Модуль автоматизированного управления педальным узлом автомобиля

Автор: Ботов М.Е., Гурин И.В., Исраелян Г.М.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 10-1 (97), 2024 года.
Бесплатный доступ
В статье рассматривается разработка, проектирование модуля, а также анализируются возможные типы приводов для автоматизированного управления педалями автомобиля, который направлен на улучшение безопасности и эффективности транспортных средств. Модуль разрабатывается с учетом вариативности требований к различным типам автомобилей и условий эксплуатации. Описание включает в себя разработку, проектирование, создание деталей и сборку автоматизированного модуля управления педалями автомобиля.
Модуль управления педалями автомобиля, автоматизация, автомобиль, двигатель постоянного тока, концевые датчики, проектирование
Короткий адрес: https://sciup.org/170206838
IDR: 170206838 | DOI: 10.24412/2500-1000-2024-10-1-137-140
Module of the automated control of the pedal unit of the automobile
The paper deals with the development, design of a module, and analyzes possible types of actuators for automated pedal control of a car, which is aimed at improving the safety and efficiency of vehicles. The module is developed considering the variability of requirements for different types of vehicles and operating conditions. The description includes the development, design, part creation and assembly of the automated vehicle pedal control module.
Текст научной статьи Модуль автоматизированного управления педальным узлом автомобиля
В современных технологиях автомобилей автоматизация играет ключевую роль, значительно повышая безопасность и комфорт водителей и пассажиров. Одной из наиболее перспективных областей автоматизации является управление педалями автомобиля, что может привести к существенным улучшениям в управляемости транспортных средств и снижению вероятности ошибок водителя. Разработка и проектирование модуля для автоматизированного управления педалями автомобиля представляет собой сложную задачу, объединяющую в себе высокие технологии, инновационные решения и глубокое понимание механики транспортных средств. Таким образом, исследование этой темы не только актуально, но и необходимо для понимания будущих трендов в автомобильной промышленности и разработки более безопасных и интеллектуальных транспортных решений [1].
В первую очередь для выполнения данной задачи необходимо было определится с типом двигателей, нажимающих педали. Так как пневматические и гидравлические системы являются как правило крупногабаритными и тяжелыми в эксплуатации в рамках данного проекта, они не подходят для использования [2]. Вся система должна питаться с помощью аккумулятора машины на 12 В, поэтому крупный электропривод [3] также нежелательно использовать. В связи с этим было ре- шены использовать двигатели постоянного тока (далее - ДПТ), так как они малогабаритны и достаточно мощные для того, чтобы выжать педали.
При выборе мотора-редуктора рассматривались несколько вариантов: использование заводского мотора для стеклоподъемника или искать другие варианты моторов. Преимущества первого варианта: легкодоступность, есть возможность сразу начать работу с ним. Преимущества второго варианта: есть возможность выбрать наиболее подходящий под характеристики мотор. По итогу был выбран второй вариант, так как мотор для стеклоподъемника слишком громоздкий и занимает много места, что недопустимо в условиях данной задачи.
После выбора мотора-редуктора были рассмотрены конструкции, их работа и крепления. Было решено, что педаль будет управляться при помощи троса и мотора-редуктора (400 Н нагрузки и частота 60 об/мин). Для крепления моторов будет использоваться специальная металлическая пластина, закрепленная на 2 болтах около рулевой рейки. Так как при размещении ДПТ горизонтально, он мешает движению педали сцепления и упирается в педаль газа, то было решено разместить его вертикально. Пластина была сделана так, чтобы она не мешала ходу педалей, из-за этого левый ДПТ тянет трос под углом, что меняет необходимую нагрузку. Поэтому в дан- ной пластине было предусмотрено отверстие для шкива, который правильно распределяет нагрузки. Для изготовления пластины была взята сталь, так как она достаточно устойчива к деформациям различного типа. Крепеж для моторов был спроектирован с учетом радиуса изгиба стали и с выполнением развертки для дальнейшего изготовления детали (рис. 1).
Также была создана сборочная модель всего узла (рис. 3).
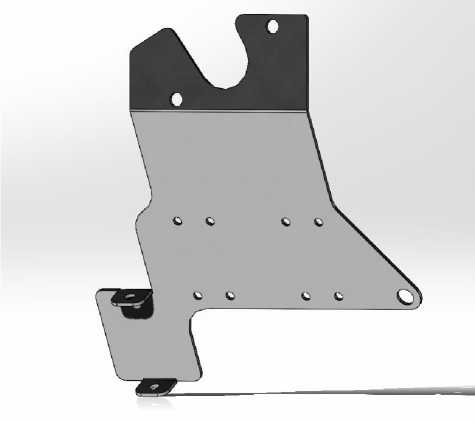
Рис. 1. Модель крепежа для моторов
После проектирования педального модуля, была начата его сборка. Для этого была сделана развертка пластины и распечатана для удобства изготовления. За основу взяли стальную пластину толщиной 2 мм, из нее с помощью развертки была вырезана пластина, в ней сделали отверстия и изогнули ее под углом примерно в 150-160 градусов.
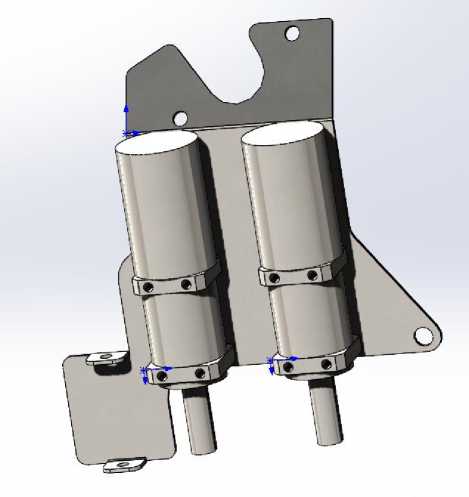
Рис. 2. 3D-модель педального модуля
После изготовления пластины к ней был прикреплен ДПТ, способный выжимать педаль тормоза и имеющий скорость 60 об/мин и было проведено испытание получившейся конструкции. Пластина была зафиксирована в месте крепления карданного шарнира и рулевой рейки, а также на винте крепления электронной педали газа. Для определения конце- вых положений была собрана конструкция с концевыми датчиками, которые воспринимают начальное и конечное положения педалей.
После сборки вся конструкция начала иметь следующий вид (рис. 3).
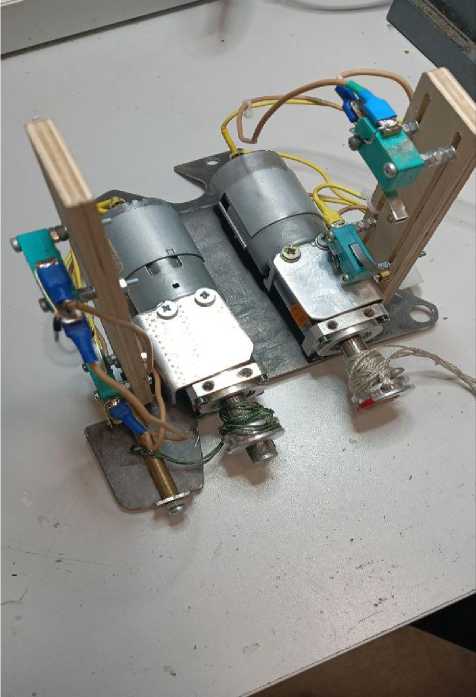
Рис. 3. Сборка педального модуля
В результате данной работы получился модуль, способный нажимать педали сцепления и тормоза автоматизировано, что может быть применено в достаточно большой отрасли автомобилестроения.
Список литературы Модуль автоматизированного управления педальным узлом автомобиля
- Автоматизация производства автомобилей. - [Электронный ресурс]. - Режим доступа: https://clck.ru/3DFUwa.
- Структура приводов и систем автоматического управления. - [Электронный ресурс]. - Режим доступа: https://clck.ru/3DFVAS.
- Электрический привод. - [Электронный ресурс]. - Режим доступа: https://clck.ru/3DFfU3.
