Модульный подход к проектированию рулевого привода многоосного транспортного средства особо большой грузоподъемности

Автор: Козлова А.С., Ипполитова Е.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 12-1 (87), 2023 года.
Бесплатный доступ
В представленной статье рассматривается модульный подход к проектированию транспортных средств особо большой грузоподъемности на примере автономного рулевого привода. Приводится сравнение электрогидравлических рулевых приводов с централизованным источником гидравлического питания и автономным источником гидравлического питания. Проводится анализ основных типов автономных приводов. Был сделан вывод о необходимости установления закономерностей функционирования и создания научно обоснованных принципов проектирования автономного привода в системе рулевого управления многоосного транспортного средства особо большой грузоподъёмности.
Транспортное средство, автономный рулевой привод, электрогидравлический рулевой привод, модульный подход, рулевое управление
Короткий адрес: https://sciup.org/170202009
IDR: 170202009 | DOI: 10.24412/2500-1000-2023-12-1-37-44
A modular approach to the design of the steering drive of a multi-axle vehicle with a particularly high load capacity
The presented article discusses a modular approach to the design of heavy-duty vehicles using the example of an autonomous steering drive. A comparison of electrohydraulic steering drives with a centralized hydraulic power supply and an autonomous hydraulic power supply is presented. The analysis of the main types of autonomous drives is carried out. It was concluded that it is necessary to establish the patterns of functioning and create scientifically sound principles for designing an autonomous drive in the steering system of a multi-axle vehicle with a particularly heavy load capacity.
Текст научной статьи Модульный подход к проектированию рулевого привода многоосного транспортного средства особо большой грузоподъемности
Грузоперевозки играют одну из ключевых ролей в развитии экономики и международных отношений страны. Одним из способов повышения эффективности автомобильных перевозок является использование многоосных транспортных средств особо большой грузоподъемности (далее МТС ОБГ). В «Толковом словаре по автомобильному транспорту» МТС ОБГ определяют как транспортные средства для перевозки грузов от 25 т с числом осей более 3-х [1]. С помощью МТС ОБГ стало возможно перевозить к месту назначения модули цехов, фабрик и заводов, морских доков, буровых установок, корпуса судов, трансформаторы, атомные реакторы и другие крупногабаритные неделимые изделия. Это позволяет повысить надежность работы строящихся объектов, поскольку качество агрегатов и оборудования, собранного непосредственно на строительной площадке, уступает качеству заводской сборки.
В связи с тем, что конструкция МТС ОБГ обусловлена высокими нагрузками, большими размерами при их проектировании особое внимание уделяется системе рулевого управления для обеспечения маневренности и точности подъезда МТС ОБГ к разгрузочно-погрузочным площадкам. Система рулевого управления в общем случае состоит из рулевого механизма и рулевых приводов поворота колес. Рулевой механизм служит для передачи на рулевые приводы поворота колес управляющих команд, сформированных водителем. Рулевой привод поворота колеса предназначен для усиления этой команды и обеспечения поворота колеса на заданный угол [2].
В МТС ОБГ наиболее часто применяется механический рулевой привод (с гидроусилителем и без него), состоящий из традиционных рычагов и тяг. Однако увеличение габаритных размеров и числа осей МТС ОБГ приводит к снижению маневренных свойств транспортного средства, а механическая часть этой системы обладает большим весом и высокой энергоемкостью.
Поэтому в последнее время большое внимание уделяется созданию электрогид-равлических рулевых приводов (далее ЭГРП), как наименее энергоемким систе- мам. На данный момент наибольшее применение в конструкции МТС ОБГ находят ЭГРП с централизованным источником гидравлического питания (рис. 1) для всех исполнительных механизмов, обеспечивающих поворот колес транспортного средства. Однако, применение централизован- ного источника гидравлического питания в МТС ОБГ не позволяет решить проблему снижения энергозатрат в полной мере, т.к. наличие централизованного источника гидравлического питания предполагает применение гидрораспределителей с дроссельным регулированием.
Рис. 1. Схема системы рулевого управления с электрогидравлическим рулевым приводом
и централизованным источником гидравлического питания:
1 – рулевые механизм, 2, 3 – блок управления, 4 – масляный бак, 5 – насос, 6 – гидропневмоаккумулятор; 7 – бустер, 8 – датчики обратной связи с приводом,
9 – кронштейны с рычагами, 10 – поперечные тяги, 11 – сошки
Гидрораспределители с дроссельным регулированием обладают рядом недостатков: нагрев рабочей жидкости, большие потери, и как следствие к низкий КПД. Кроме того возникает необходимость установки гидравлических баков больших размеров и теплообменников для охлаждения рабочей жидкости. Стоит так же отметить большую протяженность гидравлических магистралей рулевого привода с централизованным источником гидравлического питания в составе МТС ОБГ [3]. Проблема является особенно актуальной, поскольку при повреждении одного участка трубопровода из строя выходит вся система рулевого управления.
В настоящее время осуществляются попытки применить принцип модульности для проектирования рулевого привода.
Одним из важнейших принципов такого подхода – членение сложных систем на более простые подсистемы. Этот принцип позволяет более глубоко и детально исследовать простые подсистемы и затем встраивать их в сложную систему. В дальнейшем процессе отрабатываются уже только связи между готовыми подсистемами. Подобный подход практически исключает внутренние ошибки при проектировании подсистем [4]. Кроме того, преимуществом применения модулей в конструкции машин является относительно низкая стоимость благодаря высокой степени интеграции, унификации и стандартизации всех элементов и интерфейсов, компактность конструкций, улучшение массогабаритных и динамических характеристик вследствие упрощения кинематических цепей.
Автономный электрогидравлический рулевой привод (АЭРП) представляет собой локализованную гидравлическую систему, включающую в себя электронный блок, гидравлические, электрогидравличе-ские устройства и исполнительный механизм. Такой модуль обладает рядом преимуществ по сравнению с рулевым приводом с централизованным источником гидравлического питания и механическим рулевым приводом:
-
- возможность применения объёмного регулирования, и как следствие увеличение КПД до 70% по сравнению с 30% КПД дроссельного привода;
-
- большая надежность, так как при выходе из строя одного из приводов, уста-
- новленных на МТС ОБГ, колесо МТС ОБГ будет поворачиваться под воздействием подрессоренной массы за счет кинематики подвески, при этом остальные модули будут продолжать работать в нормальном режиме;
-
- удобство монтажа и обслуживания, т.к. привод колеса представляет собой отдельный модуль [5, 6];
Для реализации модульного подхода к проектированию рулевого привода МТС ОБГ были проанализированы основные типы автономных электрогидравлических приводов.
В электрогидравлическом приводе с объемным регулированием скорости и реверсивным насосом (рис. 2) электродвигатель ЭД вращает вал основного насоса ОН с постоянной скоростью [7].
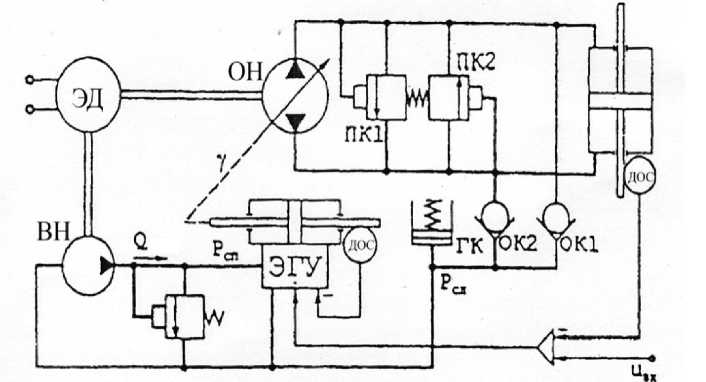
Рис. 2. Автономный электрогидравлический привод с реверсивным насосом:
ЭД - электродвигатель; ОН - основной насос; ВН - вспомогательный насос; ДОС -датчик обратной связи; ГК - пружинный гидрокомпенсатор; ПК1, ПК2 - предохранительный клапан; ОК- обратный клапан; ЭГУ - электрогидравлический усилитель, ОК1, ОК2 -обратный клапан
В качестве основного насоса ОН в приводах такого типа обычно используются аксиально-поршневые насосы, обладающие достаточной быстроходностью и высокими энергетическими показателями. Однако, изменение угла наклона блока цилиндров или изменение угла наклонной шайбы (γ) для регулирования подачи насоса требует применения силы в несколько десятков килограмм [7]. Для этого в схему электрогидравлического привода специально включают следящий электрогидрав- лический сервопривод, питающийся от вспомогательного насоса ВН постоянной производительности. Давление на выходе вспомогательного насоса Рсп поддерживается перепускным клапаном, а минимальное давление в системе Рсл обеспечивает пружинный гидрокомпенсатор ГК.
К недостаткам данной схемы стоит отнести использование реверсивного насоса, для регулировки производительности которого применяют дополнительный сервопривод. Указанная особенность увеличи- вает вес и сложность конструкции привода [8]. Кроме того, аксиально-поршневые насосы являются дорогостоящими гидравлическими устройствами.
В автономном электрогидравлическом приводе c клапаном реверса (рис. 3) ско- рость движения штока гидроцилиндра определяется секундным объемом рабочей жидкости, поступающим от нереверсивного насоса ОН [6].
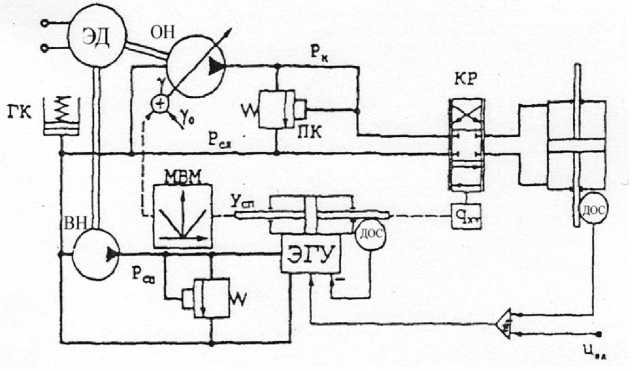
Рис. 3. Автономный электрогидравлический привод c клапаном реверса:
ЭД – электродвигатель; ОН – основной насос; КР – клапан реверса;
ГК – пружинный гидрокомпенсатор; ВН – вспомогательный насос; МВМ – механизм выделения модуля; ДОС – датчики обратной связи; ЭГУ – электрогидравлический усили-
тель
Также как и в предыдущей схеме регулирование подачи насоса осуществляется с помощью вспомогательного сервопривода, питающегося от вспомогательного насоса ВН. Направление движения штока в данной гидросистеме задается клапаном реверса КР, переключающего поток рабочей жидкости в соответствующие полости гидроцилиндра. Сервопривод, помимо изменения положения блока цилиндров ОН, перемещает плунжер клапана реверса (в общем случае через редуктор q). Насос ОН соединен с сервоприводом с помощью механизма выделения модуля (МВМ) перемещения штока сервопривода.
Такое техническое решение привода позволяет использовать более простой и дешевый нереверсивный регулируемый насос и увеличить жесткость в полостях силового цилиндра малонагруженного привода за счет задания некоторой минимальной подачи насоса начальным значением угла γ 0 наклона шайбы [9]. При этом увеличивается жесткость гидродвигателя.
В автономном электрогидравлическом приводе гидростатического типа (рис. 4) бесколлекторный электродвигатель постоянного тока управляется специальным микровычислителем.
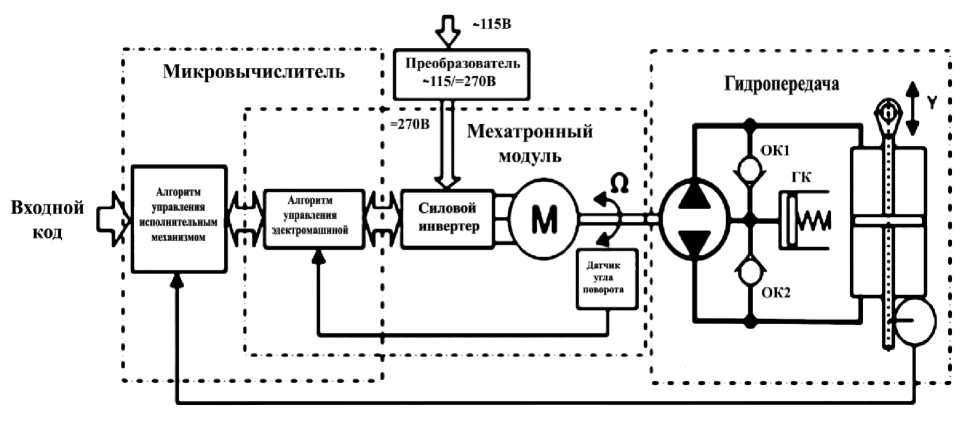
Рис. 4. Автономный электрогидравлический привод гидростатического типа
Скорость выходного звена такого привода регулируется изменением скорости вращения электродвигателя насоса. Механическая энергия, создаваемая электродвигателем, передается объекту управления с помощью нерегулируемого реверсивного насоса и гидроцилиндра, которые образуют гидростатическую передачу [7]. Микроконтроллер этого привода формирует команды на переключение обмоток в зависимости от информации, поступающей с датчика угла поворота электродвигателя. Силовой инвертор регулирует скорость электродвигателя за счет электронной коммутации обмоток бесколлекторно-го электродвигателя постоянного тока, а также управляет током через обмотки, а, следовательно, и моментом, развиваемым электродвигателем. Преобразователь преобразует напряжение переменного тока в высоковольтное напряжение постоянного тока.
Основные достоинства электрогидрав-лического привода гидростатического типа по сравнению с приводами, рассмотренными ранее, это более простая и надежная конструкция в связи с отсутствием вспомогательного сервопривода и насоса, а также экономия энергии и снижение износа трущихся пар, т.к. скорость вращения вала насоса не максимальна, а пропорциональна заданной скорости перемещения исполнительного механизма.
К настоящему моменту был разработан ряд приводов гидростатического типа. Наиболее перспективной является объемно-дроссельный привод или привод с комбинированным регулированием скорости, разработанный предприятием «ПМЗ Восход» (рис. 5) [10, 11].
Автономный электрогидра вл ический привод с комбинированным Управлением скорости выходного звена
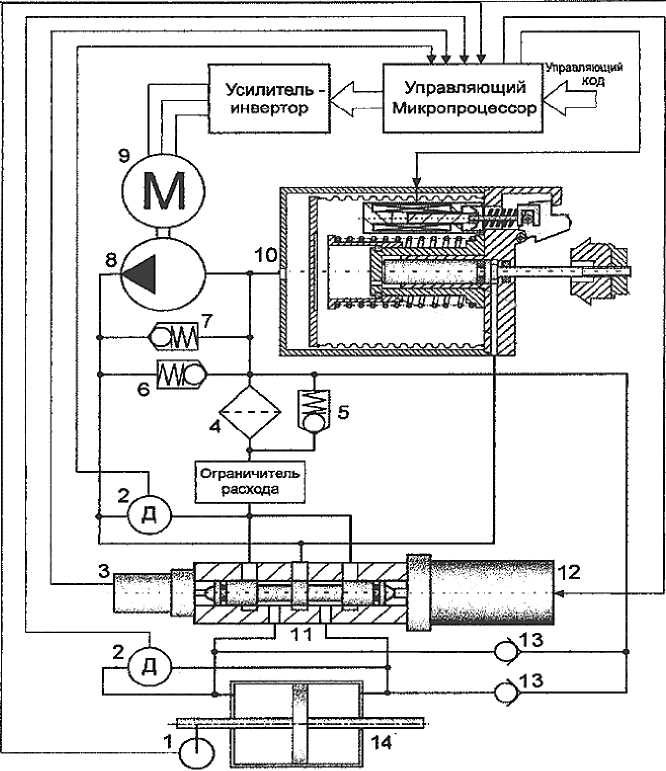
Рис. 5. Объемно-дроссельный электрогидравлический привод гидростатического типа:
1 – ДОС, 2 – датчик перепада давления, 3 –датчик положения клапана реверса, 4 – фильтр, 5,6,7 – предохранительной клапан, 8 – насос; 9 – бесколлекторный электродвигатель постоянного тока, 10 – гидрокомпенсатор, 11 –клапан реверса, 12 –линейный электродвигатель, 13 –клапан подпитки, 14 – гидроцилиндр
Электронные блоки управляющего микропроцессора и усилителя-инвертора обеспечивают работу бесколлекторного электродвигателя постоянного тока 9. В гидравлической части используется нереверсивный нерегулируемый насос 8 и клапан реверса 11, представляющий собой золотниковый гидрораспределитель с пропорциональным управлением с большой площадью рабочих окон, обеспечивающих малый (порядка нескольких атмосфер) перепад давления на полностью открытых окнах даже при максимальной подаче насоса [11]. Клапан реверса управляется микропроцессором с помощью линейного электродвигателя 12. Регулирование скорости поршня происходит следующим образом. При малых сигналах рассогласования скорость выходного звена регулируется золотниковым клапаном, подобно тому, как происходит в дроссельном приводе. При больших и средних сигналах рассогласования реализуется объемный способ регулирования, т.е. абсолютная величина скорости перемещения штока гидроцилиндра 14 регулируется подачей насоса 8
при значительных открытиях окон золотника.
Конструкция данного привода позволяет применять более простые и компактные нереверсивные нерегулируемые насосы. Принятый способ регулирования позволяет при больших и средних сигналах рассогласования реализовать объемный способ регулирования скорости и там самым обеспечить высокий КПД, а при малых сигналах обеспечить требуемую точность, используя дроссельной принцип регулирования скорости.
Однако, данная схема включает в себя большое количество сложных электрогид-равлических и гидравлических устройств, повышающих стоимость системы и снижающих ее надежность. Так, использование взводимого гидрокомпенсатора 10, поддерживающего избыточное давление в сливной магистрали, приводит к усложнению процедуры запуска привода и требует наличия системы аварийного отключения в случае выхода гидрокомпенсатора из строя. Комбинированный способ управления скоростью выходного звена требует специального алгоритма для перехода с режима дроссельного регулирования на объемное, и значительно усложняет конструкцию клапана реверса [12]. Такая схема привода была разработана для рулевых приводов самолета, к которым предъявляются высокие требования к частоте срабатывания руля.
Из проведенного анализа можно делать следующие выводы. Модульный подход к проектированию рулевого привода МТС ОБГ является одним из перспективных направлений создания автомобилей нового поколения. Анализ типов приводов, используемых в автомобилестроении, показал, что при проектировании системы рулевого управления МТС ОБГ наиболее целесообразно применение автономного электрогидравлического рулевого привода. Однако на сегодняшний день можно говорить, об отсутствии научно обоснованных принципов построения автономного привода в системе рулевого управления МТС ОБГ. Рассмотрение существующих типов автономных электрогидравлических приводов показало, что проанализированные приводы обладают недостатками, ставящими под вопрос рациональность их использования в системе рулевого управления МТС ОБГ. Таким образом, на основании проведенного анализа сделан вывод о том, что необходимо установить закономерности функционирования и основные принципы построения привода системы рулевого управления МТС ОБГ.
Список литературы Модульный подход к проектированию рулевого привода многоосного транспортного средства особо большой грузоподъемности
- Егоров Ю.И. Толковый словарь по автомобильному транспорту: основные термины. - М.: Русский язык, 1989. - 228 с.
- Проектирование полноприводных колесных машин: Учебник для вузов: В 3 т. / Б.А. Афанасьев [и др.]; Под ред. А.А. Полунгяна. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. - 432 с.
- Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет. Под общей ред. Б.Н. Белоусова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. - 728 с.
- Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. Пособие для студентов вузов, 2-е изд. - М.: Машинсотроение, 2007. - 256 с.
- Белоусов Б.Н., Климачкова А.С. Проектирование и моделирование привода рулевого управления как ключевого элемента мехатронного опорно-ходового модуля // Мехатрони-ка автоматизация управление. - 2015. - Т. 16, №7. - С. 484-491.
- Белоусов Б.Н., Климачкова А.С. Транспортная мехатроника - будущее автомобиля // Мехатроника автоматизация управление. - 2015. - Т. 16, №1. - С. 38-43.
- Редько П.Г. Повышение безотказности и улучшение характеристик электрогидравлических следящих приводов. - М.: Янус-К, 2002. - 230 с.
- Хомутов В.С. Улучшение статических и динамических характеристик электрогидростатического привода в области малых сигналов управления: автореф. ... дис. канд. техн. наук. - Москва. 2009. - 20 с.
- Гидравлические агрегаты и приводы управления полётом летательных аппаратов / П.Г. Редько [и др.]. - М.: Олитаю, 2004. - 472 с.
- Алексеенков А.С., Найденов А.В., Селиванов А.М. Перспективы развития автономных электрогидравлических приводов // Известия Тульского государственного университета. Технические науки. - 2011. - Вып. 5, ч. 1. - С. 35-39.
- Автономный электрогидравлический привод с комбинированным управлением скорости выходного звена: патент № 2305211 РФ / А.М. Селиванов [и др.]; заявл. 19.07.2005; опубл.27.08.2007. Бюлл. №24.
- Автономный электрогидравлический следящий привод: патент № 2529965 РФ / Б.Н. Белоусов, С.В. Наумов, А.С. Климачкова; заявл.17.04.2013; опубл.11.08.2014. Бюлл. №28.
