Моделирование столкновения транспортного средства с велосипедом

Автор: Тарасов Е.А.
Журнал: Вестник Академии права и управления @vestnik-apu
Рубрика: Теория и практика юридической науки
Статья в выпуске: 4 (74), 2023 года.
Бесплатный доступ
Постоянно растущий спрос на транспорт и необходимость перевозить как людей, так и товары привели к увеличению загруженности дорожно-транспортных сетей. В результате чего увеличивается и количество серьезных дорожно-транспортных происшествий. Из общего числа дорожно-транспортных происшествий значительный рост был зарегистрирован среди велосипедистов: в 2022 году - 13,9 % от общего числа транспортных средств, попавших в дорожно-транспортные происшествия, по сравнению с 6,6 % в 2010 году. Настоящая статья основана на тщательном анализе кинематических и динамических параметров в случае столкновения транспортного средства с велосипедом. Чтобы изучить тип столкновения транспортного средства с велосипедом, мы провели сравнительный анализ в отношении расстояния, на которое отбрасывается велосипедист после столкновения, изменения скорости транспортного средства и велосипеда, изменения скорости в области головы велосипедиста, а также изменения ускорения на транспортном средстве, велосипеде и в области головы велосипедиста. Следовательно, мы смоделировали столкновение транспортного средства с велосипедом для двух различных случаев: лобовое столкновение транспортного средства с велосипедом сзади и лобовое столкновение транспортного средства с велосипедом спереди. Основываясь на результатах, полученных после моделирования столкновения транспортного средства с велосипедом, для двух различных случаев, а именно лобового столкновения транспортного средства с велосипедом сзади и лобового столкновения транспортного средства с велосипедом спереди, мы установили, что, хотя общее проекционное расстояние велосипедиста больше в первом случае (лобовое столкновение транспортного средства с велосипедом сзади), максимальная скорость и ускорение больше во втором (лобовое столкновение транспортного средства с велосипедом спереди).
Дорожно-транспортные происшествия, столкновение транспортного средства с велосипедом, моделирование, общее проекционное расстояние, ускорение головы
Короткий адрес: https://sciup.org/14129160
IDR: 14129160 | УДК: 343.148.63 | DOI: 10.47629/2074-9201_2023_4_38_44
Simulation of a collision between a vehicle and a bicycle
The ever-growing demand for transport and the need to transport both people and goods have led to an increase in the congestion of road transport networks. Subsequently, the main negative effect is an increase in the number of serious road accidents. Of the total number of serious road accidents, a significant increase was registered among cyclists: in 2022, 13.9 % of the total number of vehicles involved in road accidents, compared with 6.6 % in 2010. This article is based on a thorough analysis of kinematic and dynamic parameters in the event of a collision of a vehicle, a bicycle and a cyclist assembled. To study the type of collision between a vehicle and a bicycle, we conducted a comparative analysis with respect to the distance by which the cyclist is thrown after the collision, changes in the speed of the vehicle and bicycle, changes in speed in the area of the cyclist’s head, as well as changes in acceleration recorded on the vehicle, bicycle and in the area of the cyclist’s head. Therefore, we have modeled a collision of a vehicle with a bicycle for two different cases, i.e. a head-on collision of a vehicle with a bicycle from behind and a head-on collision of a vehicle with a bicycle from the front.
Текст научной статьи Моделирование столкновения транспортного средства с велосипедом
В елосипед, несомненно, становится все более эффективным средством передвижения, оказывающим положительное влияние на окружающую среду, а также на загруженность уличной сети.
Однако из-за отсутствия надлежащей инфраструктуры, то есть соответствующих велосипедных дорожек, а также из-за пробок на дорогах в последние десятилетия регистрируется все большее число дорожно-транспортных происшествий с серьезными травмами (см. Рисунок 1). На долю велосипедистов приходится 9 % смертей в Российской Федерации. Число смертельных исходов среди велосипедистов сократилось всего на 3 % с 2010 по 2022 год, что значительно меньше, чем снижение общего числа смертельных исходов (на 18 %) за тот же период. Наибольшее число смертей зафиксировано в ориентированных на велосипед городах с хорошо развитой велосипедной инфраструктурой.
Дорожно-транспортные происшествия с уязвимыми участниками дорожного движения, а именно пешеходами или велосипедистами, были проанализированы нами в соответствии с использованием трех различных подходов: углубленного расследования дорожно-транспортных происшествий, численного моделирования с использованием модели с несколькими телами и экспериментального восстановления с объектом исследования, чтобы определить корреляцию между скоростью автомобиля и положением жертвы при столкновении.
Столкновения типа “транспортное средство-велосипед” имеют ряд особенностей, обусловленных следующими аспектами:
-
• в начальный момент столкновения велосипе дист является частью велосипеда, но во время столкновения (столкновений) он отделится от него;
-
• вес велосипеда и велосипедиста близок по
величине, что оказывает влияние на столкновение:
первоначально при столкновении участвует сумма масс, а затем, из-за отстраненности велосипедиста, удар выдерживается только массой велосипеда; следовательно, мы можем говорить о столкновении с телом, масса которого изменяется с течением времени;
-
• столкновение велосипеда с транспортным средством происходит на более высокой скорости транспортного средства в сравнение со скоростью велосипеда, следовательно, приводит к различным смещениям велосипеда по траектории, которая может сильно повлиять на тяжесть аварии.
Типы столкновений транспортного средства и велосипеда
Чтобы проанализировать кинематику столкновения транспортного средства с велосипедом, нам необходимоопределить несколько параметров, которые влияют как на траектории движения участников дорожного движения, так и на травмы, полученные в результате столкновения. Наиболее важными факторами являются: тип и масса транспортного средства, направление движения, характеристики дороги, на которой произошло столкновение и окружающая среда. На Рисунке 2 показаны различные типы столкновений транспортного средства с велосипедом:
-
1) фронтальное транспортное средство – боковой велосипед;
-
2) фронтальный велосипед – переднее транспортное средство;
-
3) фронтальный велосипед – боковое транспортное средство;
-
4) фронтальный велосипед – угол транспортного средства;
-
5) фронтальный велосипед – заднее транспортное средство;
-
6) фронтальное транспортное средство – задний велосипед;
-
7) другие типы столкновений.
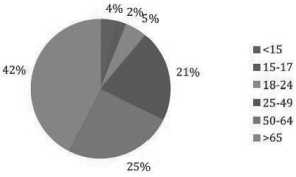
Рисунок 1. Процентное распределение жертв велосипедных аварий по возрастным группам
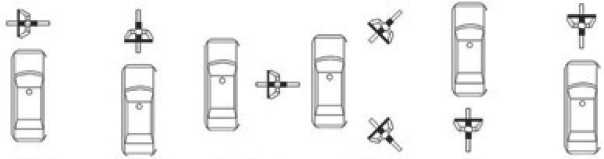
Рисунок 2. Классификация столкновений транспортного средства с велосипедом
Кинематические параметры столкновения велосипеда с транспортным средством
При лобовом столкновении велосипеда с транспортным средством (см. Рисунок 3) скорости должны определяться, исходя из расстояния, на которое велосипед или велосипедисты были отброшены после столкновения.
Считается, что узел велосипед-велосипедист имеет центр тяжести над точкой удара на высоте h (см. Рисунок 3) оси x ортогональной системы координат, при этом ось x расположена в плоскости дороги в направлении движения велосипеда; и поскольку ось y проходит через этот центр в положении, соответствующем моменту столкновения велосипеда с транспортным средством, то ее положение считается ориентиром временнóй шкалы для математической интерпретации соответствующего физического явления.
Значимость кинематических параметров, характеризующих столкновение велосипеда с транспортным средством, указана в Таблице.
После падения с велосипеда велосипедист перемещается по воздуху на определенное расстояние (проекционное расстояние), а затем падает на землю, одновременно скользя, чтобы остановиться. Энергия тела расходуется на преодоление трения, повреждение внутренних органов, переломы костей и разрывы одежды. Между Spc, проекционным расстоянием велосипедиста, и vbc, скоростью велосипедиста, со- ответственно между Spb – проекционным расстоянием велосипеда и vbb – скоростью велосипеда, после удара были установлены следующие эмпирические зависимости:
. km для велосипедиста: Vec = 8.5458 - SyJ—] (1) для велосипеда: vbb = 7,31211-S^^ (2)
В случае велосипедистов среднее замедление dc движения после удара увеличивается с увеличением расстояния проекции, в то время как для велосипедов замедление db демонстрирует обратное изменение. Скорость велосипедиста, vbc, и скорость велосипеда, vbb, могут быть определены на основе средних замедлений (dc, db) их движения во время их проекции на Spc и, в частности, расстояния Spb. Соответственно, мы рассматриваем следующие соотношения:
для велосипедиста: ^ = ^26'4-S^^] (3) для велосипеда: №= 7,31211 -S^^ (4)
Скорость велосипедиста с момента столкновения зависит как от его начальной скорости, так и от скорости транспортного средства.Приме-няя принцип сохранения импульса, можно установить скорость удара, принимая во внимание массы транспортного средства, велосипедиста и велосипеда наездника.
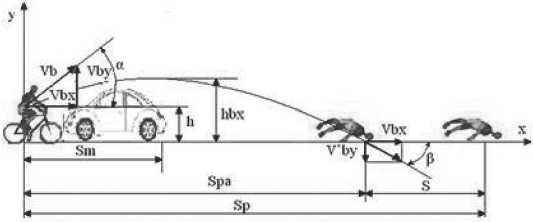
Рисунок 3. Схема лобового столкновения транспортного средства с велосипедом
Таблица
Кинематические параметры столкновения транспортного средства с велосипедом
|
Параметры |
Обозначение |
|
расстояние, пройденное телом велосипедиста при скольжении по земле |
S |
|
расстояние, пройденное велосипедистом до максимальной высоты |
Sm |
|
расстояние, пройденное велосипедистом с момента броска до приземления |
Spa |
|
расстояние, пройденное велосипедистом от начала его броска до остановки на земле |
Sp |
|
высота центра тяжести велосипедиста в начале броска |
h |
|
максимальная высота траектории движения велосипедиста |
hbx |
|
начальная скорость велосипедиста (скорость велосипеда в момент удара) |
vb |
|
угол между первоначальной траекторией движения велосипедиста и дорогой |
α |
|
угол между конечной траекторией движения велосипедиста и дорогой |
β |
Моделирование столкновения транспортного средства – велосипеда «в сборе» – велосипедиста
Для более точного анализа, а также при меньших затратах по сравнению с экспериментальным тестированием, было разработано несколько программных платформ. Такие платформы позволяют нам моделировать ряд сценариев дорожно-транспортных происшествий с учетом кинематики транспортного средства до и после столкновения, а также определять динамические параметры столкновения. Программное обеспечение VirtualCrash использует модель столкновения Кудлича-Слибара, предоставляя возможность вычислять параметры после столкновения с данными до столкновения на основе определенных входных данных (масса, положение и т. д.).
Эта модель основана, с одной стороны, на том факте, что столкновение происходит за очень короткий промежуток времени, следовательно, учитывается движение транспортных средств во время столкновения. С другой стороны, передача силы происходит в одной точке. Расчет столкновения основан на том факте, что силы, воздействующие на транспортное средство, пренебрежимо малы помимо реальной силы столкновения. Метод использует скорости до столкновения в качестве входного параметра и учитывает совместное движение точек столкновения, таким образом вычисляя их скорости.
В нашем исследовании мы провели сравнительный анализ столкновения транспортного средства с велосипедом с учетом проекционного расстояния велосипедиста после столкновения, изменения скорости транспортного средства, велосипеда и велосипедиста, а также изменения ускорения, зарегистрированного на транспортном средстве, велосипеде и голове велосипедиста.
Мы смоделировали столкновение транспортного средства с велосипедом для двух различных случаев: случай 1 – лобовое столкновение транспортного средства с велосипедом сзади (см. Рисунок 4) и случай 2 – лобовое столкновение транспортного средства с велосипедом спереди (см. Рисунок 5). В двух проанализированных случаях данные о транспортном средстве, велосипеде и велосипедисте до столкновения были идентичными. Единственное изменение связано с направлением движения велосипеда относительно положения транспортного средства. Значение скорости велосипеда было установлено для велосипедиста мужского пола в возрасте 3150 лет со средней скоростью 18 км/ч.
Велосипедные травмы в результате столкновения с транспортным средством наиболее часто встречаются среди мужчин среднего возраста, произошедшие в населенном пункте. Основываясь на данной статистике, мы посчитали, что дорожно-транспортное происшествие произошло в пределах населенного пункта, поэтому скорость транспортного средства составляла 50 км/ч. Кроме этого, мы рассмотрели динамическое состояние транспортного средства при торможении с ускорением 4 м/с2 (см. Рисунок 5).
Основной удар в случае 1 приходится на заднее колесо велосипеда, то есть на переднюю часть транспортного средства. А в случае 2 основной удар приходится на переднее колесо велосипеда и переднюю часть транспортного средства. В результате первичного столкновения транспортного средства с велосипедом велосипедист оказывается переброшенным через переднюю часть (капот) транспортного средства(см. Рисунок 6).
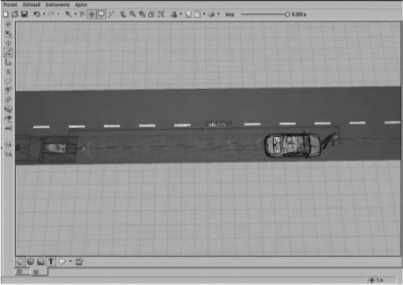
Велосипедист приподнимается на передней части транспортного средства (далее – ТС) к ветровому стеклу и переносится транспортным средством по направлению движения велосипеда. Как только включается тормозная система автомобиля, его скорость снижается, и велосипедист начинает скользить по передней части ТС. Велосипедист выбрасывается на проезжую часть перед транспортным средством в направлении его движения. После того, как велосипедиста выбрасывает на проезжую часть, он начинает катиться по дороге. Конечное положение транспортного средства и велосипедиста показано на Рисунке 7 для двух проанализированных ситуаций. Мы опреде-
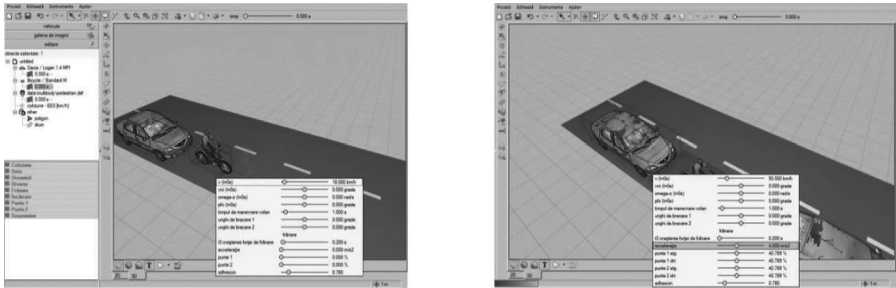
Рисунок 4. Начальная скорость велосипеда
Рисунок 5. Динамическое состояние транспортного средства – торможение
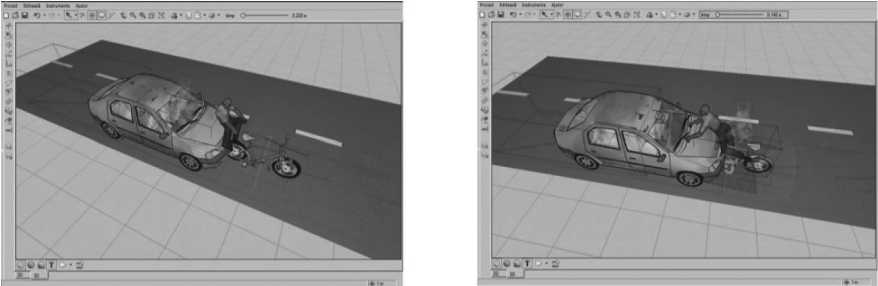
Рисунок 6. Велосипедист переброшен через переднюю часть (капот) транспортного средства
лили общее проекционное расстояние велосипедиста, включая расстояние, когда велосипедиста перевозят на капоте транспортного средства, и расстояние, на которое велосипедист катится по проезжей части. Общее проекционное расстояние велосипедиста относительно места первичного столкновения в случае 1 составляет 21,4 м, а в случае 2 – 19 м.
Чтобы определить изменение скорости участников, намибылисгенерированыдиаграммызависимости времени от скорости. По данным на рисунках 8 и 9 мы можем заметить, что скорость транспортного средства в момент столкновения составляет 50 км/ч, а велосипеда – 18 км/ч в обоих проанализированных случаях. После удара скорость транспортного средства составляет 45 км/ч (в случае 1) и 42 км/ч (в случае 2).Для велосипеда мы зафиксировали скорость 50 км/ч (в случае 1) и 52 км/ч (в случае 2). Максимальная скорость, зарегистрированная в области головы велосипедиста, достигла 45 км/ч в первой ситуации и 53 км/ч в случае лобового столкновения транспортного средства с велосипедом.
В случае лобового столкновения транспортного средства с велосипедом сзади максимальное значение ускорения в области головы велосипедиста регистрируется на этапе захвата велосипедистом передней части транспортного средства – до уровня ветрового стекла и достигает 100 м/с2. В случае лобового столкновения транспортного средства с велосипедом максимальный уровень ускорения в области головы
велосипедиста регистрируется на этапе захвата велосипедистом передней части транспортного средства – до уровня ветрового стекла и достигает 250 м/с2.
Вывод
Чтобы изучить столкновение транспортного средства с велосипедом, мы провели сравнительный анализ проекционного расстояния велосипедиста после столкновения, изменения скорости транспортного средства, велосипеда и в области головы велосипедиста, а также изменения ускорения, зарегистрированного на транспортном средстве, велосипеде и в области головы велосипедиста.
Мы разработали моделирование столкновения типа транспортное средство – велосипед для двух различных случаев, а именно: лобовое столкновение транспортного средства с задним велосипедом и лобовое столкновение транспортного средства с передним велосипедом. В двух проанализированных случаях данные о транспортном средстве, велосипеде и велосипедисте до столкновения были идентич-ными.Единственное изменение связано с направлением движения велосипеда относительно положения транспортного средства.
Проведя сравнительный анализ двух проанализированных случаев, а именно лобового столкновения транспортного средства с задним велосипедом и лобового столкновениятранспортногосредства с передним велосипедом, мы смогли сделать следующие выводы:
пен —на hi ** w» ' — "
0»Я1' • \*>№|У *ЧЧ№Х 4»иЭ*О* •* 11 "OW_____________ g#E' I
Йг1^
Рисунок 7. Общее проекционное расстояние велосипедиста
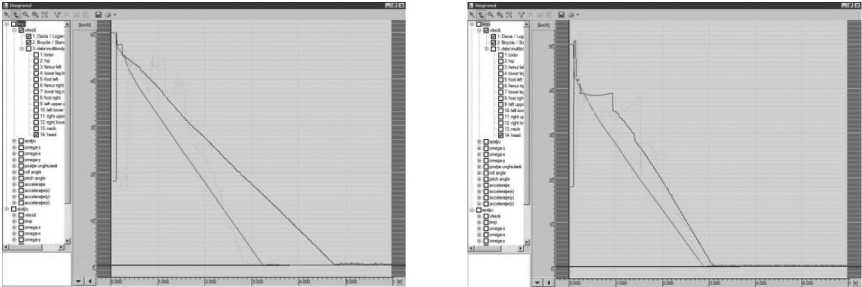
Рисунок 8. Изменение скорости с течением времени – пример 1
Рисунок 9. Изменение скорости с течением времени – пример 2
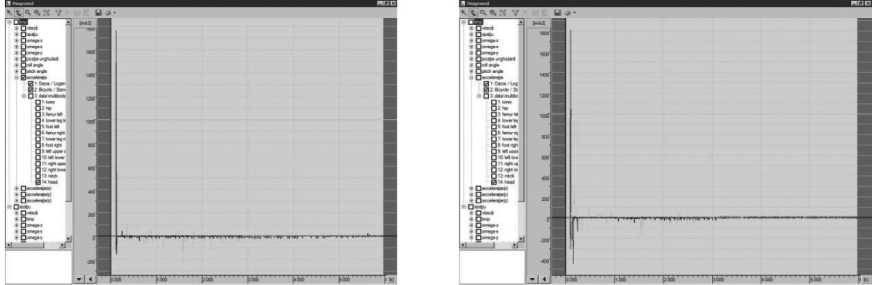
Рисунок 10. Ускорение в области головы велосипедиста: а – удар сзади, б – лобовой удар
При лобовом столкновении было зафиксировано максимальное ускорение в 250 м/с2, в то время как при заднем столкновении максимальное значение ускорения составило 100 м/с2.
Основываясь на результатах, полученных после моделирования столкновения транспортного средства с велосипедом, для двух различных случаев, а именно лобового столкновения транспортного средства с велосипедом сзади и лобового столкновения транспортного средства с велосипедом спереди, мы установили, что, хотя общее проекционное расстояние велосипедиста больше в случае 1, максимальная скорость и ускорение больше в случае 2.
Список литературы Моделирование столкновения транспортного средства с велосипедом
- Тарасов Е.А. Важность применения криминалистических методов при сборе материалов для автотехнической экспертизы обстоятельств ДТП // Адвокатская практика. - 2020. - № 4. - С. 37-43. EDN: FCEFVW
- Матыцин М.А. Основные проблемы назначения и производства судебных экспертиз и пути их преодоления // Эксперт-криминалист. 2013. - № 1. С. 17-20. EDN: PSYLSN
- Россинская Е.Р., Галяшина Е.И., Зинин А.М. Теория судебной экспертизы (Судебная экспертология). Учебник. 2-е издание. - М.: Норма, 2016. - 368 c. EDN: XQOMTF
- Смирнова С.А. Актуальные пути совершенствования судебно-экспертной деятельности в Российской Федерации //Эксперт-криминалист. - 2018. - № 2. - С. 32-34. EDN: XQYRAL
