Моделирование движения жидкости

Автор: Васильев К.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Физико-математические науки
Статья в выпуске: 5-5 (92), 2024 года.
Бесплатный доступ
В рамках данной работы реализовано программное обеспечение для моделирования трехмерного потока жидкости на основе уравнения Навье-Стокса и метода Smoothed Particle Hydrodynamics. В процессе разработкииспользовался программный интерфейс CUDA для высокопроизводительного моделирования на основе параллельных вычислений, а также языки программирования высокого уровня С и C++. Приведены результаты трехмерной гидростатической симуляции распределения частиц в резервуаре, частично заполненном водой.
Численное моделирование, движение жидкости, параллельные вычисления, метод sph, гидродинамика
Короткий адрес: https://sciup.org/170205287
IDR: 170205287 | DOI: 10.24412/2500-1000-2024-5-5-117-121
Fluid dynamics simulation
This work implements software for simulating three-dimensional fluid flow based on the Navier-Stokes equations and the Smoothed Particle Hydrodynamics (SPH) method. The development process utilized the CUDA programming interface for high-performance modeling based on parallel computing, as well as high-level programming languages C and C++. Results of a three-dimensional hydrostatic simulation of particle distribution in a partially water-filled reservoir are presented.
Текст научной статьи Моделирование движения жидкости
В наше время несомненным препятствием для физических опытов, особенно в области гидродинамики, является невозможность проведения реальных экспериментов с существующими объектами. Очевидным и неоспоримым преимуществом вычислительной гидродинамики является возможность прогнозирования катастрофических и разнообразных природных явлений (например, паводков). Благодаря существующим в этой сфере методам стало достижимым решение сложнейших задач при сохранении точности и скорости разнообразных вычислений.
Метод SPH фокусируется на дискретных сущностях, называемых частицами [1], и их взаимодействиях. Частицы представляют собой материальные точки с определенными свойствами (плотностью, давлением, скоростью и т. д.), которые перемещаются вместе с потоком жидкости. Гидродинамические свойства оцениваются в позициях частиц и рассчитываются из взвешенного среднего значений на других локальных частицах. Таким образом, каждая частица “сглаживается” по конечному объему постоянной массы [2], и таким образом метод SPH естественно адаптируется к плотности.
Для моделирования движения жидкости методом SPH используются следующие уравнения:
Уравнение импульса:
dVa V PPa Pb \
—— = - ) mb(-^ + ~+ nab I ^ a ^ ab^a ) + 9,
dt \pa Pb / где va — скорость, pa — давление, pa — плотность частицы a, nab — вязкий терм, Wab(ha) — сглаживающая функция, g — вектор авитации.
Формула для вязкости с учетом ga b = hvabrab/r2ab" + 9 2 , где rab = ra — rb и va b = va— V b , а rk и vk — положение и скорость частицы, ca b = (ca + C b )/2,92 = 0.01h2, может быть записана как:
( ^CabPab + Р Pab nab = { 70b
I 0
если V ab • r ab < 0, иначе.
( 2 )
Уравнение непрерывности:
“^ = ^ m b U ab ' ^ a ^ ab (h a ), (3)
b где vab = ua — Ub — относительная скорость частиц
P a
= ^m b W ab( ha), b
где pa — плотность частицы a, m b -масса частицы b, Wa b (ha) —сглаживающая функция.
Этот вариант уравнения непрерывности не содержит производной по и может быть использован для расчета плотности на каждом шаге по времени.
Уравнение состояния:
₽ a = SO-1)' (5)
где B — постоянный коэффициент, p0 — начальная плотность жидкости,
Y — адиабатический показатель.
Трехмерное моделирование распределение частиц проходит в рамках резервуара, частично заполненного водой. Как показано на рисунке 1, ширина, длина и высота резервуара составляет 2.0 м.
Рис. 1. Геометрия моделируемого пространства в виде куба
Плотность воды составляет р =
1000 ^г, численная скорость звука - с5 = 62.6 М, а коэффициенты искусственной вязкости - <т = 1.2, Р = 2.4. Расстояние между частицами устанавливается равным
А% = 0.023 м, а общее количество частиц жидкости - 262133 (см. рис. 2). Шаг по времени составляет 0.00005 с.
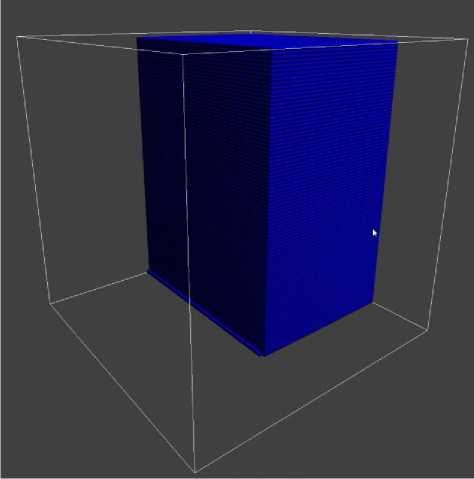
Рис. 2. Начальное расположение всех моделируемых частиц
В начальный момент времени все частицы находятся в состоянии покоя, все границы принято считать непроницаемы- ми. Рисунок 3 показывает распределение частиц в течение 1 с после начального положения.
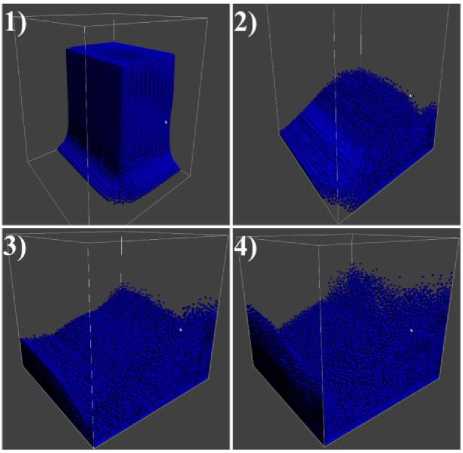
Рис. 3. Расположение моделируемых частиц в процессе вычислений: 1) 0.25 c, 2) 0.5 c, 3) 0.75 c, 4) 1 c.
Можно видеть на рисунке 4, что моделируемая жидкость постепенно угасает и поверхность начинает становится гладкой. В процессе вычислений не возникает каких-либо нереальных явлений, волнения в жидкости постепенно уменьшаются и граничные условия учитываются корректно, не позволяя частицам покидать область моделирования.
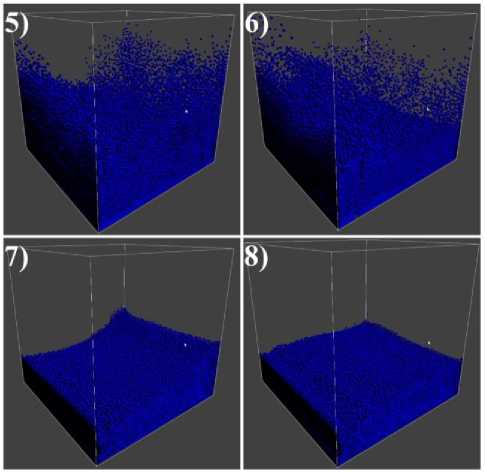
Рис. 4. Расположение моделируемых частиц в процессе вычислений: 5) 1.25 c, 6) 1.5 c, 7)
2.0 c, 8) 2.5 c
Рисунок 5 показывает стоячее положение всех частиц в жидком поле. Можно заметить, что частицы в большинстве своем располагаются на одинаковом расстоя- нии друг от друга. Возмущений не наблюдается, поверхность является ровной, а график распределения давления всех жидких частиц изображен на рисунке 6.
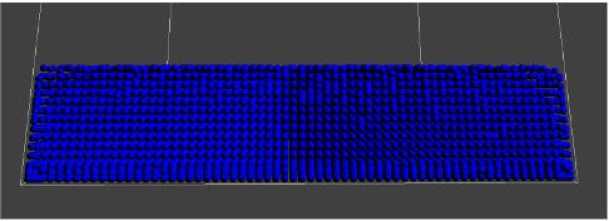
Рис. 5. Конечное состояние системы в процессе выполнения
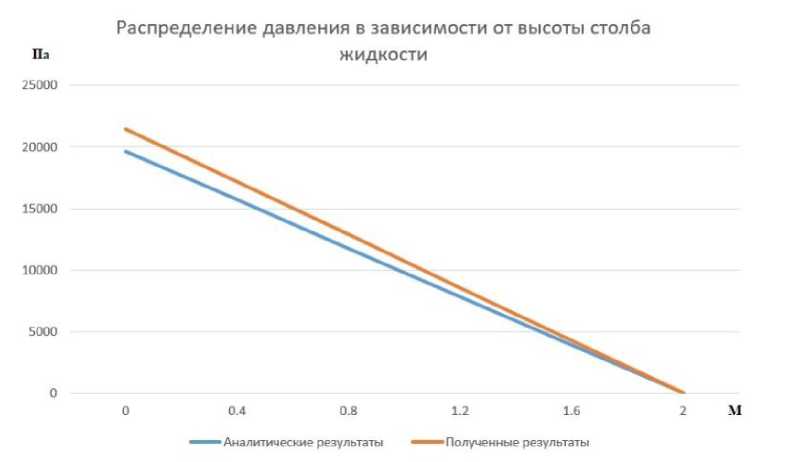
Рис 6. Распределение давления в зависимости от глубины
Анализ и тестирование разработанной программы позволили сделать вывод, что метод SPH является подходящим методом для реализации программного приложения на основе объектно-ориентированного подхода средствами языка С++ и про- граммного интерфейса CUDA, а также что выбор сглаживающего ядра, шага по времени и способа учета граничных условий является ключевым фактором для достижения эффективности и точности вычислений.
Список литературы Моделирование движения жидкости
- Monaghan J.J. Smoothed Particle Hydrodynamics // Annual review of astronomy and astrophysics. - 1992. - Vol. 30, № 1. - P. 543-574.
- Muller M., Charypar D., Gross M. Particle-based fluid simulation for interactive applications // Fluid dynamics. - 2003. - July. - P. 154-159.
