Моделирование движения быстроходной гусеничной машины с автоматическим переключением передач в планетарной коробке

Автор: Кондаков Сергей Владимирович, Хорошилов Сергей Николаевич, Павловская Ольга Олеговна
Рубрика: Численные методы моделирования
Статья в выпуске: 2 т.20, 2020 года.
Бесплатный доступ
Одним из важнейших показателей маневренности быстроходной гусеничной машины является время разгона до определенной скорости. На время разгона влияет много факторов: удельная мощность двигателя, сцепные свойства грунта; разбивка передаточных чисел в коробке передач; квалификация человека, управляющего машиной и переключающего передачи вручную, или алгоритм автоматического переключения передач, если машина оборудована автоматической трансмиссией. Объектом исследования в данной статье является моделирование движения гусеничной машины при разгоне с переключением передач «снизу вверх». Математическая модель необходима для отработки алгоритмов управления коробкой передач и оптимизации с ее помощью ряда целевых функций: минимального времени разгона, минимальной работы буксования управляющих фрикционных устройств, максимального использования мощности двигателя, сцепных свойств грунта, минимального расхода топлива. В различных условиях целесообразно оптимизировать алгоритм переключения по разным критериям (из перечисленных). Научной новизной является развитие математической модели движения быстроходной гусеничной машины в части описания работы фрикционных управляющих устройств, тормозов и фрикционов, фиксирующих те или иные основные звенья планетарных механизмов, из которых состоит коробка передач исследуемой машины. В частности, определены моменты, передаваемые фрикционами во включенном состоянии, после окончания буксования. Этот метод предложен Ю.В. Беренгардом и успешно использован авторами для математического описания не только фрикционов, но и тормозов, которые останавливают эпициклы планетарных механизмов первой и второй передач. Интерес представляют новые возможности моделирования: во-первых, не требуется изменения структуры математической модели в буксующем состоянии и во включенном, и во-вторых, модель позволила правильно описывать работу фрикциона при перегрузке по моменту - теперь он пробуксовывает и вновь замыкается после снятия внешней перегрузки.
Планетарная коробка передач, солнце, водило, эпицикл, фрикцион, тормоз, переключение передач, время разгона
Короткий адрес: https://sciup.org/147233477
IDR: 147233477 | УДК: 629.114.2 | DOI: 10.14529/engin200205
Modeling the motion of high-speed tracked vehicle with automatic transmission of gears in a planetary box
One of the most important indicators of the maneuverability of a high-speed tracked vehicle is the acceleration time to a certain speed. Many factors influence the acceleration time: specific power of the engine, adhesion properties of the soil, breakdown of gear ratios in the gearbox, qualification of the person driving the machine, and manual gear shifting, or the automatic gear shift algorithm if the machine is equipped with an automatic transmission. The object of research in this article is the modeling of the movement of a tracked vehicle during acceleration with gear shifting from the bottom up. A mathematical model is necessary for testing transmission control algorithms and optimizing with it a number of objective functions: minimum acceleration time, minimum slipping operation of control friction devices, maximum use of engine power, coupling properties of the soil, minimum fuel consumption. In various conditions, it is advisable to optimize the switching algorithm according to different criteria (from the above). A scientific novelty is the development of a mathematical model of the motion of a high-speed tracked vehicle in terms of describing the operation of friction control devices, brakes and friction clutches that fix certain basic links of planetary mechanisms that make up the gearbox of the vehicle under study. In particular, the moments transmitted by the clutches in the on state, after the end of slipping, are determined. This method was proposed by Berengard Yu.V. and successfully used by the authors for the mathematical description of not only friction, but also the brakes that stop the epicycles of the planetary mechanisms of first and second gears. New modeling capabilities are of interest: firstly, the structure of the mathematical model does not need to be changed in the stalled state and when it is on, and secondly, the model allowed us to correctly describe the friction clutch operation in case of moment overload - now it stalls and closes again after removing the external overload.
Текст научной статьи Моделирование движения быстроходной гусеничной машины с автоматическим переключением передач в планетарной коробке
Актуальность. В современных колесных и гусеничных транспортных машинах широкое применение получили автоматические коробки передач (АКП) [1–5], имеющие бесспорные преимущества перед так называемой «механикой», то есть коробками, в которых переключение передач осуществляется вручную. Типы, устройство, преимущества и недостатки АКП хорошо освещены в работах [6–8]. Наряду с этим найти информацию об алгоритмах управления передачами в АКП практически невозможно. В лучшем случае приводятся результаты тестовых сравнительных испытаний АКП той или иной фирмы, в которых алгоритмы обозначены аббревиатурами, и не более того [9, 10]. А ведь именно алгоритм работы устройств, управляющих переключением передач, определяет эксплуатационные свойства машины и в конечном счете увеличивает маневренность/подвижность быстроходной гусеничной машины (БГМ).
Целью является моделирование переключения передач в коробке передач (КП) БГМ, направленное на исследование влияния различных параметров движения (скоростей, нагрузок, управ- ляющих действий человека) на эксплуатационные свойства машины, в частности минимизации времени разгона, уменьшения работы буксования управляющих фрикционных устройств, максимально возможного использования сцепных свойств грунта и мощности двигателя внутреннего сгорания (ДВС).
Кинематическая схема трансмиссии исследуемой БГМ приведена на рис. 1. Трансмиссия состоит из гидродинамического трансформатора крутящего момента (ГТ), механизма реверса, планетарной коробки передач (ПКП), гидрообъёмной передачи механизма поворота, вала подкрутки, суммирующих планетарных механизмов (СПМ) и бортовых редукторов.
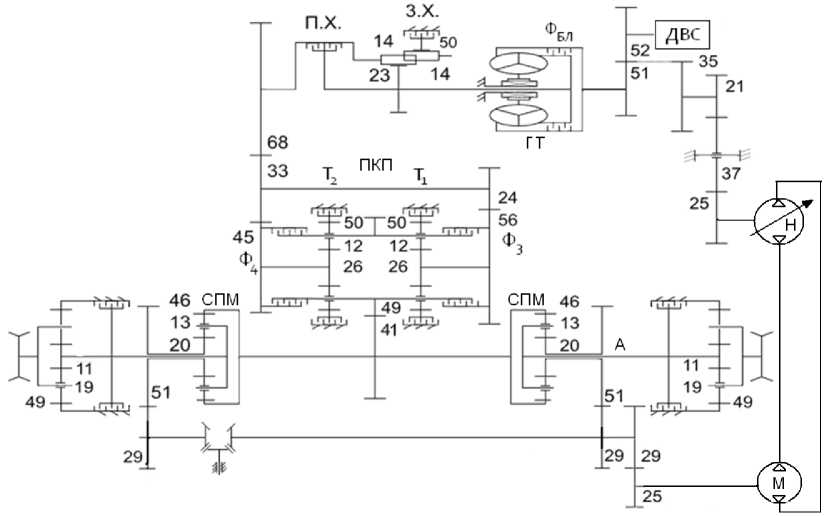
Рис. 1. Кинематическая схема трансмиссии
ПКП состоит из двух одинаковых планетарных механизмов (ПМ) с одновенцовыми сателлитами и четырёх управляющих фрикционных устройств. Первая передача обеспечивается включением тормоза Т 1 , вторая – тормозом Т 2 , третья – фрикционом Ф 3 , четвертая – фрикционом Ф 4 . Кинематический анализ, проведенный по методике [11], показал, что передаточные числа ПКП по передачам равны 3,31; 1,93; 1,13; 0,66. Блокировка ГТ осуществляется блокировочным фрикционом Ф БЛ .
Математическая модель. При включении первой передачи работает тормоз Т 1 , останавливая
эпицикл правого ПМ. До начала движения, когда машина стоит на месте, водило, общее для обоих
ПМ ПКП, остановлено, а эпицикл вращается вхолостую. Появление тормозного момента на эпицикле приводит к появлению моментов на солнечной шестерне, которая зубчатыми передачами
жестко связана с турбиной ГТ, и на водиле, связанном, в свою очередь, с ведущими колесами.
Система дифференциальных уравнений, описывающая данную ситуацию, имеет вид:
d ® C 26 dt
( M Т i Kn M C 26 ) / J 2
d ^ 3CnM dt
M ВПКП
к
—
( P + P 2 R 1
iБР КСПМ у
/ J 3
где Ю С26 - частота вращения солнца Z = 26, пропорциональная частоте вращения турбины ГТ, р/с; M – крутящий момент на турбине ГТ, Н·м; i – передаточное число третьей передачи КП, равное 68 *24 (дело в том, что передаточное число на первой передаче формируется этим же 33 56
набором шестерен и правым ПМ с остановленным эпициклом, а на третьей передаче этот же ПМ заблокирован и не преобразует крутящий момент и передаточное число равно именно
68 *24 = из; Мсгь - крутящий момент на солнечной шестерне правого ПМ в КП, Нм; J^, J3 -33 56 , моменты инерции масс, соединенных жестко с турбиной ГТ и выходом КП соответственно, указанные массы соединяются при включении какого либо фрикциона или тормоза в КП, кг·м2; юэспм - частота вращения эпицикла СПМ, р/с; Мвпкп - крутящий момент на водиле ПМ ПКП, он же -момент на выходе ПКП, Н-м; (р + P2) - сумма сил тяг на ведущих колесах, Н; RBK - ра- диус ведущего колеса, м; iБР – передаточное число бортового редуктора, б/р; K – кинемати- ческий параметр СПМ, б/р.
Моменты на солнце Z = 26 и на водиле обеспечиваются на первой передаче тормозом T 1 , останавливающим эпицикл правого ПМ ПКП. Связь между ними устанавливают уравнения:
M С 26 =
MТ 1
К ПМ
_ M т 1 ( К пм + 1 ) ВПКП — т/.
К ПМ
Тормозной момент M формируется гидравлической системой и подчиняется системе урав- нений:
мтх (t - t 0 )
Т 1 max T ВКЛ
( t - t o )
M Т 1
- ‘ M Т 1max О M Т 1max - M Т 1max ,
T ВКЛ
0 О t - 1 0
где t – текущее время, с; t 0 – начало включения соответствующего тормоза, с; T – время включения тормоза, с; MТ 1max – максимальный момент тормоза, соответствующий максимальному давлению в системе управления, Н·м.
На второй передаче включается тормоз Т 2 , останавливающий эпицикл левого ПМ ПКП, тогда в системе уравнений (1) iКП – это передаточное число четвертой передачи КП. Уравнения (2), (3) и система (4) точно такие же, только вместо Т 1 участвует Т 2 .
Во включенном состоянии тормоз нагружен переменным моментом, зависящим от момента ДВС, момента сопротивления и моментов инерции масс в данной двухмассовой системе. Задача определения момента тормоза Т 1 (Т 2 ) отличается от ранее сформулированных и решенных в [12] тем, что тормоз, в отличие от фрикциона (в виде сцепления автомобиля, или фрикционов третьей и четвертой передач в ПКП рассматриваемой БГМ), придает эпициклу нулевую скорость. При этом скорости солнца и водила связаны уравнением кинематических связей [11]:
-
(1 + Kпм )Юв — юс + KПМ юэ ,
В принятых в статье обозначениях скоростей:
-
(1 + KПМ )ЮЭСПМ - ЮС26 + KПМ ЮЭ50 ,
где Ю Э 50 - частота вращения эпицикла ПМ ПКП, которую обнуляет тормоз при включении 1 или 2 передачи.
Продифференцируем уравнение (6) по времени:
Л dm3CnM d^c26 .
-
(1 + Kпм )--j= j— + K пм —j—.
dt dtdt
При остановленном тормозе d®^cr\
-
ЮЭ50 =0; "T =0,
dt поэтому
П \ dю ЭCПМ _ d ro C 26
-
(1 + K ПМ )---T---- ,, .
dtdt
Левые части уравнений (1) можно приравнять с учетом соотношения (9):
M Т iKП V
—
M
К пм 7
/ J 2 = (1 + K пм )
Г Mт 1 ( К пм + 1 ) ( P + P 2 ) R bk )
К
V К пм
iБР K СПМ 7
/ J 3 ,
и вычислим величину момента на тормозе во включенном состоянии:
J 3 M т i КП + J 2 ( К ПМ
MТ 1
+ 1) ( P + P 2 ) R bk i БР K СПМ
J 3 + ( К пм + 1 ) 2
K ПМ K ПМ
Итак, система (4) описывает момент тормоза Т 1 при включении (пробуксовке), а выражение (11) – при полностью включенном тормозе. Условия (алгоритм) перехода от буксования к включенному состоянию и обратно, сформулированы в работе [12].
При работе на 3-й и 4-й передачах фрикционы Ф 3 или Ф 4 напрямую соединяют солнечные шестерни Z = 26 c водилом, то есть с выходным валом КП. На этих передачах фрикционы работают в точности как сцепление автомобиля, правда, установленного после КП. Передаточные числа КП на третьей передаче близки к 1, поэтому такая установка сцепления допустима, а на четвертой передаче передаточное число КП меньше 1, что делает условия работы фрикциона комфортными:
d ® c 26 dt
= ( M т 1 кп MФ 3 ) / J 2
d ® ЭСПМ dt
M Ф 3 —
V
( P 1 + P 2 ) R BK i БР K СПМ

Во включенном состоянии фрикцион передает момент, равный:
M Ф 3
J M i ( P 1 + P 2 ) RBK
J 3 M Т i кп + J 2
i БР K СПМ
J 3 , J ( Кпм + 1 )
K ПМ K ПМ
Имитационное моделирование проведено в среде программирования VISSIM. Задачей имитационного моделирования является получение достоверных результатов по разгонным качествам БГМ, согласующихся с имеющимися результатами испытаний опытного образца. В дальнейшем математическую модель предполагается использовать в вопросах оптимизации алгоритмов переключения передач.
Трогание с места на 1 передаче начинается в момент времени t = 2 с. По рис. 2 видно, что разгон на 1 передаче происходит в течение 2 с, до скорости грузового вала 700 об/мин. Грузовой вал на кинематической схеме рис. 1 обозначен буквой А.
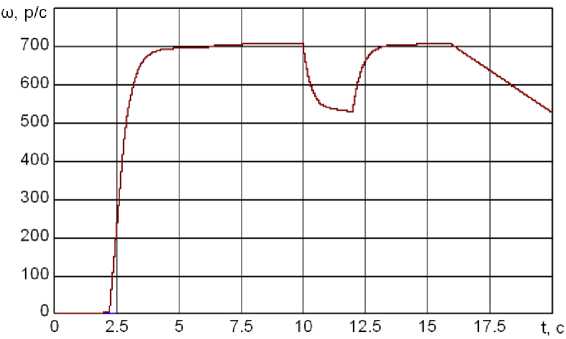
Рис. 2. Частота вращения грузового вала при трогании с места и при появлении дополнительного сопротивления между 10 и 12 с
Кондаков С.В., Хорошилов С.Н., Моделирование движения быстроходной гусеничной Павловская О.О. машины с автоматическим переключением…
Иллюстрация поведения БГМ в случае перегрузки по моменту на ведущих колесах, когда должен пробуксовывать фрикцион, в данном случае тормоз Т 1 , приведена на рис. 3. Рис. 3 иллюстрирует возможности математической модели достоверно описывать не только процесс включения фрикциона, но и пробуксовку в случае возниковения чрезмерных нагрузок со стороны ведущих колес. Здесь на 10-й секунде движения возникает большое сопротивление на ведущих колесах, например наезд на препятствие, при котором момент на тормозе Т 1 превышает его возможности. Тормоз пробуксовывает, а после преодоления препятствия на 12-й секунде снова замыкается.
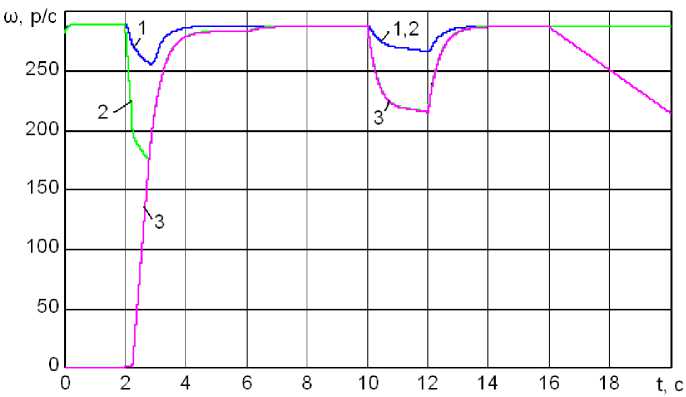
Рис. 3. Скорости насоса (1) ГТ, турбины (2) ГТ и водила ПКП (выходного вала ПКП) (3), приведенной к турбине ГТ
На рис. 4 – скорости эпицикла, солнца и водила правого ПМ ПКП в процесс трогания машины с места. Эпицикл на 2-й секунде расчёта начинает останавливаться тормозом Т 1 . Видно, что период торможения эпицикла тормозом Т 1 делится на два этапа: сначала интенсивно притормаживается солнечная шестерня, а вместе с ней турбина ГТ и коленчатый вал ДВС, и только потом, через 0,2 с начинается вращение водила и связанных с ним масс, включая массу машины, то есть начинается движение машины. Это вполне объясняется соотношениями моментов в ПМ и моментами инерции, связанных с водилом и солнечной шестерней масс.
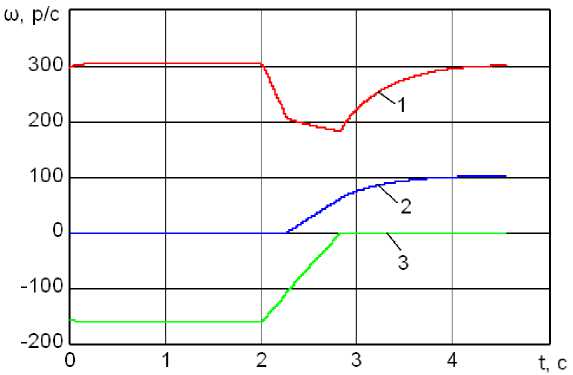
Рис. 4. Скорости вращения солнца (1), водила (2) и эпицикла (3) правого ПМ ПКП при трогании с места на 1 передаче, р/с
Отдельный вопрос моделирования – это блокировка ГТ. Вопросы блокировки ГТ рассмотрены в работе [13]. При блокировке ГТ включается блокировочный фрикцион ФБЛ, работа которого описана в математической модели аналогично другим фрикционам и тормозам. На рис. 5 показаны кинематические параметры, а на рис. 6 - силовые, характеризующие блокировку ГТ. Хорошо видно (см. рис. 6), что после включения тормоза Т1 первой передачи в ПКП (t = 3,5 с) моменты на насосе и на турбине ГТ равны и составляют 100 Н-м, а на 6-й секунде ГТ блокируется и моменты обнуляются. Весь поток мощности идет через блокировочный фрикцион ГТ. При появлении дополнительного сопротивления ГТ разблокируется (между 10-й и 12-й с, на рис. 6).
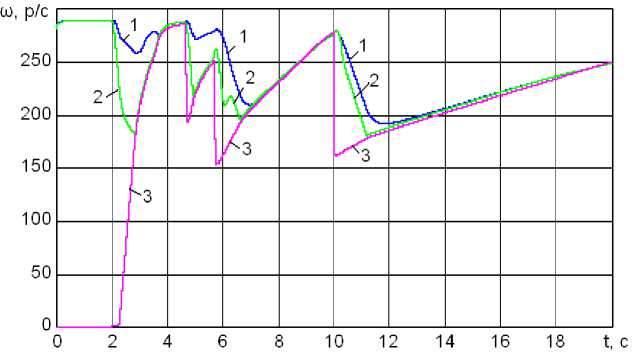
Рис. 5. Скорость вращения коленчатого вала ДВС (1), турбины ГТ (2) и выходного вала ПКП ((3), в том числе в периоды блокировки ГТ
На рис. 5 показана блокировка ГТ на 1-й передаче между 4-й и 5-й с движения, на 3-й передаче на 7-й с движения и на 4-й передаче начиная с 12-й с. Есть особенности описания блокировочного фрикциона ГТ в отличие от описанных выше фрикционов и тормозов ПКП. Дело в том, что Ф БЛ работает параллельно лопастной системе ГТ:
Мф = M 5BC
ФБЛ
—
M Н J 2 — ( M т — M Ф пкп J 1
J 1 + J 2 ’
где J - момент инерции коленчатого вала ДВС и жестко связанным с ним насосом ГТ; Mфпкп - крутящим момент, передаваемый фрикционом ПКП.
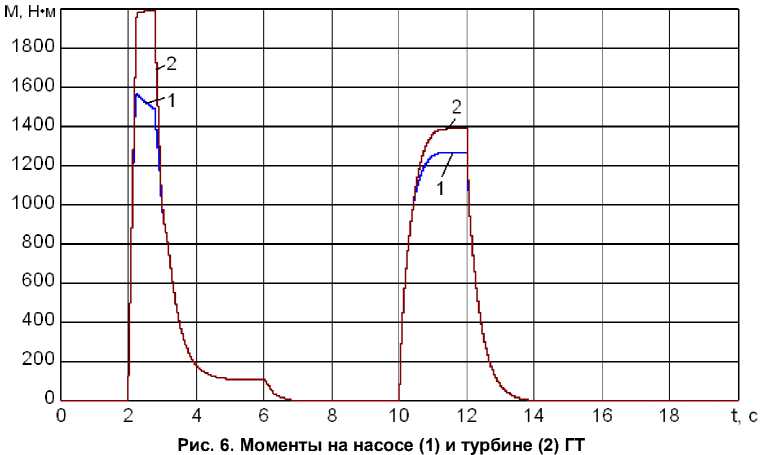
Графики на рис. 6 показывают, что момент, передаваемый лопастной системой, при блокировке ГТ обнуляется. Моменты на насосе и турбине ГТ становятся равными нулю.
Моделирование переключения передач . Алгоритм переключения передач показан на блок-схеме рис. 7. Задано время включения первой передачи и переключений на следующие передачи «снизу вверх». Продолжительность выключения предыдущей передачи 0,1 с и включения следующей тоже 0,1 с. Длительность переключения без перекрытия составляет 0,2 с.
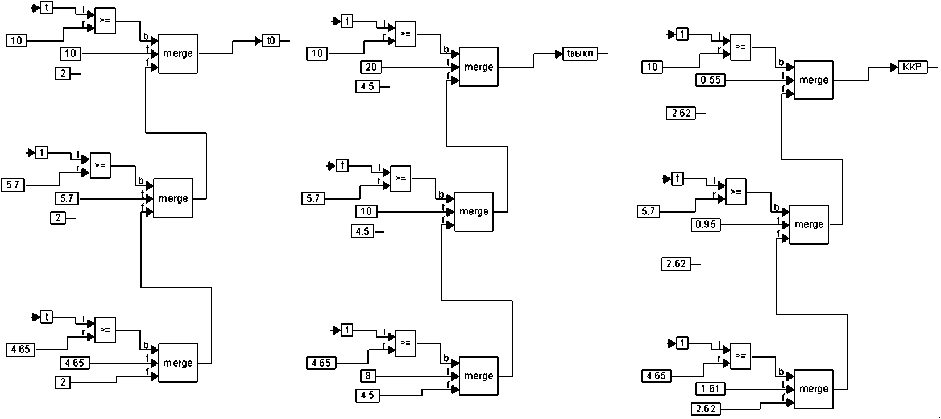
Рис. 7. Алгоритм переключения передач
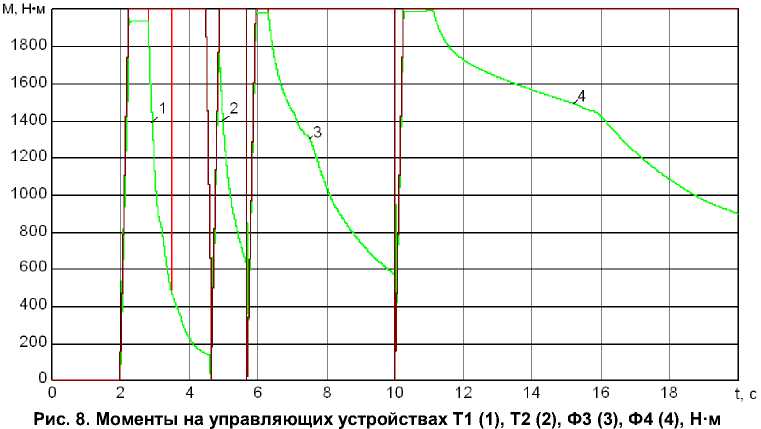
На рис. 8 – моменты тормозов и фрикционов при переключении всех передач. Следует отметить, что вопросам переключения передач в ПКП посвящены работы [14–19], в которых сформулированы условия, благоприятные для переключения передач, которыми мы воспользуемся в нашем исследовании. Однако описание работы фрикционных устройств во включенном состоянии в этих работах неверно в той части, когда фрикцион не буксует. В работе [16] после выравнивания скоростей ведущих и ведомых дисков момент фрикциона остается на максимальном уровне, а на самом деле он резко уменьшается, как проиллюстрировано на рис. 8.
Здесь на каждой из передач моменты на тормозах и фрикционах проходят три цикла: рост до максимального значения, максимальное значение 2000 Н·м, потом снижение в соответствии с уравнением (13).
Экспериментальные результаты, полученные при испытании БГМ [20], приведены на рис. 10. Движение БГМ в эксперименте начинается с t = 0 c, а в математической модели – с t = 2 c. Для сравнения результатов моделирования и эксперимента проведена их статистическая обработка: в табл. 1 и 2 – скорость вращения грузового вала (рис. 9, и график 1 рис. 10) и коленчатого вала ДВС (рис. 11 и график 2 рис. 10) соответственно.
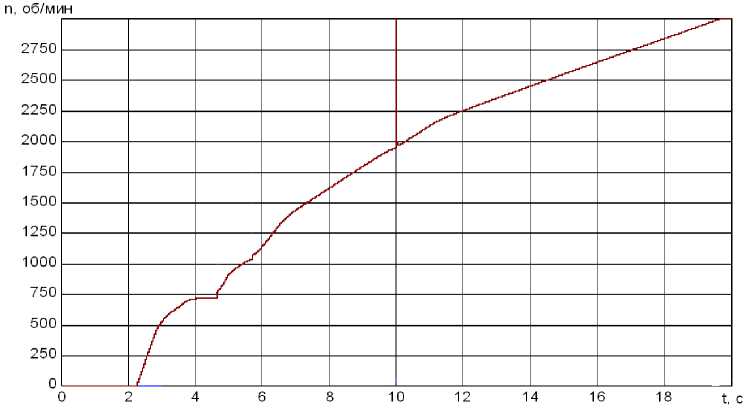
Рис. 9. Частота вращения грузового вала при переключении всех четырех передач
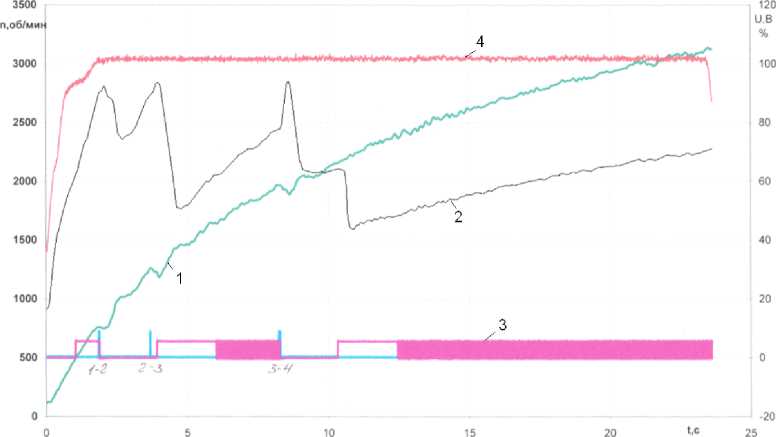
Рис. 10. Результаты экспериментальных исследований. Разгон в режиме АПП с 1-й по 4-ю передачу при полной подаче топлива: 1 – скорость грузового вала; 2 – частота вращения коленчатого вала ДВС;
3 – периоды блокировки ГТ; 4 – положение педали подачи топлива, %


|
04 Ф J X ID Ф 1- z S В о ф z м го о. X о. с о 00 CI га га Z О О 1га 7 Z Ф о к X Z ф ? го о. ш X 1— о о о о |
ОО |
о о ri |
00 00 СП с-1 |
ОО ОО С-1 |
<о сч |
|
>- |
40 *п о С1 |
с-1 |
00 in с-1 |
||
|
40 |
04 |
сг с-1 с-1 |
о с-1 |
О' сч |
|
|
ш |
00 С-1 о-. |
S гч |
сь. СП с-1 |
°C |
|
|
2 |
ОО ОО |
5 о С-1 |
04 о с-1 |
со о” |
|
|
— |
о о 00 |
ОС О- |
со |
С-1г оГ |
|
|
С-1 |
04 |
СП С-1 |
cs |
||
|
О 04 |
40 04 |
С4 o' |
|||
|
о |
о |
О о 00 |
in оГ |
||
|
Ch. |
С-1 СИ |
1П о С-1 |
tn ОО |
^г |
|
|
ОО |
с-1 |
00 о 40 с-1 |
СП С-1 |
^г |
|
|
г- |
С1 |
сч ^-h с-1 |
in |
СП -о |
|
|
4© |
40 о с-1 |
"^t о С-1 с-1 |
ОО |
^ 00 |
|
|
*п |
ос Ch |
04 ЧО |
о in с» Ь е; |
||
|
Tf |
Ш 00 С-1 |
00 о 40 С-1 |
^ й чО О- 2 |
||
|
сп |
С-1 |
in С-1 |
40 С-1 |
«•о § |
|
|
сч |
40 tn 40 С-1 |
с-1 00 40 с-1 |
40 С-1 |
с О I X |
|
|
*—1 |
с-1 ^ m |
40 тГ С-1 |
04 С-1 |
X =о у 00 О. о |
|
|
о |
s’ |
s' |
S < |
Таким образом, можно констатировать, что результаты моделирования и эксперимента различаются по двум важным кинематическим параметрам в пределах 4…8 %.
Важно отметить, что момент ДВС во время разгона используется не полностью. Если бы он все 19 секунд разгона равнялся 1400 Нм, то время разгона было бы существенно меньше. Но это связано с переключением передач, неизбежным в заданной конструкции КП разрывом потока мощности. Одним словом, «провалы» на графике рис. 12 – это очевидный резерв улучшения подвижности БГМ.

Выводы:
-
1. Развита математическая модель движения БГМ с автоматической механической планетарной коробкой передач в части описания работы тормозов и фрикционов. Особенностью математической модели является ее адекватность работе реальных тормозов и фрикционов как без буксования, так и при буксовании в момент включения или из-за перегрузки со стороны ведущих колес, что позволяет с удовлетворительной точностью моделировать все многообразие переходных процессов при переключении передач.
-
2. Построена математическая модель блокировки гидротрансформатора на основе общей модели работы фрикционных устройств.
-
3. Сформулирован алгоритм переключения передач в ПКП, обеспечивающий заданные параметры плавности процесса переключения, а также разрывность потока мощности при переключении передач.
-
4. Получены результаты математического моделирования разгона БМП-3 с переключением передач, определившие рациональный закон переключения передач, обеспечивающий разгон до 50 км/час за 13 с, до 60 км/час за 23 с.
-
5. Проведено сравнение результатов имитационного моделирования разгона БМП-3 с последовательным переключением передач «снизу-вверх» с результатами экспериментальных исследований разгона реальной БМП-3, проведенных в АО «СКБМ» (г. Курган) с участием АО «НПО «Электромашина». Различие не превышает 8 %.
Список литературы Моделирование движения быстроходной гусеничной машины с автоматическим переключением передач в планетарной коробке
- Progress in Automotive Transmission Technology / X. Xu, P. Dong, Y. Liu, H. Zhang // Automotive Innovation. – 2018. – T. 1, №. 3. – С. 187–210.
- Xu, A.F. Study on the gearing scheme of planetary gear train based on improved lever analogy / A.F. Xu, J.M. Jia, N. Liu // J. Mil. Transp. Univ. – 2014. – T. 16(7). – С. 91–95.
- Automated modeling and mode screening for exhaustive search of double-planetary-gear power split hybrid powertrains / X.W. Zhang, H. Peng, J. Sun et al. // San Antonio. Proceedings of the ASME 7th Annual Dynamic Systems and Control Conference, 2014 – 7 с. DOI: 10.1115/DSCC2014-6028
- Design and analysis of a novel multi-speed automatic transmission with four degrees-of-freedom / P. Dong, Y. Liu, P. Tenberge, et al. // Mech. Mach. Theory. – 2017. – Т. 108. – С. 83–96.
- Modeling and Simulation of Gear-Shift Controller for Automated Manual Gearbox Based on Neuro Fuzzy Control Logic / M.M.M. El-Ashwah, W. Abbas, T.M. Farid, M.R.A. Atia // Middle East Journal of Applied Sciences. – 2014. – Т. 4(4). – С. 1000–1006.
- Военные гусеничные машины: учебник. Т. 1: Устройство. Кн. 2 / под ред. В.С. Старовой-това. – Изд-во МГТУ им. Н.Э. Баумана, 1990. – 336 с.
- Чобиток, В.А. Теория движения танков и БМП: учебник / В.А. Чобиток. – М.: Военное издательство. – 1984. – 263 с.
- Сергеев, Л.В. Теория танка: учебник / Л.В. Сергеев. – М.: Издание Академии, 1973. – 493 с.
- Multi-Objective Genetic Algorithm for an automatic transmission gear shift map / A. Fofana, O. Haas, V. Ersanilli et al. // IFAC-PapersOnLine. – 2016. – T. 49, no. 3. – С. 123–128. https://www.doi.org/10.1016/j.ifacol.2016.07.021
- Development and Testing of an Automatic Transmission Shift Schedule Algorithm for Vehicle Simulation / K. Newman, J. Kargul, D. Barba // US Environmental Protection Agency. – 2015. – Т. 8(3). – С. 1417–1427. – https://doi:10.4271/2015-01-1142
- Филичкин, Н.В. Анализ планетарных коробок передач транспортных и тяговых машин: учебное пособие / Н.В. Филичкин. – Челябинск: Издательство ЮУрГУ, 2005. – 175 с.
- Беренгард, Ю.Г. Прикладная и инженерная математика / Ю.Г. Беренгард. – https://www.simumath.net/ (дата обращения 20.01.2020).
- Хомичев, А.С. Совершенствование методики проектного расчета фрикционных элемен-тов гидромеханических трансмиссий транспортных машин: автореферат дис. … канд. техн. наук / А.С. Хомичев. – Ижевск: Изд. ИжГТУ, 2010. – 16 с.
- Hashchuk, P. Optimal gear shift algorithm in the car transmission during its deceleration / P. Hashchuk, R. Pelio // UJMEMS. – 2018. – Т. 4 (1). – С. 131–143. https://doi.org/10.23939/ujmems2018.01.131
- Park, J. The Unified Relationship between Torque and Gear Ratio and Its Application in Multi-Step Automatic Transmissions. / J. Park // SAE Technical. – 2016. – P. 2016-01-1098. –https://doi.org/10.4271/2016-01-1098.
- Абдулов, C.B. Динамика переходных процессов и синтез оптимального управления пере-ключением передач гидромеханической трансмиссии транспортных машин: дис. … канд. техн. наук. / С.В. Абдулов. – Курган, 2005. – 143 с.
- Курочкин, Ф.Ф. Метод выбора рациональных характеристик процесса переключения передач в автоматической коробке передач автомобиля: автореферат дис. … канд. техн. наук / Ф.Ф Курочкин. – М: Изд-во МГТУ, 2008. – 16 с.
- Маханько, А.А. Моделирование и алгоритмы микропроцессорного управления трансмис-сией тяжелых транспортных машин: дис. … канд. техн. наук / А.А. Маханько. – Казань: КазГТУ им. А.Н. Туполева, 2007. – 138 с.
- Virtual Clutch Controller for Clutch-to-Clutch Shifts in Planetary-Type Automatic Transmis-sion / Y. Cheng, P. Dong, Sh. Yang, X. Xu // Dynamics and Control of Complex and Switched Systems. – 2015. – T. 2015. – Номер статьи 213162. – https://doi.org/10.1155/2015/213162.
- Протокол № 688.8323-04 по оценке режимов работы АПП модернизированного образца БМП-3 № 2Г09-1215. – Курган, 2004. – 24 с.
