Моделирование и оценка параметров позиционирования совмещенной топологии навигации и связи подвижных объектов

Автор: Снежко В.К., Якушенко С.А., Бурлаков С.О., Веркин С.С., Чеканова Е.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 3-2 (90), 2024 года.
Бесплатный доступ
Рассматриваются вопросы моделирования наземной совмещенной топологии радионавигации и связи. Приведены результаты моделирования геометрического фактора на заданной площади в зависимости от местоположения опорных станций. Разработаны рекомендации по повышению точности определения местоположения абонентов систем мобильной связи с услугами позиционирования.
Радионавигационная система, система связи с подвижными объектами, топология, геометрический фактор, точность
Короткий адрес: https://sciup.org/170203475
IDR: 170203475 | DOI: 10.24412/2500-1000-2024-3-2-213-218
Modeling and evaluation of positioning parameters of the combined navigation topology and communication of mobile objects
The issues of modeling the ground-based combined topology of radio navigation and communications are considered. The results of modeling the geometric factor on a given area depending on the location of the reference stations are presented. Recommendations have been developed to improve the accuracy of determining the location of subscribers of mobile communication systems with positioning services.
Текст научной статьи Моделирование и оценка параметров позиционирования совмещенной топологии навигации и связи подвижных объектов
На точность определения местоположения подвижного объекта (навигационной аппаратуры потребителя) влияют как внешние деструктивны воздействия, так и внутренние, связанные, в частности, с топологий построения системы. Показателем топологии с точки зрения определения местоположения подвижного объекта является геометрический фактор (ГФ) или коэффициент геометрии. При реализации услуги позиционирования на основе топологии системы связи с подвижными объектами (ПО) возникает задача построения рациональной совмещенной топологии систем, обеспечивающей максимальное значение геометрического фактора при выполнении требований к связи. Вопросу оценки геометрического фактора различных топологий системы связи с подвижными объектами и посвящена данная статья.
Постановка задачи
Допустим, что местоположение подвижного объекта в радионавигационной системе (РНС) оценивается на основе измерения трех радионавигационных параметров (РНП): Р 1 , Р 2 , Р з - каждый из которых измеряется с ошибками. Пусть среднеквадратичное отклонение (СКО) ошибок измерения
РНП равны соответственно ст, , ст2 , Q3. Поскольку ошибка при измерении РНП вызывает смещение соответствующей плоскости положения , то она в оценивании местоположения определится смещением точки пересечения всех трех плоскостей положения . Причем степень смещения плоскостей зависит от количества опорных станций (ОС) РНС, топологии их размещения в рабочей зоне и методов измерения местоположения ПО. Обобщающим косвенным параметром оценки точности определения местоположения в РНС, учитывающим данные факторы является ГФ системы [1, 2, 3, 4]. Поэтому задачу оценки точности позиционирования ПО можно сформулировать следующим образом. Исследовать распределение геометрического фактора РНС в пространстве, состоящей из трех опорных станций, размещенных в заданной рабочей зоне со следующими методами измерения РНП: дальномерный; разностно-дальномерный; псевдодальномерный.
Для расчета предлагается структура модели оценки точности позиционирования ПО, представленная на рисунке 1. Модель реализует матричный способ оценки путем определения производных по направлениям и вычисления следа ковариационной матри- цы с учетом корреляционных взаимосвязей пространственных координат измеряемой точки и координат ОС.
В представленной модели блок «f» моделирует навигационные функции в точке fj, после чего, в блоке «G» от данной функции берутся частные производные и формируется матрица G, затем перемно- жаются матрица G на транспонированную в блоке «Gt» матрицу и в блоке «tr» вычисляется след полученной матрицы, характеризующую величину геометрического фактора в виде графика. Для получения численных значений используем блок «Display».

nj| | eif| ini in^ inl|| жй.
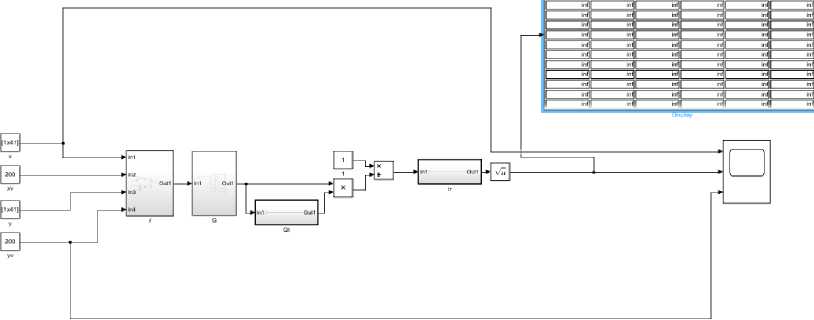
Рис. 1. Модель расчета геометрического фактора
Исходные данные для расчетов: координаты ведущей ОС – x в =20 км, y в =20 км; рабочая зона задана декартовой прямоугольной системой координат 40х40 км, шаг дискретизации – 0,1 км.
Дальномерный метод
В соответствии с моделью расчет геометрического фактора производится по выражению (1) [2]:
r= tr {(G G )-1}
dy df 2 dy df 3
dyA
G
транспонированная матрица G ; tr{ - }- след матрицы, f =
^(x t -x)2 + (y t -y)2 , i = 1, 2, 3.
Результаты расчета представлены в таблице 1.
Таблица 1. Результаты расчета ГФ с использованием дальномерного метода
|
№ п/п |
γ º |
Площадь зон равных ГФ, км2 |
Координаты ОС, км, ( x , y) |
||||
|
ГФ=1 |
ГФ=2 |
ГФ=3 |
ГФ=4 |
ОС 1 |
ОС 2 |
||
|
1 |
15 |
0 |
35,32 |
85,6 |
154,43 |
(19.608, 22.974) |
(20.392, 22.974) |
|
2 |
50 |
0 |
45,22 |
109,2 |
198,53 |
(18.372, 22.719) |
(21.268, 22.719) |
|
3 |
90 |
0 |
68,05 |
161,98 |
293,88 |
(17.879, 22.121) |
(22.121, 22.121) |
|
4 |
120 |
0 |
88,34 |
207,1 |
371,8 |
(17.402, 21.5) |
(22.598, 21.5) |
|
5 |
180 |
0 |
106,86 |
253,34 |
453,94 |
(17, 20) |
(23, 20) |
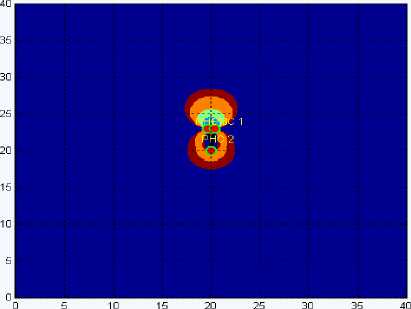
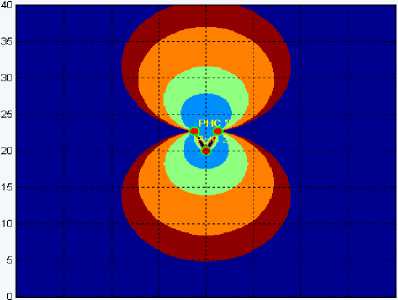
На рисунках 2-5 представлено графическое отображение геометрического фактора зависимости от топологии РНС.
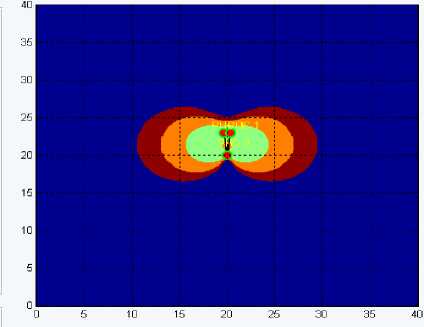
Рис. 2. Графическое отображение ГФ
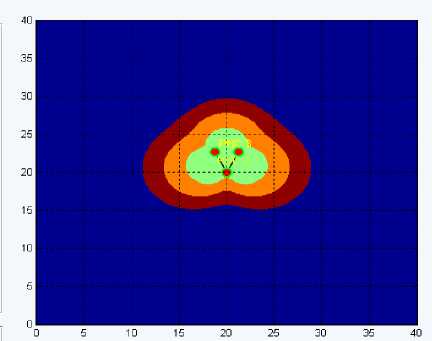
Рис. 3. Графическое отображение ГФ при
при у =15 °
Y =50 °
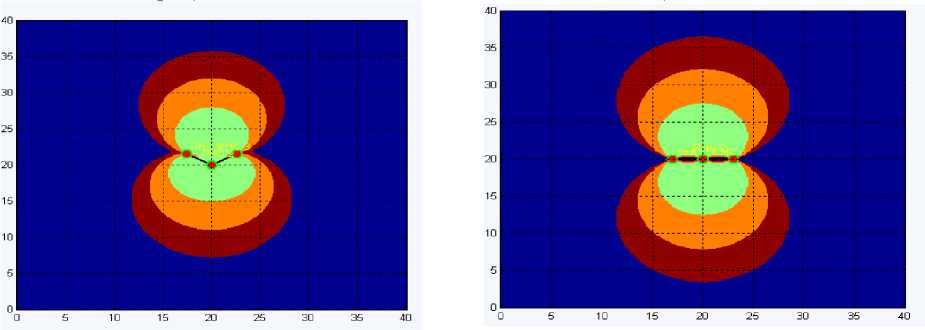
Рис. 5. Графическое отображение ГФ при при y=120°
Рис. 4. Графическое отображение ГФ
Y=180°
Предложения и рекомендации по использованию метода
Анализ результатов расчетов, выполненных для ранее приведенных данных, позволяет сделать следующие выводы:
-
1. С увеличением углов обзора ОС увеличивается зона обслуживания ПО. Максимальная площадь зоны образуется при угле между базами системы равными 180º и равна 453 км2, при ГФ меньше 3.
-
2. При углах баз более 70º зоны располагается в I и III секторах, при этом при γ=180º получаем максимальную площадь зоны равного ГФ.
-
3. Типовое значение ГФ составляет примерно 3, т.е. данный метод ухудшает инструментальную погрешность не более чем в 3 раза для выбранных размеров топологии.
Разностно-дальномерный метод при 6 =
[d/i d/il dxdy d/2 d/2
dxdy
Расч ет ГФ произв одит ся по выражен ию (1) [2]
f j = V(% i -x)2 + (У 1 -У)2 + V(% 2 - x)2 + (У 2 — У)2 при i= 1^3.
Результаты расчета представлены в таблице 2.
Таблица 2. Результаты расчета ГФ при разностно-дальномерном методе
|
№ п/п |
γ º |
Площадь зон равных ГФ, км2 |
Координаты ОС, км, ( x , y) |
||||
|
ГФ=5 |
ГФ=10 |
ГФ=15 |
ГФ=20 |
ОС 1 |
ОС 2 |
||
|
1 |
15 |
4,9 |
9,67 |
13,83 |
17,78 |
(19.608, 22.974) |
(20.392, 22.974) |
|
2 |
50 |
16,41 |
27,18 |
36,98 |
47,08 |
(18.372, 22.719) |
(21.268, 22.719) |
|
3 |
90 |
26,44 |
46,95 |
66,75 |
86,08 |
(17.879, 22.121) |
(22.121, 22.121) |
|
4 |
120 |
33,04 |
65,52 |
97,34 |
128,82 |
(17.402, 21.5) |
(22.598, 21.5) |
|
5 |
180 |
39,5 |
92,8 |
143,86 |
194,62 |
(17, 20) |
(23, 20) |
На рисунках 6-9 представлено графическое отображение геометрического фактора в зависимости от топологии РНС.
Предложения и рекомендации по использованию метода
Анализ результатов расчетов, позволяет сделать следующие выводы:
-
1. В случае равных длин баз РНС геометрия распределения геометрического фактора в плоскости симметрична относительно прямой, проведенной по биссектрисе угла, образованного базами.
-
2. В случае неравенства длин баз РНС при угле между базами 0º и 180º площади зон равных ГФ примерно равно, но ярко выражается неравномерность распределения изолиний ГФ. Данное обстоятельство позволяет путем выбора ведущей ОС оперативно изменять зону действия РНС.
-
3. Типовое значение ГФ составляет примерно 2, т.е. данный метод ухудшает инструментальную погрешность не более чем в 2 раза для выбранных размеров топологии.
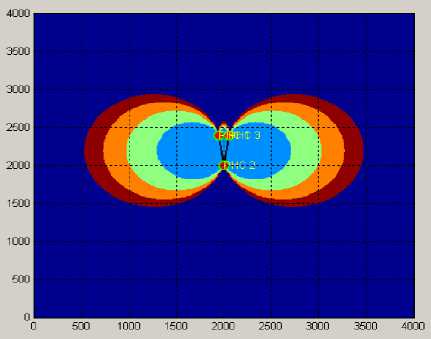
Рис. 6. Графическое отображение ГФ при у =15 °
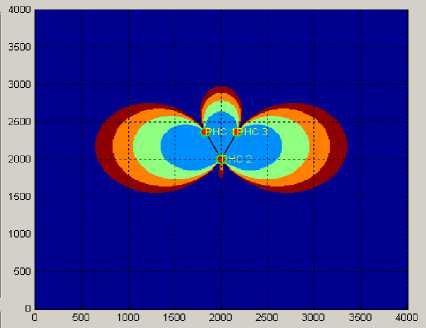
Рис. 7. Графическое отображение ГФ
=50°
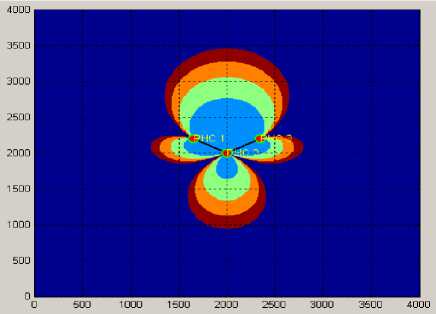
Рис. 8. Графическое отображение ГФ при
Y =120 °
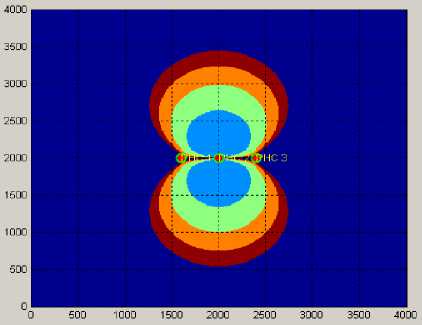
Рис. 9. Графическое отображение ГФ при
Y=180°
Псевдодальномерный метод
Расчет ГФ производится по выражению (1)
f j = 7(^-хУ + (y t —y)2 + 7(^ 2 -^)2 + (У 2 —У)2.
|
- df i |
dfi- |
|
|
dx |
dy |
|
|
df2 |
df 2 |
|
|
[2] при G = |
dx |
dy |
|
df 3 |
df 3 |
|
|
- dx |
dy - |
Результаты расчета представлены в таблице 3.
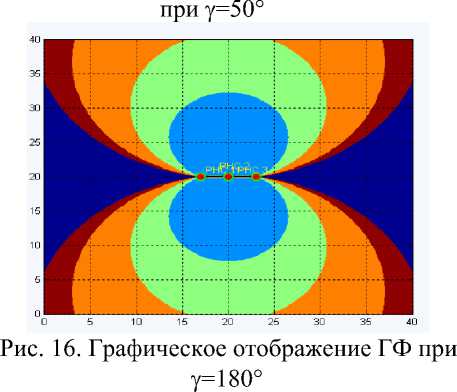
На рисунках 12-16 представлено графическое отображение геометрического фактора в зависимости от топологии РНС.
О 5 10 15 20 25 30 35 40
Рис. 12. Графическое отображение ГФ при
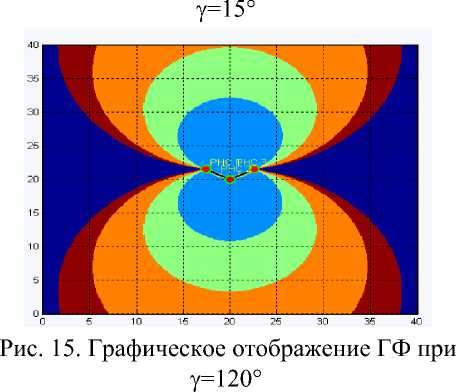
Рис. 13. Графическое отображение ГФ
Предложения и рекомендации по использованию метода
Анализ результатов расчетов, позволяет сделать следующие выводы:
-
1. Максимальная площадь зоны образуется при угле между базами равным 180º и равна 1314 км при ГФ менее 3.
-
2. При всех углах расположения баз относительно друг друга наблюдается то, что
- 3. Типовое значение ГФ составляет около
Таблица 3. Результаты расчета ГФ при псевдо дальномерном методе
Результаты исследований показывают, что наилучшим методом определения местоположения ПО по показателю ГФ явля-
5, т.е. метод ухудшает инструментальную погрешность не более чем в 5 раз для выбранных размеров топологии.
Заключение
В работе разработана модель оценки
ется разностно-дальномерный метод. При этом ГФ изменяется от 2 до 3 в зависимости от топологии размещения опорных станций в рабочей зоне. В связи с этим возникает следующая задача, заключаю-
точности позиционирования, которая является универсальным и объективным инструментом для проведения сравнительной оценки различных способов позицио-
щаяся в оптимизации топологии опорных станций РНС для получения наименьшего значения геометрического фактора системы [5].
нирования радионавигационных систем.
Список литературы Моделирование и оценка параметров позиционирования совмещенной топологии навигации и связи подвижных объектов
- Снежко В.К., Якушенко С.А., Матюшин А.Б., Ермоленко А.В., Моисеев А.А. Основы построения интегрированных систем навигации, связи и управления: Курс лекций. Учебное пособие для вузов связи. - ВАС. - Санкт-Петербург, 2010. - 300 с.
- Интегрированные системы навигации, связи и управления наземных подвижных объектов в задачах. Учебное пособие для вузов связи / В.К. Снежко, С.А. Якушенко - ВАС. - Санкт-Петербург, 2010. - 160 с.
- Монаков А. А. Теоретические основы радионавигации. Учебное пособие. - СПГУАП, 2002. - 386 с.
- Худяков Г.И. Транспортные информационно-управляющие радиоэлектронные системы: Учеб. пособие. - СПб.: СЗТУ, 2003. - 185 с.
- Якушенко С.А., Сальников Д.В., Мешков И.С. Прогнозирование доступности глобальных навигационных спутниковых систем при соблюдении заданной точности на основе имитационной модели. Успехи современной радилоэлектроники. 2019. - №12. - С. 20-33.
