Моделирование контактного взаимодействия захватывающего инструмента с биологической тканью

Автор: Яковенко А.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 4 (78) т.21, 2017 года.
Бесплатный доступ
Захватывающие инструменты используют для временного сдавливания биологических тканей. Чтобы оценить значения контактных напряжений, возникающих в биологической ткани, и оптимизировать прилагаемые нагрузки, в данной работе была решена контактная задача о взаимодействии зажимного устройства с биологической тканью. Рассмотрен дискретный контакт с биологической тканью. Изучено контактное взаимодействие зажимного инструмента, имеющего на контактирующей поверхности несколько выступов вытянутой формы, с биологической тканью, для описания механических свойств которой используется модель линейно упругого материала. Разработана модель для исследования распределения нагрузок между выступами медицинского инструмента, используемого для захвата мягких биологических тканей. Модель также позволяет произвести анализ зависимости силы, приложенной к зажиму, от его внедрения при разных расположениях выступов. На основании проведенного анализа установлено, что нагрузка на выступы распределена неравномерно, степень неравномерности зависит от расстояния между выступами. Рассмотрены случаи расположения выступов, при которых нагрузка на некоторые выступы стремится к нулевым значениям. Установлено, что разница между нагрузками на выступы возрастает с уменьшением отношения длины выступов к их ширине. Предложен алгоритм расчета высотного распределения выступов, которое обеспечивает их равномерную нагруженность. Используемая в работе форма выступа в виде узкого прямоугольного в плане штампа хоть и является упрощенной моделью, но позволяет на основании полученных аналитических зависимостей дать рекомендации относительно расположения выступов и их геометрических размеров с целью обеспечения их равной нагруженности, а также уменьшения общей прикладываемой силы для достижения нужной величины внедрения (захвата ткани).
Захватывающий инструмент, биологическая ткань, система выступов, упругий материал, распределение нагрузок, равнонагруженность, высотное распределение
Короткий адрес: https://sciup.org/146281836
IDR: 146281836 | УДК: 531/534:[57+61] | DOI: 10.15593/RZhBiomeh/2017.4.08
Simulation of contact interaction of a gripping tool with a biological tissue
Gripping tools used for the temporary compression of biological tissues. To estimate the values of the contact stresses in biological tissue, and to optimize the applied force, in this paper, we solved the contact problem of interaction of a gripping device with biological tissue. We considered a discrete contact with biological tissue. We studied the contact interaction of the gripping tool with the contact surfaces of several projections of elongated shape, with biological tissue, for describing the mechanical properties using a model of linearly elastic material. We developed a model for the study of the distribution of forces between the projections of the medical tool used to grip soft biological tissues. The model also allows analyzing the dependence of the force applied to the tool from its introduction at different locations of the projections. Based on the conducted analysis we found that the force on the projections is irregularly distributed, and the extent of the variation depends on the distance between the projections. In addition, there may be situations when the force on some of the projections will tend to zero values. We established that the difference between the forces on the projections increases with a decrease in the ratio of the length of the projections to their width. The proposed algorithm calculates the height distribution of the projections, which ensures uniform loading. The used form of a narrow rectangular stamp of a projection is a simplified model but it allows based on obtained analytical dependencies make recommendations relative to the location of the projections and their geometric dimensions to ensure equal loading and reduce the total applied force to provide the desired value of the introduction (capture the tissue).
Текст научной статьи Моделирование контактного взаимодействия захватывающего инструмента с биологической тканью
Захватывающие инструменты, или по-другому зажимы, – это медицинские инструменты, которые используют для временного сдавливания биологических тканей с целью остановки кровотечения, перекрытия просвета полых органов или для фиксации тканей и органов. Основное требование для этих инструментов – прочное удерживание тканей при лапароскопических операциях. Для этого они имеют рабочие кремальеру и губки, у которых, в зависимости от области применения, различаются
Яковенко Анастасия Александровна, инженер, Москва профили и размеры. По силе действия на ткани хирургические зажимы бывают эластичные, не вызывающие разрушения органов и тканей, жесткие, вызывающие обратимые или необратимые изменения ткани, и раздавливающие, вызывающие разрушение органов и тканей. Воздействие инструмента на биологическую ткань будет зависеть от свойств ткани, приложенных нагрузок, а также механических характеристик и формы рельефа поверхности инструмента. Для того чтобы оценить значения контактных напряжений, возникающих в биологической ткани, и оптимизировать прилагаемые нагрузки, необходимо решить контактную задачу о взаимодействии зажимного устройства с биологической тканью. Подробный класс задач контактного взаимодействия с биологической тканью рассмотрен в работе [7], где представлены методы решения задач Герца о сжатии упругих тел, внедрении штампа в многослойные основания, а также контактные задачи для тел с включениями. Также изложен подход, применяемый при решении контактных задач для линейных вязкоупругих тел. Данные методы позволяют изучать изменение напряженного состояния биологической ткани при взаимодействии с различными инструментами. Кроме того, в данной книге изложены подходы к решению динамических задач, например, задача о движении жесткого тела по границе упругого полупространства с включением. В работе [1] разработана математическая модель контактного взаимодействия головки сенсора с мягкой биологической тканью, которая позволяет исследовать напряженно-деформированное состояние, в том числе и контактные характеристики. В работе [10] решена задача о внедрении с постоянной скоростью индентора в двухслойное основание с учетом релаксационных характеристик слоев. Также в данной работе получены аналитические зависимости нагрузки и радиуса контакта от времени для различных значений скорости вдавливания индентора и выражение для распределения давлений под индентором в разные моменты времени. Дискретный характер взаимодействия тел рассматривается в работах [2, 4–6, 9]. В них изучается контактное взаимодействие системы N связанных между собой сферических штампов с упругим полупространством. На основании решения контактной задачи изучено распределение усилий между штампами при заданном внедрении системы штампов в упругое тело. В данной работе объединены две эти задачи и рассмотрен дискретный контакт с биологической тканью. Изучено контактное взаимодействие зажимного инструмента, имеющего на контактирующей поверхности несколько выступов вытянутой формы, с биологической тканью, для описания механических свойств которой используется модель линейно-упругого материала [8].
Постановка задачи
Рассмотрим контактную задачу о внедрении жесткого штампа, имеющего на поверхности систему N выступов, в упругое полупространство с заданными характеристиками ( E – модуль Юнга, ν – коэффициент Пуассона). Выступы моделируются вытянутыми вдоль оси Ox штампами, где 2 ai – длина i -го выступа, 2δ i – его ширина (рис. 1). Все выступы зажимного инструмента имеют одинаковую высоту, плоское основание и прямоугольную в плане форму. Расстояние между выступами и размеры площадок контакта будем считать заданными ( lij – расстояние между i -м и j -м выступами). Инструмент вдавливается без перекоса в упругое основание заданной силой P .
Введем систему координат Oxyz . Ось Oz совпадает с осью, направленной вертикально вниз через центр фиксированного i -го штампа, а плоскость Oxyz с недеформированной поверхностью полупространства. Оси Ox и Оу направлены вдоль длинной и короткой граней I -го штампа соответственно.
Запишем условие контакта для г -го выступа. На основании принципа суперпозиции смещение границы упругого полупространства под данным выступом можно представить как сумму вертикальных смещений м ' (1) ( x , у ) и u Z (2) ( x , у ) , где u Z (2) ( x , у ) - смещение, обусловленное распределенным по рассматриваемому пятну контакта давлением pi ( x , у ), а u Z (1) ( x , у ) - смещение, обусловленное влиянием остальных выступов. Таким образом, условие контакта для произвольного г -го выступа будет иметь вид
D = u Z (1)( x , у ) + u Z (2)( x , у X (1)
где D - внедрение инструмента в основание, которое не зависит от координат вследствие одинаковой высоты выступов. Смещение границы выступа, вызванное давлением pj(x,у), распределенным по другим выступам (j = 1,2,...,N, j * i), вычисляется по формуле uz(1)( x, у) =
1 -V 2 п E
£ 11
j = х j * i
P j ( x ', у ') dx ' dy '
Г/ V V л / (Xj + x *— x) + (Yj + у *— у)
где ( X j , Y j ) - координаты центральной точки области контакта j -го выступа, и интеграл берется по области контакта j -го выступа. В данном случае X j = 0, Y j = l tj .
Чтобы определить зависимость упругих смещений от приложенных давлений для единичного выступа, воспользуемся решением Галина [3] для узкого прямоугольного в плане штампа длиной а и шириной 5 , согласно которому выражение для контактных давлений можно представить в виде
P ( x , у ) =
где p ( x ) - распределение вдоль оси Ox силы, действующей по нормали к границе полупространства у = 0 .
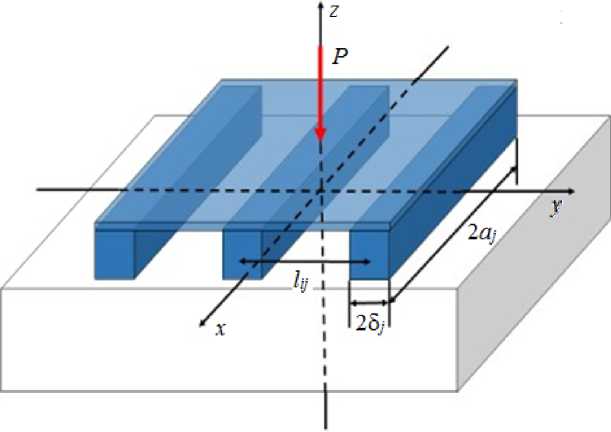
Рис. 1. Схема внедрения инструмента
При этом упругие смещения определяются соотношением u (x, 0) = px-, k где коэффициент постели вычисляется по формуле nE 1
2 ( 1 -v 2 ) lg ( a, 5 )
Отсюда смещение в среднем сечении i-го выступа, вызванное приложенным к нему давлением, вычисляется по формуле m 2(1 -v2)lg(a/5,) 5■ 2(1 -v2)lg(a/5,)
,, <=) ( x - = J------ -' j) j p ( x , y - dy = J------ )4 ./ j) p(x -,
n E \ n E
-5 ,
5 z . , p (x - r dy где J p(x- y- dy ~ J 77---2
"5, П -5^5i - y
p ( x )
■ 5, . -5
arcsin— - arcsin— -
5, 5,
= P , ( x - .
Условие равновесия в данном случае будет иметь вид
N p=I P -
i = 1
где p = JJ p ■ (x , y - dxdy
– нагрузка, действующая на -й выступ (интеграл берется по области контакта -го выступа).
Метод определения распределения нагрузок между выступами
Определим дополнительные смещения под произвольным -м выступом от действия давлений p j ( x , y -,( i * j - , приложенных к другим выступам. В силу предположения об узости выступа ( 5 j << a j - распределение давления p j ( x , y -, ( i * j - можно заменить распределением погонной силы p j ( x - на отрезке ( - a j , a j - .
Рассмотрим задачу, в которой действие соседних выступов заменяется силами, распределенными по линии, проходящей через центр выступа, т.е. погонными силами p(x). Тогда из соотношений (2) и (3) получаем т, 2 (1 -v2) lg (a,K) M u, = —------Z----------pi (x-- u, z z nE
1 -v 2 n E
Na
IJ j =1- j *■ - a,
p j ( x ') dx '
J ( x '- x ) + l y 2
Подставив (5) в условие контакта (1), будем иметь
2 ( 1 -v 2 ) lg ( a /5 , ) . . 1 -v 2 Л a p, ( x)dx'
—----—------p, ( x - + —— I J i 2 ■•
П E П E j = 1- j * ■ - a , ( x x '- x ) + l j
Отсюда получаем
2 ( 1 -V 2 ) lg ( a /5 ) 1 -v 2 ^ P j (x)dx'dx
—-----------P +---- I , ==.
a,nE a,nE J vV + i i J-1,. j * i - ai - a, U( X - X) + l .
Данная система вместе с условием равновесия (4) позволяет найти внедрение и распределение нагрузок, если известны взаимное расположение выступов, вид функции распределения давления под каждым штампом и величина силы, приложенной к инструменту.
Будем считать, что все выступы имеют одинаковую форму и длину (2 a ). Тогда формула (6) приобретает вид
2 ( 1 -v 2 ) lg ( a /5,) P a n E i
1 - v 2 a n E
N aa
I J J
. j - 1, j * i - a - a
pj ( x ') dx ' dx
Рассмотрим равномерное распределение давления, т.е. p i ( x ) - —L . Тогда 2 a
H a a Pj ( x ') dx ' dx
- a - a »/( x - x ) + l j
P jaa dx ' dx
2 a - a - a J ( x '- x ) 2 + l . 2
d l + 4 a + 2 a ln VV . , .
v V l . + 4 a - 2 a
- a (Vl»2+4 a 2
L ij
)
И окончательно формула (7) приобретает вид
D = 2 ( 1 -v 2 ) lg ( a, 5 , ) P a n E
1 -v 2 a n E
N
I
j - 1, j * i
x 1ц + 4 a + 2 a ln у J ---- v 42J 2 + 4 a 2 - 2 a
1 к / J + 4 a2 a
- lj)
Поскольку при выводе (8) использован ряд упрощающих предположений (в частности, предположение, что длина 2 a сохраняется для каждого выступа с учетом их взаимного влияния), то при исследовании системы уравнений (8) необходимо принимать во внимание ограничение на минимальное расстояние между выступами lij .
Для оценки минимального расстояния l min достаточно рассмотреть влияние ближайшего штампа к фиксированному и оценить, как погрешность замены зависит от расстояния между двумя рассматриваемыми штампами. Тогда запишем условия контакта в первом и во втором случаях:
D = 2 ( 1 -v 2 ) lg( a 5 , ) P + 1-V a a p , - , ( x ') dx'dx a n E ‘ a n E - a -L I ( x '- x ) 2 + 12 ’
D -
2 ( 1 -v 2 ) lg ( a / 5) P a nE i
1 - v 2 v1 / о л A 1 l 2 + 4 a 2 + 2 a
---7Г I ( P - 1 +A ) ln b 9 anE j - 1, j *, ^ A 2 + 4 a 2 - 2 a
У
Различаются только вторые слагаемые, поэтому погрешность запишется как
A-
, V l 2 + 4 a 2 + 2 a ln . -------
( V l 2 + 4 a2 - 2 a
1 (V l 2 + 4 a2 - 1
)
У
a
- J p , - 1 ( x ')ln
—a
( a - x ') 2 + 1 2 + a - x' ( a + x ') 2 + 1 2 - a - x'
^
dx '
У
P - 1
2lg ( a/ ^ -)
- V l + 4 a + 2 a ln----------------

Здесь для двойного интеграла использовалась теорема о среднем, а также то, что
A ( a — x ') + l + a — x1 минимальное значение функция ln достигает на границе области
A ( a + x ') + l — a — x1
интегрирования.
Перейдем к безразмерной длине l = 1/ 2 a . Тогда
^
— 2 (V l 2 + 1 — l )
)
A 1 f, V /2 + 1 + 1
< 1П
P — 1 21g ( a / 5 , ) ( l
Найдем l min , оценив отношение как
A
P V
< 0,1 . Например, для 1g ( a /5 , ) = 1 , l mm * 0,5.
Заметим, что минимальное расстояние зависит от количества выступов N . Погрешности в определении силы на произвольном фиксированном выступе от замены давлений на других выступах суммируются и убывают с увеличением расстояния.
P ( 1 —V 2 )
4 Ea 2
Введем для удобства безразмерные величины: Л = j, D = — , р = 2a 2a lj >5i +5j.
Р = — 4 e 2 . На расстояние между штампами накладывается условие
Тогда система уравнений (8) приобретает вид
-Л
— = - 1g ( a /5 , ) Р + - £ P j п ^ 2 j = 1, j * i
2 J l 2 + 1 + 1
I p+7i — 1
l 2 + 1 — l )
или в матричном виде элементы которой aj =
AP = D , где A - симметрическая матрица размера
4 lg ( al 5 , -)
2 f. V l 2 + 1 + 1
+ T 1n
n( V l 2 + 1 — 1
— 2 ( 7f71 — 1 )
(5y -
N x N , символ
—— —— ^1 ^w
Кронекера), а P, D – векторы размерности N . Данная система позволяет исследовать внедрение и распределение нагрузок при варьировании ширины выступов и их взаимного расположения.
Анализ распределения давления между выступами ПРИ ИХ РАВНОМЕРНОМ РАСПОЛОЖЕНИИ
Пусть все выступы располагаются на равном расстоянии l друг от друга ( l j = l| i — j ). Тогда условие контакта (9) примет вид

п
N
1g ( “1 5 , ) P l + 1 £ I 1 , 2 j = 1,j * i
f ln у 1 2 ( , — j ) 2 + 1 + 1
—
. (10)
Проанализируем зависимость нагрузки от расстояния при стремлении последнего к бесконечности l ^ да . Воспользуемся следующей оценкой, справедливой при больших l :
~ ln дl (i - j) +1+1 V ^2 (i - j )2+1 -1
- 2 (V ^ 2 ( i - j ) 2 + 1 - ^ ( i - j ) 2 )
Тогда из (10) следует, что величина внедрения стремится к некоторому 4lg ( a) 5 )
значению, не зависящему от расстояния, т.е. D ^---------р. Таким образом, при больших расстояниях между выступами распределение нагрузок становится равномерным.
Просуммировав формулу (9), получаем
NN
1 Z Z P j
2 i = 1 j = 1, j ^ i
(
In
k
которая отображает зависимость внедрения от прилагаемой к инструменту нагрузки.
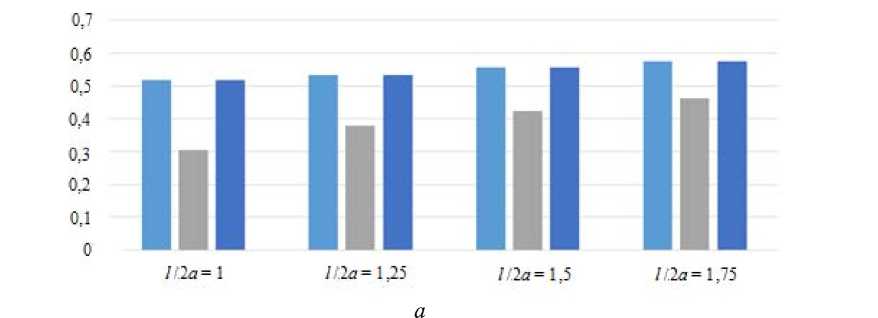
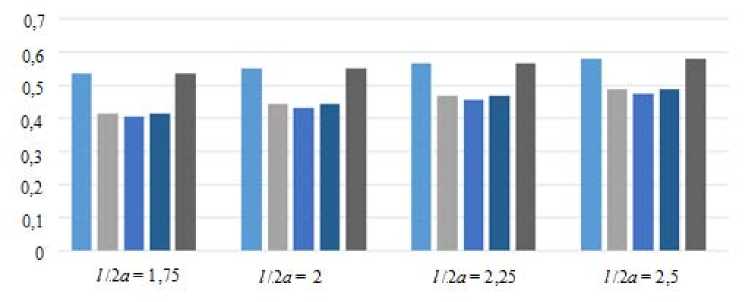
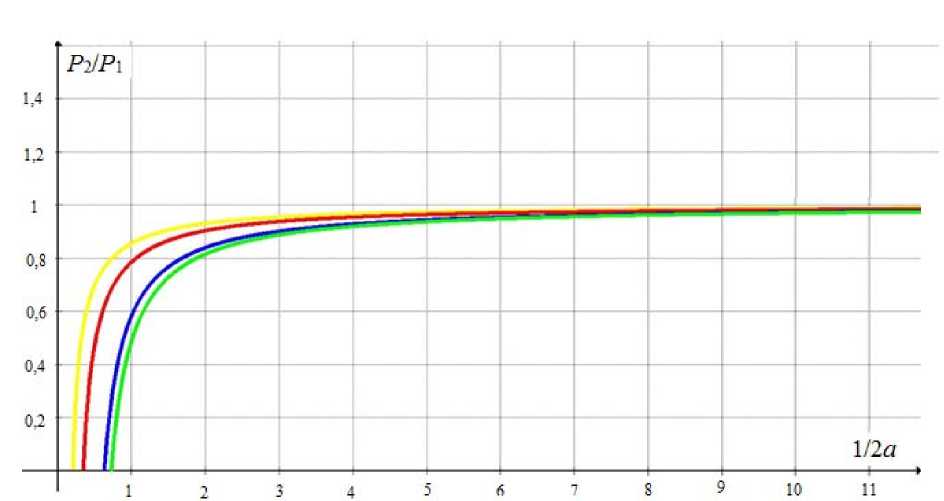
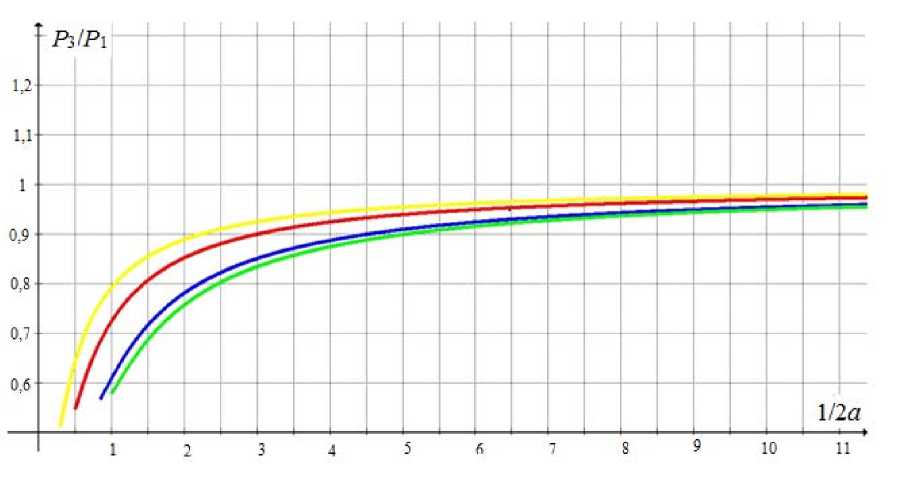
Для анализа распределения нагрузок на выступы возьмем определенное количество выступов, а также будем считать, что выступы имеют одинаковую ширину ( 2 5 ) . Ниже приведены графики распределения нагрузок между выступами (рис. 2, а , б ) и зависимости отношения нагрузок (рис. 3, а , б ), действующих на средний и крайний выступы от расстояния l между выступами для количества выступов, равного трем (рис. 2, а ) и пяти (рис. 2, б ).
б
Рис. 2. Диаграммы распределения нагрузок между выступами: а - N = 3 ;
б - N = 5 для разных расстояний между ними ( а /5 = 10 )
Результаты расчетов показывают, что при малых расстояниях между выступами нагрузки на крайние выступы больше, чем на средний, а при больших расстояниях, как и ожидалось, эти величины стремятся к одинаковому значению. Также из полученных зависимостей следует, что при уменьшении соотношения длины и ширины выступов увеличивается разница между нагрузками на средний и крайние выступы.
а
б
Рис. 3. График зависимости N = 3 отношения нагрузки на средний выступ к нагрузке на крайний ( P 2 P 1 ) ( а ), ( P 3 P 1 ) ( б ) и от расстояния между выступами ( l ) для четырех значений отношения длины выступа к его ширине ( а/ 5 ). Желтая линия - а /5 = 100 , красная линия - а /5 = 30 , синяя линия - а /5 = 10 , зеленая линия - а / 5 = 7
Определение высотного распределения равнонагруженной системы штампов
Рассмотрим теперь контактную задачу о внедрении жесткого штампа с системой N выступов на поверхности, имеющих разную высоту, но одинаковую форму. Тогда условие контакта (9) будет иметь вид

п
N
2 i = 1 i ± i
[. >71 - -

)
где D i = h i - D 0 , h i = h i /2 a - высотное распределение выступов, D 0 = D 0/ 2 a -сближение тел под действием нагрузки P .
Найдем такое высотное распределение, чтобы нагрузки на все выступы были одинаковы, т.е. Pi = P[N. Также пусть все выступы располагаются на равном расстоянии l друг от друга (ly = /|i - j). Из формулы (11) высота каждого выступа определяется как
^
h 4N lg ( a 8)
+ 1 S [ in 7 + 1 2>,Ц V l 2 ( i - j ) 2 + 1 - 1
-
Z4Z
+ D o . (12)
Из (12) следует, что высотное распределение равнонагруженных выступов существенно зависит от расстояния между ними; с увеличением расстояния второе слагаемое в скобках выражения (12) стремится к нулю, и высоты всех выступов выравниваются.
Из (12) также следует, что внедрение каждого выступа D i линейно зависит от нагрузки, прилагаемой к штампу. На рис. 4 представлен график зависимости соотношения высот от расстояния между штампами для случая пяти выступов.
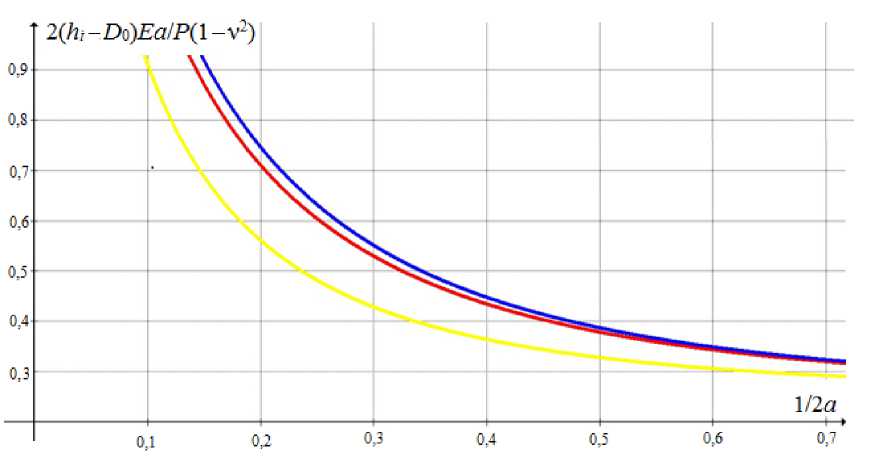
Рис. 4. Графики зависимости ( N = 5), высотного распределения
( ( h i - D 0 )/ P > )
от расстояния между выступами ( l ), a /8 = 10: желтая линия - первый и пятый, красная линия – второй и четвертый, синяя линия – третий)
На малых расстояниях при l ^ 0 логарифмические члены стремятся к члену
C ln , где C – некая константа. На больших же расстояниях подтверждается l2
~ 4 P lg ( а / 5 )
.
равномерное распределение штампов по высоте, D ^--------- i пN
Выводы
Разработана модель для исследования распределения усилий между выступами зажима, используемого для захвата мягких биологических тканей, а также для анализа зависимости приложенной к зажиму силы от его внедрения при разных расположениях выступов. На основании проведенного анализа установлено, что нагрузка на выступы распределена неравномерно, и степень неравномерности зависит от расстояния между выступами. Также могут возникать ситуации, когда нагрузка на некоторые выступы будет стремиться к нулевым значениям. Разница между нагрузками на выступы возрастает с уменьшением отношения длины выступа к ширине. Показано, что при выбранной форме прямоугольных в плане выступов внедрение возрастает при уменьшении расстояния между выступами. Предложен алгоритм расчета распределения выступов по высоте, обеспечивающего их равную нагруженность.
Используемая в работе форма выступа в виде узкого прямоугольного в плане штампа является упрощенной моделью выступов зажима. Однако она позволяет на основании полученных аналитических зависимостей дать рекомендации относительно расположения выступов и их геометрических размеров с целью обеспечения их равной нагруженности, а также уменьшения общей прикладываемой силы для создания нужной величины внедрения (захвата ткани).
Благодарности
Автор выражает благодарность своему научному руководителю, доктору физико-математических наук, профессору Московского государственного университета имени М.В. Ломоносова и Московского физико-технического института (государственного университета), академику Российской академии наук, Горячевой Ирине Георгиевне, за ценные советы и замечания при постановке и решении задачи, за необходимые исправления и внесенные правки, а также за рекомендации по оформлению статьи.
Работа выполнена при финансовой поддержке РФФИ (грант 16-58-52033).
Список литературы Моделирование контактного взаимодействия захватывающего инструмента с биологической тканью
- Антонов Ф.К., Горячева И.Г., Мартыненко Ю.Г., Рязанцева М.Ю., Су Фончин. Анализ контактного взаимодействия искусственного видеотактильного механорецептора с мягкими биологическими тканями // Российский журнал биомеханики. - 2013. - Т. 17, № 1. - С. 8-21.
- Аргатов И.И., Дмитриев Н.Н. Основы теории упругого дискретного контакта. - СПб.: Политехника, 2003. - 234 с.
- Галин Л.А. Контактные задачи теории упругости и вязкоупругости. - М.: Наука, 1980. - 304 с.
- Горячева И.Г. Механика фрикционного взаимодействия. - М.: Наука, 2001. - 478 с.
- Горячева И.Г. Периодическая контактная задача для упругого полупространства // Прикладная математика и механика. - 1998. - Т. 62, № 6. - С. 136-144.
- Горячева И.Г. Расчет контактных характеристик с учетом макро- и микрогеометрии взаимодействующих тел // Трение и износ. - 1999. - Т. 20, № 3. - С. 239-248.
- Горячева И.Г., Садовничий В.А. Применение методов механики контактных взаимодействий при диагностике патологических состояний мягких биологических тканей - М.: Изд-во Моск. ун-та, 2009. - 306 с.
- Джонсон К. Механика контактного взаимодействия - М.: Мир, 1989. - 510 с.
- Любичева А.Н. Контактное взаимодействие и изнашивание неоднородных тел: дис.. канд. физ.-мат. наук. - М., 2008. - 88 с.
- Yakovenko A., Goryacheva I., Dosaev M. Estimating characteristics of a contact between sensing element of medical robot and soft tissue. - Springer, 2017. - P. 561-569.
