, анализ результатов (ошибок и/или нового состояния космического аппарата). Во время предварительной подготовки происходит формирование последовательности операций и конкретных управляющих воздействий, которые впоследствии будут применены в ходе миссии. Контроль исполнения подразумевает возможность восстановить полную картину происходящего по ограниченной телеметрии. Анализ результатов должен дать полную картину уже произошедшего события по той же ограниченной телеметрии, а также состояния, в котором находится объект в результате проведенных манипуляций. На каждом из этих этапов необходима точная и интерпретируемая модель поведения всей системы в целом и ее отдельных частей.
Ведущие мировые космические агентства создают собственные наземные комплексы планирования и отработки миссий, специализированные для работы с их космическими аппаратами (КА) и средствами роботизации [6–12, др.]. Системы моделирования, реализуемые в рамках таких стендов, являются высоко специфичными, как правило, с закрытыми программной и аппаратной частями. Состав и степень детализации моделирующих комплексов сильно различаются, но в них можно выделить некоторые обязательные составляющие, продиктованные операционной и технической необходимостью:
-
- натурный макет (отработочный образец) исполнительной робототехнической системы (РТС);
-
- частичный или полный макет среды функционирования (КА) и целевого объекта взаимодействия;
-
- программный моделирующий комплекс, включающий расчет динамических процессов: исполнительной РТС; непосредственного окружения (включая КА) и целевого объекта взаимодействия; систем управления (КА, объекта взаимодействия и РТС).
Наличие в моделирующем комплексе физических макетов РТС и среды функционирования обусловлено невозможностью точного анализа процессов их взаимодействия путем компьютерного моделирования и/или его чрезмерной вычислительной ресурсоемкостью. Полуна-турное моделирование применяется преимущественно к следующим процессам, возникающим в ходе выполнения операций:
-
- большая часть контактных взаимодействий, включая контактные деформации и трение, сложное соприкосновение поверхностей,
-
- быстропротекающие (быстрее характерной тактовой частоты системы управления) и высокочастотные вибрационные процессы в конструкциях КА и РТС, удары,
-
- сложные упругие деформации в композитных материалах, тросах/кабелях.
С другой стороны, ряд процессов принципиально сложны в натурном моделировании. К ним можно отнести:
-
- движения и колебания крупногабаритных конструкций,
-
- движение РТС в неинерциальной системе отсчета (например, перемещение РТС по вращающемуся КА или сборке),
-
- теплопередачу в крупных участках КА и РТС или в процессе выполнения операций,
-
- атмосферные явления на низких орбитах.
Данные процессы могут быть реализованы (и/или упрощены) программно и требовать приемлемое (с точки зрения времени выполнения) количество вычислительных ресурсов. Наличие двух данных типов процессов обуславливает применение полунатурного моделирования (или hardware-in-loop (HIL) simulation – термин, чаще встречающийся в зарубежных источниках).
Еще одной (далеко не последней) областью применения полунатурного (HIL) моделирования являются испытания специализированного оборудования в составе КА. Например, если моделирование движения КА в наземных условиях невозможно (в силу больших массогабари-тов), то имитация движения сенсорного оборудования, размещенного на КА, осуществляется средствами стенда, имитирующими движение КА.
Цель исследования – анализ имеющихся средств и пакетов компьютерного моделирования, обладающих функционалом и инфраструктурными элементами, необходимыми для – 1102 – применения в качестве моделирующего комплекса в системах полунатурного моделирования (в том числе упругих элементов КА).
Наземная отработка и моделирование
Как уже было отмечено, отработка космических миссий в наземных условиях требует проведения комплексного моделирования, включающего в себя макеты РТС и элементов КА, а также программного моделирования части КА и/или окружения, которую невозможно физически отмакетировать в земных условиях.
Детализация процесса проектирования систем полунатурного моделирования требует принятия ряда решений и рассмотрения вопросов, связанных с обеспечением точности и устойчивости моделирования. Первым из таких вопросов является соотношение макетируемых и моделируемых частей системы. Первично оно определяется целями отработки и перечнем критических элементов, требующими проверки. Не единственный, но наиболее простой и понятный (на первом этапе проектирования) ответ на такой вопрос можно сформулировать как «макетируется та часть целевой системы, для которой требуется наибольшая точность моделирования происходящих в них процессов». Обратный подход дает другую формулировку ответа: «моделируется та часть системы, которая может моделироваться в реальном масштабе времени с частотой, достаточной для совместной работы с другими подсистемами» (под другими подсистемами понимаются, например, системы управления КА и/или РТС). Такой «водораздел» не является исчерпывающим, так как не дает ответа на вопрос, что делать, если эту систему нельзя смакетировать в земных условиях или нельзя смоделировать в реальном масштабе времени в силу ее большой размерности. Таким образом, дополнительно к данным формулировкам следует добавить критерий реализуемости. Финальный вариант разбиения системы есть компромисс между тремя указанными выше критериями, где каждый элемент системы может быть классифицирован сообразно диаграмме на рис. 1.
Предметом данной статьи являются категории элементов III, IV, V, VII. К категории III можно отнести, например, габаритные конструкции КА, которые допускают моделирование в виде твер-
Моделируемо
Не моделируемо
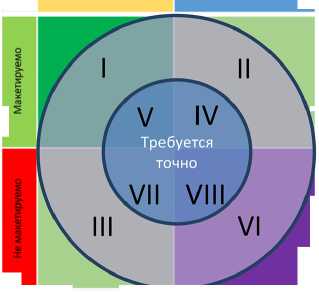
I - простые некритические элементы
II - сложные несильно критические элементы
III -технически сложные несильно критические элементы
V —простые критически важные элементы
VI - сложные критически важные элементы
VII - технически сложные критически важные элементы
-
IV, VIII-сложные элементы, испытания которых
возможны только в ходе выполнения миссии КА (возможно, цель создания КА)
Рис. 1. Классификация частей системы для разбиения на макетируемые/моделируемые в рамках полунатурного моделирования
-
Fig. 1. System parts classification for hardware/software implementation in HIL simulation
дых тел или упрощенных упругих тел (например, старшие моды колебаний солнечных батарей), а также элементы, допускающие простую тепловую модель. К категории VII может быть отнесено, например, влияние приливного момента (прямое макетирование которого потребовало бы достижения очень маленьких значений трения в шарнирах разгружающих устройств). Категория IV хорошо представлена контактными операциями, которые достаточно сложно точно промоделировать (особенно для объектов со сложной геометрией). Категория V является «спорной территорией», и решение относительно макетирования или моделирования может быть принято, только учитывая общую совокупность факторов и проектного облика стенда. К категории V могут быть отнесены оптические приборы, которые могут либо быть установлены непосредственно на стенд, либо моделироваться с применением пакетов 3D-графики (и графических ускорителей).
На рис. 2, табл. 1 представлены примеры возможного соотношения макетируемых-моделируемых частей стенда (КА/РТС).
Можно привести примеры процессов, которые предпочтительны для реализации в форме моделей:
-
- динамика твердых тел (кинематических цепей, свободных тел),
-
- динамика упругих тел (свободные и вынужденные колебания, изгиб под нагрузкой),
-
- динамика процессов управления,
-
- симуляция датчиковой аппаратуры КА (звездные датчики, гироскопы),
-
- симуляция работы движителей КА, силовых гиродинов, т.д.,
-
- логистические процедуры: планирование операций, коммуникация между устройствами, др.,
-
- нештатные ситуации.
Общие сложности, возникающие при моделировании
Сложность нескольких элементов или модели целиком приводит к невозможности моделирования в реальном масштабе времени с требуемой частотой.
Редуцированные модели оказываются слишком грубыми, чтобы качественно отражать физические процессы, что приводит к выходу из устойчивости при взаимодействии с макетируемой частью стенда.
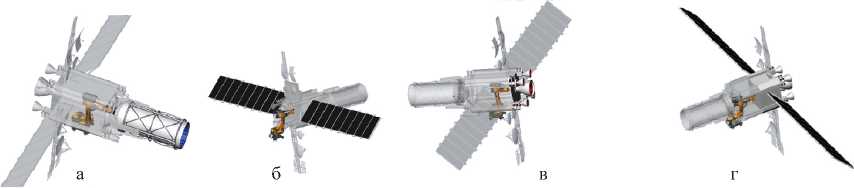
Рис. 2. Примеры соотношения макетируемых/моделируемых частей КА/РТС в зависимости от целей эксперимента: а – макетируется телескоп, б – макетируются солнечные панели, в – макетируются движители, г – макетируются движители и солнечные панели
-
Fig. 2. Examples of the hardware/software implemented parts of the spacecraft and/or robotic system depending on the experiment objectives: a – telescope is hardware implemented, б – solar panels are hardware implemented, в – thrusters are hardware implemented, г – thrusters and solar panels are hardware implemented
Таблица 1. Примеры соотношения макетируемых/моделируемых частей КА/РТС в зависимости от целей эксперимента
Table 1. Examples of the hardware/software implemented parts of the spacecraft and/or robotic system depending on the experiment objectives
|
Вид макетирования |
Возможные цели/задачи |
|
Ориентация а спецоборудования |
Акцент на отработке оборудования Точность динамических процессов ориентирования не так важна Допускаются упрощенные модели динамики |
|
б Макетирование упругих элементов |
Акцент на динамических процессах ориентации Отработка СУД в реальном времени Сложные нелинейные колебания конструкции Идентификация моделей динамики упругих элементов |
|
Макетирование в движителей |
Акцент на динамических процессах ориентации Отработка СУД в реальном времени Проверка работы движителей Идентификация/верификация/валидация моделей движителей |
|
Комплексное макетирование: г движители + гиродины +упругие элементы |
Акцент на динамических процессах ориентации Отработка СУД в реальном времени Проверка работы движителей Верификация/валидация моделей движителей |
Специализированные части стенда (такие как системы имитации движения или собственно макеты РТС и элементов КА) сами являются сложными динамическими системами, работа которых должна быть сопоставлена с моделируемым процессом, что приводит к необходимости разработки отдельной системы управления (СУ) для них.
На рис. 2 представлена схема HIL-моделирования, имитирующая движение КА (ориентацию и влияние колебаний солнечных батарей на нее). Предполагается, что моделируются корпус КА, часть датчиковой аппаратуры, крупные упругие элементы и движители, макетируются небольшие упругие элементы, стыковочные элементы, другая часть датчиковой аппаратуры.
Обзор программных пакетов моделирования динамики
Из предыдущего рассуждения о построении моделирующей части стенда можно выделить средства моделирования динамики движения, которые являются программной реализацией уравнений движения. Опыт мировых космических агентств связан в основном с созданием специализированных сред и пакетов для работы в рамках создаваемой ими инфраструктуры наземной отработки. Такие пакеты создаются для отработки особо важных объектов и не предназначены для широкого распространения. Они обладают всеми необходимыми характеристиками, но часто оказываются невостребованными после завершения проекта, что приводит к устареванию кодовой базы и мешает их повторному использованию уже в новых проектах. Открытые пакеты моделирования часто не удовлетворяют необходимым критериям для применения в рамках полунатурного (HIL) моделирования. В задачу данного подраздела входит сравнительный анализ общедоступных пакетов для выявления наиболее подходящих для долговременного использования в проектах с различной конфигурацией моделируемого оборудования.
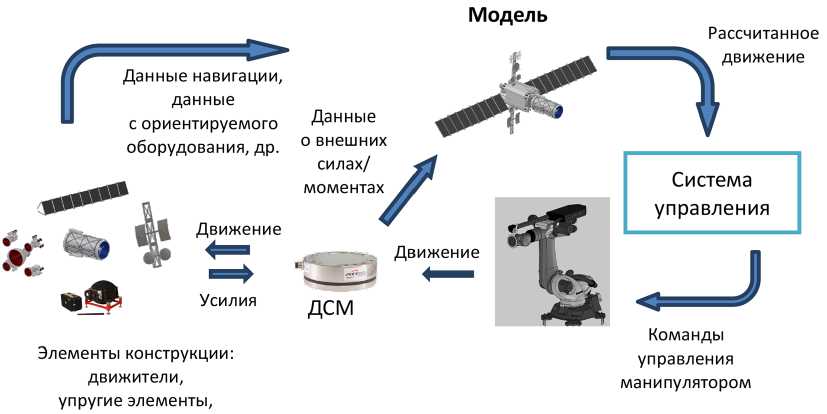
ориентируемое оборудование, др.
Рис. 3. Система полунатурного моделирования КА с применением промышленного манипулятора с датчиком сил и моментов (ДСМ)
Fig. 3. HIL simulation facility for a spacecraft based on an industrial manipulator equipped with a force/torque sensor (FTS)
Первым и обязательным критерием сравнения является возможность моделирования динамики систем твердых тел. Данный критерий не является уникальным, так как составляет суть данных пакетов. Стоит отметить два варианта программной компоновки систем уравнений, учитывающих соединения (жесткие/шарнирные/упругие и др.) тел между собой. Первый вариант связан с введением уравнений связи, накладываемых на взаимные положения тел, и вычислением сил реакции в местах крепления (по примеру, множителей Лагранжа). Каждая такая связь содержит в себе количество уравнений (а, следовательно, и степеней свободы), равное числу степеней подвижности между двумя (или более) телами, которые оно ограничивает. Данный метод является универсальным и применяется в большинстве систем моделирования. Второй метод связан (в большей степени) с кинематическими цепями (последовательностями звеньев, соединенных шарнирами), положения звеньев которых связаны не ограничениями в виде уравнений связи, а параметром (углом/расстоянием), определяющим их взаимное расположение. Данный метод является более экономичным в плане полного количества уравнений и скорости вычисления. Он имеет эффективную реализацию на базе алгоритма Ньютона-Эйлера (и его модификаций) и применяется преимущественно в робототехнике.
Вторым критерием, обязательным для моделирования больших и гибких конструкций, является возможность моделирования упругих тел. Большинство современных пакетов включают, в той или иной степени, возможность моделирования упругих элементов.
Самыми распространенными являются аппроксимации в форме линейных пружин и тор-сионов, а также специальные виды упругих элементов (типа стержней, пластин, др.), алгоритмы построения матриц масс и жесткости которых известны и имеют простую реализацию. Такими элементами аппроксимируются части моделируемого объекта, что оказывается достаточным приближением динамики объектов с простой геометрической формой и однородным составом.
Наиболее общим и точным методом является метод конечно-элементного моделирования (КЭМ). С его помощью можно моделировать динамику объектов сложной геометрической формы и составных объектов, динамика которых плохо аппроксимируется простыми приближениями. Основной проблемой КЭМ является большое количество степеней свободы, требующее вычислительных ресурсов, несовместимых с выполнением в реальном времени. Решение данной проблемы частично возможно за счет применения методов редуцирования (см., например, [13, 14]), позволяющих сократить размерность модели, сохранив существенный для задачи характер динамических процессов. Качество редукции является отдельной сложной проблемой и не рассматривается здесь. Стоит только отметить, что для нее необходимо учитывать условия закрепления и нагружения механического элемента, и сам процесс требует хороших инженерных знаний со стороны разработчика модели. Редуцированные КЭМ необходимы для обеспечения требуемого быстродействия при построении системы полунатурного моделирования.
Следующим ключевым критерием является состав решателей (программных модулей, предназначенных для вычисления определенного типа задач). Все системы моделирования динамики имеют так называемый динамический решатель, который составляет и интегрирует уравнения движения. При корректно определенной модели и начальных условиях этого достаточно для использования в системах полунатурного моделирования. Однако большая часть реальных объектов имеют сложную конфигурацию сопряжений и начальных условий, выполнение которых сложно (невозможно) задать заранее. Невыполнение условий связи (например, неправильное начальное взаимное положение тел) или других начальных условий может привести к неустойчивости моделирования и катастрофическим расхождениям с реальными физическими процессами. В мажоритарных коммерческих пакетах моделирования данная проблема решается «запуском моделирования из установившегося состояния» (“launch from steady state”). Такое состояние модели решается предварительным статическим моделированием, в ходе которого из системы исключаются все динамические эффекты (в основном массоинерционные) и решается задача статического нагружения и согласования условий связи между телами. За это отвечает статический решатель, наличие которого также требуется в пакете моделирования.
Последняя группа критериев связана с интегрированием пакетов моделирования в инфраструктуру системы полунатурного моделирования. К ним относятся: языки программирования для интеграции пакета, наличие графического интерфейса для настройки и редактирования, визуализация процессов моделирования, программный интерфейс с внешними модулями/ПО, исполнение в реальном времени (наличие готовых механизмов, функциональная возможность доработки), взаимодействие с пользователем (в процессе моделирования), качество документации и наличие поддержки разработчиков.
Отдельно следует рассмотреть возможность исполнения в реальном времени. Она в первую очередь определяется вторым и третьим критериями, в значительной степени определяющими быстродействие. Однако вопрос возможности выполнения в реальном времени не заканчивается на времени расчета одного шага. В пакете должна быть предусмотрена возможность выполнения одного шага интегрирования, а также возможность получения текущего вектора состояния во время моделирования. Некоторые пакеты (например, MBDyn [15]) могут иметь встроенные механизмы исполнения и обмена данными в системах реального времени.
В табл. 2 приведен список рассматриваемых пакетов с существенными характеристиками для сравнения. Приняты следующие общие обозначения: КД – кинематическое дерево, УС – уравнения связи, UI – графический интерфейс (user interface), Build-in – визуализация процессов встроена в графический интерфейс, «возможно» – обозначает возможность внедрения собственного функционала для реализации, «н/д» – об этой возможности явно неуказано в документации пакета, примитивы (П) – конечные элементы типа стержней, пластин, т.п., которыми можно аппроксимировать целые элементы конструкций. Качество документации оценивается по двум критериям: качество описания теоретической базы (0–5) и качество документирования API, – в табл. 2 представлено в формате «<качество описания теоретической базы>/<качество документирования API>». Численные решатели по задачам обозначаются: Л – линейный (линейное приближение моделей динамики), С – статический (решение статических задач методом Ньютона или другим), Д – динамический (решение полноценных задач динамики), «внешний» – подключаемый или используемый сторонний решатель. Некоторые особенности пакетов, не вошедшие в таблицу сравнения, приведены ниже.
Exudyn
Python-библиотека на основе C++ с открытым исходным кодом для упругой многотельной динамики. Хотя в Exudyn декларируется представление динамики в форме кинематических деревьев, по факту происходит только сборка уравнений по принципу связывания звеньев цепи шарнирами друг с другом, а в решателе реализуется парадигма уравнений связи (таким образом, общая размерность системы оказывается достаточно высокой). Библиотека позволяет импортировать внешнюю сетку и строить конечно-элементную модель внутри самого пакета, или же импортировать готовые матрицы масс и жесткости (вместе с координатами узлов сетки) из Abaqus, Ansys, NetGen. Exudyn имеет встроенное взаимодействие с библиотекой работы с КЭМ и сеткопостроителя NGSolve/NetGen, позволяющее использовать их как сторонний решатель. Основное ограничение Exudyn заключается в росте размерности модели с ростом числа уравнений связи между телами.
MBdyn
Библиотека с открытым исходным кодом для упругой многотельной динамики, не имеющая своей графической оболочки и конфигурируемая текстовым файлом со специальным форматированием. MBdyn обеспечивает комплексное моделирование многотельных систем, включая нелинейную механику жестких и гибких тел, подверженных кинематическим ограничениям, наряду с электрическими системами, активным управлением, гидравлическими системами, а также аэродинамику самолетов и винтокрылых машин. Визуализация через плагин для Blender-3d [16] позволяет с помощью графического интерфейса очень гибко настроить отображения результатов моделирования. MBdyn имеет эффективный собственный решатель, что позволяет запускать его в системах жесткого реального времени (авторы предлагают использование RTAI[17]). MBdyn поддерживает упругие тела в форме импортируемых редуцированных матриц масс и жесткости, а также координат интерфейсных точек. Готовый импорт доступен из Nastran и Aster либо из любого другого FEA путем написания собственного конвертора форматов. Доступны также готовые гибкие элементы в форме ба-
Таблица 2. Сравнение пакетов моделирования динамики
ChronoProject
Современный пакет моделирования многотельной и упругой динамики, ориентированный на моделирование движения транспортных средств по различным грунтам и водной среде. Пакет поддерживает импорт КЭМ из Ansys, Abaqus и TetGen (при внутренней генерации матриц масс и жесткости), а также широкий набор готовых упругих элементов (балки, пластины, пружины, др.). ChronoProject может использовать MBdyn в качестве внешнего решателя, однако их взаимное конфигурирование является достаточно сложной задачей. ChronoProject является нестабильным при ручном формировании КЭМ, а его встроенный динамический решатель не обладает достаточным быстродействием даже на относительно маленьких редуцированных КЭМ. Проект активно поддерживается, но плохо документирован. Стабильность работы можно ожидать только от конфигураций, похожих на представленные в примерах.
Drake
Набор инструментов анализа динамики роботов и создания систем управления для них с особым упором на проектирование/анализ на основе решений численных задач оптимизации, реализованный на языке С++. Drake прост в использовании (этот проект начинался как программа для обучения студентов) и имеет широкий спектр программ, к которым его можно подключить. Описание динамических систем вдохновлялось подходом Simulink, в Drake заранее встроены средства импорта моделей из ROS, MuJoCo и Matlab/Simulink. Drake имеет большой инструментарий для работы с FEM и решения математических задач, гибко настраивается и легко расширяется. Проект активно развивается, хорошо задокументирован по части API, но плохо по теоретической части и не имеет обратной совместимости с прошлыми версиями.
Robotran
Программная среда для моделирования и анализа многотельных систем с использованием символьно сгенерированных уравнений. Robotran представляет собой сборку из нескольких модулей: MBsysPAD – графический редактор для составления «топологии» системы и отрисов-ки 3D-модели, MBsysTran – символьный транслятор уравнений системы MBsysLab/MBsysC/ MBsysPy – библиотека соответствующего языка для записи символьных уравнений. Отдельного рассмотрения стоит MBsysTran, при его использовании данные о системе отправляются на сервер разработчика для получения символьных уравнений, при этом необходимо подключение к интернету. Разработчики заявляют о возможности расчета систем с несколькими сотнями тел и соединений, но не обеспечивают возможности расчета в режиме реального времени.
MuJoCo
MuJoCo (сокращение от Multi-Joint dynamics with Contact) – это библиотека, написанная под C/C++, предназначена для исследований в области создания роботов и сложных механизмов. Разработчики отмечают, что проект служит для быстрого и точного моделирования сочлененных структур, взаимодействующих с физическим миром. Для описания моделей MuJoCo используют метод комбинирования обобщенных координат с современным расчетом динамики контактов. Кроме робототехники MuJoCo можно применять в области разработки алгоритмов машинного обучения, биомеханических гаджетов и создания 3D-графики. Несмотря на возможность импорта КЭМ из других программ, проект не предоставляет инструментов для их редукции. MuJoCo активно поддерживается, имеет обилие примеров и множество моделей промышленных роботов, заранее подготовленных для симуляции, но в документации слабо описана теоретическая база проекта.
MSC ADAMS
MSC ADAMS – пакет мод моделирования механических систем коммерческого уровня с применением в различных отраслях промышленности (авиация, автомобилестроение, автоматизация, др.) за рубежом. Он предназначен для моделирования динамики и контактных взаимодействий, а также упругих тел, поддерживает взаимодействие с Nastran. ADAMS позволяет управлять процессом моделирования через подключаемую DLL-библиотеку. ADAMS является закрытым коммерческим продуктом, распространяемым под операционные системы Windows. Базовый решатель не позволяет моделировать в реальном времени даже достаточно простые системы, при этом в последних версиях добавлена возможность параллельного моделирования (фактически полунатурного моделирования) в реальном времени специально для автомобильных систем [26].
FreeDyn
Программная среда моделирования динамики многотельных систем, состоящая из пользовательского интерфейса и решателя. Данный пакет может использоваться как в качестве отдельного решения, так и в Matlab, Scilab через программный интерфейс. В FreeDyn встроен CAD-функционал. Проект обновлялся ежегодно до 2020 года, в настоящее время новых версий нет, также почти полностью отсутствует какая-либо документация. Явное указание на возможность моделирования в реальном масштабе времени также отсутствует.
Результаты и обсуждение
Оценить возможность и удобство применения пакета моделирования до его фактического использования в системе является сложной задачей, в первую очередь из-за отсутствия полноценной документации, описывающей его возможности, и единого эталонного способа сравнения пакетов. Тем не менее по некоторым признакам пакет может быть исключен из рассмотрения, без детальной оценки его работоспособности.
Первым критерием для исключения пакета (по крайней мере на текущий момент) следует считать проприетарный, или закрытый код, свойственный в основном коммерческим продуктам. Сам по себе закрытый код не является проблемой в случае его полной работоспособности. Однако с учетом специфики решаемой задачи неизбежны ситуации, в которых модификация тех или иных функций может быть решающей для реализации всей системы. Например, реализация определенной формы представления систем (отсутствующей в пакете) может сильно ускорить моделирование. Кроме того, проприетарное программное обеспечение, как правило, привязано к определенной операционной системе. В силу требования – 1111 – выполнения в реальном масштабе времени не каждая операционная система подходит под задачу. В настоящее время большинство операционных систем реального времени являются представителями семейства Unix. Само семейство Unix не является однородным, один и тот же пакет может не запускаться под разными версиями одного и того же подсемейства операционных систем. Практика программирования диктует необходимость перекомпилирования пакетов (с возможной доработкой) для работы на требуемой версии операционной системы. Таким образом, несмотря на свое высокое качество, проприетарные пакеты оказываются крайне сложными в применении в полунатурном моделировании (во всяком случае без участия их разработчиков). Представленный в предыдущем разделе пакет MSC ADAMS, способный моделировать системы твердых и упругих тел, не может быть запущен в реальном времени (для рассматриваемых систем).
То же требование выполнения в реальном времени приводит к еще одному обязательному требованию к пакету – возможность создания и/или импортирования редуцированных КЭМ. Несмотря на то что в некоторых случаях задача моделирования упругого элемента может быть аппроксимирована его частной формулировкой (например, стержнем или линейной пружиной), называемой «примитивом», в случае сложных конструкций приближение может оказаться недостаточно точным. Рекомендуемым большинством разработчиков пакетов подходом для улучшения точности в этом случае является объединение множества таких примитивов в одну структуру. Такое объединение ведет к улучшению точности ценой быстродействия, так как любые связи, накладываемые на тела в системе, приводят к росту вычислительной сложности. Практическим решением данной проблемы является моделирование упругого элемента в профессиональных КЭМ-пакетах с последующей качественной статической и/или динамической редукцией (в зависимости от задачи). Редуцированная модель уже включает в себя уравнения связи, которые возникают при соединении отдельных тел через уравнения связи, тем самым уменьшает общую размерность системы.
Из рассмотренных выше пакетов только Exudyn, MBDyn и Chrono Project обладают необходимым функционалом. При этом только в MBDyn заявлена возможность параллельной симуляции в мягком и жестком реальном времени. Для данных пакетов приводилось расширенное тестирование, в котором оценивалось:
-
- скорость моделирования,
-
- импорт КЭМ,
-
- редуцирование КЭМ.
Chrono Project показал наихудшие результаты и нестабильность работы, поэтому был исключен из дальнейшего рассмотрения. Exudyn имеет механизм импорта и редуцирования КЭМ, однако существенно органичен в быстродействии. Ограничения связаны в основном с используемыми решателями и встроенным функционалом линейной алгебры. MBDyn показал наибольшее быстродействие на тестовом объекте, дающее возможность моделировать систему в реальном времени. MBDyn обладает только механизмом импорта редуцированных КЭМ без возможности изменять или преобразовывать. В обоих пакетах (Exudyn, MBDyn) для моделирования упругих тел применяется парадигма плавающей системы отсчета (floating frame of reference). Однако в Exudyn реализованы неинерциальные силы, действующие на редуцированную модель (центростремительные, кориолисовы), тогда как в MBDyn моделирование происхо- дит по упрощенной схеме, где этими силами пренебрегают (за счет чего получается ускорение расчета). Несмотря на высокое быстродействие, MBDyn обладает рядом недостатков:
-
– нет явного статического решателя, который можно запустить перед динамическим, что приводит к необходимости формирования очень точной геометрической модели начального расположения всех элементов системы, между которыми имеются связи. Это создает проблемы для построения сложных моделей;
-
– сложность настройки решателей;
-
– отсутствие понятного вывода анализа ошибок настройки и построения модели.
Несмотря на указанные недостатки, MBDyn обладает наилучшим функционалом из рассмотренных пакетов с точки зрения включения его в состав системы полунатурного моделирования.
Заключение
В статье рассмотрено использование сторонних пакетов и библиотек моделирования динамики в задачах полунатурного моделирования. Выделяются основные требования и проблемы, связанные с применением таких пакетов: размерность и вычислительная сложность, удобство интеграции в систему, способы представления моделей, импорт и работа с КЭМ. Был проведен обзор и сравнение пакетов моделирования из открытых источников, потенциально подходящих под задачу.
Основное и главное требование к пакету моделирования в рамках данного исследования заключается в возможности моделировать динамику упругих тел и древовидных кинематических цепей в реальном масштабе времени. Данное требование является очень жёстким, и ни один из рассмотренных открытых и/или общедоступных проектов не может в полной мере ему соответствовать. Однако некоторые из них имеют возможности модификации и расширения для приближения к желаемым характеристикам быстродействия. Среди рассмотренных пакетов наиболее близкими функциональными возможностями к требуемым обладает пакет MBDyn. Он обладает высоким быстродействием, способен включать КЭМ модели упругих элементов наравне с динамикой систем твердых тел, имеет качественную документацию и открытый исходный код. Это единственный (из рассмотренных) пакетов, для которого в явном виде заявляется работа в реальном времени. Среди недостатков следует выделить отсутствие графического интерфейса для построения моделей, что приводит к высокой сложности разработки больших систем.
Общей проблемой (в рамках исследования) для всех пакетов является большая вычислительная сложность при работе с упругими элементами. Вычислительная сложность особенно сильно проявляется при работе со сборками из твердых и упругих элементов, даже при использовании редуцированных моделей последних. Она связана в первую очередь со способом задания взаимного положения тел в парадигме уравнений связи. Так, для сложных конструкций (даже использующих редуцированные модели гибких элементов) размерность вектора состояний и общая вычислительная сложность, связанные с увеличением числа связей, для определенного типа конструкций (например, стержневых) могут начать доминировать над вычислительной сложностью, связанной с отдельным гибким элементом. Универсального решения данной проблемы в рамках данного исследования обнаружено не было. Таким образом, дальнейшее направление исследований – поиск архитектурных решений, позволяющих создавать сложные модели динамики, обладая при этом достаточным быстродействием.
Список литературы Моделирование динамики систем твёрдых и упругих тел: обзор пакетов моделирования
- Akin D., Minsky M., Thiel E., and Kurtzman C. Space applications of automation, robotics and machine intelligence systems (aramis) – phase II. NASA Contractor report 3734, 1983.
- Coppa A. P. Robotic assembly of truss beams for large space structures. Journal of Spacecraft and Rockets, 1995, 32(4), 680–685. doi:10.2514/3.26669
- Mangalgiri V. S. Analysis for robotic assembly of large flexible space structures. Thesis (S.M.), Massachusetts Institute of Technology, Dept. of Mechanical Engineering, 2004.
- Oda M., Kibe K., and Yamagata F. ETS-VII, space robot in-orbit experiment satellite. Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), 1996, 739–744.
- Coleshill E., Oshinowo L., Rembala R., Bina B., Rey D., and Sindelar S. Dextre: Improving maintenance operations on the International Space Station. Acta Astronautica, 2009, 64, 869–874
- Friend R. Orbital Express program summary and mission overview. Proc. of SPIE, Sensors and Systems for Space Applications II, 2008
- Artigas J., De Stefano M., Wolfgang R., Lampariello R., Brunner B., Bertleff W. et al. The OOS-SIM: An on-ground simulation facility for on-orbit servicing robotic operations. Proceedings – IEEE International Conference on Robotics and Automation, 2015, 2854–2860. doi: 10.1109/ICRA.2015.7139588.
- Eberle S., Faller R., Ohndorf, A. On-Orbit Servicing Mission Operations at GSOC. SpaceOps 2010 Conference, 2010, doi:10.2514/6.2010–1975
- Benninghoff H., Rems F., Risse E.-A., Mietner C. European Proximity Operations Simulator 2.0 (EPOS) – A Robotic-Based Rendezvous and Docking Simulator. Journal of large-scaleresearch facilities, 3, A107, 2017. doi: 3. 10.17815/jlsrf‑3–155.
- Flores-Abad A. Ma O. Pham K., Ulrich S. (2014). A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, 68, 1–26. doi: 10.1016/j.paerosci.2014.03.002.
- Oshinowo L. et al. On the Application of Robotics to On-Orbit Spacecraft Servicing-The Next Generation Canadarm Project. Proc. 11th Intl. Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS), 2012, 3–7
- Ueta A., Oda M. A Ground-Based Operation System for EVA Support Robot Experiments. 2010, Retrieved – Access: http://robotics.estec.esa.int/i-SAIRAS/isairas2010/PAPERS/093–2737-p.pdf
- Craig R., Bampton M. C. Coupling of Substructures for Dynamic Analysis. AIAA Journal, 1968, 6(7). 1313–1319. doi:10.2514/3.4741
- Копылов В.М., Титов В. В. Методика синтеза и применения динамической модели робота, оснащенного упругими манипуляторами. Экстремальная робототехника. Труды 34-й Международной научно-технической конференции «экстремальная робототехника», 2023. 326–331/ doi: 10.31776/ConfER.34.2023 [Kopylov V. M., Titov V. V. Synthesis and application of dynamic model of robotic system with flexible manipulators. Proceedings of the 34th International Scientific and Technological Conference «Еxtreme robotics», 2023. 326–331. doi: 10.31776/ConfER.34.2023]
- MBDyn. Mbdyn website. [Electronic resource] – Access: https://www.mbdyn.org
- Blender. Blender website [Electronic resource] – Access: https://www.blender.org
- RTAI. RTAI website [Electronic resource] – Access: https://www.rtai.org
- EXUDYN. Exudyn source code repository [Electronic resource] – Access: https://github.com/jgerstmayr/EXUDYN
- PROJECT CHRONO. An open source multi-physics simulation engine [Electronic resource] – Access: https://projectchrono.org
- Drake. Model-Based Design and Verification for Robotics engine [Electronic resource] – Access: https://drake.mit.edu/
- MuJoCo. Advanced physics simulation engine [Electronic resource] – Access: https://mujoco.org
- Robotran. Robotran website [Electronic resource] – Access: https://www.robotran.be
- RECURDYN. Recurdyn website [Electronic resource] – Access: https://functionbay.com/en
- Adams. The multibody dynamics simulation solution [Electronic resource] – Access: https://hexagon.com/products/product-groups/computer-aided-engineering-software/adams
- FreeDyn. Freedyn website. [Electronic resource] – Access: http://www.freedyn.at
- Adams Real Time. Perform software-in-loop (SIL), hardware-in-loop (HIL) and advanced driver assistance systems (ADAS) co-simulations with Adams for reduced prototyping [Electronic resource] – Access: https://hexagon.com/products/adams-real-time
