Моделирование управляемого движения двуногого антропоморфного механизма

Автор: Чигарев А.В., Борисов А.В.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (51) т.15, 2011 года.
Бесплатный доступ
С использованием лагранжева формализма и пакета «Mathematica 6.0.3» получена система дифференциальных уравнений, моделирующих двуногую ходьбу одиннадцатизвенного стержневого механизма с деформируемыми элементами структуры. С целью получения оценок управляющих моментов в приведенных уравнениях была разработана методика пиктографической визуализации движений человека при ходьбе с использованием современных методов и средств видеосъемки. Приближенное решение обратной задачи динамики позволяет искать решение задачи управляемого движения (прямой задачи), используя найденные оценки. С целью получения модели, более адекватной реальным системам, учитывается деформируемость звеньев, что позволит учитывать рекуперацию энергии при естественной ходьбе. Известно, что протезирование, например, только одной ступни снижает энергоэффективность на четверть. Упругостью опорно-двигательной системы человека обусловлена также конечность скорости передачи импульсов при ударном контакте опорной ноги с поверхностью. На основе экспериментального определения оценок управляющих усилий существует возможность описания управления движением антропоморфного механизма с учетом деформируемости звеньев.
Антропоморфный механизм, управляющие моменты, уравнения движения, упругие деформации, анимационная визуализация
Короткий адрес: https://sciup.org/146216240
IDR: 146216240 | УДК: 531/534:
Текст научной статьи Моделирование управляемого движения двуногого антропоморфного механизма
В настоящее время в конструировании антропоморфных механизмов различного назначения актуальной является задача создания энергоэффективных систем, устойчиво движущихся на двух ногах. Теоретическим и экспериментальным исследованиям в этом направлении посвящено много публикаций.
Одним из первых начал изучать процесс двуногого движения Н.А. Бернштейн [3, 4]. Он фиксировал движения человека методом циклосъемки. Этот метод после обработки позволяет определить координаты, углы различных конфигураций человека, а также скорости и ускорения. Моделирование движения ног человека проводилось с помощью шестизвенника.
Исследованиями в этом направлении занимались также сотрудники Центрального научно-исследовательского института протезирования и протезостроения, рассматривая данную проблему с позиций биомеханики и медицины [20, 24].
Чигарев Анатолий Власович, д.ф.-м.н., профессор, завкафедрой теоретической механики, Минск
В работах А.М. Формальского [25] развиты методы построения пяти- и семизвенных механизмов. Пятизвенный механизм состоит из пяти шарнирно сочлененных весомых звеньев, корпуса и двух одинаковых двухзвенных (бедро и голень) ног. В случае семизвенного механизма добавляются стопы, которые считаются невесомыми звеньями.
В работах [1, 2, 11, 12, 15, 17–19, 22, 23, 29–33, 37, 38, 41] описываются различные аспекты моделирования двуногой ходьбы, причем, как правило, авторы ограничиваются анализом механизмов с небольшим числом абсолютно твердых звеньев.
С развитием цифровых средств видеофиксации движений, анимационных возможностей, компьютерной техники стало возможным проводить численноаналитические исследования механизмов с большим числом звеньев, в том числе и с учетом их деформируемости [10, 21, 26, 36, 39, 40, 42].
Как известно, количество костей человека достигает 200, а степеней свободы 240, поэтому одним из путей приближения к реальности является учет как можно большего числа звеньев с упругими, упруго-вязкими свойствами, а также пластических свойств, что связано с накоплением повреждений, ползучестью и разрушением.
Целью работы является определение управляющих моментов для моделирования установившегося процесса ходьбы антропоморфного двуногого механизма и анимационной визуализации его движений.
Данная статья предлагает численно-аналитический метод моделирования двуногой ходьбы, сочетающий в себе данные экспериментов по визуализации процесса ходьбы и определению управляющих моментов реальных людей, применение формализма Лагранжа для получения математической модели с помощью пакета « Mathematica 6.0.3» [27].
Результаты сравниваются с данными, полученными ранее для моделей абсолютно жестких тел [5, 6], и с результатами других исследователей [1, 11, 25].
Рассматривается возможность применения данных результатов для создания двуногих роботов.
Уравнения движения произвольной многозвенной динамической системы С ДЕФОРМИРУЕМЫМИ ЭЛЕМЕНТАМИ СТРУКТУРЫ
Ранее авторами была создана и исследована математическая модель ходьбы антропоморфного механизма с абсолютно твердыми звеньями [5, 6]. Но при расчетах оказалось, что возникают слишком большие толчковые ускорения во время постановки ноги на опору. Силы, возникающие при постановке ноги на опору в такой модели, должны были бы привести к разрушению опорно-двигательного аппарата человека. Однако в реальности этого не наблюдается. Следовательно, подход к описанию ходьбы человека с помощью абсолютно жестких моделей не адекватен реальности. Поэтому необходимо учитывать в процессе ходьбы деформируемость звеньев, из которых состоит опорно-двигательный аппарат человека. Максимальные ускорения звеньев с учетом деформаций снижаются почти на порядок и соответствуют результатам, полученным другими авторами и с помощью других методов измерения [16].
При этом учитывается механизм рекуперации энергии, т.е. кинетическая энергия движения при постановке ноги не полностью диссипирует, а частично переходит в потенциальную энергию упруго деформирующихся звеньев, которая, в свою очередь, при смене опорной ноги частично преобразуется в кинетическую энергию при отталкивании. Скелет и составляющие его звенья работают как рекуператор энергии, преобразующий часть кинетической энергии движения в потенциальную энергию упругого деформирования скелета и обратно. В этом одна из причин энергоэффективности походки человека по сравнению с антропоморфными роботами.
Это следует также учитывать при создании протезов, экзоскелетонов и, в конечном счете, антропоморфных роботов [11].
Если учитывать вязкость, то любое движение будет затухающим. Вязкость играет роль при больших скоростях и ускорениях. Поскольку при обычной ходьбе скорости незначительны, то в дальнейшем исследовании вязкостью пренебрегаем, учитывая только упругие деформации. При чисто упругой деформации возникают периодические колебания, что в реальных телах ведет к появлению и росту микроповреждений, усталости элементов скелета.
Рассмотрим модель ходьбы человека с учетом деформаций опорнодвигательного аппарата на основе одиннадцатизвенной механической системы. Все звенья предполагаются инерционными с массами m i и моментами инерции I i ( i = 1...11). Звенья системы соединяются на концах с помощью шарниров. В каждом подвижном соединении имеется возможность создания вращающего момента M i ( t ).
За счет деформируемости отдельных элементов центр масс каждого звена изменяет свое положение и определяется через изменение длины звена. Координаты центров масс звеньев системы относительно выбранной системы отсчета определяются геометрическими соотношениями.
Для составления уравнений движения воспользуемся уравнениями Лагранжа d ( дL )
д = Q i , д q i
— - dt (5qj где q – обобщенные координаты; Q – обобщенные неконсервативные силы
( = 1, …, n ); L = T – П.
Кинетическая энергия в обобщенных координатах имеет вид
1 n
T = 5 E m 2 i = i
( д П д П
E.., 1 k +^ .
( k = 1 д q k д t )
Поскольку связи, наложенные на систему, стационарны, время не входит явно в уравнение связей и, следовательно, не входит явно в выражения, определяющие Г . В этом случае кинетическая энергия будет однородной квадратичной формой от обобщенных скоростей.
Для -го звена кинетическая энергия имеет вид m v2
C
Т = 2
+ ! Ж
2 ,
где m – масса -го звена; v C – скорость центра масс -го звена; I – момент инерции -го звена относительно его центра масс; (p i. - угловая скорость i -го звена ( i = 1, . „, 11).
Скорость центра масс vCi i-го звена найдем следующим образом: 222
vCi vxCi vyCi .( )
Вертикальная и горизонтальная составляющие скорости i -го звена равны:
dxCi
.
v xCi = dt ; v yCi = dt
Тогда, подставляя выражения для скорости, получаем кинетическую энергию i -го звена.
Запишем потенциальную энергию i -го звена ( i = 1, …, 11):
П / = m i • g • ya +
E i
f к li 0
/
Кинетическая энергия механизма складывается из кинетических энергий отдельных звеньев и корпуса.
n
T = X T . (7)
i = 1
Потенциальная энергия механизма складывается из потенциальных энергий отдельных звеньев и корпуса.
n
П = X П. (8)
i = 1
Обобщенные силы Q i находятся обычным образом из элементарной работы δ A всех сил, приложенных к системе. Для потенциальных сил имеет место соотношение
Q i = –
д П
д qi ’
где в число обобщенных координат входят углы, а в саму потенциальную энергию в общем случае – соответствующие моменты, умноженные на угловые координаты.
Подставляя Т , П, Q i в уравнения Лагранжа, получаем уравнения движения динамической системы.
Модель и уравнения движения стержневой биомеханической системы С ДЕФОРМИРУЕМЫМИ ЭЛЕМЕНТАМИ СТРУКТУРЫ
Для исследования плоского движения биомеханической системы в одноопорной фазе введем неподвижную правую декартову систему координат xyz с началом в точке O и плоскостью xy , в которой происходит движение центра масс. Система имеет две трехзвенные весомые ноги, две двухзвенные весомые руки и весомый корпус. Все элементы структуры являются упругими, и длины стержней являются функциями времени: l i = l i ( t ) ( i = 1, ..., 11). На рис. 1 схематично изображен механизм и введены соответствующие обозначения.
Пусть O 1 A 1 = l 1 , A 1 B = l 2 , B 1 C = l 3 , B 2 C = l 4 , A 2 B = l 5 , O 2 A 2 = l 6 , CG = l 7 , DE 1 = l 8 , E 1 F 1 = l 9 , DE 2 = l 10 , E 2 F 2 = l 11 – длины звеньев биомеханической системы. Положение в одноопорной фазе однозначно определяется углами ф i и длинами стержней l i ( i = 1, ..., 11), поэтому рассматриваемая система имеет двадцать две степени свободы. Обозначим через M i моменты, развиваемые в i -ом шарнире ( i = 1, ..., 11).
Центры масс находятся в точках: С 1 – стопы опорной ноги, С 2 – голени опорной ноги, С 3 – бедра опорной ноги, С 4 – бедра переносной ноги, С 5 – голени переносной ноги, С 6 – стопы переносной ноги, С 7 – корпуса, С 8 , С 10 – плеч, С 9 , С 11 – предплечий. Их положения будем задавать в виде отношений длины от начала соответствующего звена до центра масс ко всей длине звена через множители n i ( i = 1, …, 11), (0 < n i < 1) (если все звенья перенумеровать по номерам индексов у соответствующих углов). Такой способ задания положений центров масс предпочтительней, так как для человека положения центров масс конечностей определяются эмпирическим путем и задаются в процентном отношении одной части звена к другой [17], кроме того, он позволяет учесть изменение положения центра масс во время движения через известные деформации звена.
С помощью m 1 , m 6 ; m 2 , m 5 ; m 3 , m 4 ; m 8 , m 10 ; m 9 , m 11 ; m 7 обозначены массы стопы, голени, бедра, плеч, предплечий и корпуса соответственно. Моменты инерции соответственно обозначены как I 1 – I 11 . Правую и левую конечности механизма будем считать разными.
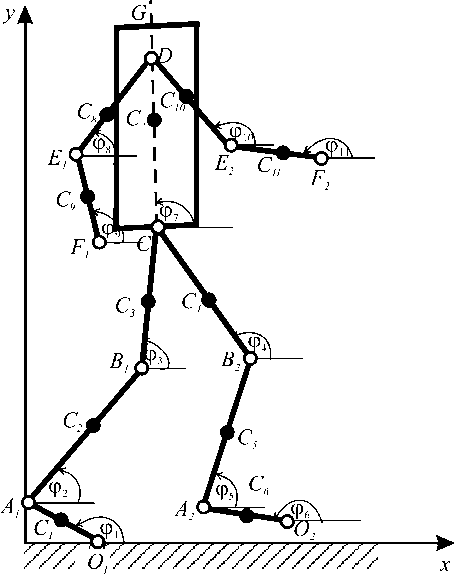
Рис. 1. Модель плоского движения стержневой механической системы с изменяемой геометрией звеньев в одноопорной фазе
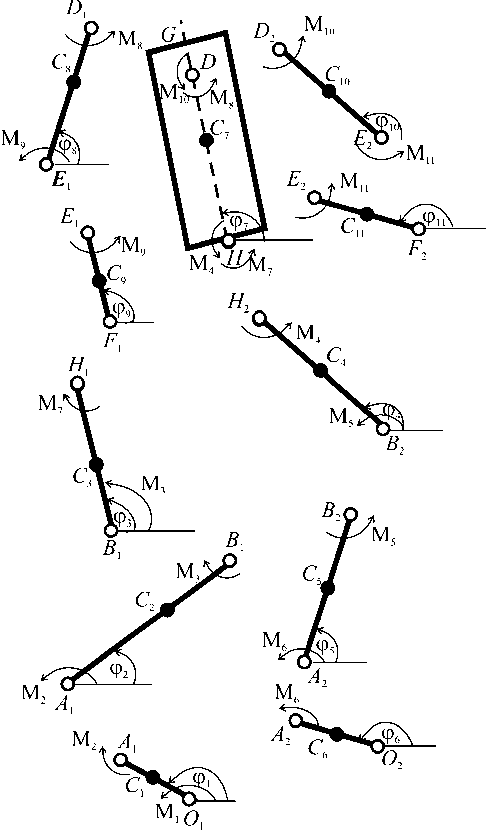
Рис. 2. Декомпозиция плоской механической системы
При расчетах и моделировании движения биомеханической системы все вышеприведенные характеристики берутся равными соответствующим экспериментальным данным человека.
Так как активных внешних сил нет, то движение происходит только под действием внутренних сил и внешних реакций. Связь в точке О 1 реализуется в виде идеального шарнира и является двусторонней, или удерживающей. Предполагаем, что переносимая нога свободная и к ней не прикладываются никакие внешние силы. Обозначения действующих в суставах моментов соответствуют обозначениям углов. Моменты, действующие в системе, изображены на рис. 2. Согласно методу декомпозиции механизм изображен в разделенном на составные звенья виде.
Составим выражение для элементарной работы δA всех сил, приложенных к системе.
δ A = ( M 1 – M 2 )δφ 1 + ( M 2 – M 3 )δφ 2 + ( M 3 – M 7 )δφ 3 +(– M 5 + M 4 )δφ 4 +
+ ( M 5 – M 6 )δφ 5 +( M 6 )δφ 6 +( M 4 + M 7 )δφ 7 +(– M 9 + M 8 )δφ 8 +( M 9 )δφ 9 + (10)
+ (– M 11 + M 10 )δφ 10 +( M 11 )δφ 11 .
Отсюда получаем обобщенные силы. Для краткости запишем обобщенные силы только для первого звена. Всего таких сил 22.
Q 1 = - g1 1 ( m + m 2 + m 3 + m 1 n 1)cos ф 1 + M 1 - M 2,
E El
Q 12 =--1 + —1-1- - g ( m + m 2 + m 3 + m 1 n 1^т ф 1 .
l 1 0 l 1 2 0
Подставляя (3), (6) в (1), получим систему уравнений движения антропоморфного одиннадцатизвенного механизма, описывающую изменение угловых координат звеньев и колебаний длин звеньев механизма. Уравнения получены с использованием символьных методов системы компьютерной математики « Mathematica 6.0.3», что гарантирует правильность математических выкладок [5, 9, 14].
Поскольку полученные уравнения движения антропоморфного механизма существенно нелинейны и весьма громоздки, контроль правильности полученных уравнений осуществлялся с помощью общих теорем динамики [5]. В итоге эти уравнения совпали. Достоверность была проверена с помощью уравнений работы [25]: были получены уравнения пятизвенного (с весомыми конечностями) и семизвенного (с невесомыми стопами) механизмов. С помощью предельного перехода уравнения, полученные для данной модели, также совпали с уравнениями [25].
Отметим, что система дифференциальных уравнений, которая была записана для модели с абсолютно твердыми звеньями [5], не имела существенно более простого вида и также была нелинейной, хотя и менее громоздкой, и решалась численными методами.
Приведем первые уравнения. Структура других уравнений аналогична.
•• ••
( 1 1 + 1 1 2( m + m 2 + m 3 + m 1 n 12 )) ф 1 + 1 1 1 2 ( m + m 3 + m 2 n 2)cos( ф 1 - ф 2) ф 2 +
••
+ 1 1 1 3( m + m 3 n 3)cos( ф 1 - ф 3) ф 3 - 1 1 1 4 mn cos( ф 1 - ф 4) ф 4 - 1 1 1 5 mg cos( ф 1 - ф 5) ф 5 +
+ 1 1 1 5 m s cos( ф 1 - ф б ) ф 6 + 1 1 1 7 m k cos( ф 1 - ф у ) ф 7 + 1 1 1 8 m r cos( ф 1 - ф з ) ф 8 +
♦♦ ♦♦♦♦
+ 1 1 1 9 m p cos( ф 1 - ф 9 ) ф 9 + 1 1 1 10 m r cos( ф 1 - фю) ф 10 + 1 1 1 ii m p cos( ф 1 - фи) ф 11 +
22 / ♦ \• \
+ 1 1 1 2( m + m 3 + m 2 n 2)sin( ф 1 - ф 2) 1ф 2 I + 1 1 1 3( m + m 3 n 3)sin( ф 1 - ф 3) 1ф 3 I -
222 ♦ /♦*/♦*
- 1 1 1 4 m n sin( ф 1 - ф 4 ) 1ф 4 I - 1 1 1 5 m g sin( ф 1 - ф 5 ) 1ф 5 I + 1 1 1 б m s sin( ф 1 - ф б ) 1ф б I +
♦ /♦*/♦*
+ 1 1 1 7 m k sin( ф 1 - ф 7) |ф 7 I + 1 1 1 8 m r sin( ф 1 - ф 8) |ф 8 I + 1 1 1 9 m p sin( ф 1 - ф 9) I ф 9 I +
♦
♦
+ l 1 1 10 m r sin( ф 1 - Ф 10 ) I ф 10 I + 1 1 1 11 m p sin( ф 1 - фц) I Ф 11
+
♦♦
+ gl 1( m + m 2 + m 3 + m 1 n 1)cos ф 1 + 2 1 1( m + m 2 + m 3 + m 1 n 12) 1 1 ф 1 +
♦ ♦ ♦♦
+ 2 1 1( m + m 3 + m 2 n 2)cos( ф 1 - ф 2) 1 2 ф 2 + 2 1 1( m + m 3 n 3)cos( ф 1 - ф 3) 1 3 ф 3 -
♦♦ ♦♦♦♦
-
- 2 1 1 m n cos( ф 1 - ф 4 ) l 4 ф 4 - 2 1 1 m g cos( ф 1 - ф 5 ) l 5 ф 5 - 2 1 1 m s cos( ф 1 - ф б ) l 6 ф 6 +
♦♦ ♦♦♦♦
+ 2 1 1 m k cos( ф 1 - ф 7) 1 7 ф 7 + 2 1 1 m r cos( ф 1 - ф 8) 1 8 ф 8 + 2 1 1 m p cos( ф 1 - ф 9) 1 9 ф 9 +
♦♦♦♦
+ 2 1 1 m r cos( ф 1 - фю) 1 10 ф 10 + 2 1 1 m p cos( ф 1 - фи) 1 п ф 11 - 1 1 ( m + m 3 + m 2 n 2 ) x
♦♦ ♦♦♦♦ x sin(ф1 - ф2) l2 - 11(m + m3n3)sin(ф1 - ф3) l3 + 11 mnsin(ф1 - ф4) l4 +
♦♦ ♦♦♦♦
+ 1 1 m g sin( ф 1 - ф 5) 1 5 - 1 1 m s sin( ф 1 - ф 6) l 6 - 1 1 m k sin( ф 1 - ф 7) l 7 -
♦♦ ♦♦♦♦
-
- 1 1 m r sin( ф 1 - ф 8 ) 1 8 - 1 1 m p sin( ф 1 - ф 9 ) l 9 - 1 1 m r sin( ф 1 - фю) l 10 -
- ♦♦
-
- 1 1 m p sin( ф 1 - ф 11 ) l 11 = M 1 - M 2 ;
♦♦ ♦♦♦♦
1 2( m + m 3 + m 2 n 2)sin( ф 1 - ф 2) ф 2 + 1 3( m + m 3 n 3)sin( ф 1 - ф 3) ф 3 - 1 4 mn sin( ф 1 - ф 4) ф 4 -
♦♦ ♦♦ ♦♦♦♦
- 1 5 m g sin( ф 1 - ф 5 ) ф 5 + 1 5 m s sin( ф 1 - ф б ) ф 6 + 1 7 m k sin( ф 1 - ф 7) ф 7 + 1 8 m r sin( ф 1 - ф 8) ф 8 +
♦♦ ♦♦♦♦
+ 1 9 m p sin( ф 1 - ф 9 ) ф 9 + 1 10 m r sin( ф 1 - фю) ф 10 + 1 11 m p sin( ф 1 - фи) ф 11 -
22 ♦♦
-
- 1 2( m + m 3 + m 2 n 2)cos( ф 1 - ф 2) I ф 2 I - 1 3( m + m 3 n 3)cos( ф 1 - ф 3) 1ф 3 I +
♦ ♦ ♦
+ 1 4 m n cos( ф 1 - ф 4 ) 1ф 4 I + 1 5 m g cos( ф 1 - ф 5 ) 1ф 5 I - 1 6 m s cos( ф 1 - ф 6 ) 1ф 6 I -
222 ♦ /♦* /♦*
-
- 1 7 m k cos( ф 1 - ф 7 ) 1ф 7 I - 1 8 m r cos( ф 1 - ф 8 ) 1ф 8 I - 1 9 m p cos( ф 1 - ф 9 ) 1ф 9 I -
- ♦♦
- 110mrcos(ф1 - фю)I ф10I - 111 mpcos(ф1 - фи) 1ф11I + g(m + m2 + m3 + m 1 n 1)sinф1
-I ♦ \ ♦♦
-
- 2 1 1( m + m 2 + m 3 + m 1 n 12) I ф 1 I + 2( m + m 3 + m 2 n 2)sin( ф 1 - ф 2) 1 2 ф 2 +
♦♦ ♦♦♦♦
+ 2( m + m 3 n 3)sin( ф 1 - ф 3) 1 3 ф 3 - 2 mn sin( ф 1 - ф 4) 1 4 ф 4 - 2 m g sin( ф 1 - ф 5) 1 5 ф 5 -
♦♦ ♦♦♦♦
- 2 m s sin( ф 1 - ф 6 ) 1 6 ф 6 + 2 m k sin( ф 1 - ф 7 ) 1 7 ф 7 + 2 m r sin( ф 1 - ф 8) 1 8 ф 8 +
♦♦ ♦ ♦ ♦♦
+ 2 m p sin( ф 1 - ф 9 ) 1 9 ф 9 + 2 m r sin( ф 1 - фю) 1 10 ф 10 + 2 m p sin( ф 1 - фи) 1 11 ф 11 +
♦♦ ♦♦♦♦
+ ( m + m 3 + m 2 n 2)cos( ф 1 - ф 2) 1 2 + ( m + m 3 n 3)cos( ф 1 - ф 3) 1 3 - mn cos( ф 1 - ф 4) 1 4 -
- m g cos( ф 1 - ф 5) 1 5 + m s cos( ф 1 - ф 6) 1 6 + m k cos( ф 1 - ф 7) 1 7 + mr cos( ф 1 - ф 8) 1 8 +
♦♦ ♦♦♦♦
+ m p cos( ф 1 - ф 9 ) 1 9 + m r cos( ф 1 - фю) 1 10 + m p cos( ф 1 - фи) 1 11
♦♦
+ ( m + m 1 + m 2 + m 3 + m 1 n 1 2) l 1 = 0,
E 1
l 1 0
+ E 1 l 1 + l 1 2 0
где m = m 1 + m 2 + m 3 + m 7 + 2 m 8 + 2 m 9 , m r = m 8 n 8 – m 8 – m 9 , m p = m 9 ( n 9 – 1), m n = m 1 + m 2 + m 3 – m 3 n 3 , m g = m 1 + m 2 – m 2 n 2 , m s = m 1 ( n 1 – 1), m k = m 7 n 7 + 2( m 8 + m 9 ) n 7 R .
Таким образом, составлены уравнения, описывающие изменение угловых переменных и длин стержней одиннадцатизвенной механической системы с деформируемыми элементами, моделирующей движения человека. Уравнения движения механизма в одноопорной фазе представляют собой систему 22 нелинейных дифференциальных уравнений.
Общее решение системы уравнений движения зависит от сорока четырех
произвольных постоянных, поэтому для однозначного определения движения
требуется задать начальные условия движения. Для угловых координат имеют место формулы (14), для колебаний длин звеньев – (15).
Ф 1I , = о =Ф 0; Ф 2 L = о = ф 2 ; ф з L = о = ф З ; Ф 4 L = о = ф 6; Ф 5 L = о = ф 5 ; Ф б I = о = ф 6;
Ф 7I , = о =ф 7 ; Ф 81 = о =Ф 0 ; Ф 91 = о =ф 9 ; Ф 10L = о =ф 0о ; Ф 11L = о = Фп ;
-
• I 0-1 0-1 0-1 0-1 0-1о
Ф1I,=о = Ю1; Ф2 I,=о = Ю2; Фз L=о =Ю3; Ф4 L=о =Ю4; Ф5 L=о ," - Фб I=о ,"- ф7I,=о = ю7; ф8L=о =ю8; ф9L=о = ^; ф 10I,=о = ю0о; ф иI,=о = “11;
li L=о = l1o ; 12 L=о = 12o ; 13 L=о = 13o ; 14 L=о = 14o ; 15 L=о = 15o ; 16 L=о = 16o
-
17 I=о = 17o ; 18 I/=о = 18o ; 1 9 L = о = 19o ’ 110 I/ = о = 116o ; 111 L=о = 111o
11 L=о 11o; 12 L=о 120; 13 L=о 130; 14 L=о 140; 15 L=о 150; 16 L = о
1 7 I , = о 1 7 0 ; 1 8 L = о 1 8 0 ; 1 9 L = о 1 9 0 ; 1 10 L = о 1 10 0 ; 1 11 L = о 1 11 o
Предполагаем, что влияние начальных условий на походку быстро исчезает и
можно рассматривать установившееся движение, поэтому выполняются условия периодичности
Ф i ( / ) =Ф i ( / + T ), ( i = 1, ..., 11) (16)
и условия повторяемости
Ф 1 ( / ) = Ф 6 ( / + T * ) , Ф 2 ( / ) =Ф 5 ( / + T * ) , Ф з ( / ) =Ф 4 ( / + T * ) , Ф 8 ( / ) =Ф 16 ( / + T * )’ Ф 9 ( t ) =Ф 11 ( / + T * )
(вторая нога и рука в точности повторяют движение первой с запаздыванием на время т ).
Когда нога ставится на опору, скорость и ускорение скачком изменяются. В процессе ходьбы переносимая нога становится опорной и наоборот.
Таким образом, формулируется прямая задача динамики – решить полученную систему уравнений с заданной правой частью, которую находим из эксперимента. Определив экспериментально моменты, используем эти результаты в полученных уравнениях и рассмотрим установившийся процесс ходьбы.
Проанализируем один из возможных вариантов учета деформируемости звеньев. Будем считать, что звенья ноги являются двухкомпонентными композитами. Одна компонента имеет упругие модули кости, другая – упругие модули хрящевой ткани. Эффективные модули звеньев рассчитываем по формулам схемы Фойхта
E i Ф = E i (1) c (1) + E i (2) c (2) , c (1) + c (2) = 1,
где E i ( a ) - модуль Юнга для a = 1 - кости, для a = 2 - хрящевой ткани i -го звена,
c ( a ) - объемные концентрации кости ( a = 1) c (
V
V ) кости
' (1) = V y звена /
, хрящевой ткани ( a = 2)
c ( v
V )
ткани
'(2) " V г звена /
.
Для схемы Рейсса имеем
1 = c (1) + c (2)
EiR Ei(1)
Истинное значение модуля Юнга i -го звена E i находится между нижней (Рейсса) и верхней (Фойхта) границами:
EiR ≤ Ei ≤ EiФ.(20)
Оценка модулей упругости по Хиллу [36] определяется согласно формуле
EiH = 12 (EiR + EiФ).(21)
Полученные значения E iH подставим в уравнения динамики (12), (13).
Кости человека при движении не испытывают предельных нагрузок и значительных деформаций (не более 1% [13]). Однако в данной работе учитываются не только деформации костей, но и деформации, связанные с наличием мышечной ткани, сухожилий, суставов, и они больше, чем деформации кости. В общем случае каждый из этих компонентов во время нагрузок и связанных с ними деформаций является нелинейным, но если распределить деформации по всему звену, то эти усредненные деформации в первом приближении будем считать линейными. Исходя из этого упрощения воспользуемся в первом приближении для учета деформаций законом Гука, согласно которому удлинение стержня при упругой деформации пропорционально действующей на стержень силе:
ES
F i = i i ∆ li , (22)
l0i где Fi – сила, действующая на конце i-го стержня, l0i – длина i-го недеформированного стержня, Si – площадь поперечного сечения i-го стержня, Δli – изменение длины i-го стержня, Δli = li – l0i; Ei – модуль Юнга для i-го стержня.
Выражая изменение длины стержня, получаем выражение для деформации звена:
Δ l i =
F i l 0 i
E i S i .
Таким образом, создана механико-математическая модель стержневой биомеханической системы, моделирующая опорно-двигательный аппарат человека и состоящая из одиннадцати деформируемых элементов. Составлены уравнения движения, сформулированы начальные условия, условия контакта и условия непрерывности.
Экспериментальное определение управляющих воздействий
Была проведена съемка движений людей по разработанной авторами методике [39]. Идея фиксации кинематических характеристик движений принадлежит Бернштейну [4], однако в настоящее время с развитием аппаратной базы и современных цифровых технологий она значительно усовершенствована [35]. Для каждого участника эксперимента были определены линейные и инерционные характеристики звеньев кинематической цепи опорно-двигательного аппарата [8]. Их движения записывались с помощью системы видеокамер [7]. Эксперимент проводился на базе Смоленской государственной академии физической культуры, спорта и туризма. В эксперименте принимали участие студенты-спортсмены, профессионально владеющие техникой спортивной ходьбы.
Кадры кинограмм содержат много лишней информации, не нужной для исследования кинематики и динамики движения человека, поэтому возник вопрос об удалении лишней информации и сохранении информации только о движениях звеньев человека.
Исходя из этого появилась необходимость разработки методики моделирования движения человека в виде многозвенной системы. Методику назвали пиктографической визуализацией – вместо изображения человека создается его схематическая модель в виде многозвенного механизма. Движение управляется данными, которые взяты из кинограмм, или данными, которые поставляет программа, решающая дифференциальные уравнения движения.
Анимационное моделирование человека проведено одиннадцатизвенным механизмом, рассмотренным выше.
К достоинству моделирующей программы следует отнести то, что в качестве управления координатами она использует данные из файла. Благодаря этому она становится универсальной, а различия сводятся к методам формирования файла.
Предложенная методика может использоваться для пиктографического моделирования разнообразных движений.
Чтобы определить моменты в суставах, необходимо дифференцировать угловые координаты и длины звеньев механической системы. По полученным экспериментальным точкам строятся аналитические кривые. Пользуясь сплайновой интерполяцией полиномами третьей степени, можно получить первые и вторые непрерывные производные для всего времени движения.
Поскольку бег, ходьба, приседание и т.п. являются циклическими движениями, достаточно рассмотреть один период.
Далее построим для одного шага ряд графиков экспериментально определенных углов в зависимости от времени и графики построенных интерполяционных функций (рис. 3, а ). На рисунке приведены графики углов наклона стопы и голени опорной ноги.

б
Рис. 3. Зависимости от времени за период одного шага: а – угла поворота, б – угловой скорости, в – углового ускорения (индекс 2 относится к голени опорной ноги, 3 – к бедру опорной ноги)

в
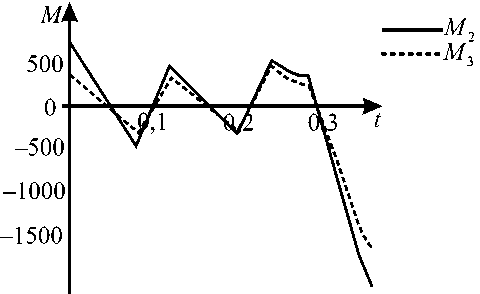
Рис. 4. Зависимости управляющих моментов для стержневой механической системы с деформируемыми звеньями от времени за один период шага: M 2 – коленный сустав опорной ноги, M 3 – тазобедренный сустав опорной ноги
Дифференцируя интерполяционные функции, находим угловую скорость и угловое ускорение (рис. 3, б , в ).
С увеличением темпа ходьбы (обычной) на 38% (с 82 до 114 шагов в минуту) среднее значение угловой скорости в голеностопном суставе составило 66% по сравнению с соответствующими значениями при медленном темпе ходьбы.
По сравнению с четвероногими нога человека испытывает двойную нагрузку при опоре и ходьбе. При этом при каждом шаге стопа испытывает ударные нагрузки, соответствующие (18–20) g , т.е. максимальная ударная нагрузка на стопу при обычной ходьбе в два раза превышает ускорение стартующего космического корабля.
Огромное толчковое ускорение до 70% гасится благодаря сводчатому строению стопы. В итоге на голень действует только (6–7) g , на бедро (4–5) g , на таз (3–4) g , до головы доходит (0,5–1) g ускорения.
Подставляя полученные интерполяционные функции в систему дифференциальных уравнений, выведенных выше, получаем выражения для управляющих моментов. Управляющие моменты необходимо рассчитывать в то время, когда одна нога опорная, другая переносится, и наоборот. Так как ходьба является циклическим движением, то достаточно рассмотреть один период. Стартовые эффекты не исследуются. В итоге получены зависимости, приведенные на рис. 4.
Полученные моменты не являются монотонными функциями. Результат расчета показывает, что среднее значение момента в целом убывает. В центре шага движение идет по инерции, момент в среднем равен нулю. Острые углы и колебания относительно нуля – результат аппроксимации.
Управление носит импульсный характер в начале и конце шага, а в середине фазы идет по инерции, что согласуется с [25].
Видно, что зависимости моментов для опорной ноги подобны, а их максимальные значения убывают по мере подъема от коленного до тазобедренного суставов.
Таким образом, решена обратная задача динамики.
Энергия упругой деформации звеньев механической системы при движении
Работа внешней силы F , запасаемая в упругом стержне в процессе деформирования и возвращаемая при разгрузке (диссипация отсутствует), равна [28] 22
W ( e ) = cisi = Fi , (24)
i 1 → 2 2 2 ci ( )
где с i – жесткость i -го звена, s i – удлинение i -го звена.
В процессе ходьбы при постановке ноги на опору происходит преобразование кинетической энергии в потенциальную энергию деформации скелета, которая при смене ног упруго отдается при отталкивании. Изменение кинетической энергии:
Т i 2 – Т i 1 = F i dl i . (25)
В результате расчетов получаются следующие значения: W 1 = 2,25 Дж, W 2 = 2,25 Дж, W 3 = 1,47 Дж – для опорной ноги. Все остальные значения имеют максимальные значения не более 0,1 Дж и меньше, поэтому здесь они не приводятся.
Решение системы дифференциальных уравнений движения
На основе решения прямой задачи динамики создана анимационная модель антропоморфного механизма, движущаяся на экране компьютера. Управление движением можно осуществить двумя методами:
-
1. В качестве моментов используем данные, полученные из кинограмм. Сопоставляя решение системы с исходными кинограммами, можно проверить корректность всей процедуры моделирования движения антропоморфных механизмов. Для такого сопоставления используем визуализацию движений с помощью методики пиктографической визуализации. Результаты совпадают, что свидетельствует о корректности проведенных исследований и достоверности полученных результатов.
-
2. Моменты задаются исходя из каких-то других соображений (принципа минимума энергии и т.д.).
Во всех рассматриваемых случаях уравнения движения являются системой нелинейных дифференциальных уравнений второго порядка. В связи с большим размером и существенной нелинейностью системы уравнений весьма сложно провести даже численный расчет процесса шага. Численное решение методом Рунге–Кутта проводилось в « Mathematica 6.0.3». Параметры системы брались равными соответствующим параметрам моделируемого человека. Задавались начальные условия исходя из данных эксперимента в начале шага.
В результате решения системы дифференциальных уравнений движения по найденным зависимостям углов от времени созданы анимационные модели движения. Представим несколько кадров соответствующих анимационных пиктографических моделей движения антропоморфного механизма (рис. 5), а также зависимости углового перемещения, скорости и ускорения для звеньев механизма, получающиеся в результате решения системы дифференциальных уравнений движения (рис. 6).
В результате решения системы дифференциальных уравнений движения с заданными управляющими моментами получены зависимости угловых перемещений от времени. По ним проведено анимационное моделирование движения. Сопоставляя с
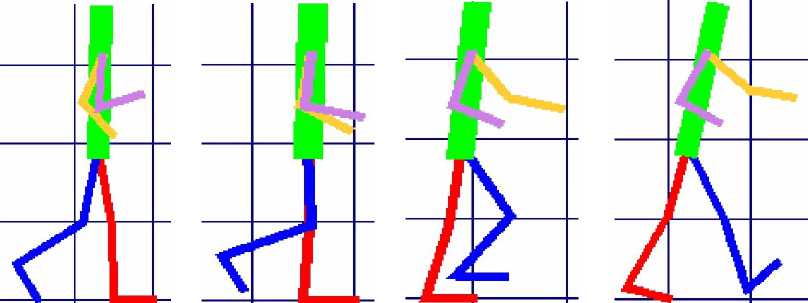
Рис. 5. Кадры анимации движения антропоморфного механизма
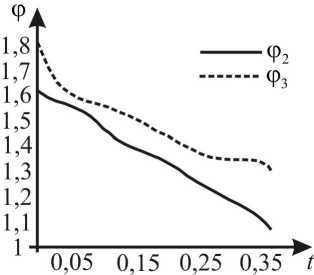
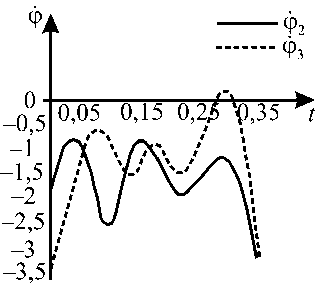
Рис. 6. Зависимости углового перемещения ( a ), скорости ( б ) и ускорения ( в ) (слева направо в строках) от времени для решения системы уравнений (везде индексы 2 относятся к голени опорной ноги, 3 – к бедру опорной ноги)

анимационными моделями, полученными непосредственно с помощью данных кинограмм и кадров кинограмм, видно, что расчетное движение аналогично реальному, и это достаточно убедительно доказывает правильность расчетов и корректность всей процедуры моделирования.
Анализируя построенные зависимости угловых перемещений от времени (см. рис. 3, 6), выявим, что, несмотря на совпадение в целом, возникают отдельные небольшие максимумы и минимумы, которых не было в исходном движении. Это можно объяснить несовершенством предложенной методики фиксирования локомоций человека, так как незначительные изменения, происходящие кратковременно, не были зафиксированы. Однако несмотря на это предложенная модель в целом хорошо описывает движение систем с деформируемыми элементами структуры.
Выводы
-
1. Определенные экспериментально моменты подтверждают выводы А.М. Формальского об импульсном управлении движением.
-
2. Решение прямой задачи численно достаточно надежно подтверждает возможность использования выбранных интерполяционных методов.
-
3. Применение пиктографического метода визуализации движения позволяет упростить систему, сведя ее к системе с сосредоточенными параметрами.
Благодарности
Работа выполнена в рамках и при финансовой поддержке гранта Президента Российской Федерации № МК-2524.2008.1.
Список литературы Моделирование управляемого движения двуногого антропоморфного механизма
- Белецкий В.В. Двуногая ходьба: модельные задачи динамики и управления. -М.: Наука, 1984. -288 с.
- Бербюк В.Е. Динамика и оптимизация робототехнических систем. -Киев: Наукова Думка, 1989. -192 с.
- Бернштейн Н.А. О построении движений. -М.: Медгиз, 1947. -252 с.
- Бернштейн Н.А. Избранные труды по биомеханике и кибернетике. -М.: СпортАкадемПресс, 2001. -296 с.
- Борисов А.В. Составление уравнений движения одиннадцатизвенного антропоморфного механизма при помощи общих теорем с абсолютно твердыми и деформируемыми звеньями//Науч. тр. Междунар. науч.-практ. конф. ученых МАДИ(ГТУ), МСХА, ЛНАУ (29-30 июня 2004 г.). -2004. -Т. 4. -С. 104-110.
- Борисов А.В. Построение движений антропоморфных механизмов с использованием информации об управлении в суставах, полученной от человека.//Человек, здоровье, физическая культура и спорт в изменяющемся мире: XIII Междунар. науч.-практ. конф. по проблемам физического воспитания учащихся. -Коломна, 2003. -Т. 1. -С. 160-161.
- Борисов А.В. Методика съемки циклических движений спортсменов//Сб. науч. тр. молодых ученых. -Смоленск: СГИФК, 2004. -Вып. 11. -С. 16-21.
- Борисов А.В. Методы определения длин конечностей и звеньев человека с расчетом инерционных характеристик//Науч. тр. Междунар. науч.-практ. конф. ученых МАДИ(ГТУ), МСХА, ЛНАУ (5-6 января 2004 г.). -М., 2004. -Т. 4. -С. 77-90.
- Веретенников В.Г. Теоретическая механика. Вывод и анализ уравнений движения на ЭВМ. -М.: Высш. шк., 1990. -174 с.
- Воронов А.В. Анатомическое строение и биомеханические характеристики мышц и суставов нижней конечности. -М.: Физкультура, образование и наука, 2003. -203 с.
- Вукобратович М. Шагающие роботы и антропоморфные механизмы. -М.: Мир, 1976. -541 с.
- Вукобратович М., Стокич Д. Управление манипуляционными роботами: теория и приложения. -М.: Наука, 1985. -384 с.
- Дубровский В.И., Федорова В.Н. Биомеханика. -М.: Владос-Пресс, 2003. -672 с.
- Дьяконов В.П. Mathematica 5.1/5.2/6 в математических и научно-технических расчетах. -М.: СОЛОН-ПРЕСС, 2008. -744 с.
- Загревский В.И. Программирование обучающей деятельности спортсменов на основе имитационного моделирования движений человека на ЭВМ: автореф. дисс. … д-ра физ.-мат. наук. -Томск, 1992.
- Зациорский В.М., Каймин М.А. Биомеханика ходьбы. -М.: 1978. -65 с.
- Зациорский В.М., Аруин А.С., Селуянов В.Н. Биомеханика двигательного аппарата человека. -М.: Физкультура и спорт, 1981. -143 с.
- Зинковский А.В., Макаров Н.В., Шолуха В.А. Компьютерный анализ адекватных моделей антропоморфных локомоций, 1990. -С. 56-60.
- Зинковский А.В., Шолуха В.А. Антропоморфные механизмы, моделирование, анализ и синтез движений. -Л.: СПбГТУ, 1992. -71 с.
- Морейнис И.Ш., Гриценко Г.П., Левит С.Г. Биомеханический анализ ходьбы в норме и на протезах. -М.: ЦНИИПП, 1971. -С. 7-16.
- Новожилов И.В., Кручинин П.А., Копылов И.А. Математическое моделирование сгибательно-разгибательных движений нижних конечностей при изменении вертикальной позы человека. -М.: Изд-во механико-математического факультета, 2001. -52 с.
- Прилуцкий Б.И., Зациорский В.М. Нахождение усилий мышц человека по заданному движению. -
- Н. Новгород, 1993. -С. 81-123.
- Третьяков В.П., Штарк М.Б., Шульман Е.И. Принципы построения и функционирования проблемно-ориентированных программных систем автоматизации исследований в экспериментальной биологии на основе микроЭВМ и КАМАК//Автометрия. -1986. -№ 3. -С. 3-22.
- Фарбер Б.С., Витензон А.С., Морейнис И.Ш. Теоретические основы построения протезов нижних конечностей и коррекции движения. -М.: ЦНИИПП, 1995. -302 с.
- Формальский А.М. Перемещение антропоморфных механизмов. -М.: Наука, 1982. -368 с.
- Чигарев А.В., Михасев Г.И., Борисов А.В. Биомеханика. -Минск: Изд-во Гревцова, 2010. -284 с.
- Чигарев А.В., Кравчук А.И., Кравчук А.С. Основы системы Mathematica 6.0. Задачи и решения. -Минск: Технопринт, 2008. -136 с.
- Циглер Ф. Механика твердых тел и жидкостей. -М.; Ижевск: РХД, 2002. -912 с.
- Capozzo A. A general computing method for the analysis of human locomotion//Journal of Biomechanics. -1975. -Vol. 18. -P. 307-370.
- Dul J., Jonson G.E., Shiavi R., Townsend M.A. Muscular synergism -II. A minimum-fatigue criterion for load sharing between synergist muscles//Journal of Biomechanics. -1984. -Vol. 17. -P. 675-684.
- Dul J., Townsend M.A., Shiavi R., Jonson G.E. Muscular synergism -I. On criteria for load sharing between synergist muscles//Journal of Biomechanics. -1984. -Vol. 17. -P. 663-673.
- Dunfield D.L., Read J.F. Determination of reaction rates by using cubic spline interpolation//The Journal of Chemical Physics. -1972. -Vol. 57, No. 5. -P. 2178-2183.
- Hemami H. Modelling, control, and simulation of human movement//CRC Critical Reviews in Biomedical Engineering. -1988. -Vol. 13, No. 1. -P. 1-34.
- Hill R. The mathematical theory of plasticity. -Oxford: University Press, 1983. http://www.biomotionlab.ca/
- Kedzior K., Zagrajek T. A biomechanical model of the human musculoskeletal system. -Wien, New York: Springer-Verlag, 1997. -P. 125-153.
- Laughlin T.M., Dillman C.J., Lardner T.J. Biomechanical analysis with cubic spline functions//Research Quarterly for Exercise and Sport. -1978. -Vol. 48, No. 3. -P. 569-581.
- Lumb J.R. Computer simulation of biological systems//Molecular and Cellar Biochemistry. -1987. -Vol. 73. -P. 91-98.
- Morecki A. Modeling and simulation and walking robot locomotion. -Wien, New York: Springer-Verlag, 1997. -P. 1-79.
- Nordin M., Frankel H. Basic biomechanics of the musculoskeletal system. -London: Lippicot Williams & Wilkins, 2001. -467 p.
- Schenau I., Van G.J., Bakker K.A. Energy cost of speed-skating and efficiency of work against air resistance//Journal of Biomechanics. -1976. -Vol. 40, No. 4. -P. 584-4591.
- Voronov A.V., Lavrovsky E.K., Zatsiorsky V.M. Modelling of rational variants of the speed-skating technique//Journal of Sport Sciences. -1995. -Vol. 13, No. 2. -P. 153-170.
