Моделирование системы управления частотой вращения вала шнекового распределителя материала

Автор: Емельянов Р.Т., Серватинский В.В., Прокопьев А.П., Новрузов В.С.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки
Статья в выпуске: 5, 2016 года.
Бесплатный доступ
Для автоматического управления часто-той вращения вала дополнительного шнеко-вого устройства применяется система сер-воуправления частотой вращения вала рас-пределителя. Приводом вала шнекового рас-пределителя служит регулируемый гидромо-тор. Целью работы является разработка и исследование системы сервоуправления ча-стотой вращения вала шнекового распреде-лителея материалов. Для моделирования сервоуправления частотой вращения вала шнекового распределителя материалов ис-пользовалась программа «Matlab*Simulink». При исследованиях используется потенцио-метр, математическая модель которого за-писывается в виде апериодического звена пер-вого порядка с передаточной функцией. При моделировании системы сервоуправления ча-стотой вращения вала определялось влияние составляющих регулятора на динамику пере-ходных процессов системы с последователь-ным отключением составляющих: пропорцио-нальной Р, интегральной I и дифференциаль-ной D. Результаты исследований переходных процессов показали, что при применении ана-логового пропорционального регулятора пе-реходной процесс - колебательный, с ампли-тудой колебаний 2 мм. Пропорциональная со-ставляющая является основой регулирующе-го воздействия. Применение ПИ-регулятора позволило снизить амплитуду колебаний до 1,9 мм. Управление процессом с ПИД-регулятором обеспечивает амплитуду коле-баний 1,4 мм.
Шнековый распредели-тель, сервоуправление, гидромотор, модели-рование, передаточная функция, амплитуда колебаний
Короткий адрес: https://sciup.org/14084671
IDR: 14084671 | УДК: 625.852.74
Simulation of a control system of frequency of rotation of the auger dispenser of a material
For automatic speed control shaft of the screw device additional system is used to serving control the frequency of rotation of the shaft dispenser. The shaft drive auger dispenser motor is adjusta-ble. The purpose of the work is the development and research of system of the serving shaft speed screw facility materials. For modelling the serving control of the rotational speed of the shaft screw dispenser material was used the program ‘Matlab*Simulink’. In the study a potentiometer, a mathematical model which is written in the form of aperiodic link of the first order with a transfer func-tion were used. In the simulation system, the serv-ing, the shaft speed was determined by the effect of the controller on the dynamics of the transients of the system with sequential switching off compo-nents: proportional P, integral I, and a differential D. the results of the transient studies have shown that when using analog proportional controller transient oscillatory is with amplitude of 2 mm. The propor-tional component is the basis of the regulatory im-pact. The use of PI regulator has allowed reducing the amplitude of 1.9 mm. Control process with PID controller provides the amplitude of 1.4 mm.
Текст научной статьи Моделирование системы управления частотой вращения вала шнекового распределителя материала
Введение. При транспортировании асфальтобетонной смеси происходит температурная сегрегация. Для исключения температурной сегрегации асфальтобетонной смеси применяется технология с использованием перегружателя смеси из самосвала в асфальтоукладчик. Анти-сегрегационные шнеки перегружателя перемешивают материал непосредственно перед его загрузкой в асфальтоукладчик. Применение существующей технологии ведет к удорожанию строительства асфальтобетонного покрытия [1]. С целью упрощения технологии предлагается управление частотой вращения вала дополнительного шнекового устройства. Для автоматического управления частотой вращения вала применяется система сервоуправления частотой вращения вала шнекового распределителя.
Цель исследования: разработка и изучение системы сервоуправления частотой вращения вала шнекового распределителя материалов.
Условия и методы исследования . Объектом исследования является шнековый распределитель материала (рис. 1).
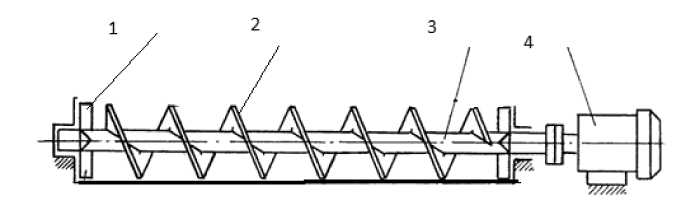
Рис. 1. Шнековый распределитель материала: 1 – опора вала; 2 – лопасти вала; 3 – вал распределителя; 4 – гидромотор
Приводом вала шнекового распределителя служит регулируемый гидромотор, содержащий корпус и крышку, соединенные с образованием полости для размещения блока цилиндров, установленного с возможностью качания для регулирования рабочего объема гидромотора.
В системах управления техническими объектами наибольшее распространение получили пропорционально-интегрально-дифференциальные (ПИД) регуляторы. Структурная схема системы сервоуправления частотой вращения вала шнекового распределителя с ПИД-регулятором приведена на рисунке 2.
Математическое описание элементов системы управления выполнено на основе передаточных функций.
Передаточная функция гидромотора определяется из условия [2]:
ф = w;
1K w = -—W y +—5
TsTs где ф - угол поворота винтового шнека; ш - уг- ловая скорость вращения винтового шнека; δ – угол поворота качающего блока гидромотора; Ts – постоянная времени; K – постоянный коэффициент, имеющий размерность рад/с.
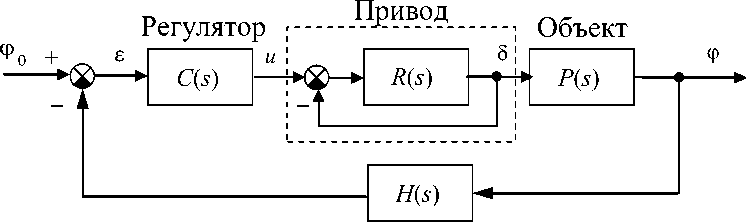
Измерительная система
Рис. 2. Структурная схема системы с сервоуправлением частотой вращения вала
Передаточная функция гидромотора [3] опи- сывается апериодическим звеном первого по- рядка:
R ( s ) =
.
T r S + 1
Передаточная функция объекта управления описывается звеном второго порядка:
P ( s) =
K
.
s (T s s + 1)
Для измерения угла поворота качающего блока гидромотора используется потенциометр, математическая модель которого записывается в виде апериодического звена первого порядка с передаточной функцией:
H ( s ) =
.
T oc s + 1
Передаточная функция идеального ПИД- регулятора
К Ks 2 + K„s + K
C (s)=K + Ki + Ks=----p---, psd s где s – преобразователь Лапласа; Kp, K иKd - коэффициенты пропорциональности, интегрирования и дифференцирования, соответственно.
При моделировании системы сервоуправления частотой вращения вала определялось влияние составляющих регулятора на динамику переходных процессов системы последовательным подключением составляющих: пропорциональной (П), интегральной (И) и дифференциальной (Д).
Результаты моделирования шнекового распределителя с пропорциональным (П) регулятором приведены на рисунке 3.
Результаты исследований переходного процесса показали, что при применении непрерывного пропорционального регулятора переходный процесс колебательный с перерегулированием, время регулирования с учетом 5 %-й зоны составляет 20 с.
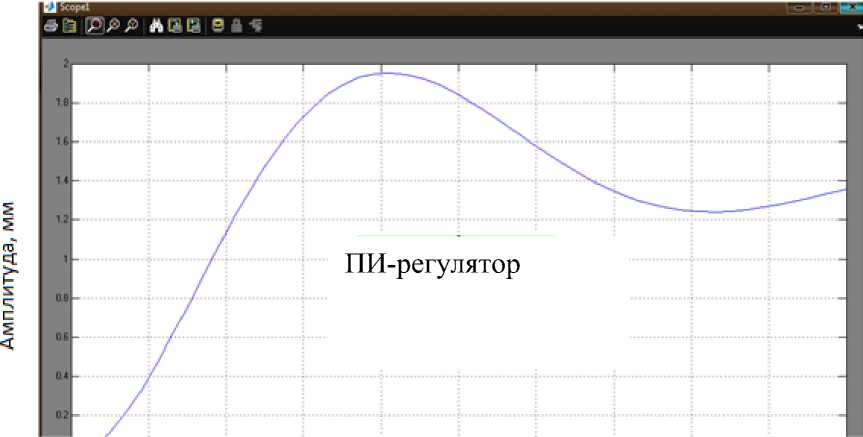
График переходного процесса, полученный имитационным моделированием системы с ПИ-регулятором, приведен на рисунке 4.
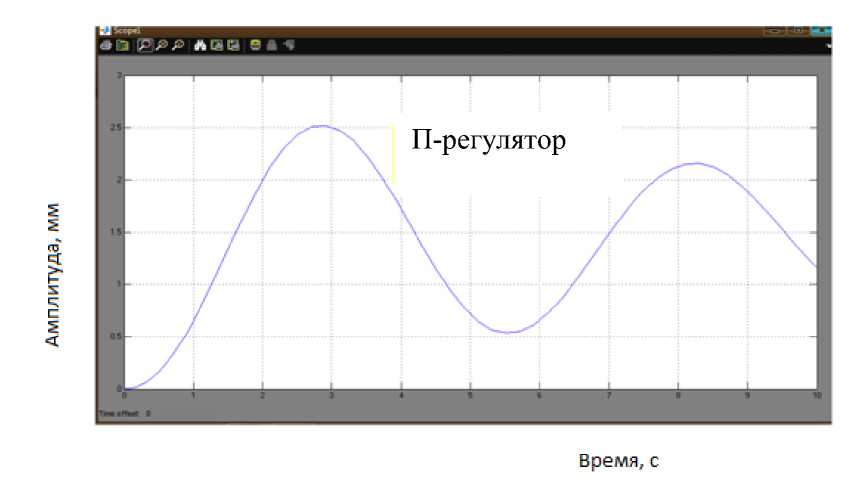
Рис. 3. График переходных процессов для модели с пропорциональным регулятором
Время, с
Рис. 4. График переходного процесса для модели с пропорционально-интегральным регулятором
Переходный процесс системы управления с ПИ-регулятором колебательный, с перерегулированием, время регулирования с учетом 5 %-й зоны составляет 15 с.
График переходного процесса для имитационной модели с ПИД-регулятором приведен на рисунке 5.
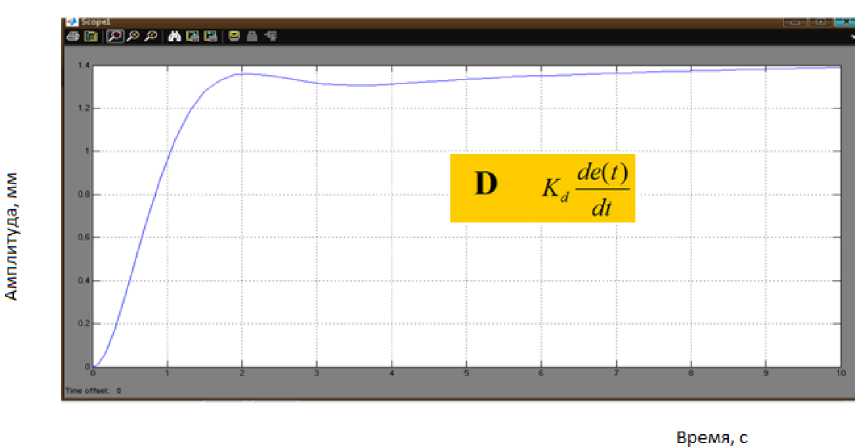
Рис. 5. График переходных процессов для модели с ПИД-регулятором
Переходный процесс системы с ПИД-регулятором апериодический без перерегулирования, время регулирования с учетом 5 %-й зоны составляет 4,5 с.
Заключение. Имитационное моделирование в среде MATLAB&Simulink системы управления шнековым распределителем с сервоприводом показало, что при использовании ПИД-регулятора по сравнению с П-, ПИ-регуляторами можно получить переходный процесс без перерегулирования, что особенно важно для оборудования с гидроприводом. Переходный процесс системы с П-, ПИ-регуляторами характеризуется колебательным процессом с значительным перерегулированием. Полученные результаты свидетельствуют о возможности значительного уменьшения времени переходного процесса, что особенно важно для систем с гидравлическим приводом.
Список литературы Моделирование системы управления частотой вращения вала шнекового распределителя материала
- Емельянов Р.Т., Скурихин Л.В., Закурдаев А.В. Моделирование динамики регулируемого гидромотора//Вестн. КрасГАУ. -2014. -№ 8. -С. 181-185.
- Prokopiev A.P., Ivanchura V.I., Emelianov R.Т. The analytical solution and the dynamic charac-terristics of the system model velocity control vi-brating roller//Journal of Siberian Federal University. Engineering & Technologies 4 (2014 7) 482-490.
- Емельянов Р.Т., Турышева Е.С., Шилкин С.В. и др. Моделирование процесса управления распределением асфальтобетонной смеси по ширине дороги//Современные проблемы и пути их решения в науке, транспорте, про-изводстве и образовании: сб. науч. тр. SWorld. Т. 5. -2013. -С. 29-34.
